模块驱动实验指导
- 格式:doc
- 大小:231.00 KB
- 文档页数:21
实验一驱动控制实验一实验名称驱动控制实验二实验目的(1)学习小车驱动控制的硬件、软件设计;(2)能够完成对其硬件系统各模块的测试,对软件系统的调试及使用;(3)通过对上位机的操作,完成对小车的动作控制;三实验内容3。
1 实验原理上位机以无线方式对小车动作进行控制。
小车动作包括小车的左转、右转、停止、往前走、往后走、开火、炮台左转、炮台右转和炮台停止.设计小车驱动控制系统,并进行系统调试。
通过设计驱动控制程序,在接受PC机无线指令下完成小车前进、后退、转弯、开火、生命值显示、调速和自动行驶等功能,并将其嵌入到车辆综合对抗演示系统中,使车辆按照设计的控制方法进行对抗演练,完成设计的工程化和实用化研究.3。
2硬件组成及说明:本系统由MCU模块、电机驱动模块、红外打击模块、模块(接受、发射)、LED生命值显示模块、超声测距模块、光电传感器模块、语音模块、无线模块以及电源模块组成。
最终在PC的控制下完成前进、后退、转弯、开火、生命值显示、调速和自动行驶等功能.(1)MCU模块:由一片atmega128主控制器和一片atmega8辅助控制器及其外围电路组成,是坦克驱动部分整个系统的控制核心。
Atmega128单片机是一款高性能、低功耗的A VR 8位微处理器,处理速度可达1MIPS/MHz,应用先进的RISC结构,特别是具有I2C、SPI、PWM、RS232串口、ADC、定时器等功能十分全面的外设.(2)电机驱动系统:单路电极驱动模块由一片L9110及其外围电路组成,用于驱动直流电机。
L298P是SGS公司的产品,为20管脚的专用电机驱动芯片,内含二个H—Bridge 的高电压、大电流双全桥式驱动器,接收标准TTL逻辑准位信号,可驱动46V、2A以下的步进电机和直流电机,具有高电压、高电流的特点。
整个战车的电极驱动系统由三路单路电极驱动模块组成.(3)红外打击系统:接受模块由一个红外接收管构成,接受对方车辆发射的红外攻击信号.发射模块由一只红外发射管及红外编码驱动芯片组成,发射红外攻击信号。
内核驱动设计入门-模块方式驱动实验一、实验目的➢学习在LINUX下进行驱动设计的原理➢掌握使用模块方式进行驱动开发调试的过程二、实验内容在PC机上编写简单的虚拟硬件驱动程序并进行调试,实验驱动的各个接口函数的实现,分析并理解驱动与应用程序的交互过程。
三、预备知识➢有C语言基础。
➢掌握在Linux下常用编辑器的使用。
➢掌握Makefile 的编写和使用。
➢掌握Linux下的程序编译与交叉编译过程。
➢有驱动开发的基本知识。
四、实验设备及工具硬件:PC机Pentium500以上, 硬盘40G以上,内存大于128M。
软件:PC机操作系统REDHAT LINUX 9.0 +MINICOM +AMR-LINUX开发环境五、实验原理Linux中的驱动设计是嵌入式Linux开发中十分重要的部分,它要求开发者不仅要熟悉Linux 的内核机制、驱动程序与用户级应用程序的接口关系、考虑系统中对设备的并发操作等等,而且还要非常熟悉所开发硬件的工作原理。
这对驱动开发者提出了比较高的要求,这个实验主要是给大家进入驱动设计提供一个简单入门的一个实例,并不需要提供太多与硬件相关的内容,这部分应该是通过仔细阅读芯片厂家提供的资料来解决。
驱动程序的作用是应用程序与硬件之间的一个中间软件层,驱动程序应该为应用程序展现硬件的所有功能,不应该强加其他的约束,对于硬件使用的权限和限制应该由应用程序层控制。
但是有时驱动程序的设计是跟所开发的项目相关的,这时就可能在驱动层加入一些与应用相关的设计考虑,主要是因为在驱动层的效率比应用层高,同时为了项目的需要可能只强化或优化硬件的某个功能,而弱化或关闭其他一些功能;到底需要展现硬件的哪些功能全都由开发者根据需要而定。
驱动程序有时会被多个进程同时使用,这时我们要考虑如何处理并发的问题,就需要调用一些内核的函数使用互斥量和锁等机制。
