串口驱动概述
- 格式:pdf
- 大小:82.50 KB
- 文档页数:8
串口驱动芯片串口驱动芯片是一种用于控制和管理串行通信的集成电路。
它具有将平行数据转换为串行数据以进行传输的功能,并可以实现数据的发送和接收。
串口驱动芯片一般用于连接计算机和外部设备,如打印机、调制解调器、传感器等。
串口驱动芯片的主要功能包括以下几个方面:1. 数据转换:串口驱动芯片可以将来自计算机的并行数据转换成串行数据,并通过串口进行传输。
它可以将多个数据位按照一定的顺序进行打包,然后通过串口一次性传输出去。
而接收端的串口驱动芯片则可以将串行数据转换成并行数据,使其可以被外部设备处理。
2. 波特率控制:串口通信中的波特率是指每秒钟传输的比特数。
串口驱动芯片可以根据要求设置不同的波特率,以适应不同的传输速度。
它可以通过调整内部的时钟频率来改变数据传输的速度,以满足不同设备的要求。
3. 错误检测和纠正:串口通信中可能会出现数据传输错误的情况,例如数据位出错、校验位错误等。
串口驱动芯片可以通过内部的校验位和错误检测电路来检测和纠正这些错误。
它可以对接收的串行数据进行校验,以确保数据的完整性和准确性。
4. 数据缓冲区管理:串口通信中,数据的发送和接收往往不是实时进行的,而是通过缓冲区进行存储和管理。
串口驱动芯片通过内置的数据缓冲区可以实现对数据的管理和控制。
它可以自动将接收到的数据存储到缓冲区中,然后按照一定的规则进行处理和传输。
5. 控制信号管理:串口通信中除了数据信号外,还需要一些控制信号来控制数据的传输和处理。
串口驱动芯片可以实现对这些控制信号的管理和控制。
例如,它可以控制串口的发送和接收使能信号,以及控制数据的开始和停止信号等。
串口驱动芯片的应用广泛,可以用于各种串口通信设备,如计算机、嵌入式系统、通信设备等。
随着技术的发展,串口驱动芯片也在不断更新和改进,提供更高的传输速度和更稳定的性能。
同时,串口驱动芯片也逐渐采用了更小尺寸和更低功耗的设计,以适应不同应用场景的需求。
总之,串口驱动芯片是一种用于控制和管理串行通信的集成电路,它具有数据转换、波特率控制、错误检测和纠正、数据缓冲区管理以及控制信号管理等功能。
windows与android usb串口通信原理一、引言随着移动设备的普及,Android操作系统成为了最为主流的移动操作系统之一。
而在软硬件设备之间进行通信的需求也越来越高。
本文将介绍Windows与Android系统通过USB串口进行通信的原理。
二、USB串口通信概述USB串口通信是将数据通过串口进行传输的一种方式。
USB (Universal Serial Bus)是一种常见的计算机外设接口,而串口作为传统的通信接口之一,在一些设备中仍然得到广泛应用。
通过USB串口通信,可以实现不同设备之间的数据传输和通信。
三、Windows与Android USB串口通信原理1. USB驱动安装:在Windows平台上,如果需要与Android设备进行USB串口通信,首先需要确保系统已经安装了相应的驱动程序。
一般情况下,当连接一个支持USB串口通信的Android设备时,Windows系统会自动安装驱动程序。
但如果系统无法自动安装所需的驱动程序,用户需要手动安装驱动。
2. Android设备USB配置:为了确保Android设备能够以USB串口模式工作,需要在系统设置中进行相应的配置。
用户需要前往设备的设置菜单,并启用“开发者选项”。
在“开发者选项”中,打开“USB调试”和“USB串口调试”选项。
3. 应用程序通信:一旦安装了必要的驱动程序并进行了相关的设备配置,用户可以通过编写应用程序来实现Windows与Android之间的USB串口通信。
在Windows平台上,用户可以使用开发工具如Visual Studio来编写应用程序。
而在Android平台上,用户可以通过Android Studio等工具进行开发。
4. USB设备连接与数据传输:通过USB接口连接Windows计算机与Android设备,并确保设备处于串口调试模式下。
在应用程序中,用户可以使用相应的API来实现USB串口通信。
通过这些API,用户可以完成如打开串口、读取数据、写入数据等操作。
