- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 u v xy y x 2 xy xy
物理方程
E y 2 x 1 E x x 2 y 1 E xy xy 2 1
x
E称为杨氏模量反映材料对于拉伸或压缩 变形的抵抗能力。
2.3弹性力学基本变量
每一个面上的应力分解为一个 正应力和两个剪应力
正应力σ
x y z
xy xz zy yx zx yz
剪应力τ
正应力下标表示作用在垂直于轴的面上同时也沿着轴方向作用的 剪应力加上两个角码,前一个角码表明作用面垂直于哪一个坐标轴,后一个 角码表明作用方向沿着哪一个坐标轴。
应力分量的矩阵表示称为应力列阵或应力向量。
x y z x xy yz zx
y z xy yz zx
弹性体在载荷作用下,将产生位移和变形,即弹性体位置 的移动和形状的改变。弹性体内任一点的位移可由沿直角坐标 轴方向的3个位移分量 , , 来表示。它的矩阵形式是:
x
x
y
y
xy
x y
变形协调条件
它的物理意义是:材料 在变形过程中应该是整 体连续的,不应该出现 “撕裂”和“重叠”现 象发生。
2 2 x y 3u 3v 2 2 2 y x xy yx 2
体所有各点的位移都远小于物体的原有尺寸,因而应变和转角都 远小于1,这样,在考虑物体变形以后的平衡状态时,可以用变形 前的尺寸来代替变形后的尺寸,而不致有显著的误差;并且,在 考虑物体的变形时,应变和转角的平方项或乘积项都可以略去不 计,这就使得弹性力学中的微分方程都成为线性方程。
2.3弹性力学基本变量
U
称作位移列阵或位移向量。
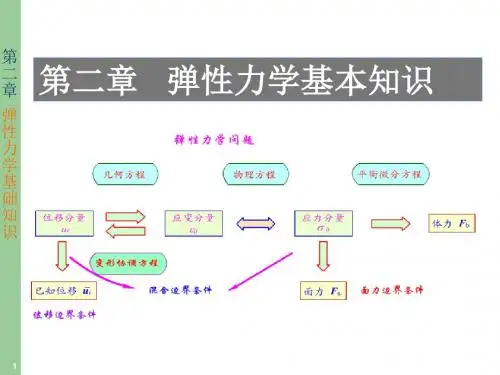
基本方程
受外部作用的任意形状变形体,在其微小体元dxdydz中, 基于位移、应变和应力这三大类变量,可以建立以下三
大类方程
平衡方程:外力和内力之间的平衡关系 几何方程:描述的是位移和应变之间关系 物理方程:应力和应变之间的关系
o
位移
刚体 位移
应变 位移
刚体 转动
strain-displacement relations.(几何方程 柯西方程)
u v w x , y , z x y z u v v w w u xy , yz , zx y x z y x z
2.4平面问题的基本力学方程
平衡方程:外力和内力之间的平衡关系
几何方程:描述的是位移和应变之间关系 物理方程:应力和应变之间的关系 边界条件:
平面(二维)平衡方程
平面问题的静力学平衡,设微小正六面体,在X,Y方向的尺寸dx,dy,Z方向的尺 寸取一个单位长度.
MC 0
弹性问题中的能量表示
平面应力、平面应变、刚体位移的特征及表达 应力及应变的分解
2.1弹性力学同有限元分析的关系
弹性力学:弹性力学也称弹性理论,主要研究弹性体在 外力作用或温度变化等外界因素下所产生的应力、应变 和位移,从而解决结构或机械设计中所提出的强度和刚 度问题。 是固体力学的重要分支,它研究弹性物体在外力和其它 外界因素作用下产生的变形和内力。 研究对象:包括杆状构件在内的各种形状的弹性体。 弹性力学基本规律:变形连续规律、应力-应变关系和 运动(或平衡)规律,它们有时被称为弹性力学三大基本 规律。弹性力学中许多定理、公式和结论等,都可以从 三大基本规律推导出来。
2.3弹性力学基本变量
内力:应力 --外力(或温度)的作用 内力
设作用于 A 上的内力为 Q , 则内力的平均集度,即平均应 力 ,为 Q / A Q lim S A 0 A
这个极限矢量S,就是物体在截面 mn上、P点的应力。
应力就是弹性体内某一点作用于某截面单位面积上的内力
S
混合边界问题:既有Su 边界,又有应力边界。二者可以分 别在边界表面不同的区域上,或同一区域不同的方向上。
几何边界条件
在S上弹性体的位移已知为 , , 即有:
上式两边除dxdy,可得:
同理
x yx fx 0 x y y xy fy 0 y x
平面(二维)几何方程
经过弹性体内任一点P,沿X轴和Y轴的方向取两个微小长度的线段 PA=dx,PB=dy见图
tan tan
u v dy dx u v y x xy u v y x dx dx dy dy x y
基本变量
2.3弹性力学基本变量
外力:指其他物体对研究对象(弹性体)的 作用力。可以分为体积力和表面力 1、表面力:是分布于物体表面的力,如静 水压力,一物体与另一物体之间的接触压力 等。 2、体力:是分布于物体体积内的外力,如 重力、磁力、惯性力等。 均为矢量。 弹性体受外力以后,其内部将产生应力(内力)
