四元数矩阵转化
- 格式:docx
- 大小:17.14 KB
- 文档页数:5

eigen 四元数变换矩阵-概述说明以及解释1.引言1.1 概述概述概述部分将介绍本篇文章的主题以及提供对Eigen库、四元数和变换矩阵的基本理解。
本文主要关注于介绍Eigen库中四元数与变换矩阵的相关概念和实现方法,并提供一些应用实例。
在图形学和机器人学等领域,四元数和变换矩阵是非常重要的数学工具。
四元数是一种数学结构,可用于表示和操作三维旋转的姿态。
它们广泛应用于姿态估计、路径规划和机器人控制等领域。
变换矩阵则是用于在三维空间中表示和处理旋转、平移和缩放等变换的数学工具。
它们在计算机图形学中被广泛使用,用于模型变换、相机投影和场景渲染等应用。
Eigen库是一个C++模板库,提供了高性能的线性代数和数值计算功能。
它具有简洁的接口和高度优化的实现,使得它成为处理数学计算和矩阵运算的首选工具。
Eigen库广泛应用于机器人学、图像处理和物理模拟等领域。
本文将首先介绍Eigen库的基本概念和使用方法,以帮助读者快速上手。
接着,将详细介绍四元数的定义、运算规则和几何意义,以及它们与变换矩阵之间的关系。
最后,将展示如何在Eigen库中使用四元数和变换矩阵,并提供一些实际应用实例,以加深读者对这些概念的理解和应用能力。
总结起来,本文将提供一个关于Eigen库、四元数和变换矩阵的综合指南,旨在帮助读者理解和应用这些重要的数学工具。
阅读本文后,读者将能够在自己的项目中有效地使用Eigen库中的四元数和变换矩阵,并将它们应用于机器人、图形学和相关领域的实际问题中。
1.2 文章结构文章结构部分的内容包括了引言、正文和结论三个部分。
引言部分是整篇文章的开头,用于引入文章的主题和背景,并对文章的主要内容进行概述。
在本篇文章中,引言部分主要包括概述、文章结构、目的和总结四个小节。
概述部分用于简要介绍文章的主题,即Eigen四元数变换矩阵。
文章结构部分用于介绍整篇文章的组织结构和各个部分的内容安排。
目的部分用于说明撰写本文的目的是什么,可以是解决某个问题、讨论某个现象或者介绍某个知识点等。
四元数学习之四元数和矩阵的转换四元数学习之四元数和矩阵的转换四元数是⼀种可以替代矩阵和欧拉⾓的数学⼯具。
他最初是由William Rowan Hamilton发现的(参考维基百科),它的最⼤的特点是不满⾜交换率。
也谈⼀下⾃⼰对这⼀点的体会。
在离散数学中有讲到半群、群、环和域的概念,其中环的定义是具有交换率和分配率(详情参考环的数学定义),⽽域的概念则是在环的基础上加上了交换率。
所以说四元数⽆法满⾜域的定义,它是除法环的⼀种。
何为除法环?其实很简单,被除数和除数都满⾜结合律和分配律,但是如果要满⾜交换律,即被除数和除数交换位置,那么它的结果是不同的(准确地说,如果它们不为0的话,那么结果呈倒数关系)。
⼜由于要在四维解空间上解得i3=-1,所以只能在不满⾜交换率的条件下得出i、j、k。
四元数在计算机图形学的优势在于运算量⼩和利于插值,且旋转没有缺陷。
可是普通的⼀个四元数定义⼜⽐较难懂,⽽且OpenGL的API 中⼜没有带四元数的参数的函数,所以需要我们根据公式做⼀做⼩⼩的转换。
设四元数Q(x, y, z, w)表⽰向量a(x a,y a, z a)经过α⾓旋转后的结果,则x、y、z和w分别为:x= sin(α/2)·x ay= sin(α/2)·y az= sin(α/2)·z aw= cos(α/2)在中讲到了如何⽤⼀个矩阵表⽰坐标系沿向量的旋转,这⾥我直接给出公式:将这两个公式结合起来。
再结合⾼中所学的半⾓公式:sinα = 2sin(α/2)·cos(α/2)cosα = cos2(α/2) - sin2(α/2)cos2(α/2) = (1 +cosα)/2sin2(α/2) = (1 -cosα)/2可以解出⽤四元数表⽰旋转矩阵为:该来验证⼀下公式的正确性,同样地,采⽤OpenGL托管的矩阵来测试,看看使⽤⾃带的glRotatef()函数和我们写的公式相⽐,究竟有没有差距。
glm 四元数转换矩阵-概述说明以及解释1.引言1.1 概述四元数(Quaternion)是数学中的一种扩展复数,广泛应用于3D计算机图形学和空间几何运算等领域。
它由一个实部和三个虚部组成,具有一些独特的性质和优点。
在图形学中,四元数被用于表示和计算物体的旋转,相比其他表示旋转的方法,如欧拉角和旋转矩阵,四元数具有更简洁和高效的计算方式。
本文将首先介绍球面线性插值(Spherical Linear Interpolation, 简称SLERP)的概念及其在计算机图形学中的应用。
