卫星和飞船的跟踪测控
- 格式:doc
- 大小:366.00 KB
- 文档页数:12
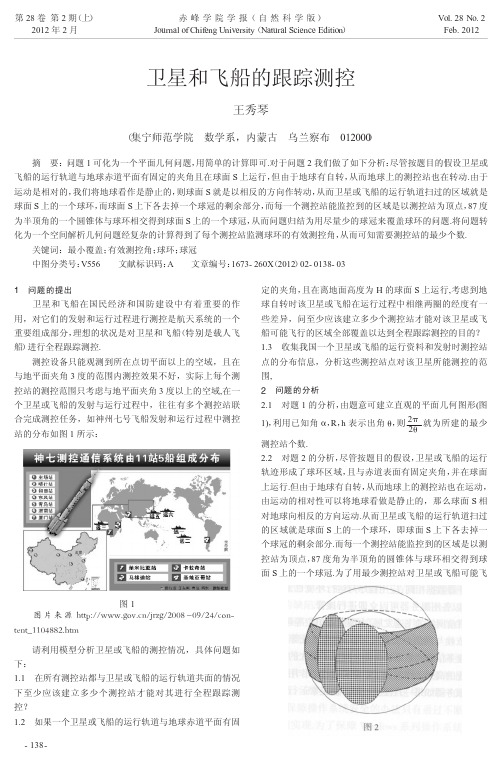
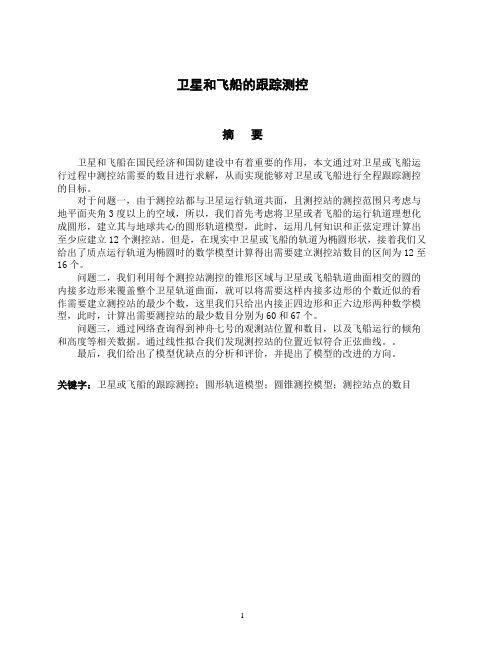
Vol.28No.2Feb.2012赤峰学院学报(自然科学版)Journal of Chifeng University (Natural Science Edition )1问题的提出卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控.测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域,在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,如神州七号飞船发射和运行过程中测控站的分布如图1所示:请利用模型分析卫星或飞船的测控情况,具体问题如下:1.1在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控?1.2如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H 的球面S 上运行,考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,问至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域全部覆盖以达到全程跟踪测控的目的?1.3收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,分析这些测控站点对该卫星所能测控的范围,2问题的分析2.1对题1的分析,由题意可建立直观的平面几何图形(图1),利用已知角α,R ,h 表示出角θ,则2π2θ就为所建的最少测控站个数.2.2对题2的分析,尽管按题目的假设,卫星或飞船的运行轨迹形成了球环区域,且与赤道表面有固定夹角,并在球面上运行.但由于地球有自转,从而地球上的测控站也在运动,由运动的相对性可以将地球看做是静止的,那么球面S 相对地球向相反的方向运动.从而卫星或飞船的运行轨道扫过的区域就是球面S 上的一个球环,即球面S 上下各去掉一个球冠的剩余部分.而每一个测控站能监控到的区域是以测控站为顶点,87度角为半顶角的圆锥体与球环相交得到球面S 上的一个球冠.为了用最少测控站对卫星或飞船可能飞卫星和飞船的跟踪测控王秀琴(集宁师范学院数学系,内蒙古乌兰察布012000)摘要:问题1可化为一个平面几何问题,用简单的计算即可.对于问题2我们做了如下分析:尽管按题目的假设卫星或飞船的运行轨道与地球赤道平面有固定的夹角且在球面S 上运行,但由于地球有自转,从而地球上的测控站也在转动.由于运动是相对的,我们将地球看作是静止的,则球面S 就是以相反的方向作转动,从而卫星或飞船的运行轨道扫过的区域就是球面S 上的一个球环,而球面S 上下各去掉一个球冠的剩余部分,而每一个测控站能监控到的区域是以测控站为顶点,87度为半顶角的一个圆锥体与球环相交得到球面S上的一个球冠,从而问题归结为用尽量少的球冠来覆盖球环的问题.将问题转化为一个空间解析几何问题经复杂的计算得到了每个测控站监测球环的有效测控角,从而可知需要测控站的最少个数.关键词:最小覆盖;有效测控角;球环;球冠中图分类号:V556文献标识码:A 文章编号:1673-260X (2012)02-0138-03图片来源/jrzg/2008-09/24/con -tent_1104882.htm图1第28卷第2期(上)2012年2月138--行的区域全部覆盖达到全程跟踪测控,即问题归结为用尽量少的球冠来覆盖球环的问题.