超声电机驱动信号源的ASIC设计
- 格式:pdf
- 大小:208.00 KB
- 文档页数:4
设计和实施一个基于CPLD 的SVPWM 的ASIC 交流电机驱动变速控制系统电机工程学系,技术民心研究所,新竹,台湾,中华民国在本文中,我们提出了一个SVPWM 的ASIC 的交流电机驱动变速控制的设计和执行,采用Altera 的FLEXlOKlOOA CPLD 器件。
给出的dq 轴从EPROM 查找表正弦参考,该ASIC 可以产生交替反转开关PWM 序列来控制电机的转速。
在PWM 序列的烧成时间是开关周期的函数,DC 总线电压、和参考矢量的分量的电压。
功能的计算是简单的,因此可以很容易地进行数字硬件的扩展。
仿真和实验结果能显示所提出的SVPWM ASIC 的性能。
关键词:SVPWM ,CPLD 控制ASIC 。
一、引言在交流马达驱动器的变速控制,利用空间矢量脉宽调制(SVPWM)的计划已被广泛使用,因为它可以得到更好的谐波性能和校准,以数字控制技术和其他的PWM 方法相比。
数字硬件实现电机控制器一直是最近的吸引力,因为它可以减少系统元件数量和降低软件投资。
随着超大规模集成电路技术,复杂可编程逻辑器件(CPLD)和现场可编程门阵列(FPGA)的进展已引起广泛关注,由于其可编程硬接线功能,更短的设计周期,并为数字系统实现比其它数字逻辑硬件更高的密度。
虽然在文献中空间矢量PWM 控制的ASIC 使用的FPGA 三相PWM 逆变器的实现并不缺乏,在本文中,我们用一个不同的方法设计并实现了基于CPLD 的SVPWM 的ASIC ,其中的烧成时间来产生PWM 波形的计算是简单的,并且因此可以容易地进行的,采用一个Altera FLEX EPF IOKIOOA 装置。
二、空间矢量PWM 方案的原理用于设计ASIC 的空间矢量脉宽调制方案的原理说明如下。
首先,对于星形连接的负载。
与中性点不接地的三相PWM 逆变器,如图1,我们可以写00a an n v v v =+ (1)图1、PWM 反相器电路与星形连接的电动机的负荷00b bn n v v v =+ (2) 00c cn n v v v =+ (3)其中V a0,V BO ,和V c0,是相对于地面的三相电压,V an ,V BN 和V CN 都是三相电压相对于所述电机的中性点和V N0是中性点相对于到地面的电压。

基于NiosⅡ的超声电机驱动控制电路吕存璞;叶明;姚志远【摘要】针对直线超声电机的特点,设计了一种以FPGA为核心、基于SOPC技术和NiosⅡ软核处理器的新型超声电机驱动控制器,以控制直线型超声电机的速度和位移.该驱动控制器把CPU、DDS模块以及光栅反馈计数模块都集成在一片FPGA 中,具有电子元件使用少,功耗低,易修改、易升级等特点,为超声电机的各种运动平台提供了一个良好的闭环控制系统.【期刊名称】《电子设计工程》【年(卷),期】2014(022)002【总页数】4页(P88-90,94)【关键词】超声电机;闭环控制系统;SOPC技术;NiosⅡ软核处理器【作者】吕存璞;叶明;姚志远【作者单位】南京航空航天大学机械结构强度与振动国家重点实验室,江苏南京210016;南京航空航天大学机械结构强度与振动国家重点实验室,江苏南京210016;南京航空航天大学机械结构强度与振动国家重点实验室,江苏南京210016【正文语种】中文【中图分类】TN7超声电机是一种新型微特电机,其工作原理是通过压电材料的逆压电效应,使定子在超声频段微幅振动,依靠摩擦将振动转换成动子的旋转(直线)运动。
超声电机具有体积小,重量轻、结构紧凑、响应快、无电磁干扰等优点,在航天宇航和军事装备等领域有着广泛的应用前景[1]。
近些年来,我国在超声电机控制方面,提出了一些控制理论,并搭建了一些用于超声电机驱动的实际驱动与控制电路。
2010年,薛雯玉硕士研究了基于DSP芯片的超声电机驱动控制器,但驱动电路仍以传统的模拟电路为主,精度不高,不能实时的调频、调相。
2011年,孙霖硕士研究了基于DSP/FPGA的超声电机驱动控制器,利用DDS技术产生数字正弦波,虽然提高了精确度和实时性,但是浪费了很多芯片的逻辑资源,也不利于驱动控制电路的小型化。
本文使用Altera公司的EP3C40Q240C8芯片设计了一种以FPGA为核心、基于SOPC技术和NiosⅡ软核处理器的新型超声电机驱动控制器。

超声波电机推挽式驱动电源的设计制作