驱动程序主要需要考虑下面三个方面:提供尽量多的选项给用户,提高驱动程序的速度和效率,尽量使驱动程序简单,使之易于维护。

一、实验目的1. 理解模块控制的基本原理和概念。
2. 掌握模块控制系统的搭建方法。
3. 学习模块控制在实际应用中的调试与优化。
二、实验原理模块控制是指将复杂的控制系统分解成若干个功能独立的模块,每个模块负责控制系统中的一部分功能。
通过模块之间的协同工作,实现对整个系统的有效控制。
模块控制具有以下优点:1. 结构清晰,易于理解和维护。
2. 模块化设计,便于扩展和升级。
3. 提高系统的可靠性和稳定性。
三、实验设备与材料1. 模块控制器:如Arduino、STM32等。
2. 执行模块:如电机驱动器、继电器、传感器等。
3. 电源模块:如稳压电源、电池等。
4. 连接线:如杜邦线、电源线等。
5. 仿真软件:如Keil、Proteus等。
四、实验步骤1. 搭建模块控制系统(1)根据实验需求,确定所需模块和控制策略。
(2)将模块控制器连接到执行模块、传感器等,搭建硬件电路。
(3)在仿真软件中绘制电路图,进行仿真调试。
2. 编写控制程序(1)根据模块功能,编写控制程序。
(2)利用模块控制器提供的编程接口,编写控制算法。
(3)在仿真软件中调试程序,验证程序功能。
3. 硬件调试与优化(1)根据仿真结果,对硬件电路进行调整。
(2)检查模块之间的连接是否牢固,电源是否稳定。
(3)优化控制策略,提高系统性能。
五、实验内容1. 模块控制系统搭建(1)以Arduino为例,搭建一个简单的模块控制系统。
(2)连接电机驱动器、传感器等模块。
(3)编写程序,实现电机正反转、传感器数据采集等功能。
2. PID控制实验(1)以PID算法为例,实现对电机转速的精确控制。
(2)编写PID控制程序,设置PID参数。
(3)在仿真软件中调试程序,观察电机转速曲线。
3. 模块控制应用(1)以智能家居为例,搭建一个基于模块控制的灯光控制系统。
(2)连接传感器、继电器等模块。
(3)编写程序,实现灯光的自动开关、定时控制等功能。
六、实验结果与分析1. 模块控制系统搭建实验结果表明,搭建的模块控制系统结构清晰,功能稳定。
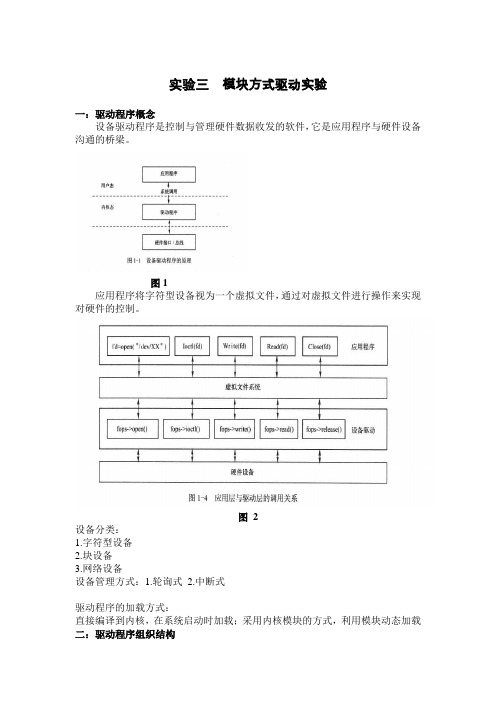
实验三模块方式驱动实验一:驱动程序概念设备驱动程序是控制与管理硬件数据收发的软件,它是应用程序与硬件设备沟通的桥梁。
图1应用程序将字符型设备视为一个虚拟文件,通过对虚拟文件进行操作来实现对硬件的控制。
图 2设备分类:1.字符型设备2.块设备3.网络设备设备管理方式:1.轮询式 2.中断式驱动程序的加载方式:直接编译到内核,在系统启动时加载;采用内核模块的方式,利用模块动态加载二:驱动程序组织结构驱动程序是一组函数的集合。
这些函数的目的是为管理设备实现的一个简单接口。
图 3说明:设备驱动程序被设计为看起来与文件系统的接口相同,定义了一组固定的操作(函数)集合。
每个设备驱动程序需建立struct file_operation结构的实例。
并由开发人员实现操作设备的相关函数。
三:设备注册该表中包含255个元素,每一个元素对应一个可能的主设备号所有的字符设备信息都需存储在chrdevs表中。
device_struct数据结构来描述具有相同主设备号的设备信息,该结构定义于fs/devices.c图 4其中,name是某类设备的名字,fops是指向文件操作表的一个指针。
核思故备在一:设备驱动程序模块加载二:内核为系统的每个设备建立一个特殊文件。
特殊文件是/dev目录中对应这个设备的一个项。
图5通过mknod命令实现mknod /dev/<dev_name><type><major_num><minor_num>mknod命令注:<dev_name>参数是特殊文件的文件名<type>参数,字符设备为c,块设备为b<major_num> 主码:定义驱动程序的类别如:软盘的主码2IDE硬盘的主码为3四:可装载内核模块驱动程序实现驱动程序接口声明(建立struct file_operation结构的实例)图 6字符设备的读写:从应用程序看来,字符设备只是一个设备文件,应用程序可以像操作普通文件一样来对设备进行操作。
实验一:内核模块/* 建立实验目录添加hello.c*/#include <linux/module.h> /* Needed by all modules */#include <linux/kernel.h> /* Needed for KERN_ALERT */#include <linux/init.h>static int __init test_init(void){printk("Hello world 1.\n");return 0;}static void __exit test_exit(){printk("Goodbye world 1.\n");}module_init(test_init);module_exit(test_exit);/* 在实验目录添加Makefile*/obj-m += hello.oPWD := $(shell pwd)#PC机内核模块使用以下两行进行内核代码路径指定(根据需要打开#注释)#KERN_VER = $(shell uname -r)#KERN_DIR = /lib/modules/$(KERN_VER)/build#ARM内核模块使用以下进行内核代码路径指定(根据需要打开#注释)#KERN_DIR = /root/build_kernel/linux-2.6.30.4modules:$(MAKE) -C $(KERN_DIR) M=$(PWD) modulesclean:rm –rf *.o *~ core .depend . *.cmd *.ko *.mod.c .tmp_versions编译生成的内核模块可以直接加载:insmod hello.ko卸载模块:rmmod hello.ko可以通过参看系统内核日志信息来查看模块的加载与卸载情况。
tail /var/log/messages实验二:改造Hello模块,注册字符设备(使用老方法)#include <linux/module.h> /* Needed by all modules */#include <linux/kernel.h> /* Needed for KERN_ALERT */#include <linux/init.h>/*添加文件操作接口有关的头文件*/#include <linux/fs.h>#include <asm/uaccess.h>//第一步:定义设备号及设备名#define TEST_MAJOR 233 //定义主设备号static char drv_name[] = "test"; //定义主设备名//第二步:添加设备驱动操作接口函数open和release,这两个函数在应用程序调用open 及close时调用。
控制器模块介绍太阳能控制器:(1)功能:蓄电池过充、过放电保护;蓄电池开路保护、防反充电保护、太阳能电池反接保护、蓄电池反接保护、MPPT(Maximum Power Point Tracking,最大功率点跟踪)实验;(2)参数:控制器保险丝Fuse1规格为5A。
蓄电池过放电压11V蓄电池过充电压15V太阳能电池板光控输出开断电压9V(3)输出模式1)普通:除蓄电池过放情况外开启输出。
2)光控:当光强变弱太阳能电池板输出电压小于9V,并且蓄电池不过放时开启输出,其它情况一律断开输出。
3)时控:除蓄电池过放情况外开启输出,有4种输出时长:时长1(1分钟),时长2(5分钟),时长3(10分钟),时长4(30分钟)。
(4)LED状态指示:电池电量指示灯工作(25%,50%,75%,100%)。