则需要把测控站都建在赤道上,两个相邻的测控站可以分别形成两个测控区域,这两个测控区域相交后可得到两个交点,这两个交点恰好在球环的上下边界处,才能全部覆盖球环区域,以达到全程跟踪测控的目的,即将问题转化为一个空间解析几何问题.由此可以作出图3,经过复杂的计算得到了每个测控站监测球环有效测控角,即平面A'OB'与平面AOB所形成二面角A'B'-O-AB的平面为覬则平面角得二倍就是有效测控的最大范围,可知2π2覬就是所建最少测控站个数.3模型的基本假设与参数说明3.1基本假设(1)卫星或飞船的运行轨道是圆.(2)测控站的选择不受地域等各种因素的限制,由于所求得最少测控站得个数,所以测控站选在赤道上建立.3.2参数说明α:监控站监控视角的一半;θ:测控区域所对地球圆心角的一半;γ:卫星或飞船的运行轨道与地球赤道平面的固定夹角;β:与固定夹角γ互余的角;覬:相邻两个侧空站的有效测控视角的一半h:地球表面到卫星或飞船轨道的高度;R:地球的半径;l:地球表面上一点G到点N的距离;s:卫星或飞船运行轨道上一点M到点N的距离;S:表示卫星或飞船运行的球面;K:表示测控站与卫星或飞船得运行轨道共面时所需测控站的最少个数;K':表示测控站与卫星或飞船得运行轨道共面时所需测控站的个数;P:表示卫星或飞船得运行轨道与地球赤道平面由固定夹角时所需测控站的最少个数;P':表示卫星或飞船得运行轨道与地球赤道平面由固定夹角时所需测控站的个数;4模型的建立与问题的求解4.1对问题1的解答依据题意,有如下平面图:以球心O为圆心,R为半径的圆代表地球,R+h为半径的圆代表卫星或飞船运行的轨迹.根据图3有cosθ=R+LR+h(1)tanα=SL(2)由(2)变形得S=tanα(3)根据勾股定理得(R+h)2=(R+L)2+S2(4)将(3)代入(4)得(R+h)2=(R+h)2+(Ltanα)2(5)由(5)整理得(tanα2+1)L2+2RL-(2RH+h2)=0(6)由(6)解得L=-R±R2+(tan2+1)(2Rh+h2)姨由L≥0得L=-R+R2+(tan2+1)(2Rh+h2)姨(tan2+1)(7)将(7)代入(1)得cosθ=-R+-R+(R+1)2+tan2α(2Rh+h2)姨tan2α+1R+h(8)化解(8)得cosθ=Rtan2α+(R+h)2+tan2α(2Rh+h2)姨(R+h)(tan2α+1)(9)由(9)得,θ=arccos=Rtan2α+(R+h)2+tan2α(2Rh+h2)姨(10)则测控站的最少个数为K'=2π=π(11)当K'为整数时K=K'否则K=[K']+1(2)对问题2的解答以球面S和地球共圆中心为圆心,z轴垂直向上,赤道所在平面为xoy面,建立直角坐标系,则地球表面方程为x2+y2+z2=R2,球环S的方程为x2+y2+z2=(R+h)2,在图4中,AB 所在的球冠为一个测控站覆盖的区域,为此测控站建立在赤道与x轴的交点O'上,A'和B'相邻的两个测控站的交点,并且交点分别在球环的上下边界,C和C'分别为AB和A'B'的中点,则平面ABO和平面A'B'O构成的二面角就是有效测控角的一半,∠COC'为二面角的平面角,以下我们来求此角.由图4得x2+y2=tan2βz2x2+y2+z2=(h+R)姨2(13)解(13)得z2=(h+R)2(14)139--将(14)代入(13)得球环上边界方程;x 2+y 2=tan 2β(h+R)21+tan 2β(15)由图4得x 2+y 2=tan 2α(x-R)2x 2+y 2+z 2=(h+R)2(16)解(16)得,x=Rtan 2α±(h+R)2+tan2αR(2h+R)姨(17)将(17)代入(16)得,y 2+z 2=tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨-姨姨R2(18)由(15)和(18)联立得方程组,x 2+y 2=tan 2β(h+R)2y 2+z 2=tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R2姨姨姨姨姨姨姨姨姨姨姨姨姨(19)化解(19)得,x 2-z 2=tan 2β(h+R)2-tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R2(20)将(14)和(20)联立得z 2=(h+R)2x 2-z 2=tan 2β(h+R)21+tan 2β-tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R 2姨姨姨姨姨姨姨姨姨姨姨姨姨(21)解(21)得A'的坐标为x'=(h+R)2-tan 2α(±(h+R)2+Rtan2α(2h+R)姨-R)2姨y'=tan 2α±(h+R)2+tan 2αR(2h+R)姨-R 姨2-(h+R)21+tan2β姨姨姨姨姨姨姨姨姨姨姨姨姨姨由B'点与B 点关于x 轴对称可得B'(x',y')由C'点是B'点和B 点的中点可得C'(x',y')oc'=x'2+y'2姨由图3得cos γ=ocR+h(22)将(22)变形得oc=(R+h)cos γ即C((R+h)cos γ,0)由此开可以得cos 覬=o 姨c oc 姨姨'|o 姨c ||oc姨姨'|即覬=arccos1-tan 2α(±(h+R)2+Rtan2α(2h+R)姨-R)2(1+tan 2α)2(R+h)2姨所以侧控站最少个数为P'=2π2覬=π覬当P 为整数时P=P'否则P=[P']+1———————————————————参考文献:〔1〕刘承平.数学建模方法[M].北京:高等教育出版社,2002.〔2〕吕林根.解析几何[M].北京:高等教育出版社,2001.140--。

卫星测控系统工作原理今天咱们来唠唠卫星测控系统这个超级酷的玩意儿的工作原理。
卫星测控系统啊,就像是卫星在太空中的贴心保姆和超级管家。
想象一下,卫星在那么遥远的太空里飘着,要是没有这个测控系统,就像一个小孩子在外面迷路了没人管一样可怜巴巴的呢。
卫星发射出去之后,测控系统的第一个任务就是要找到卫星。
这就好比你在茫茫人海里找一个穿着特定衣服的小伙伴。
测控站通过发射信号,这个信号就像一个呼唤的声音,在太空中寻找卫星的回应。
卫星呢,就像听到妈妈呼唤的小宝贝,会把自己的一些基本信息,像是“我在这儿呢,我现在状态咋样”之类的,通过信号回传给测控站。
这信号就像卫星的小嘴巴,在跟地球上的测控站聊天呢。
等测控系统找到卫星之后啊,就开始时刻关注它的健康状况了。
卫星在太空里可会遇到各种各样的状况,就像我们人会生病一样。
测控系统会监测卫星的各种参数,比如说卫星的温度啦。
你想啊,在太空里,一会儿被太阳晒得滚烫,一会儿又冷得像冰窖,卫星要是没有测控系统看着温度,说不定就会被热坏或者冻坏呢。
还有卫星的电量,这就像卫星的能量小口袋,测控系统得盯着电量够不够用,要是电量快没了,就得想办法让卫星调整自己的状态,节省用电,就像我们在手机快没电的时候赶紧关掉一些不必要的程序一样。
而且哦,卫星的轨道也是测控系统要重点照顾的。
卫星在太空里沿着特定的轨道飞行,可是太空里也有很多小“调皮鬼”,比如说其他天体的引力影响啊,微小的太空垃圾碰撞产生的力啊,都可能让卫星偏离轨道。
这时候测控系统就像一个轨道纠察员,一旦发现卫星轨道有点歪了,就会发送指令让卫星调整。
这个指令就像是给卫星的小导航,告诉它该往哪儿飞,怎么飞才能回到正确的轨道上。