串⼝驱动----⾯向对象化很怀疑写这段程序的⼈是先学的⾯向对象后学的嵌⼊式,呵呵,挺好的.1、c中想和⾯向对象有关系,⼀定会⽤到函数指针,于是定义了⼀堆函数指针,都是和某个串⼝操作有关系的typedef int (*serial_init_func_t)(int);typedef int (*serial_read_func_t)(void);typedef int (*serial_write_func_t)(int);typedef int (*serial_poll_func_t)(void); //串⼝接收数据查询,有数据的时候返回1typedef int (*serial_flush_input_func_t)(void);typedef int (*serial_flush_output_func_t)(void);2、为了更清晰,把这⼀堆函数指针⽤结构体封装typedef struct {serial_init_func_t init;serial_read_func_t read;serial_write_func_t write;serial_poll_func_t poll;serial_flush_input_func_t flush_input;serial_flush_output_func_t flush_output;int nIsr; //中断号} serial_driver_t;//定义了和串⼝有关的事情的结构体,成员全都是函数指针3、serial_driver_t s3c2410_serial0_driver, s3c2410_serial1_driver,s3c2410_serial2_driver;//定义了三个该结构体类型的变量,需要⼀定的内存哦4、serial_driver_t* serial_drv[]={&s3c2410_serial0_driver, &s3c2410_serial1_driver,&s3c2410_serial2_driver};//指针数组,依次指向serial_driver_t类型变量,没有指针是万万不⾏的!5、使⽤的时候如下:int Uart_Init(int whichUart, int baud){if(whichUart>=NumberOfUartDrv)return FALSE;return serial_drv[whichUart]->init(baud);//关键就是在这⾥,这个能定位到具体的哪个函数?}6、为了定位,忙活了这么些……DefSerialN(0)DefSerialN(1)DefSerialN(2)ExportSerialN(0);ExportSerialN(1);ExportSerialN(2);#define ExportSerialN(n) serial_driver_t s3c2410_serial##n##_driver = { \s3c2410_serial##n##_init, \s3c2410_serial##n##_read,\s3c2410_serial##n##_write,\s3c2410_serial##n##_poll,\s3c2410_serial##n##_flush_output,\Serial_Isr(n)}然后#define DefSerialN(n) static int s3c2410_serial##n##_init(int baud){return serial_init(n,baud);}\ static int s3c2410_serial##n##_read(void){return serial_read(n);}\static int s3c2410_serial##n##_write(int ch){return serial_write(n, ch);}\static int s3c2410_serial##n##_poll(void){return serial_poll(n);}\static int s3c2410_serial##n##_flush_input(void){return serial_flush_input(n);}\static int s3c2410_serial##n##_flush_output(void){return serial_flush_output(n);}最后调⽤了底层函数__inline