LED1:普通输出模式指示灯LED5:时长4设置为30分钟(时控下工作)LED2:光控输出模式指示灯LED8:+5V电源运行指示LED3:时控输出模式指示灯LED9:电池板输出欠压指示LED4:输出指示灯LED10:蓄电池过放指示LED16:时长1设置为1分钟(时控下工作)LED11:蓄电池过充指示LED7:时长2设置为5分钟(时控下工作)LED12:蓄电池充电指示LED6:时长3设置为10分钟(时控下工作)LED17:电池板反接指示(5)液晶显示:主要显示太阳能电池板,蓄电池的电流、电压参数。
控制器各单元电路如下:(1)反接保护电路:太阳能电池板反接后,反接指示会亮,无输出。
正常连接时输出正常。
(2)DC变换电路:将太阳能电池板的输出电压降低到一个合理的范围内,给12V的蓄电池充电,电池板的输出电压最大不能超过20V,本太阳能平台配备的电池板输出最大为21V,所以基本不需要使用到降压电路,如果在实验中,使用到输出电压比较大的电池板给蓄电池充电前,需要使用到降压电路对电池板输出电压进行降压。
(3)DC-DC电路:单片机产生PWM波形,PWM控制MOS管给蓄电池充电。
电机驱动模块课程设计一、课程目标知识目标:1. 理解电机驱动模块的基本原理,掌握电机种类、结构及其工作特性;2. 掌握电机驱动电路的设计方法,了解驱动模块的参数设置与调整;3. 了解电机转速、转向的控制原理,能够运用相关公式进行计算。
技能目标:1. 能够正确选择合适的电机驱动模块,并进行基本的电路连接与调试;2. 学会使用相关软件对电机驱动模块进行编程与控制,实现电机的启动、停止、转速调节等功能;3. 培养实际操作与动手能力,能够解决电机驱动模块在实际应用中遇到的问题。
情感态度价值观目标:1. 培养学生对电机驱动模块的兴趣,激发学习热情,形成积极探索的学习态度;2. 培养学生的团队合作意识,学会在小组合作中共同解决问题,互相学习,共同进步;3. 增强学生的环保意识,了解电机驱动模块在节能减排方面的意义,提高社会责任感。
课程性质:本课程为电机驱动模块的实践应用课程,注重理论联系实际,强调学生的动手操作能力和实际应用能力的培养。
学生特点:学生具备基本的电子电路知识,具有一定的编程基础,对电机驱动模块有一定了解,但对实际应用和动手操作经验有限。
教学要求:教师需结合学生特点和课程性质,采用讲授、实践、讨论等多种教学方式,引导学生主动参与,注重培养学生的实际操作能力和解决问题的能力。
通过课程学习,使学生能够将所学知识应用于实际项目中,提高综合运用能力。
二、教学内容1. 电机原理与种类:介绍直流电机、步进电机、伺服电机等常见电机的结构、原理及特性,结合教材第二章内容,让学生了解电机的基本知识。
2. 电机驱动电路设计:讲解电机驱动电路的基本组成、功能及设计方法,结合教材第三章内容,学习驱动模块的选型、参数设置与调整。
3. 电机控制编程:学习电机控制的基本编程方法,包括启动、停止、转速调节等,结合教材第四章内容,掌握相关编程技巧。
4. 电机驱动模块应用实例:分析实际应用案例,如智能车、机器人等,结合教材第五章内容,让学生了解电机驱动模块在不同场景的应用。
驱动实验报告模板范文实验目的本实验的目的是通过编写驱动程序来控制设备并实现特定功能。
通过这个实验,我将学习驱动程序的开发流程和基本原理,并且掌握如何使用驱动程序与设备进行交互。
实验环境和工具- 操作系统:Windows 10- 开发工具:Visual Studio 2019- 设备:测试设备A实验内容设计驱动程序首先,我根据实验要求,设计了一个简单的驱动程序。
这个程序的主要功能是控制设备A的开关状态。
在设备A的驱动程序中,我定义了一些函数来实现设备的初始化和控制,例如`InitDevice()`和`ControlDevice()`函数。
同时,我还添加了与设备A交互的数据结构和变量。
编写驱动程序接下来,我使用Visual Studio 2019进行驱动程序的编写。