2.2 弹性力学中关于材料性质的假定
连续性:亦即物体整个体积内部被组成这种物体的介质填满,
不留任何空隙。这样,物体内的一些物理量,如应力、应变、位 移等等才可以用座标的连续函数来表示。
完全弹性:亦即当使物体产生变形的外力被除去以后,物体
能够完全恢复原形,而不留任何残余变形。这样,当温度不变时, 物 体在任一瞬时的形状完全决定于它在这一瞬时所受的外力 ,与 它过去的受力情况无关。服从虎克定律(应力应变成比例)
1
其中:设想直杆横截面是正方形每边长为 b0 ,横向形变后为 b。 横向形变和纵向形变之比为泊松系数:
1
边界条件
按照边界情况,弹性力学问题一般分为三类:
位移边界问题:在边界面上全部给定位移,即全部是 Su 边界 应力边界问题:在边界面上全部给定表面力,即全部是应力
S 边界。这时,外力(包括体力和面力)应是平衡力系。
一般而论, 弹性体内任意一点的体力分量、面力分 量、应力分量、应变分量和位移分量,都是随着该点的 位置而变的, 因而都是位置坐标的函数。
u u ( x, y , z ) v v ( x, y , z ) w w( x, y, z )
2.3弹性力学基本变量
位移与应变的关系
ui ui ij dx j wij dx j
均匀性:也就是说整个物体是由同一种材料组成的。这样,
整个物体的所有各部分才具有相同的物理性质,因而物体的弹性 常 数(弹性模量和泊松系数)才不随位置座标而变。
2.2 弹性力学中关于材料性质的假定
各向同性:也就是说物体内每一点各个不同方向的物理性质
和机械性质都是相同的。
物体的变形是微小的:亦即当物体受力以后,整个物
2.3弹性力学基本变量
正应变——各线段的每单位长 度的伸缩,即单位伸缩或相对 伸缩。以伸长为正、缩短为负
x y z
剪应变——各线段之间的直角 的改变,用弧度表示。以直角 减小为正、增大为负。
xy yz zx
2.3弹性力学基本变量
位移——就是位置的移动。
物体内任意一点的位移,用它在x, y, z三轴上的 w 来表示以正标向为正。 投影 u ,v ,
本章主要内容
2.1弹性力学同有限元分析的关系
2.2弹性体的基本假设 2.3弹性力学的基本变量
2.4平面问题的基本力学方程
2.5空间问题的基本力学方程 2.6弹性问题中的能量表达 2.7两大类平面问题
本章要点
变形体的三大类基本变量 变形体的三大类基本方程及两类边界条件
两个对面存在微小差量,通过中心点C,平行与Z轴的直线为轴,列出平衡方程 M c 0
xy yx dx dx dy dy dx dy 1 dy 1 dx 1 dx 1 0 xy xy yx yx x 2 2 y 2 2
2.1弹性力学同有限元分析的关系
弹性力学同材料力学的比较 3、研究的方法:
相同点:静力学、几何学与物理学三方面进行研究; 不同点:材料力学: 对构件的整个截面建立分析方程,引用一些截面的变形状况 或应力情况的假设,因而得出的结果往往是近似的,不精确。 弹性力学: 对构件采用无限小单元体来建立分析方程的,因而无须引用 那些假设,分析的方法比较严密,得出的结论也比较精确。所以, 可以用弹性力学的解答来估计材料力学解答的精确程度,并确定 它们的适用范围。
上式两边除dxdy,可得:
xy yx
以X轴为投影轴,满足平衡方程:
剪力互等关系
F 0
yx x dx dy 1 dy 1 dy dx 1 yx dx 1 f x dxdy 1 0 x x yx x y
2.1弹性力学同有限元分析的关系
从几何形状复杂程度来考虑可以分为:
1)简单形状变形体—材料力学 2)任意形状变形体—弹性力学 任意变形体是有限元方法处理的对象,因而,弹性力 学中有关变量和方程的描述是有限元方法的重要基础。 弹性力学的弱点:由于研究对象的变形状态较复杂, 处理的方法又较严谨,因而解算问题时,往往需要冗长 的数学运算。但为了简化计算,便于数学处理,它仍然 保留了材料力学中关于材料性质的假定。
是泊松系数,描写材料横向收缩或膨胀 的特性。
写成矩阵形式为
D
线应变(相对伸长或压缩) 绝对伸长(或压缩)与原长之比称为相对伸长(或 压缩)。公式: l
当
0 时,为压缩形变,因而, 0 时,为拉伸形变;
b b0 b b0 b0
l0
它很好地反映形变程度。如直杆拉伸压缩时,还产生横 向形变,则对应的应变(或形变)为: