ARM的串行口驱动程序设计
- 格式:pdf
- 大小:3.18 MB
- 文档页数:72
实验2:串行端口程序设计一、实验目的了解在linux环境下串行程序设计的基本方法。
掌握终端的主要属性及设置方法,熟悉终端I /O函数的使用。
学习使用多线程来完成串口的收发处理。
二、实验内容读懂程序源代码,学习终端I /O函数的使用方法,学习将多线程编程应用到串口的接收和发送程序设计中。
三、预备知识有C语言基础。
掌握在Linux下常用编辑器的使用。
掌握Makefile 的编写和使用。
掌握Linux下的程序编译与交叉编译过程四、实验设备及工具硬件:UP-NETARM2410-S嵌入式实验平台、PC机Pentium 500以上, 硬盘10G以上。
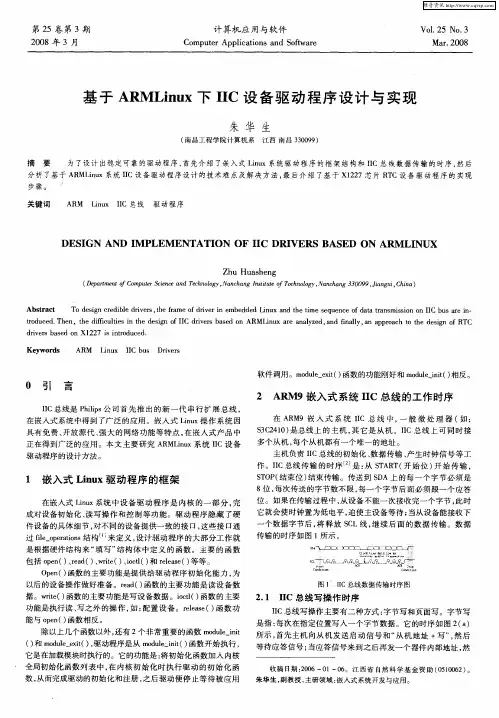
软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境五、实验原理异步串行I /O方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。
数据的各不同位可以分时使用同一传输通道,因此串行I/O可以减少信号连线,最少用一对线即可进行。
接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。
为了恢复发送的信息,双方必须协调工作。
在微型计算机中大量使用异步串行I/O方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。
但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。
图2.3.1串行通信字符格式图2.3.1给出异步串行通信中一个字符的传送格式。
开始前,线路处于空闲状态,送出连续“1”。
传送开始时首先发一个“0”作为起始位,然后出现在通信线上的是字符的二进制编码数据。
每个字符的数据位长可以约定为5位、6位、7位或8位,一般采用ASCII编码。
后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。
也可以约定不要奇偶校验,这样就取消奇偶校验位。
最后是表示停止位的“1”信号,这个停止位可以约定持续1位、1.5位或2位的时间宽度。
基于ARM-Linux的MAX1303接口与驱动程序设计杨斌;满峰;姜秀杰;刘波【摘要】针对数据采集与处理系统的应用需求,设计了嵌入Linux的ARM9处理器LPC3250与16位AD采样芯片MAX1303的硬件接口和驱动程序.首先,描述了LPC3250和MAX1303的性能、特点以及硬件接口电路设计方案.然后,在硬件平台的基础上,详细地阐述了嵌入式Linux下MAX1303驱动程序的组成模块和具体实现方法,并给出了部分源代码以及对设备驱动的测试方法.测试结果表明,系统工作正常、稳定,采样结果正确,具有实际工程应用价值.%Aiming at the application requirement of data acquisition and processing system,the paper designs driver of MAX1303 based on embedded Linux and hardware interface circuit between LPC3250 and MAX1303.Firsdy,performance characteristics of both chips and scheme of hardware interface areintroduced.Secondly,on the bases of hardware platform,the composition and implemented method of MAX1303's driver under embedded Linux are elaborated in detail.Meanwhile,part of the source code and test methods of driver is given.The test results reveal that the system operations stably and has practical value.【期刊名称】《电子设计工程》【年(卷),期】2013(021)012【总页数】4页(P173-176)【关键词】LPC3250;MAX1303;SPI;嵌入式Linux;设备驱动【作者】杨斌;满峰;姜秀杰;刘波【作者单位】中国科学院空间科学与应用研究中心,北京100190;中国科学院研究生院,北京100049;中国科学院空间科学与应用研究中心,北京100190;中国科学院空间科学与应用研究中心,北京100190;中国科学院空间科学与应用研究中心,北京100190【正文语种】中文【中图分类】TH274在数据采集系统中,通常是通过传感器将自然世界的物理量转化成电量,电量是模拟量,必须经过模/数转换才能被系统的处理器读取。