在新建的项目中,我选择了驱动开发模板,并添加了设备A的驱动程序文件。
在驱动开发过程中,我主要使用了Windows Driver Kit中提供的API函数来实现设备的初始化和控制。
通过仔细阅读API文档以及相关示例代码,我成功地编写出了一个功能完善的驱动程序。
编译和调试驱动程序完成驱动程序的编写后,我使用Visual Studio 2019进行了编译和调试。
在编译阶段,我检查了代码是否符合语法,并解决了一些潜在的错误。
然后,我选择了虚拟机作为调试环境,并配置好了相应的调试设置。
通过在调试过程中设置断点和观察变量的值,我成功地找到并解决了一些与设备交互的问题。
最后,我进行了一系列的功能测试,并对程序进行了性能优化。
通过与设备A的交互,我确认了驱动程序的功能正常,并且能够按照预期的方式控制设备A的开关状态。
实验结果和分析通过本次实验,我成功地完成了一个驱动程序的设计和开发,并且实现了设备A 的控制功能。
经过测试,这个驱动程序能够稳定地工作,并且在性能方面也能满足实际需求。
然而,在开发过程中,我也遇到了一些问题。
例如,在与设备A进行通信时,我发现了一些边界情况的处理不完善的问题。
内核驱动设计入门-模块方式驱动实验一、实验目的学习在LINUX下进行驱动设计的原理掌握使用模块方式进行驱动开发调试的过程二、实验内容在PC机上编写简单的虚拟硬件驱动程序并进行调试,实验驱动的各个接口函数的实现,分析并理解驱动与应用程序的交互过程。
三、预备知识有C语言基础。
掌握在Linux下常用编辑器的使用。
掌握Makefile 的编写和使用。
掌握Linux下的程序编译与交叉编译过程。
有驱动开发的基本知识。
四、实验设备及工具硬件:PC机Pentium500以上, 硬盘40G以上,内存大于128M。
软件:PC机操作系统REDHAT LINUX 9.0 +MINICOM +AMR-LINUX开发环境五、实验原理Linux中的驱动设计是嵌入式Linux开发中十分重要的部分,它要求开发者不仅要熟悉Linux 的内核机制、驱动程序与用户级应用程序的接口关系、考虑系统中对设备的并发操作等等,而且还要非常熟悉所开发硬件的工作原理。
这对驱动开发者提出了比较高的要求,这个实验主要是给大家进入驱动设计提供一个简单入门的一个实例,并不需要提供太多与硬件相关的内容,这部分应该是通过仔细阅读芯片厂家提供的资料来解决。
驱动程序的作用是应用程序与硬件之间的一个中间软件层,驱动程序应该为应用程序展现硬件的所有功能,不应该强加其他的约束,对于硬件使用的权限和限制应该由应用程序层控制。
但是有时驱动程序的设计是跟所开发的项目相关的,这时就可能在驱动层加入一些与应用相关的设计考虑,主要是因为在驱动层的效率比应用层高,同时为了项目的需要可能只强化或优化硬件的某个功能,而弱化或关闭其他一些功能;到底需要展现硬件的哪些功能全都由开发者根据需要而定。
驱动程序有时会被多个进程同时使用,这时我们要考虑如何处理并发的问题,就需要调用一些内核的函数使用互斥量和锁等机制。
驱动程序主要需要考虑下面三个方面:提供尽量多的选项给用户,提高驱动程序的速度和效率,尽量使驱动程序简单,使之易于维护。
Linux的驱动开发调试有两种方法,一种是直接编译到内核,再运行新的内核来测试;二是编译为模块的形式,单独加载运行调试。
第一种方法效率较低,但在某些场合是唯一的方法。
模块方式调试效率很高,它使用insmod工具将编译的模块直接插入内核,如果出现故障,可以使用rmmod从内核中卸载模块。
不需要重新启动内核,这使驱动调试效率大大提高。
我们的实验在PC机和UP-NETARM2410-S上都可以运行,编译时使用不同的编译器就可以了。
1.驱动程序与应用程序的区别应用程序一般有一个main函数,从头到尾执行一个任务;驱动程序却不同,它没有main函数,通过使用宏module_init(初始化函数名); 将初始化函数加入内核全局初始化函数列表中,在内核初始化时执行驱动的初始化函数,从而完成驱动的初始化和注册,之后驱动便停止等待被应用软件调用。