static int serial_init(int ndev, int baudrate){int div=s3c2410_get_bus_clk(GET_PCLK);div=( (int)(div/16/baudrate) -1 ); //Baud rate divisior register//configure io for uartset_gpio_ctrl(Uart_def[ndev].txio);set_gpio_ctrl(Uart_def[ndev].rxio);//setup uart clockrCLKCON |= Uart_def[ndev].clkcon;bUART(ndev, oUBRDIV) = div;bUART(ndev, oUMCON) = 0;//reset and configure fifobUART(ndev, oUFCON) = UFCON_TX_REQ | UFCON_RX_REQ;bUART(ndev, oUFCON) = UFCON_FIFO_EN | UFCON_TX_TR8 | UFCON_RX_TR4;// bUART(ndev, oUFCON) = 0;//enable uartbUART(ndev, oULCON) = ULCON_WL8;bUART(ndev, oUCON) = UCON_CLK_PCLK | UCON_TX_INT_PLS |UCON_RX_INT_PLS | UCON_TX_INT | UCON_RX_INT |UCON_RX_TIMEOUT;return 0;}7、总结就是通过int Uart_Init(int whichUart, int baud)定位到了__inline static int serial_init(int ndev, int baudrate)底层的⼩可怜其实要是这样写也⾏:int Uart_Init(int whichUart, int serial_init){switch (whichUart){case 0:serial_init(0,baud);……}}但是这样的话Uart_Init知道serial_init的原型了,有耦合。
uart模块的驱动方法
UART(Universal Asynchronous Receiver/Transmitter)是一种常见的串行通信接口,用于在嵌入式系统中实现设备之间的通信。
在嵌入式系统中,UART模块的驱动方法通常涉及以下几个方面:
1. 初始化,首先,需要配置UART模块的参数,包括波特率、
数据位、停止位和校验位等。
这些参数的设置需要根据具体的应用
需求来确定。
通常情况下,需要根据目标设备的规格书来配置这些
参数。
2. 发送数据,一旦UART模块初始化完成,就可以使用相应的
函数来发送数据。
通常情况下,需要将待发送的数据写入到UART发
送缓冲区,然后UART模块会自动将数据发送出去。
3. 接收数据,接收数据的方法通常涉及设置接收中断或者轮询
方式。
在接收中断方式下,当接收到数据时,会触发中断,然后可
以在中断服务程序中处理接收到的数据。
而在轮询方式下,程序会
定期查询接收缓冲区是否有新的数据到达。
4. 错误处理,UART模块在传输过程中可能会出现一些错误,
比如校验错误、帧错误等。
驱动程序需要能够检测并处理这些错误,以确保数据的可靠传输。
5. 控制流,有时候需要在UART通信中实现流控制,比如硬件
流控或软件流控。
驱动程序需要支持这些流控制方式,并能够根据
需要进行配置。
总的来说,UART模块的驱动方法需要考虑到初始化、数据发送、数据接收、错误处理和流控制等多个方面。
针对不同的应用场景和
目标设备,驱动方法可能会有所不同,需要根据具体情况进行调整
和优化。
串⼝驱动程序的编写总结(⼀)8250/16450/16550芯⽚都⽤同个8250驱动1、对现有驱动进⾏拷贝,然后进⾏局部修改2、不必过多深⼊系统内核驱动的调⽤过程,区分好哪些是需要修改的,哪些是内核驱动⾃带的3、对于要修改的内容,参考别⼈成功的例⼦,看哪些需要修改的4、必要时,可以先把原拷贝先不加载进驱动,把⾃⼰拷贝的驱动加载进去5、谨记要实现的功能,按步骤实现6、知道每个模块的作⽤与功能,哪些是涉及硬件,哪些是涉及系统的,⼀般来说,进⾏设备、驱动的注册时,⼀般不涉及驱动,只有应⽤层调⽤时才进⾏硬件的相关调⽤。