ARM简介及编程1.ARM简介(摘录) ARM(Advanced RISC Machines)是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。
技术具有性能高、成本低和能耗省的特点。
适用于多种领域,比如嵌入控制、消费/教育类多媒体、DSP和移动式应用等。
ARM将其技术授权给世界上许多著名的半导体、软件和OEM厂商,每个厂商得到的都是一套独一无二的ARM相关技术及服务。
利用这种合伙关系,ARM很快成为许多全球性RISC标准的缔造者。
目前,总共有30家半导体公司与ARM签订了硬件技术使用许可协议,其中包括Intel、IBM、LG半导体、NEC、SONY、菲利浦和国民半导体这样的大公司。
至于软件系统的合伙人,则包括微软、升阳和MRI等一系列知名公司。
ARM架构是面向低预算市场设计的第一款RISC微处理器。
2.产品介绍ARM提供一系列内核、体系扩展、微处理器和系统芯片方案。
由于所有产品均采用一个通用的软件体系,所以相同的软件可在所有产品中运行(理论上如此)。
典型的产品如下。
①CPU内核--ARM7:小型、快速、低能耗、集成式RISC内核,用于移动通信。
-- ARM7TDMI(Thumb):这是公司授权用户最多的一项产品,将ARM7指令集同Thumb 扩展组合在一起,以减少内存容量和系统成本。
同时,它还利用嵌入式ICE调试技术来简化系统设计,并用一个DSP增强扩展来改进性能。
该产品的典型用途是数字蜂窝电话和硬盘驱动器。
--ARM9TDMI:采用5阶段管道化ARM9内核,同时配备Thumb扩展、调试和Harvard 总线。
在生产工艺相同的情况下,性能可达ARM7TDMI的两倍之多。
常用于连网和顶置盒。
②体系扩展-- Thumb:以16位系统的成本,提供32位RISC性能,特别注意的是它所需的内存容量非常小。
③嵌入式ICE调试由于集成了类似于ICE的CPU内核调试技术,所以原型设计和系统芯片的调试得到了极大的简化。



基本串口通信程序设计串口通信是指通过串行接口进行数据传输的一种通信方式。
串口通信通常用于短距离的数据传输,具有稳定性强、传输速率低的特点。
本文将介绍串口通信的基本原理和程序设计。
一、串口通信基本原理串口通信是通过串行接口将数据一位一位地传输的通信方式。
串口通信的基本原理是使用两根信号线进行通信:一根是传输数据的信号线(TX),负责向外发送数据;另一根是接收数据的信号线(RX),负责接收外部发送过来的数据。
二、串口通信程序设计步骤1. 打开串口:首先需要通过操作系统提供的串口接口函数,打开需要使用的串口。
在Windows系统中,可以使用CreateFile函数打开串口;在Linux系统中,可以使用open函数打开串口。
3. 发送数据:使用WriteFile函数(Windows系统)或write函数(Linux系统),向串口发送需要传输的数据。
4. 接收数据:使用ReadFile函数(Windows系统)或read函数(Linux系统),从串口接收数据。
5. 关闭串口:数据传输完成后,需要关闭串口,使用CloseHandle函数(Windows系统)或close函数(Linux系统)即可关闭串口。
三、串口通信程序设计示例(Windows系统)下面是一个简单的串口通信程序设计示例,实现了从串口接收数据并将接收的数据原样返回的功能。
#include <iostream>#include <windows.h>int mainHANDLE hSerial;DCB dcbSerialParams = {0}; // 串口参数hSerial = CreateFile("COM1", GENERIC_READ , GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL); // 打开串口dcbSerialParams.DCBlength = sizeof(dcbSerialParams);std::cout << "Error getting serial port state\n";return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;std::cout << "Error setting serial port state\n";return 1;}return 1;}char buffer[100];DWORD bytesRead;while (1)if (ReadFile(hSerial, buffer, sizeof(buffer), &bytesRead, NULL) && bytesRead > 0)std::cout << "Received data: " << buffer << std::endl;DWORD bytesWritten;if (!WriteFile(hSerial, buffer, bytesRead, &bytesWritten, NULL))std::cout << "Error writing to serial port\n";return 1;}}}CloseHandle(hSerial); // 关闭串口return 0;以上程序打开串口COM1,设置波特率为9600,数据位为8位,停止位为1位。


基于ARM的串口通信1 串口通信技术的研究背景与前景1.1 计算机RS-232串行通信接口计算机一般提供了2个25针或者9针的RS-232标准串行口,简称COM1和COM2。
我们还可以通过插通信卡来获得额外的RS-232标准串行口。
利用这些串口可以与其他数字设备进行一般的数据通信,计算机串行接口主要应用于远程通信和低速输出设备。
由于串行数据通信传输线条数最少。
而且有许多较便宜的专用芯片来实现它,发送和接受器也简单。
因而对数据传输速度不高的计算机和数字设备间的进程通信,多采用串行通信实现。
随着计算机的迅速普及和计算机控制技术的发展,计算机被广泛应用于控制领域之中。
在控制系统中,下位机主要完成对现场数据采集和对设备一级的监控,上位机则要完成对整个系统的采集、分析、处理和控制以及数据、图形显示、打印、人机对话等工作。
上位机与下位机大多是通过PC机的RS-232串行接口实现通信。
文中的ARM开发板与PC机之间也是通过RS-232串行接口实现通信。
1.2 其他串行通信协议CAN总线的概念:CAN是控制器局域网络(Controller Area Network, CAN)的简称,是ISO国际标准化的串行通信协议。
CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。
CAN总线的特点有以下几个方面。
1. 完成对通信数据的成帧处理CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
2. 使网络内的节点个数在理论上不受限制CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。
采用这种方法的优点可使网络内的节点个数在理论上不受限制,这可使不同的节点同时接收到相同的数据。
3. 可在各节点之间实现自由通信CAN总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点。

嵌入式实验报告_ARM的串行口实验一、实验目的本次实验的主要目的是深入了解和掌握 ARM 处理器的串行口通信原理及编程方法。
通过实际操作和编程实践,能够实现基于 ARM 的串行数据收发功能,为后续在嵌入式系统中的应用打下坚实的基础。
二、实验原理串行通信是指数据一位一位地顺序传送。
在 ARM 系统中,串行口通常由发送器、接收器、控制寄存器等组成。
发送器负责将并行数据转换为串行数据并发送出去,接收器则将接收到的串行数据转换为并行数据。
控制寄存器用于配置串行口的工作模式、波特率、数据位长度、停止位长度等参数。
波特率是串行通信中的一个重要概念,它表示每秒传输的比特数。
常见的波特率有 9600、115200 等。
在本次实验中,需要根据实际需求设置合适的波特率,以保证数据传输的准确性和稳定性。
三、实验设备与环境1、硬件设备:ARM 开发板、USB 转串口线、电脑。