驱动程序中有一个宏moudule_exit(退出处理函数名)注册退出处理函数。
它在驱动退出时被调用。
应用程序可以和GLIBC库连接,因此可以包含标准的头文件,比如<stdio.h> <stdlib.h>,在驱动程序中是不能使用标准C库的,因此不能调用所有的C库函数,比如输出打印函数只能使用内核的printk函数,包含的头文件只能是内核的头文件,比如<linux/module.h>。
2.内核版本与编译器的版本依赖当模块与内核链接时,insmod会检查模块和当前内核版本是否匹配,每个模块都定义了版本符号__module_kernel_version,这个符号位于模块文件的ELF头的.modinfo段中。
只要在模块中包含<linux/module.h>,编译器就会自动定义这个符号。
每个内核版本都需要特定版本的编译器的支持,高版本的编译器并不适合低版本的内核,比如UP-NETARM2410-S实验仪中的LINUX-2.4.19的内核需要2.95.3的GCC版本编译器。
Linux-2.4版本的insmod 命令装载模块时,首先从/lib/modules目录和内核相关的子目录中查找模块文件,如果需要从当前目录装载,使用insmod module.o。
3.主设备号和次设备号传统方式中的设备管理中,除了设备类型外,内核还需要一对称作主次设备号的参数,才能唯一标识一个设备。
主设备号相同的设备使用相同的驱动程序,次设备号用于区分具体设备的实例。
比如PC机中的IDE设备,一般主设备号使用3,WINDOWS下进行的分区,一般将主分区的次设备号为1,扩展分区的次设备号为2、3、4,逻辑分区使用5、6….。
设备操作宏MAJOR()和MINOR()可分别用于获取主次设备号,宏MKDEV()用于将主设备号和次设备号合并为设备号,这些宏定义在include/linux/kdev_t.h中。
对于LINUX中对设备号的分配原则可以参考Documentation/devices.txt。
对于查看/dev目录下的设备的主次设备号可以使用如下命令:4.设备文件设备类型、主次设备号是内核与设备驱动程序通信时所使用的,但是对于开发应用程序的用户来说比较难于理解和记忆,所以Linux使用了设备文件的概念来统一对设备的访问接口,在引入设备文件系统(devfs)之前Linux将设备文件放在/dev目录下,设备的命名一般为设备文件名+数字或字母表示的子类,例如/dev/hda1、/dev/hda2等。
在Linux-2.4内核中引入了设备文件系统(devfs),所有的设备文件作为一个可以挂装的文件系统,这样就可以被文件系统进行统一管理,从而设备文件就可以挂装到任何需要的地方。
命名规则也发生了变化,一般将主设备建立一个目录,再将具体的子设备文件建立在此目录下。
比如在UP-NETARM2410-S中的MTD 设备为:/dev/mtdblock/0。
5.设备驱动程序接口通常所说的设备驱动程序接口是指结构file_operations{},它定义在include/linux/fs.h 中。
file_operations数据结构说明file_operations结构是整个Linux内核的重要数据结构,它也是file{}、inode{}结构的重要成员,表5.1.1中分别说明结构中主要的成员:表5.1.1 file_operations结构在嵌入式系统的开发中,我们一般仅仅实现其中几个接口函数:read、write、ioctl、open、release,就可以完成应用系统需要的功能。
6.file 数据结构说明file结构中与驱动相关的重要成员说明我们将struct file 结构指针定义为flip,以便于下面说明。