7、对串⼝驱动程序的改造时如果是采⽤外部模块加载的⽅式,即insmod⽅式,⽽不是内置于内核⽣成vmlinux,则不能使⽤console驱动,否则编译会出现error: redefinition of '__inittest'/opt/kangear/hello/hello.c:16: note: previous definition of '__inittest' was here错误,会出现重定义的情况。
解决⽅法:去除console的相关驱动,屏蔽console_initcall()函数的调⽤8、对串⼝的发送的配置属性,最终调⽤底层驱动的ioctl函数。
⽽ioctl函数得执⾏copy_from_user、copy_to_user函数进⾏⽤户与内核之间的数据拷贝,⽽在ioctl函数执⾏这些操作后,底层的驱动程序才能继续对配置参数(波特率、数据位、停⽌位、检9、在⽤户层⾯操作open()函数时,会调⽤底层驱动的⼀系列默认配置参数,这是在uart_core.c⽂件⾥进⾏属性的配置10、中断有分系统中断与外部中断,系统中断在⼀开机时就已经初始好,⽽外部中断是在驱动程序启动时调⽤,⽽中断的触发是靠硬件进⾏中断请求,cpu响应进⾏处理驱动详解:1、在串⼝驱动中,中断的产⽣都是⽤户态所触发引起的。
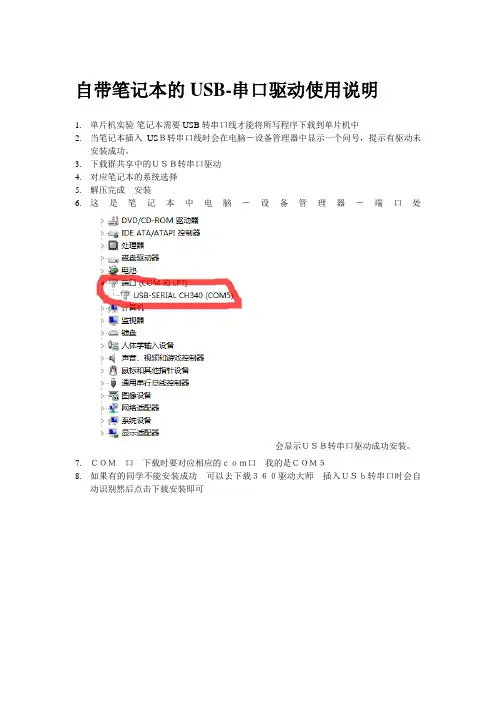
自带笔记本的USB-串口驱动使用说明
1.单片机实验-笔记本需要USB转串口线才能将所写程序下载到单片机中
2.当笔记本插入USB转串口线时会在电脑-设备管理器中显示一个问号,提示有驱动未
安装成功。
3.下载群共享中的USB转串口驱动
4.对应笔记本的系统选择
5.解压完成安装
6.这是笔记本中电脑-设备管理器-端口处
会显示USB转串口驱动成功安装。
7.COM口下载时要对应相应的com口我的是COM5
8.如果有的同学不能安装成功可以去下载360驱动大师插入USb转串口时会自
动识别然后点击下载安装即可。
usb转串口驱动有什么作用?怎么安装usb转串口驱
动?
usb转串口驱动的作用
usb转串口驱动的作用是使usb转串口硬件能在连接到电脑usb接口上时被识别为串口设备,并分配相应的可用串口编号使用。
大部分新的笔记本没有提供串口,在使用一些程序如考勤打卡机、门禁读卡器等设备时,无法将这些设备的串口直接接到电脑上进行数据的传输,这种情况下就需要用到usb转串口转换接头,转换接头连接到电脑usb 接口上时,电脑会提示发现新硬件,并会弹出向导完成驱动的安装,只有驱动安装完毕了,才能正常使用。
驱动安装指南
一。
在在win98、winme、win2000、XP等系统中。
先下载相应的驱动程序,只需先双击driver里hidcominst程序,再插上串口线,系统即可自动完成安装。
在xp系统下,完成以上步骤后,有时在设备管理器里会出现人机学设备,此时需分别用右键点击此项下的两个选项的属性,选择属性里的驱动程序这一项,选择更新驱动程序这一项,选择:从列表或指定位置安装,单击下一步,选择:不要搜索,单击下一步,选择:从磁盘安装,再选。

rs232驱动RS232驱动1. 引言RS232是一种广泛应用于计算机和外部设备之间的串行通信接口。
它使用不平衡的电压信号来传输数据,并且可以通过相同的接口线进行全双工通信。
在过去的几十年里,RS232一直是计算机系统和外部设备之间数据传输的标准方式之一。
本文将介绍RS232驱动的基本概念、工作原理和应用,以帮助读者更好地了解和应用这种通信接口。
2. RS232驱动的基本概念RS232驱动是指硬件或软件组件,用于将计算机系统与RS232接口设备连接起来,并控制数据的发送和接收。
它通常包括接口电路、驱动芯片和相关的驱动程序。
RS232接口使用一对连续的信号线来传输数据。
其中,TXD线(发送数据线)负责将计算机发送的数据转换为电压信号,而RXD线(接收数据线)负责接收外部设备发送的数据。
除了数据线之外,还包括其他信号线,如RTS(请求发送)、CTS(清除发送)等。
这些信号线在RS232驱动中起到各种控制和协调的作用。
3. RS232驱动的工作原理RS232驱动的工作原理主要涉及数据的传输和控制。