接下来,我们将详细探讨四元数的定义和性质,包括四元数的运算法则、单位四元数的特点等。
最后,我们将重点讲解四元数与旋转矩阵之间的相互转换关系,包括如何将一个旋转矩阵转换为对应的四元数表示,以及如何从四元数恢复出旋转矩阵。
通过深入理解四元数与旋转矩阵之间的转换关系,我们可以更好地理解和应用四元数在3D图形学中的作用。
对于计算机图形学从业者来说,这是一个非常重要的基础知识。
此外,我们还将展望四元数在虚拟现实、计算机动画等领域的应用前景,并提出相关讨论和建议。
通过阅读本文,读者将能够理解四元数转换矩阵的原理和算法,并能够应用于实际问题中。
无论是从事计算机图形学研究还是从事相关行业工作的人士,本文的内容都将对他们的工作产生积极的影响和帮助。
总结起来,本文旨在为读者提供一份系统而全面的关于glm四元数转换矩阵的学习材料,并希望能够激发更多人对这一领域的兴趣和研究。
1.2文章结构文章结构部分的内容可以写成以下样式:2. 正文2.1 球面线性插值2.2 四元数的定义和性质2.3 四元数到旋转矩阵的转换在正文部分,我们将着重介绍GLM(OpenGL 数学库)中的四元数转换矩阵的相关知识。
首先,我们将会详细讨论球面线性插值算法的原理和应用,以便更好地理解四元数和矩阵之间的转换关系。
接下来,我们将会介绍四元数的定义和性质。
四元数是一种复数的扩展形式,具有独特的性质和运算规则。
球形四元数和旋转矩阵
球形四元数是一种用来表示三维空间中的旋转的数学工具,它可以与旋转矩阵进行互相转换。
球形四元数通常表示为q = (w, x, y, z),其中w是实部,(x, y, z)是虚部。
它们有以下性质:
1. 平方和等于1:w^2 + x^2 + y^2 + z^2 = 1
2. 与旋转矩阵的关系:给定一个单位四元数q = (w, x, y, z),对应的旋转矩阵R可以表示为:
R = | 1 - 2y^2 - 2z^2 2xy - 2wz 2xz + 2wy | | 2xy + 2wz 1 - 2x^2 - 2z^2 2yz - 2wx |
| 2xz - 2wy 2yz + 2wx 1 - 2x^2 - 2y^2 |
3. 从旋转矩阵到四元数的转换:根据旋转矩阵的信息可以计算出对应的四元数。
四元数和旋转矩阵都是用来描述旋转的数学工具,它们可以用来表示三维空间中的任意旋转。
在实际应用中,它们有着不同的优势和适用场景,可以根据具体情况选择使用其中的一种或者进行相互转换。

四元数乘法矩阵形式
我们要找出四元数乘法的矩阵形式。
首先,我们需要了解四元数的基本定义和乘法规则。
四元数是由一个实数和三个虚部的复数组成的,通常表示为 q = w + xi +
yj + zk,其中 w, x, y, z 是实数,i, j, k 是虚部单位,满足 i^2 = j^2 = k^2 = -1。
四元数的乘法规则如下:
1. 实部之间和虚部之间不进行乘法。
2. 虚部单位 i, j, k 之间进行叉积运算。
用数学公式,我们可以表示为:
(w+xi+yj+zk) × (w'+x'i+y'j+z'k) = (ww' - x'x - y'y - z'z) + (w'x + x'w + y'z - z'y)i + (w'y - x'z + x'y + z'w)j + (w'z + x'y - x'z + y'w)k
为了将这个公式转换为矩阵形式,我们可以将每个虚部单位视为一个列向量,并使用矩阵乘法来表示它们之间的叉积。
计算结果为:(2, 2, -2, 2)
所以,四元数乘法的矩阵形式为:
实部:ww' - x'x - y'y - z'z 虚部i:w'x + x'w + y'z - z'y 虚部j:w'y - x'z + x'y + z'w 虚部k:w'z + x'y - x'z + y'w。

旋转矩阵到四元数的转换python在计算机图形学和计算机视觉中,旋转是一个非常重要的操作。
旋转矩阵是用来描述物体在三维空间中的旋转的一种数学工具。
然而,在某些情况下,我们可能需要使用四元数来表示旋转。
本文将介绍如何将旋转矩阵转换为四元数的方法。
1. 旋转矩阵的表示旋转矩阵是一个3x3的矩阵,用来描述物体绕着某个轴旋转的情况。
旋转矩阵通常用R表示,其中R的每一列都是物体坐标系中的一个基向量在世界坐标系中的表示。
例如,R的第一列表示物体坐标系的x轴在世界坐标系中的表示。
2. 四元数的表示四元数是一种数学工具,可以用来表示三维空间中的旋转。
一个四元数可以写成q = s + xi + yj + zk的形式,其中s是实部,(x, y, z)是虚部。
四元数可以进行加法、减法和乘法运算,还可以进行归一化操作。