表5.1.2 file结构中与驱动相关的成员7.驱动接口的实现过程我们先看看实验代码框架其中,static struct file_operations demo_fops = {…}完成了将驱动函数映射为标准接口,devfs_registe()和register_chrdev()函数完成将驱动向内核注册。
上面的这种特殊表示方法不是标准C的语法,这是GNU编译器的一种特殊扩展,它使用名字对进行结构字段的初始化,它的好处体现在结构清晰,易于理解,并且避免了结构发生变化带来的许多问题。
Open方法Open方法提供给驱动程序初始化设备的能力,从而为以后的设备操作做好准备,此外open 操作一般还会递增使用计数,用以防止文件关闭前模块被卸载出内核。
在大多数驱动程序中Open方法应完成如下工作:1.递增使用计数2.检查特定设备错误。
3.如果设备是首次打开,则对其进行初始化。
4.识别次设备号,如有必要修改f_op指针。
5.分配并填写filp->private_data中的数据。
Release方法与open方法相反,release 方法应完成如下功能:1.释放由open分配的filp->private_data中的所有内容2.在最后一次关闭操作时关闭设备3.使用计数减一read 方法完成将数据从内核拷贝到应用程序空间,write方法相反,将数据从应用程序空间拷贝到内核。
对于者两个方法,参数filp是文件指针,count是请求传输数据的长度,buffer是用户空间的数据缓冲区,ppos是文件中进行操作的偏移量,类型为64位数。
由于用户空间和内核空间的内存映射方式完全不同,所以不能使用象memcpy之类的函数,必须使用如下函数:1.返回值等于传递给read系统调用的count参数,表明请求的数据传输成功。
2.返回值大于0,但小于传递给read系统调用的count参数,表明部分数据传输成功,根据设备的不同,导致这个问题的原因也不同,一般采取再次读取的方法。
3.返回值=0,表示到达文件的末尾。
4.返回值为负数,表示出现错误,并且指明是何种错误。
5.在阻塞型io中,read调用会出现阻塞。
Write的返回值1.返回值等于传递给write系统调用的count参数,表明请求的数据传输成功。
2.返回值大于0,但小于传递给write系统调用的count参数,表明部分数据传输成功,根据设备的不同,导致这个问题的原因也不同,一般采取再次读取的方法。
3.返回值=0,表示没有写入任何数据。
标准库在调用write时,出现这种情况会重复调用write。
4.返回值为负数,表示出现错误,并且指明是何种错误。
错误号的定义参见<linux/errno.h>5.在阻塞型io中,write调用会出现阻塞。
ioctl方法ioctl方法主要用于对设备进行读写之外的其他控制,比如配置设备、进入或退出某种操作模式,这些操作一般都无法通过read/write文件操作来完成,比如在UP-NETARM2410-S中的SPI设备通道的选择操作,无法通过write操作控制,这就是ioctl操作的功能。
用户空间的ioctl函数的原型为:其中的…代表可变数目的参数表,实际中是一个可选参数,一般定义为:驱动程序中定义的ioctl 方法原型为:inode 和 filp两个指针对应应用程序传递的文件描述符fd,cmd不会被修改地传递给驱动程序,可选的参数arg则无论用户应用程序使用的是指针还是其他类型值,都以unsigned long的形式传递给驱动。
ioctl方法的命令编号确定由于为了防止向不该控制的设备发出正确的命令,LINUX驱动的ioctl方法中的cmd参数推荐使用唯一编号,编号方法并根据如下规则定义:编号分为4个字段:1.type(类型):也称为幻数,8位宽。
2.number(号码):顺序数,8位宽。
3.direction(方向):如果该命令有数据传输,就要定义传输方向,2位宽,可使用的数值:a)_IOC_NONEb)_IOC_READc)_IOC_WRITE4.size(大小):数据大小,宽度与体系结构有关,在ARM上为14位。