在数据传输方面,当计算机需要发送数据时,它将数据发送到TXD 线上,并通过驱动芯片转换成正高电平或负低电平的电压信号。
这种电压信号可以通过RS232接口连线传输到外部设备。
相反,当外部设备发送数据时,该数据通过RS232接口线传输到RXD线上,并由驱动芯片将其转换为计算机可以理解的数据。
在控制方面,RS232驱动通过RTS、CTS等信号线进行双向通信的流量控制。
当接收设备无法及时处理接收到的数据时,它可以发送CTS信号告知发送设备停止发送数据,以避免数据溢出。
相反,当接收设备准备好接收数据时,它可以发送CTS信号通知发送设备可以继续发送数据。
4. RS232驱动的应用RS232驱动广泛应用于许多领域,包括计算机通信、工业自动化、仪器仪表、通信设备等。
在计算机通信方面,RS232驱动常用于连接计算机和串行设备,如调制解调器、打印机等。
linux设备驱动之8250串口驱动一:前言前一段时间自己实践了一下8250芯片串口驱动的编写。
今天就在此基础上分析一下linux kernel自带的串口驱动。
毕竟只有对比专业的驱动代码才能更好的进步,同以往一样,基于linix kernel2.6.25.相应驱动代码位于:linux-2.6.25/drivers/serial/8250.c。
二:8250串口驱动初始化相应的初始化函数为serial8250_init().代码如下:static int __init serial8250_init(void){int ret, i;if (nr_uarts > UART_NR)nr_uarts = UART_NR;printk(KERN_INFO "Serial: 8250/16550 driver $Revision: 1.90 $ ""%d ports, IRQ sharing %sabled\n", nr_uarts,share_irqs ? "en" : "dis");for (i = 0; i < NR_IRQS; i++)spin_lock_init(&irq_lists[i].lock);ret = uart_register_driver(&serial8250_reg);if (ret)goto out;serial8250_isa_devs = platform_device_alloc("serial8250",PLAT8250_DEV_LEGACY);if (!serial8250_isa_devs) {ret = -ENOMEM;goto unreg_uart_drv;}ret = platform_device_add(serial8250_isa_devs);if (ret)goto put_dev;serial8250_register_ports(&serial8250_reg, &serial8250_isa_devs->dev);ret = platform_driver_register(&serial8250_isa_driver);if (ret == 0)goto out;platform_device_del(serial8250_isa_devs);put_dev:platform_device_put(serial8250_isa_devs);unreg_uart_drv:uart_unregister_driver(&serial8250_reg);out:return ret;}这段代码涉及到的知识要求,如platform ,uart等我们在之前都已经做过详细的分析。
ZPMC OPC ServerYaskawa CP系列(串口)一、概述安川CP系列(串口)驱动是专为32位ZPMC OPC Server设计的驱动,该驱动支持与YASKAWA CP316HPLC通过RS232串行通讯,将使用您的计算机中的串口。
通讯方式的设置是通过PLC的CP-717编程软件来完成的,相关内容请参考硬件配置与连接。
ZPMC OPC Server 通过计算机串口与PLC的通讯模块连接。
本驱动支持的通讯协议为Memobus协议,支持的硬件型号包括通讯模块为215IF,217IF,218IF,260IF,261IF系列的所有PLC。
支持的运行环境:硬件:CPU:Pentium IV 2.8G 及以上内存:1G以上硬盘:80G以上显卡:显示模式:1024X768网卡:10/100M自适应网卡PLC型号:CP316HPLC通讯模块:218IF-01软件:Windows2000Pro或更高版本;CP-717Ver4.39以上二、硬件连接与配置ZPMC OPC Server与Yaskawa CP系列PLC通过串口连接,连接图如下图所示:YASKAWA 软件配置PLC 通讯配置1.双击“模块构成”,配置218IF-01模块的串口设置参数。
2.双击[通用串行化A],配置端口端口号等通讯参数。
三、ZPMC OPC Server配置1.新建一个Driver,如下图:2.选择Yaskawa MP Serial 作为驱动,如下图:3.点击完成成功新建一个Driver;4.为这个驱动新建一个Device,如下图:5.Driver Name处将显示Device所属的Driver名;6.按如下图输入通讯信息:7.点击完成,ZPMC OPC Server 配置完成。
四、IO 变量定义Memory Type RangeData Type Access Input Bits IB0000.b – IBFFFE.b(b is bit number 0x0 – 0xF) Boolean Read Only Output Bits MB00000.b – MB65534.b (b is bit number 0x0 – 0xF) Boolean Read/Write Input RegistersIW0000 – IWFFFE IW0000.b – IWFFFE.b (b is bit number 0x0 – 0xF) IL0000 – ILFFFDShort, Word, BCD BooleanLong, DWord, LBCDRead OnlyIF0000 – IFFFFD FloatOutput Registers MW00000 – MW65534MW00000.b – MW65534.b(b is bit number 0x0 – 0xF)ML00000 – ML65533MF00000 – MF65533 Short, Word, BCDBooleanLong, DWord, LBCDFloatRead/Write。
串口驱动概述范文串口驱动是一种用来控制串口通信的软件,它负责处理串口的初始化、数据传输、错误处理等任务。
串口驱动在计算机系统中扮演着重要的角色,它使计算机能够与外设进行可靠的数据交换。
串口是计算机与外部设备之间数据传输的一种通信方式。
串口通信相对于并口通信(并口通信是将多个数据位一起并行传输)来说,实现起来更为灵活和简单。
串口中的数据位按照一位一位的顺序传输,这使得串口通信具有较高的可靠性和灵活性,适用于很多外部设备的通信需求,例如打印机、调制解调器、传感器等。
串口驱动的主要功能包括以下几个方面:1.初始化串口:串口驱动负责初始化串口硬件,包括设置波特率、数据位、停止位、奇偶校验位等通信参数。
通过合适的初始化配置,可以确保计算机与外设之间的数据传输按照指定的格式进行。
2.数据传输:串口驱动负责将计算机中的数据发送至外设,并将外设发送的数据传输至计算机。
数据传输可以采用两种方式:同步传输和异步传输。
同步传输是指在传输过程中,发送方和接收方通过时钟信号保持同步;而异步传输是指在传输过程中,发送方和接收方之间没有时钟信号同步。
3.错误处理:串口驱动需要能够处理因传输错误而引起的问题,例如校验错误、帧错误等。
当传输错误发生时,驱动程序需要能够检测并采取适当的措施,例如重新传输数据或产生错误报告。
4.接口管理:串口驱动需要与操作系统进行交互,以及与上层应用程序进行通信。
它需要提供一组API(应用程序接口),使得上层应用程序可以方便地调用串口功能。
这些接口包括打开串口、关闭串口、读取数据、写入数据等。
5.兼容性:串口驱动需要支持多种串口硬件设备,在不同的操作系统上能够正常工作。
为了实现兼容性,驱动程序需要对不同设备和操作系统的特性进行充分的了解,并提供相应的兼容性支持。
在实际应用中,串口驱动在很多领域都有广泛的应用,如通信、嵌入式系统、工业控制等。
通过串口驱动的控制和管理,计算机可以与外设进行可靠的数据交换,满足各种通信需求。