再说说卫星的任务控制方面吧。
卫星可不是发射上去玩的,它有各种各样的任务呢,像拍照、收集气象数据之类的。
测控系统就像是卫星任务的导演,告诉卫星什么时候该做什么事。
比如说要拍一张地球某个地方的照片,测控系统就会给卫星发指令,告诉它把镜头对准哪儿,什么时候按下快门。
卫星和飞船的跟踪测控摘要卫星和飞船在国民经济和国防建设中有着重要的作用,本文通过对卫星或飞船运行过程中测控站需要的数目进行求解,从而实现能够对卫星或飞船进行全程跟踪测控的目标。
对于问题一,由于测控站都与卫星运行轨道共面,且测控站的测控范围只考虑与地平面夹角3度以上的空域,所以,我们首先考虑将卫星或者飞船的运行轨道理想化成圆形,建立其与地球共心的圆形轨道模型,此时,运用几何知识和正弦定理计算出至少应建立12个测控站。
但是,在现实中卫星或飞船的轨道为椭圆形状,接着我们又给出了质点运行轨道为椭圆时的数学模型计算得出需要建立测控站数目的区间为12至16个。
问题二,我们利用每个测控站测控的锥形区域与卫星或飞船轨道曲面相交的圆的内接多边形来覆盖整个卫星轨道曲面,就可以将需要这样内接多边形的个数近似的看作需要建立测控站的最少个数,这里我们只给出内接正四边形和正六边形两种数学模型,此时,计算出需要测控站的最少数目分别为60和67个。
问题三,通过网络查询得到神舟七号的观测站位置和数目,以及飞船运行的倾角和高度等相关数据。
通过线性拟合我们发现测控站的位置近似符合正弦曲线。
最后,我们给出了模型优缺点的分析和评价,并提出了模型的改进的方向。
关键字:卫星或飞船的跟踪测控;圆形轨道模型;圆锥测控模型;测控站点的数目1、问题重述1.1 背景资料现代航天工业中卫星和飞船的测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。
在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,因此需要分析卫星或飞船的测控情况。
1.2 需要解决的问题问题一:在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控。
问题二:如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H的球面S上运行。

海上卫星发射场的测控与遥感技术近年来,随着卫星技术的快速发展,海上卫星发射场逐渐成为航天领域的新热点。
海上卫星发射场具有灵活性和多样性的特点,同时还能够避免陆地上的限制和风险,因此在一定程度上提升了我国的卫星发射能力。
而测控与遥感技术则是海上卫星发射场实现有效发射和监测的关键。
测控技术是指通过测量和控制手段,实现对卫星的坐标、速度、姿态等参数进行测量和调整的技术。
在海上卫星发射场中,测控技术起到了关键的作用。
首先,测控技术可以实现对卫星发射过程中的各个阶段进行监测和控制,确保卫星能够顺利地进入预定轨道。
其次,测控技术可以对卫星的姿态进行实时调整,保证卫星能够准确地对地面进行观测和通信。
此外,测控技术还可以通过精确的测量和计算,提高卫星的轨道确定精度和引力效应的补偿能力。
遥感技术是指通过卫星携带的遥感传感器对地球表面进行观测和监测的技术。
在海上卫星发射场中,遥感技术可以发挥重要的作用。
首先,遥感技术可以对海上卫星发射场的天气和海洋状况进行监测,确保发射过程的安全性。
其次,遥感技术可以对发射场附近的海域和陆地进行观测,提供相关数据支持,为海上卫星发射提供有力的保障。
最后,遥感技术还可以对卫星发射后的轨道和姿态进行实时监测,确保卫星能够保持良好的工作状态。
海上卫星发射场的测控与遥感技术的研究与应用面临一些挑战和问题。