3. 旋转矩阵到四元数的转换旋转矩阵到四元数的转换可以通过以下步骤实现:步骤1:计算旋转矩阵的迹旋转矩阵的迹是指对角线元素的和,可以表示为trace(R) = R11 + R22 + R33。
步骤2:根据迹的值选择适当的计算公式根据旋转矩阵的迹的值,可以选择不同的计算公式来计算四元数的各个分量。
当迹的值大于0时,计算公式如下:s = sqrt(trace(R) + 1) / 2x = (R32 - R23) / (4s)y = (R13 - R31) / (4s)z = (R21 - R12) / (4s)当迹的值小于等于0时,需要进一步判断迹的最大元素的位置:如果R11是迹的最大元素,则计算公式如下:s = sqrt(R11 - R22 - R33 + 1) / 2x = (R12 + R21) / (4s)y = (R13 + R31) / (4s)z = (R23 - R32) / (4s)如果R22是迹的最大元素,则计算公式如下:s = sqrt(R22 - R11 - R33 + 1) / 2x = (R21 + R12) / (4s)y = (R23 + R32) / (4s)z = (R31 - R13) / (4s)如果R33是迹的最大元素,则计算公式如下:s = sqrt(R33 - R11 - R22 + 1) / 2x = (R31 + R13) / (4s)y = (R32 + R23) / (4s)z = (R12 - R21) / (4s)步骤3:归一化四元数将四元数的实部和虚部都除以s,即可得到归一化的四元数。

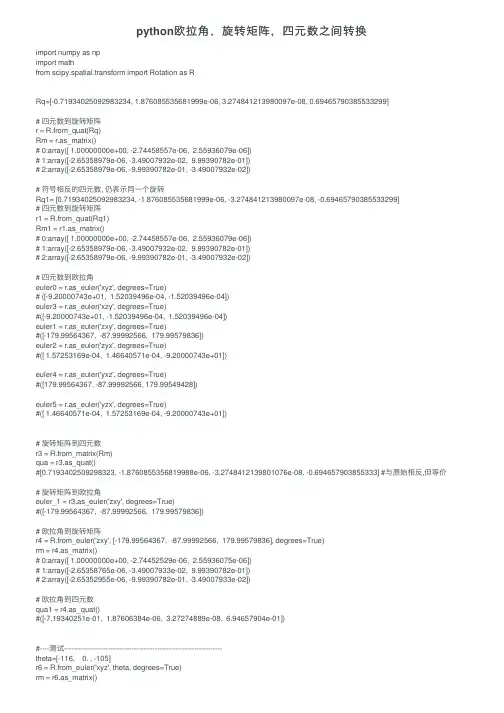
四元数,欧拉角,矩阵的相互转换网上太多的将转换的了,翻来覆去转载没有意义。
奉上源码,TC下直接编译即可~~在附上编译好了的exe可以直接下载运行~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~不华丽的分割~~以下是源码~~~~~~~~~~~~~~~~~~~~~~/* 输入欧拉角,能看到四元数,以及再转换回去成欧拉角Yaw范围(-180~180)Pitch范围(-90~90)Roll范围(-180~180)*/#include "stdio.h"#include "math.h"#include"conio.h"main(){float theta_z , theta_y ,theta_x ;floatcos_z_2;float cos_y_2;float cos_x_2;float sin_z_2;floatsin_y_2;float sin_x_2;float Pitch;float Roll;float Yaw;floatQ[4];float T[3][3];do{printf("/nYaw =");scanf("%f",&theta_z);printf("/nPitch =");scanf("%f",&theta_y);printf("/nRoll =");scanf("%f",&theta_x);theta_z =theta_z*3.1416/180;theta_y = theta_y*3.1416/180;theta_x = theta_x*3.1416/180;cos_z_2 = cos(0.5*theta_z);cos_y_2= cos(0.5*theta_y);cos_x_2 = cos(0.5*theta_x);sin_z_2 = sin(0.5*theta_z);sin_y_2 = sin(0.5*theta_y);sin_x_2 =sin(0.5*theta_x);Q[0] = cos_z_2*cos_y_2*cos_x_2 +sin_z_2*sin_y_2*sin_x_2;Q[1] = cos_z_2*cos_y_2*sin_x_2 - sin_z_2*sin_y_2*cos_x_2;Q[2] = cos_z_2*sin_y_2*cos_x_2 + sin_z_2*cos_y_2*sin_x_2;Q[3] =sin_z_2*cos_y_2*cos_x_2 -cos_z_2*sin_y_2*sin_x_2;printf("/nQ=[ %f %f %f %f]/n/n",Q [0],Q[1],Q[2],Q[3]) ;printf("alpha= %f/n/n",acos(Q[0])*2*180/3.1416) ;T[0][0] =Q[0]*Q[0]+Q[1]*Q[1]-Q[2]*Q[2]-Q[3]*Q[3] ;T[0][1] =2*(Q[1]*Q[2]-Q[0]*Q[3]);T[0][2] =2*(Q[1]*Q[3]+Q[0]*Q[2]);T[1][0] =2*(Q[1]*Q[2]+Q[0]*Q[3]);T[1][1] =Q[0]*Q[0]-Q[1]*Q[1]+Q[2]*Q[2]-Q[3]*Q[3] ;T[1][2] =2*(Q[2]*Q[3]-Q[0]*Q[1]);T[2][0] =2*(Q[1]*Q[3]-Q[0]*Q[2]);T[2][1] =2*(Q[2]*Q[3]+Q[0]*Q[1]);T[2][2] =Q[0]*Q[0]-Q[1]*Q[1]-Q[2]*Q[2]+Q[3]*Q[3] ;printf("T[0][0]= %9f,T[0][1] = %9f,T[0][2]= %9f/n",T[0][0],T[0][1],T[0][2]);printf("T[1][0] = %9f,T[1][1] = %9f,T[1][2] = %9f/n",T[1][0],T[1][1],T[1][2]);printf("T[2][0]= %9f,T[2][1] = %9f,T[2][2]= %9f/n/n",T[2][0],T[2][1],T[2][2]);Pitch = asin(-T[2][0]);Roll = atan( T[2][1]/T[2][2]);Yaw =atan( T[1][0]/T[0][0]);if(T[2][2]{if(Roll {Roll =Roll+3.1416;}else{Roll =Roll-3.1416;}}if(T[0][0]{if(T[1][0]>0){Yaw = Yaw +3.1416;}else{Yaw = Yaw - 3.1416;}}printf("Yaw = %f/nPitch = %f/nRoll= %f/n",Yaw*180/3.1416,Pitch*180/3.1416,Roll*180/3.141 6) ;}while(1);printf("Hello, world/n");getch();}。
欧拉角转四元数转旋转矩阵欧拉角、四元数和旋转矩阵是常用的表示旋转的方法。
在计算机图形学、机器人学等领域广泛应用。
本文将介绍如何将欧拉角转换为四元数,以及如何将四元数转换为旋转矩阵。
欧拉角是表示旋转的一种方式,它包括三个角度值:俯仰角、偏航角和滚转角。
欧拉角的表示方法有很多种,如 XYZ、ZYZ 等。
这里我们以 XYZ 欧拉角为例。
XYZ 欧拉角表示先绕 x 轴旋转一定角度,再绕 y 轴旋转一定角度,最后绕 z 轴旋转一定角度。
欧拉角的旋转顺序是很重要的,不同的旋转顺序会得到不同的旋转结果。
四元数是一种表示旋转的数学工具,它包含一个实部和三个虚部,可以用一个四维向量表示。
四元数的运算比矩阵运算更快,也更容易组合多个旋转。
四元数旋转的基本原理是将旋转轴和旋转角度转换为一个四元数,然后将这个四元数与待旋转向量相乘得到旋转后的向量。
旋转矩阵是一个 3x3 的矩阵,它可以用来将一个向量绕某个轴旋转一定角度。
旋转矩阵的每一列表示旋转后的 x、y、z 轴方向的向量。
旋转矩阵的乘法是不可交换的,即不同的旋转顺序会得到不同的旋转结果。
下面将介绍如何将欧拉角转换为四元数,以及如何将四元数转换为旋转矩阵。
1. 欧拉角转四元数将 XYZ 欧拉角转换为四元数的公式如下:q = cos(roll/2) * cos(pitch/2) * cos(yaw/2) + sin(roll/2)* sin(pitch/2) * sin(yaw/2) * i- sin(roll/2) * cos(pitch/2) * sin(yaw/2) * j + cos(roll/2) * sin(pitch/2) * sin(yaw/2) * k其中,roll、pitch、yaw 分别表示滚转角、俯仰角和偏航角。
i、j、k 分别表示四元数的虚部,它们满足 i^2=j^2=k^2=ijk=-1。
2. 四元数转旋转矩阵将四元数转换为旋转矩阵的公式如下:R = [1-2*(qj^2+qk^2), 2*(qi*qj-qk*qr), 2*(qi*qk+qj*qr)] [2*(qi*qj+qk*qr), 1-2*(qi^2+qk^2), 2*(qj*qk-qi*qr)][2*(qi*qk-qj*qr), 2*(qj*qk+qi*qr), 1-2*(qi^2+qj^2)] 其中,q 是一个四元数,qi、qj、qk、qr 分别表示四元数的虚部和实部。

eigen中旋转矩阵与四元数之间的相互转换Eigen是一个用于线性代数的C++库,其中包含多种表示旋转的方式,包括旋转矩阵和四元数。
Eigen通过提供旋转矩阵和四元数之间的相互转换函数,使得用户可以在两种表示形式之间便捷地转换。
旋转矩阵(Rotation Matrix)是一个3x3的正交矩阵,表示从一个坐标系向另一个坐标系进行旋转的变换矩阵。