林星陵;陈建毅
【期刊名称】《机械工程师》
【年(卷),期】2015(000)003
【摘要】超声波电机的工作原理及其驱动控制方式不同于传统的电磁电机。
针对超声波电机的驱动特点和要求,本文运用推挽式逆变电路设计制作了一套简单实用的超声波驱动电源,该电源输出频率、输出电压都可在较宽的范围内调整。
实际测试结果表明该电源性能稳定,能够满足两相或单相超声波电机的驱动要求,达到预期目标。
【总页数】3页(P96-98)
【作者】林星陵;陈建毅
【作者单位】厦门城市职业学院,福建厦门 361008;厦门城市职业学院,福建厦门 361008
【正文语种】中文
【中图分类】TN35
【相关文献】
1.超声波电机谐振升压式驱动电源的研究与设计 [J], 翁志刚;洪尚任;林华;刘宏伟
2.超声波电机推挽式驱动电路研究 [J], 张文宇;李弘炬;王秀玲
3.驱动超声波电机的推挽式变换器工作过程分析 [J], 史敬灼;王海彦
4.基于功率放大器的超声波电机驱动电源 [J], 谢智阳;周永德;叶永玖
5.基于DDS超声波电机驱动电源系统的研究 [J], 祁润田; 赵建光; 任卫东
因版权原因,仅展示原文概要,查看原文内容请购买。
高性能超声电机驱动及控制电路的研制摘要介绍了一种高性能的超声电机驱动及控制电路。
该电路使用直接数字频率全成器作为信号源,通过高压运放将信号放大到峰-峰值为250,用于驱动超声电机;借助温度传感器采集电机温度变化,利用计算机实时监控超声电机的运行。
关键词超声电机直接数字频率合成器温度传感器高压运放超声电机是一种基于压电陶瓷逆压电效应的新型电机。
与一般电磁电机相比,超声电机能直接输出低转速大力矩,且瞬态响应快可达量级、定位精度高可达量级,非常适合取代传统的伺服电机及步进电机。
目前超声电机已广泛应用于照相机及摄像机的自动调焦系统,而且在精密仪器以及航空航天领域也有许多应用。
尽管超声电机具有很多优点,但由于超声电机对于驱动信号有着较高的要求,所以目前国内外开发的超声电机的驱动及控制电路普遍存在电路体积大、控制性能单一等问题。
大多数超声电机的控制特性研究还是基于与超声电机配套的普通驱动电路,难以利用计算机方便地进行超声电机的控制特性研究。
针对上述问题,应用目前市面上流行的芯片9850和高压运放08开发出了一种高性能的超声电机驱动及控制电路。
该电路可以通过串行接口用教育处机实施控制和参量采集,并且信号的频率及相位控制精度高;可以在温度传感器的控制下实现信号频率的自动调节,同时电路中还预留了4路模拟、数字通用传感器接口。
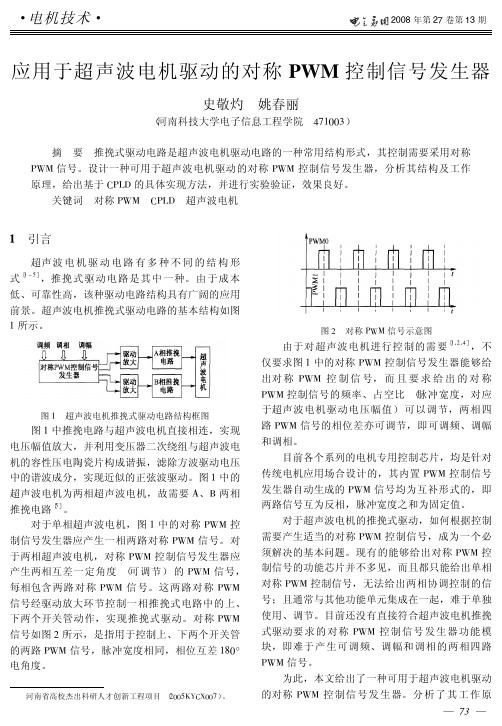
1超声电机驱动及控制电路的工作原理由超声电机的工作机理[1]可知,大部分超声电机的运行需要相关的驱控制电路提供两路频率相同、相位差为90度或可调、频率为20~100、输出信号峰-峰值为100~350、功率为01~10的交变信号。
此外,由于超声电机的最佳工作频率是由系统的机械共振频率决定的,而以压电元件为主的振动系统的共振频率会随着外界参数如温度、预压力等的改变发生变化,因此一款好的超声电机驱动及控制电路必须能够很好地对系统共振频率的变化实施跟踪,从而确保电机的稳定运行。
第31卷第3期2009年9月湖北大学学报(自然科学版)Journal of Hubei University (Natural Science )Vol.31 No.3 Sept.,2009 收稿日期:2008211214基金项目:国家自然科学基金项目(50777065)资助作者简介:狄文宁(19822 ),男,硕士文章编号:100022375(2009)0320260204一种实用超声马达驱动电路的设计和制作狄文宁1,顾豪爽1,罗来慧2,陈景2,赵祥永2,罗豪甦2(1.湖北大学铁电压电材料与器件省重点实验室,湖北武汉430062;2.中国科学院上海硅酸盐研究所,上海200050)摘要:超声波马达是一种借助摩擦传递弹性超声波振动以获得动力的驱动结构.超声波马达需要专用电源供电,在实验室中只要具有信号发生及放大装置即可满足这个要求,而当马达作为某个装置的部件时,就需要配置专用的可移动电源器.针对实验室利用压电材料所研制的新型超声波马达,设计和制作出了一种专用驱动电路.该驱动电路由干电池提供直流电源,产生频率范围为10-100k Hz ,电压峰峰值为0-180V 可调的超声波信号.