2、软件环境:Keil MDK 集成开发环境、串口调试助手。
四、实验步骤1、建立工程在 Keil MDK 中创建一个新的工程,选择对应的 ARM 芯片型号,并配置工程的相关参数,如时钟频率、存储分配等。
2、编写代码(1)初始化串行口首先,需要设置串行口的工作模式、波特率、数据位长度、停止位长度等参数。
例如,设置波特率为 115200,数据位长度为 8 位,停止位长度为 1 位。
(2)发送数据通过编写发送函数,将要发送的数据写入串行口的数据寄存器,实现数据的发送。
(3)接收数据通过中断或者查询的方式,读取串行口的接收寄存器,获取接收到的数据。
(4)主函数在主函数中,调用发送函数发送数据,并处理接收的数据。
3、编译下载编写完成代码后,进行编译,确保代码没有语法错误。
然后,将生成的可执行文件下载到 ARM 开发板中。
4、连接设备使用 USB 转串口线将 ARM 开发板与电脑连接起来,并在电脑上打开串口调试助手,设置与开发板相同的波特率等参数。
5、测试实验在串口调试助手中发送数据,观察开发板是否能够正确接收并回传数据。
开发板、单片机、ARM区别及简介1、开发板●开发板(demoboard)是用于嵌入式系统开发的电路板,包括一系列硬件组件,例如中央处理器,内存,输入设备,输出设备,数据路径/总线和外部资源接口。
●开发板通常由嵌入式系统开发人员根据开发需要定制,也可以由用户进行研究和设计。
开发板供初学者了解和学习系统的硬件和软件。
同时,一些开发板还提供了基本的集成开发环境以及软件源代码和硬件原理图。
常见的开发板包括51,ARM,FPGA和DSP开发板。
●简而言之,它指的是用于学习的许多单芯片外围设备的集成,例如LED灯,数字管,按钮,行和行按钮,步进电机,伺服电机,LCD显示器等。
实验,开发等。
开发板是一种实验设备(SCM编程)。
2、单片机●单片机不是执行特定逻辑功能的芯片,而是将计算机系统集成到芯片上的芯片。
它等效于微型计算机。
与计算机相比,单芯片计算机仅缺少I/O设备。
●简而言之:芯片变成了计算机。
它体积小,重量轻,价格低廉,为学习,应用和开发提供了便利的条件。
同时,学习使用单片机是理解计算机原理和结构的最佳选择。
●MCU开发板在官方ARM开发板的基础上增加了外围设备后,配备了许多功能接口,例如扩展的TFT-LCD,LVDS接口,触摸屏,VGA,矩阵键盘,外部总线接口,CAN,SPI,PWM,高速USBHOST\Device,SD卡、RS232\RS485串行端口,音频,MIC等常用接口,国内领先的嵌入式解决方案制造商经常使用具有多个核心平台的ARM开发板,因此各种技术公司的研发工程师可以轻松测试ARM开发板,而R&D公司产品可以通过开发板中的数据文件快速开发公司产品并缩短研发周期。
●在批量生产产品之前,单片机就用于产品的设计和开发,当我们有一定的理论基础研究知识时,单片机开发板就是我们的实用工具(PIC单片机)),通过单片机开发板,我们可以做一些实验来掌握学到的知识。
●单片机的应用领域非常广泛,例如智能仪表,实时工业控制,通讯设备,导航系统,家用电器等。
ARM的开发工具及仿真器介绍。
ARM开发工具综述ARM应用软件的开发工具根据功能的不同,分别有编译软件、汇编软件、链接软件、调试软件、嵌入式实时操作系统、函数库、评估板、JTAG仿真器、在线仿真器等,目前世界上约有四十多家公司提供以上不同类别的产品。
用户选用ARM处理器开发嵌入式系统时,选择合适的开发工具可以加快开发进度,节省开发成本。
因此一套含有编辑软件、编译软件、汇编软件、链接软件、调试软件、工程管理及函数库的集成开发环境(IDE)一般来说是必不可少的,至于嵌入式实时操作系统、评估板等其他开发工具则可以根据应用软件规模和开发计划选用。
使用集成开发环境开发基于ARM的应用软件,包括编辑、编译、汇编、链接等工作全部在PC机上即可完成,调试工作则需要配合其他的模块或产品方可完成,目前常见的调试方法有以下几种:1、指令集模拟器部分集成开发环境提供了指令集模拟器,可方便用户在PC机上完成一部分简单的调试工作,但是由于指令集模拟器与真实的硬件环境相差很大,因此即使用户使用指令集模拟器调试通过的程序也有可能无法在真实的硬件环境下运行,用户最终必须在硬件平台上完成整个应用的开发。
2、驻留监控软件驻留监控软件(Resident Monitors)是一段运行在目标板上的程序,集成开发环境中的调试软件通过以太网口、并行端口、串行端口等通讯端口与驻留监控软件进行交互,由调试软件发布命令通知驻留监控软件控制程序的执行、读写存储器、读写寄存器、设置断点等。