首先是测控技术的精确性和稳定性要求很高,需要对传感器和测量设备进行精密校准和定位。
其次是遥感技术需要克服由海洋环境和大气扰动导致的观测误差,提高数据的可靠性和精确度。
此外,随着卫星发射场的规模和复杂度增加,测控与遥感技术的实时性和自动化程度也面临一定的挑战。
为解决这些挑战和问题,有必要加强海上卫星发射场的测控与遥感技术研究和创新。
首先,在测控技术方面,可以研发更高精度和更稳定的测控设备,提高测量精度和定位能力。
同时,借助于人工智能和大数据技术,可以实现测控过程的自动化和智能化。
其次,在遥感技术方面,可以继续改进传感器的设计和性能,提高数据采集和处理的能力。
卫星和飞船的跟踪测控摘要本文对问题中各种情况下应建立的测控站个数进行了模型构建、并采集资料,并分析了资料中所建测控站对卫星所能测控的范围。
首先,通过对文章仔细分析、并查阅相关资料和合理的假设,给所分析的问题提供了思路及依据,进而得到明确的答案和相关模型。
对于第一问,在所有测控站都与卫星或飞船的运行轨道共面的情况下,我们想到使卫星或飞船飞的尽可能高,这样测控站测控范围就越大,测控站就越少,通过画图及正弦定理求出测控最大视角,再用︒360除以测控最大视角,可得至少应建立的测控站个数,用MATLAB 软件算得20个。
由于第二问中,卫星围绕地球转的同时,地球也再自转,卫星运行过程中并存在有经度差异,故此题过于复杂,我们对过程采用分解后再结合的方法,先假设地球不自转而卫星旋转,据画图及正弦定理可得测控最大视角2β。
在地球自转同时卫星也转动的时候,在卫星运转一周时间内,地球所在卫星旋转轨道平面内所走的距离可求得:t V C 11=。
通过画图分析得两个测控站的距离:︒=90βπR l 。
则由于地球自转而引起测控站多余的数目为:βπηR t V l C 1190︒=='。
卫星旋转w 周时其最大经度差为2π,由以上推论在同一纬度上增加的测控站个数βπβπη=='''22;则总的测控站数目为: H R R +︒-︒︒=93sin arcsin 8790η(R Vt πλcos 2-)(HR R s i i n +︒-︒+93arcsin 871π) 在问题三中,我们通过查阅相关资料,并从中获得了有关神七运行的基本信息,通过对上述所建模型进行检验,得出的测控站的位置以及所测控的范围与实际情况基本吻合。
关键词:卫星、运行轨道、地球自转、经度差、测控站一、问题重述卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控。
卫星和飞船的跟踪测控摘要卫星和飞船在国民经济和国防建设中有着重要的作用,它与人们日常生活密切联系,如卫视节目、天气预报、环境监测等等,而对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,如何对卫星和飞船(特别是载人飞船)在椭圆轨道上进行全程跟踪测控是一个非常棘手的问题,本文用估算法模型很好得解决了这一问题,并建立了卫星和飞船轨道与赤道存在固定夹角且受地球自转影响下实际监控模型。
本文是针对卫星和飞船的跟踪测控而建立的数学模型。
在问题l中,建立了地心张角与监控器张角及飞船高度关系模型、估算法模型、圆锥测控模型。
并以神舟七号飞船为例算出建站个数。
在问题2中,建立了监控器斜穿飞船轨道下方时,地心张角与监控器在地球自转情况下的实际监测张角关系及建站模型,并以神舟七号飞船为例算出建站个数。
在问题 3中,运用墨卡托投影原理得出了单个测控站的测控范围,则可得到所有测控站的总测控范围。
关键词:圆锥测控地球自转估算法模型墨卡托投影原理一问题重述卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控。