旋转矩阵的每一行(或每一列)都是一个单位向量并且互相垂直,因此旋转矩阵具有正交性质。
在Eigen中,旋转矩阵可以用Matrix3d或MatrixXd表示,其中Matrix3d表示一个静态大小的3x3矩阵,而MatrixXd表示一个动态大小的矩阵。
四元数(Quaternion)是一个具有实部和虚部的扩充复数,其中虚部是一个三维向量。
四元数可以用来表示任意旋转,其旋转轴与旋转角度可以从虚部中获取。
在Eigen中,四元数可以用Quaterniond 或QuaternionXd表示,其中Quaterniond表示双精度精度的四元数,而QuaternionXd可以表示任意大小的四元数。
旋转矩阵到四元数的转换可以使用RotationMatrixToQuaternion 函数,该函数可以将一个旋转矩阵转换为一个四元数。
同时,四元数到矩阵的转换可以使用QuaternionToRotationMatrix函数,该函数可以将一个四元数转换为一个旋转矩阵。
下面是旋转矩阵到四元数的转换代码示例:```c++Eigen::Matrix3d rotation_matrix;Eigen::Quaterniond quaternion;// 将旋转矩阵赋值给rotation_matrix// ...quaternion = Eigen::Quaterniond(rotation_matrix);```下面是四元数到旋转矩阵的转换代码示例:```c++Eigen::Quaterniond quaternion;Eigen::Matrix3d rotation_matrix;// 将四元数赋值给quaternion// ...rotation_matrix = quaternion.toRotationMatrix();```使用Eigen中的旋转矩阵和四元数相互转换函数可以方便地在两个不同的表示形式之间进行转换,从而适应不同的应用需求。

四元数的矩阵表示
有两种方法能以矩阵表示四元数,并以矩阵之加法、乘法应用于四元数之加法、乘法。
第一种是以二阶复数矩阵表示。
若h = a + bi + cj + dk 则它的复数形式为:
这种表示法有如下优点:
所有复数(c = d = 0) 就相应于一个实矩阵。
四元数的绝对值的平方就等于矩阵的行列式。
四元数的共轭值就等于矩阵的共轭转置。
对于单位四元数(|h| = 1)而言,这种表示方式给了四维球体和SU (2)之间的一个同型,而后者对于量子力学中的自旋的研究十分重要。
(请另见泡利矩阵)
第二种则是以四阶实数矩阵表示:
其中四元数的共轭等于矩阵的转置。
eigen 旋转矩阵转四元数四元数(Quaternion)是一种超复杂的根据3维运动的四元组的形式,用来描述物体的三维旋转。
它被广泛应用于机器人控制系统、游戏开发,以及3D图形学中,以表示和操控物体在空间中的运动。
能够极为准确和迅速地表示物体空间描述,这就是四元数强大之处。
旋转矩阵转四元数的过程:1. 求旋转矩阵的角度。
为了把旋转矩阵转换成四元数,首先需要知道旋转的角度。
首先,把旋转矩阵表示成一阶指标表达式,如下:A = [ cos q, sin q, 0;-sin q, cos q, 0;0 , 0, 1;]根据上边的表达式,可以计算出旋转的角度q = arccos((A11 + A22)/2)。
2.计算四元数参数由于四元数,在三维空间上表示旋转的一种工具,因此,要把旋转矩阵变成四元数,必须计算出四元数参数。
根据四元数定义形式可以知道,四元数由4个参数w,x,y,z组成,参数之间的关系根据下面的数学函数来定义:w = cos(q/2),x = (A12 - A21)/(2*sin(q/2)),y = (A13 - A31)/(2*sin(q/2)),z = (A23 - A32)/(2*sin(q/2))3. 用四元数描述旋转有了上边求出的4个参数之后,就可以用四元数表示旋转,如:q = w + x*i + y*j + z*k同时在三维空间中,表示旋转的就是四元数,这样,只要有四元数向量,就可以表示3维物体旋转的任何情况。
总结:四元数是旋转矩阵转化为三维动态描述的高效工具,可以高精度地描述和控制物体自由空间的运动。
通过上述步骤,可以将旋转矩阵转换为四元数。
旋转的矩阵与四元数的转换算法一、基本知识四元数q=w+xi+yj+zk, q=w+v, q 一1=|q|2q-.其中q = w- xi- yj- zk表示q的共轭。