驻留监控软件是一种比较低廉有效的调试方式,不需要任何其他的硬件调试和仿真设备。
ARM公司的Ange l就是该类软件,大部分嵌入式实时操作系统也是采用该类软件进行调试,不同的是在嵌入式实时操作系统中,驻留监控软件是作为操作系统的一个任务存在的。
驻留监控软件的不便之处在于它对硬件设备的要求比较高,一般在硬件稳定之后才能进行应用软件的开发,同时它占用目标板上的一部分资源,而且不能对程序的全速运行进行完全仿真,所以对一些要求严格的情况不是很适合。
基于ARM的串口通信系统的设计
一、简介
串口通信是通过一组数据通路连接计算机外围设备控制器和计算机之间实现数据交换的一种总线技术。
ARM(可编程中央处理器)是一种高性能、低功耗、多核实时处理器。
基于ARM的串口通信系统综合应用了ARM 和UART(通用异步收发字符器),实现了ARM外设设备间的串口通信。
实现了计算机和计算机外围设备的有效沟通,为火车站、航空站、工厂等用户提供了一种更优质的通信服务。
二、系统架构
(1)主机:主机由ARM处理器构成,它与通信设备之间的数据交换工作由ARM处理器完成;
(2)外设:外设一般包括UART(通用异步收发字符器)等,用于处理来自主机的数据,并将其转换成串行数据;
(3)接口卡:接口卡用于与主机相连,它可以通过PCMCIA(插件式可移动计算机存储卡)或USB(通用串行总线)等协议来实现主机和外设之间的控制。
三、系统特点
(2)传输距离远:串口通信系统可以在两台设备之间实现10Km以内的远距离传输;。
第29卷 第4期2008年12月内蒙古农业大学学报Journal of Inne r Mongolia Agricultura l Universit yVol .29 No .4Dec .2008基于ARM 架构的嵌入式US B 驱动的设计3张永安, 杨 松, 孙 丽(内蒙古农业大学计算机与信息工程学院,呼和浩特 010018)摘要: 本文介绍了嵌入式L i nux 操作系统下USB 驱动的设计方法,论述了嵌入式产品外围接口驱动的开发过程。
采用AR M 9系列的S3C2410芯片和USB 主机控制器ISP1161A1,设计了US B 驱动程序,给出了硬件的连接方法和软件设计过程,并最终可在Linux 环境下读写US B 类设备信息。
关键词: 嵌入式系统; AR M ; USB 接口中图分类号: TP39 文献标识码: B 文章编号:1009-3575(2008)04-0200-03DESI G N OF EMBE DDE D USE DR IVER BASE D ON ARM FRAMEZHANG Y ong -an, Y ANG Shong, SH UN L i(College of Co mputer a nd Infor ma tio n,Inner Mongolia Agricultura l U ni versity ,Huhhot 010018,China )Abs tra c t: This paper introduced a desig n measure abou tUS B driv e unde r embedded Linux operati ons s ystem ,discussed the deve l op 2ment proce ss of em bedded p roducti on pe ri phe ry interface driver .Aut hor us ed the ARM 9series chi p S3C2410and USB ma in controlle r ISP1161A1,de signed an USB driver p r ogram ,provided the ha rd ware connect m ethod and t he soft wa re de sign proce ss,finally,we can read and write US B device messag e under L inux operati ons system.Ke y wo rd s: Embedded syst em; AR M; USB int e rface 在现代社会,嵌入式系统逐渐深入到人们生活的方方面面,各类嵌入式系统产品之间往往通过某种接口进行交互或数据传递。