测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。
在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,如神州七号飞船发射和运行过程中测控站的分布如下图所示:请利用模型分析卫星或飞船的测控情况,具体问题如下:1. 在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控?2.如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H 的球面S 上运行。
考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,问至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域全部覆盖以达到全程跟踪测控的目的?3. 收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,分析这些测控站点对该卫星所能测控的范围。
二 、基本假设2.1 假设地球是一个标准的几何球体,且卫星或飞船运行轨道为圆。
2.2 不考虑地球公转的影响。
2.3 不考虑影响测控站分布的地理因素。
2.4 假设卫星或者飞船是个质点,且在空中运行速度大小不变。
2.5 假设收集到的资料准确可靠。
2.6 忽略外界对研究对象的影响(如其他天体对卫星或者飞船的万有引力等)。
2.7 假设卫星或者飞船的运行方向与地球自转方向相同。
2.8 测控站中的测控设备在测控过程中始终能正常工作。
2.9 只研究卫星或飞船进入预定轨道之后正常运行的跟踪测控。
三、符号约定3.1 地球半径----R3.2 卫星或者飞船距离地球表面的垂直高度----H 3.3 卫星或飞船运行周期---- 2T3.4 万有引力常量----G,大小等于6.67⨯1110-22()/N m kg ∙ 3.5 地球质量----M 3.6 卫星或飞船质量----m 3.7 测控站个数----n3.8 卫星或飞船运行轨道与赤道平面的夹角----β3.9 圆两端点与地心连线所成的圆心角----α3.10 卫星或飞船运行的角速度----ω3.11 卫星或飞船运行的线速度----v3.12 等效后正方形两侧边端点与地心连线所成的圆心角----δ四、模型建立与求解4.1 问题一若在所有测控站都与卫星或飞船的运行轨道共面的情况下,即可认为所有测控站都分布在同一圆上,因此只需考虑卫星或飞船的运行轨道差异。
(1)若卫星或飞船的运行轨道位于同步卫星运行轨道上,则卫星或飞船的运行速度与地球自转速度相同,此时只需1个测控站就可以对卫星或飞船进行全程监控。
(2)若卫星或飞行位于其他轨道上,则此时需要n个测控站来监控。
因此,由于测控设备只能观测到所在点切平面以上的区域,且在与地平面夹角03的范围内测控效果不好,因此,除去与地平面夹角03内的范围,考虑实际测控范围与卫星轨道面的相交圆,利用每个相交圆的直径在地心所对的圆心角2α,即可计算出全程监控所需的最少测控站个数。
其示意图如下图1所示:图1测控站监控的空间区域示意图因此,其一般模型是在地球表面均匀建立测控站,其算法如下:0sin 93sin R H Rθ=+则0sin 93arcsin RR Hθ∙=+,所以α=0093180ππθ--=0087180π-0sin 93arcsin RR H ∙+, 因此测控站个数n=πα由上述可知,用matlab 软件计算可知:n 是关于H 的分段函数,即代入神州七号的运行资料可得n=124.2问题二4.2.1 名字解释:顺角:在赤道平面卫星或飞船运行轨道方向与地球自转方向夹角小于090的角。