LPC2300串口驱动程序一、 UART串口驱动概述:本文介绍用中断驱动模式来接收和传输数据,用中断方式接收数据是比较常见的方法,但发送数据很多人还是用循环发送的方式,这种方式在当MCU速度很快,但UART发送波特率受限的情况下,是比较浪费时间的,比如ARM用70M的速度,9600的波特率,发100个字节大约100MS, 如果等发完再做别的工作,会等100MS,但把100字节放入缓冲区让中断自动发送,则只需10US就可以完成,然后就可以做其它工作了,所以中断发送方式,能更有效率。
二、接受数据:接收数据容易理解,中断中调用CommPutRxChar(),把收到数据放入接收缓冲区,对应用程序来说,调用CommIsEmpty( ) 检查接收缓存空否,调用CommGetChar( )从缓存接收字节。
三、 发送数据:应用程序发送数据时,应用程序调用CommPutChar( )把要发送数据放到缓存区,调用CommIsFull( ) 检查发送缓存满否。
TX中断调用CommGetTxChar( ) 从BUF取数据发送到串口。
问题的关键是发送第一个字节时,并没有TX中断发生,TX中断是发送后才产生。
所以第一个字如何发送出去,如何知道是第一个字节是重点。
看下面的代码,如果BUF中只有一个字节,则调用CommTxIntEn(ch);置TX 中断有效。
这里有两种实现方式:(1)发送第一个字节,发送后会产生TX中断(2)直接置位TX中断,如果MCU允许这么做。
这两种方法前提都必须先判断串口现在不忙时才可以执行这个动作。
if (pbuf->RingBufTxCtr == 1) {CommTxIntEn(ch);OS_EXIT_CRITICAL( );} else {OS_EXIT_CRITICAL( );}下面是CommTxIntEn()的部分代码,用的是第一个字节发送方式:void CommTxIntEn (INT8U ch){INT8U c,err;c = CommGetTxChar(ch, &err);switch (ch) {case COMM1:OS_EXIT_CRITICAL();while(UART0TxEmpty == 0);OS_ENTER_CRITICAL();U0THR = c;UART0TxEmpty = 0;break;}四、结束语:用中断方式发送和接收UART数据,应用程序只需调用两个函数就可以完成。
windows与android usb串口通信原理USB串口通信是一种常见的通信方式,它通过USB接口来实现计算机与外部设备的通信。
在Windows操作系统和Android操作系统中,USB串口通信都是非常常用的技术。
本文将介绍Windows和Android中USB串口通信的原理。
一、Windows中的USB串口通信在Windows中,USB串口通信是通过Windows驱动程序来实现的。
Windows驱动程序包括USB控制器驱动程序和串口通信驱动程序。
USB控制器驱动程序负责管理USB接口,将USB数据传输转换为串口数据传输。
串口通信驱动程序负责与外部设备通信,将串口数据传输转换为计算机可以理解的数据格式,并将计算机的数据传输给外部设备。
在Windows中,串口通信通常使用异步通信方式,即一个线程负责发送数据,另一个线程负责接收数据。
当计算机需要与外部设备通信时,它会创建一个串口通信线程,并打开相应的串口。
串口通信线程会不断地读取外部设备的响应数据,并将其传递给应用程序。
二、Android中的USB串口通信在Android中,USB串口通信的实现方式与Windows有所不同。
在Android 中,USB串口通信是通过Android驱动程序和Android操作系统来实现的。
Android驱动程序包括USB控制器驱动程序和串口通信驱动程序。
Android中的串口通信通常使用同步通信方式,即应用程序和外部设备之间直接进行通信,不需要通过其他线程或进程。
当应用程序需要与外部设备通信时,它会打开相应的串口,并直接与外部设备进行数据传输。
在Android中,USB串口通信的实现需要使用Android USB开发框架。
开发者可以使用Java语言编写应用程序,并通过Android USB开发框架来访问外部设备的数据接口。
开发者需要了解Android USB开发框架中的相关API和数据格式,以便正确地与外部设备进行通信。