vV =v x v' -v? ........... ①qq'= (ww'-v? v') + (wv' +vw' +v v'), x••… ②v?v' = -(vv' +v'v) /2 , …… ③绕指定方向的轴线的旋转v x v' = (vv' -v'v) /2 . ...... ④2 2 2v =-|v| .内积v?v =|v| .二、旋转表示为四元数绕指定方向n的旋转公式为x'=(x ?n)n(1-cos 0 ) + cos +s®n x0 n x…… ⑤其中的向量运算转化为四元数运算得到x'= -(x n+nx)n( 1-cos 0 )/2+cos x +sin 0n *-x n)/2,由于|n|=1,故n =-n.因此有x'= (1+cos 0 )x/2 +sinnx-0 n)/2 - nxn(1-cos 0 )/2 •/ —⑥x的平行、垂直分量记为x p=(x?n)n , x v= x-x p,则-nxn= x p- X v ,与x关于n轴对称。
(nx-xn)/2= n x履x v 旋转+90° 的结果。
若n丄x, x?n =0,即xn=-nx,此时nxn=x,故x' =(cos 0+sin 0 .q=r(cos 0 +nsin称为四元数的三角式,其中n为单位向量,它的几何意义是,qx表示对向量x绕方向n旋转0角,然后长度扩大为r倍。
任何四元数都有三角式q=w+v= |q|(w/|q|+n|v|/|q|)=r( cos 0 +nsin).0(x)=qxq -1称为四元数域上的合同变换。
四元数转旋转矩阵右手坐标系-概述说明以及解释1.引言概述部分的内容可以写成以下样式:1.1 概述概述部分将简要介绍本文的主题以及研究背景,引起读者的兴趣。
四元数在计算机图形学、机器人学和航天导航等领域中被广泛应用。
它是一种用于表示三维旋转的数学工具,相比于传统的欧拉角,四元数具有更好的数学性质和计算效率。
然而,在实际应用中,我们经常需要将四元数转换为旋转矩阵来表达旋转变换。
右手坐标系是一种常见的坐标系,被广泛应用于计算机图形学、物理学和工程学等领域。
与左手坐标系相比,右手坐标系具有更加直观和自然的性质。
因此,将四元数转换为旋转矩阵时,针对右手坐标系进行推导和分析有着重要的意义。
本文旨在探讨四元数转旋转矩阵在右手坐标系中的应用。
在正文部分,我们将介绍四元数的基本定义和性质,以及右手坐标系的定义和特点。
接着,我们将详细推导四元数转旋转矩阵的原理,并给出相关的数学推导过程。
在结论部分,我们将讨论四元数转旋转矩阵在右手坐标系中的具体应用,并进行结果分析和总结。
通过对四元数转旋转矩阵的研究和分析,我们可以深入理解四元数的几何含义以及其在三维旋转中的应用。
同时,对于研究和开发基于右手坐标系的计算机图形学、机器人学和航天导航系统等领域的人员来说,本文也将提供实用的参考和指导。
1.2文章结构文章结构部分的内容应包括文章的主要章节和各章节的标题。
根据目录中提到的主要章节,可以编写如下内容:1.2 文章结构本文将按照以下章节展开:1. 引言1.1 概述1.2 文章结构1.3 目的2. 正文2.1 四元数的定义和基本性质2.2 右手坐标系的定义和特点2.3 四元数转旋转矩阵的原理及推导3. 结论3.1 四元数转旋转矩阵在右手坐标系中的应用3.2 结果分析与讨论3.3 总结通过以上章节的安排,文章将依次介绍四元数、右手坐标系和四元数转旋转矩阵的相关内容,并最终得出结论和总结。
1.3 目的本文的目的是研究和探讨四元数转旋转矩阵在右手坐标系中的应用。
四元数到矩阵转化
四元数是一种数学工具,可以用来表示旋转和方向,而矩阵则是一种表示空间变换的工具。
在三维计算机图形学中,通常需要将四元数转化为矩阵,以便进行旋转、缩放、平移等变换。
下面介绍一种方法将四元数转化为矩阵:
首先,将四元数表示为一个向量[q0,q1,q2,q3],其中q0为实部,q1、q2、q3为虚部。
然后,可以使用以下公式将四元数转化为矩阵:
[ 1 - 2q2^2 - 2q3^2 2q1q2 - 2q0q3 2q1q3 +
2q0q2 ]
[ 2q1q2 + 2q0q3 1 - 2q1^2 - 2q3^2 2q2q3 -
2q0q1 ]
[ 2q1q3 - 2q0q2 2q2q3 + 2q0q1 1 - 2q1^2 -
2q2^2 ]
其中^表示指数运算,即平方。
这个矩阵可以用来进行旋转变换,将一个向量旋转一定角度并沿某个轴缩放。
当然,也可以使用其他方法将四元数转化为矩阵,但这个方法相对简单,容易理解和实现。
在计算机图形学和游戏中,四元数到矩阵的转化是常见的操作之一,对于对三维空间变换的理解具有重要意义。
- 1 -。
旋转矩阵转换为四元数一、前言旋转矩阵和四元数是计算机图形学中常用的表示旋转的方法,两者之间可以相互转换。
本文将介绍如何将一个旋转矩阵转换为对应的四元数。
二、什么是旋转矩阵和四元数1. 旋转矩阵在三维空间中,一个点可以由三个坐标轴上的分量表示,同样地,一个向量也可以由三个坐标轴上的分量表示。
如果我们想将一个向量绕某个轴旋转一定的角度,我们需要用到一个矩阵来描述这个操作,这个矩阵就叫做旋转矩阵。
在三维空间中,旋转矩阵通常是3x3的正交矩阵(即行列式为1且每一行都彼此垂直),它可以描述任意一个向量绕某个轴旋转一定角度后得到的新向量。
2. 四元数四元数是一种扩展了复数概念的数学对象,它由实部和虚部组成。
在计算机图形学中,我们通常使用单位四元数来表示旋转操作。
单位四元数具有模长为1,并且可以用来描述任意一个向量绕某个轴旋转一定角度后得到的新向量。
三、旋转矩阵转换为四元数1. 原理旋转矩阵可以描述一个向量绕某个轴旋转一定角度后得到的新向量,而四元数也可以描述同样的操作。
因此,我们可以通过求解一个给定的旋转矩阵对应的四元数来实现两者之间的转换。
2. 具体步骤将一个3x3的旋转矩阵表示为:$$R = \begin{bmatrix}r_{11} & r_{12} & r_{13} \\r_{21} & r_{22} & r_{23} \\r_{31} & r_{32} & r_{33}\end{bmatrix}$$根据四元数的定义,我们可以用以下公式将其转换为一个四元数:$$q = w + xi + yj + zk$$其中,$w$表示实部,$x,y,z$表示虚部。
根据上述公式,我们需要求解出四个未知量$w,x,y,z$。
首先,由于单位四元数具有模长为1,因此我们有:$$w^2 + x^2 + y^2 + z^2 = 1$$其次,由于我们已知旋转矩阵$R$,因此我们可以通过以下公式求解出$q$中的各个分量:$$w = \frac{1}{2}\sqrt{1 + r_{11} + r_{22} + r_{33}} \\x = \frac{r_{32} - r_{23}}{4w} \\y = \frac{r_{13} - r_{31}}{4w} \\z = \frac{r_{21} - r_{12}}{4w}$$最后,我们得到了一个四元数$q$,它可以用来描述旋转矩阵$R$所表示的旋转操作。
//公式都是网上搜罗的,下面这些经过简单的测试,确认可用。
//ps: x,y,z,w 分别是四元素的四个值。
稍微修改下就可以用。
// 由旋转矩阵创建四元数
inline CQuaternion(const_Matrix4& m)
{
float tr, s, q[4];
int i, j, k;
int nxt[3] = {1, 2, 0 };
// 计算矩阵轨迹
tr = m._11 + m._22 + m._33;
// 检查矩阵轨迹是正还是负
if(tr>0.0f)
{
s = sqrt(tr + 1.0f);
this->w = s / 2.0f;
s = 0.5f / s;
this->x = (m._23 - m._32) * s;
this->y = (m._31 - m._13) * s;
this->z = (m._12 - m._21) * s;
}
else
{
// 轨迹是负
// 寻找m11 m22 m33中的最大分量
i = 0;
if(m.m[1][1]>m.m[0][0]) i = 1;
if(m.m[2][2]>m.m[i][i]) i = 2;
j = nxt[i];
k = nxt[j];
s = sqrt((m.m[i][i] - (m.m[j][j] + m.m[k][k])) + 1.0f); q[i] = s * 0.5f;
if( s!= 0.0f) s = 0.5f / s;
q[3] = (m.m[j][k] - m.m[k][j]) * s;
q[j] = (m.m[i][j] - m.m[j][i]) * s;
q[k] = (m.m[i][k] - m.m[k][i]) * s;
this->x = q[0];
this->y = q[1];
this->z = q[2];
this->w = q[3];
}
};
// 由欧拉角创建四元数
inline CQuaternion(const_Vector3& angle)
{
float cx = cos(angle.x/2);
float sx = sin(angle.x/2);
float cy = cos(angle.y/2);
float sy = sin(angle.y/2);
float cz = cos(angle.z/2);
float sz = sin(angle.z/2);
this->w = cx*cy*cz + sx*sy*sz;