星下点:人造地球卫星在地面的投影点(或卫星和地心连线与地面的交点)称星下点,用地理经、纬度表示。
星下点轨迹:卫星或飞船和地球自转使星下点在地球表面移动,形成星下点轨迹。
轨道夹角:轨道平面与地球赤道平面的夹角。
考虑到地球自转方向为自西向东,为在卫星或飞船发射过程中可节省燃料,因此假设卫星或飞船的运行方向也为自西向东。
即只考虑顺行轨道方向。
4.2.2 模型的分析与建立由于卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在运行过程中相继两圈的经度存在差异,可知这种差异与垂直高度H 、地球自转有关,且可知这种差异与夹角β也有着内在的关系。
由题可知,只考虑地球自转和夹角的类型对经度的影响,即考虑卫星或飞船绕地球运行轨道与赤道平面的夹角为顺角的情况。
下面研究地球自转和地面高度对经度的影响,如下图2所示,为卫星运行轨道模拟图4,4,4,H R n H RH R <>⎧⎪===⎨⎪><⎩图2 卫星绕地球运行且夹角为顺角的轨道模拟图由天体物理力学中的万有引力和圆周运动知识可知:ω=v =22T =由上式可知:随着高度H 的增大,卫星或飞船的角速度ω减小,运行速度v 减小,运行周期T 增大。
即在距离地球表面较近处,对卫星或飞船的全程监控所用测控设备较多,在距离地表较远处,所用测控设备较少,这与问题一中所得结果相一致,因此问题一的模型具有一定的准确性。
由上述分析且考虑到地球自转,夹角为顺角的情况,由天体物理知识可得,卫星或飞船的星下点轨迹均匀得分布在赤道两边,即南纬σ和北纬σ之间,因此,在卫星或飞船的星下点轨迹较为简单的情况下,只需测控南纬σ和北纬σ之间的区域,就可以实现对该卫星或飞船的全程测控。
其示意图如下图3所示:图3 卫星或飞船运行两圈后星下点轨迹示意图4.2.3 模型的计算如上图所示,星下点轨迹是一条均匀分布在赤道两侧的近似正弦曲线,因此在问题一的模型上加以改进,即将卫星或飞船的运行轨迹等效为圆的内接正方形,此处也可以采用内接正六边形,其覆盖率到达82.74%,正方形面积覆盖率也达到63.69%,但在此问题上,考虑正方形优化效果更好。
其如下图4所示图4 等效后的卫星或飞船测控区域由上图所示,只需求出内接正方形两侧边中点与地心连线所成的夹角δ即可,具体算法如下:在AOC ∆中,由正弦定理可知:AC=()0sin sin 93R H α+,0'0sin sin87()sin 93R H O A α+=,0'sin cos87()sin 93R H O C α+=,又'O E =()sin R H β+, 在'Rt O EF ∆中有'O D(R H + 所以在'R t O O D ∆中,可得''t a n 2O D O O δ==00sin cos87sin 93R H α++,所以00sin cos87sin 93R Hδα=++,因此测控站的个数n=[ 2πδ],在问题求得α基础上,且查资料可得神州七号部分相关资料 R=6400km,H=347km, β=042.4,由matlab 软件计算可得 n=104.3问题三4.3.1 模型分析 在问题二的基础上,搜集了我国神州7号飞船运行资料和相关测控站点的分部信息,飞船运行在轨道倾角42.4度、近地点高度220公里、远地点高度347公里的椭圆轨道上,实施变轨后,进入343公里的圆轨道。
根据测控站在卫星轨道上的测控范围的边界点与地心连线得出在地球表面上与该范围对应区域并建立相应模型,利用墨卡托投影原理和油膜法,得出测控站点对神州7号所能测控的范围。
查得国内固定6站和国外4站经纬列表如下:由上表可知:测控站所在地纬度大致分布在南纬0'3326—北纬0'3941,经度大致分布在西经70°38′—东经0'12018。