this->x = sx*cy*cz - cx*sy*sz;
this->y = cx*sy*cz + sx*cy*sz;
this->z = cx*cy*sz - sx*sy*cz;
};
// 给定角度和轴创建四元数
inline CQuaternion(_Vector3 anxi, const float& angle) {
CVector3 t;
t.x = anxi.x;
t.y = anxi.y;
t.z = anxi.z;
t.Normalize();
float cosa = cos(angle);
float sina = sin(angle);
this->w = cosa;
this->x = sina * t.x;
this->y = sina * t.y;
this->z = sina * t.z;
};
// 由旋转四元数推导出矩阵
inline CMatrix4 GetMatrixLH()
{
CMatrix4 ret;
float xx = x*x;
float yy = y*y;
float zz = z*z;
float xy = x*y;
float wz = w*z;
float wy = w*y;
float xz = x*z;
float yz = y*z;
float wx = w*x;
ret._11 = 1.0f-2*(yy+zz);
ret._12 = 2*(xy-wz);
ret._13 = 2*(wy+xz);
ret._14 = 0.0f;
ret._21 = 2*(xy+wz);
ret._22 = 1.0f-2*(xx+zz);
ret._23 = 2*(yz-wx);
ret._24 = 0.0f;
ret._31 = 2*(xy-wy);
ret._32 = 2*(yz+wx);
ret._33 = 1.0f-2*(xx+yy);
ret._34 = 0.0f;
ret._41 = 0.0f;
ret._42 = 0.0f;
ret._43 = 0.0f;
ret._44 = 1.0f;
return ret;
};
inline CMatrix4 GetMatrixRH() {
CMatrix4 ret;
float xx = x*x;
float yy = y*y;
float zz = z*z;
float xy = x*y;
float wz = -w*z;
float wy = -w*y;
float xz = x*z;
float yz = y*z;
float wx = -w*x;
ret._11 = 1.0f-2*(yy+zz);
ret._12 = 2*(xy-wz);
ret._13 = 2*(wy+xz);
ret._14 = 0.0f;
ret._21 = 2*(xy+wz);
ret._22 = 1.0f-2*(xx+zz);
ret._23 = 2*(yz-wx);
ret._24 = 0.0f;
ret._31 = 2*(xy-wy);
ret._32 = 2*(yz+wx);
ret._33 = 1.0f-2*(xx+yy);
ret._34 = 0.0f;
ret._41 = 0.0f;
ret._42 = 0.0f;
ret._43 = 0.0f;
ret._44 = 1.0f;
return ret;
};
// 由四元数返回欧拉角(主要是这个dx api里没有提供)
inline CVector3 GetEulerAngle()
{
CVector3 ret;
float test = y*z + x*w;
if(test > 0.4999f)
{
ret.z = 2.0f * atan2(y, w);
ret.y = PIOver2;
ret.x = 0.0f;
return ret;
}
if(test < -0.4999f)
{
ret.z = 2.0f * atan2(y, w);
ret.y = -PIOver2;
ret.x = 0.0f;
return ret;
}
float sqx = x * x;
float sqy = y * y;
float sqz = z * z;
ret.z = atan2(2.0f * z * w - 2.0f * y * x, 1.0f - 2.0f * sqz - 2.0f * sqx);
ret.y = asin(2.0f * test);
ret.x = atan2(2.0f * y * w - 2.0f * z * x, 1.0f - 2.0f * sqy - 2.0f * sqx);
return ret;
};。