若将地球沿经度方向切开平展,沿纬度方向平均分成24段,沿经度方向分成36段,则每段经度差异为10度。
因为地球赤道周长为4万千米,所以相邻两经度的距离d 约为6101.1 m ,卫星运行轨道离地面高度为343千米,地球半径为6400千米。
因此只要计算出地球上每个测控设备对神州七号的测控范围,则可近似得出这10个测控站总的测控范围。
4.3.2 模型建立如下图5所示,需要计算的量是0r图5 卫星或飞船运行轨道圆在地球表面的投影示意图根据三角形相似tr H R R0=+解出: 601073.1⨯=+=t HR Rr (米) 由0r 与d 的关系知:20≈dr 可认为测控站测控到卫星轨道圆面在地球上的投影是一个以2个方格子为半径的圆面,则对应的经度为040,纬度为015。
且由上表可知:10个测控站位于西经70°38′—东经0'12018,则对卫星或飞船的测控总范围大致在: 西经0'3038—东经0'16018 南纬'01826—北纬0'5441五、模型评价卫星运行平面对于问题一,我们建立的是圆形轨道模型,合理地对问题进行了简化,从而使得问题得以解决,但根据开普勒第一定律,天体运行轨道都是椭圆,因此具有一定的误差,但由于在解决问题一时所作假设较少,因此也具有较强的实用性;而且在问题二中,将圆形轨道拓展到椭圆轨道,对解决问题二起着重要的作用;另外,此模型适用性较强的方面就是运用神州七号飞船进行验证时所得数据结果与实际结果相差较小,因此具有较高的精确性和可行性;对于问题三,运用墨卡托投影原理得出了卫星或飞船的运行轨迹在地表的投影范围,从而可以得到测控站的测控范围,但不足的地方仍然存在,可能因为数据不精确、所用近似程度较大从而导致一定的误差。
六、参考文献[1].漆安慎,杜婵英.力学[M].北京:高等教育出版社,1997[2].李养成,郭瑞芝.空间解析几何[M].北京:科学出版社,2004[3].姜启元.数学建模(第三版)[M].北京:高等教育出版社,2004[4].姜启元,谢金星.数学建模案例选集[M].北京:高等教育出版社,2006[5].刘来福,曾文艺.数学模型与数学建模[M].北京:北京师范大学出版社,1997附录:问题一---计算程序:r=6400000,h1=220000,h2=347000,A1=87*pi/180-asin(sin(93*pi/180)*r/(r+h1))A2=87*pi/180-asin(sin(93*pi/180)*r/(r+h2))n1=pi/A1n2=pi/A2结果:r =6400000h1 =220000h2 =347000A1 =0.2113A2 =0.2738n1 =14.8679n2 =11.4727问题二---计算程序:r=6400000,h=347000,a=0.2738,b=42.4*pi/180m=sin(a*pi)*sin(a*pi)*sin(87*pi/180)*sin(87*pi/180)/(sin(93*pi/180)*s in(93*pi/180))k=sin(b)*sin(b)l=sqrt(m-k)n=(sin(a)*cos(87*pi/180))/sin(93*pi/180)+r/(r+h)p=2*atan(l/n)N=2*pi/p结果:r =6400000h =347000a =0.2738b =0.7400m =0.5745k =0.4547l =0.3461n =0.9627p =0.6903N =9.1024问题三---计算程序r=6400000,h=343000,t=1824300,m=1100000 n=r*t/(r+h)b=n/m结果r =6400000h =343000 t =1824300 m =1100000 n =1.7315e+006b =1.5741。