实验结果表明,研制的电路性能稳定,能方便地驱动超声波马达,并良好运转. 关键词:超声马达;驱动电路;压电效应;逆压电效应 中图分类号:TM35 文献标志码:A DOI :10.3969/j.issn.100022375.2009.03.0111 引言超声波马达又称超声电机(ult rasonic motor ,简称U SM )是20世纪80年代才诞生的一种全新概念电机种类.超声电机采用与传统的电磁式电机截然不同的全新的原理和全新的结构形式,不需要磁铁和线圈,而利用压电材料的逆压电效应激发某种特定模态的超声振动,定子通过摩擦驱动转子运动,从而获得机械输出的一种驱动器[1].超声波马达的应用是压电陶瓷发展的一个直接结果:利用外加交变电场,使压电陶瓷交变伸缩,超声波马达就是利用压电陶瓷的这种交变伸缩,这种伸缩振动的振幅非常小,所以超声马达要在谐振频率处激发超声波马达的定子振动.虽然超声马达的定子的振幅只有1μm 左右,但是由于超声振动频率一般都在20k Hz 以上,所以超声波马达也可以获得很高的转速.超声电机具有扭矩/质量比大、结构紧凑、低速大扭矩、响应快、换向迅速、无电磁噪声干扰和控制性好等优点,在机器人、精密仪器仪表、医疗器械、航空航天以及新型武器装备等领域有着广泛的应用前景[2].本文针对超声波电机的特点,设计了一套驱动控制电路,利用该驱动系统对所制作的超声波电机进行实验,得到了令人较满意的结果.2 驱动原理简介我们设计的超声电机是利用逆压电效应,逆压电效应是在压电材料的相应部位间加上电压,产生一定的电荷分布,材料会发生相应的形变,在此种压电材料上加上某种特定频率的交变正弦信号,材料就会产生随所加电压的变化规律而变化的机械形变.这种机械形变推动周围介质振动,产生疏密相间的机械波,如果其振动频率在超声范围,这种机械波就叫超声波.第3期狄文宁等:一种实用超声马达驱动电路的设计和制作261 3 超声电机对电路的要求超声电机的应用离不开驱动电路,其特殊的驱动机理要求驱动器必须提供超声频段内的正弦交流电,驱动器通常为DC -AC 型逆变器.驱动电路性能的优劣,不仅关系到超声电机的输出性能,也会影响其应用.对驱动电路而言,超声电机是一个容性负载,因此超声电机驱动电路的设计不同于呈电感性的传统电磁型电机的驱动器设计.超声电机的驱动频率取决于电机定子的共振频率.我们小组所研制的超声马达所采用的压电材料是(1-x )Pb (Mg 1/3Nb 2/3)O 3–x PbTiO 3(PMN T ),(1-y )Pb (Zn 1/3Nb 2/3)O 3–y PbTiO 3单晶和Pb (Zr ,Ti )O 3.用PZT 压电陶瓷材料制作的压电超声马达适用于常温环境,用PMN T 单晶制作的压电超声马达适用于超低温环境(低达77K )[3,4].在经过对压电超声电机的测试之后,我们发现电机定子的谐振频率范围在10-100k Hz.超声电机的驱动频率应选在电机定子电导纳-频率特性的反谐振点附近.图1 输入电压与超声电机转速之间的关系图2 输入电压与输入功率之间的关系图1表明微型压电超声电机的输入电压(电压峰-峰值)越大,转速越大;图2表明微型压电超声电机的输入电压越大,其输入功率也相应增大,因此如果想使超声电机的输出功率增大,就必须提高电压,具体数值取决于超声电机所采用的压电材料的性能,电压过高,会使压电材料破裂;电压过低,电机无法转动[5].不同的超声波电机具有不同的驱动电压工作范围和最佳工作频率.因而,超声波电机驱动电路不仅要能够输出高频高压信号,而且其频率、幅值都应该是可调的.超声电机在实际工作中,必须通过控制电路进行调速.4 超声波电机的驱动电路根据以上压电超声马达的电学特性,我们知道,压电超声马达工作时首先必须在谐振状态下即外电路驱动与定子自身产生谐振,这样超声马达才能正常工作.压电马达的许多特性都与超声电机的谐振密切相关,最突出的一点就是工作时频率的范围比较窄,一般2-3k Hz 左右.图3 驱动电路原理图针对我们小组研制的压电超声的特点,使用Multisim 模拟设计整个电路(如图3).驱动电路正常工作时,VCC 提供整个电路的电源,在实际使用中用干电池来提供直流电.这个电路主要包含4部分模块:信号的产生,信号的移相,功率的放大,信号的输出.信号的产生是由L 1,L 2和C 5组成的振荡回路,振荡电路信号的放大是由一个N PN 共射晶体管Q 6和其他相关元件实现.振荡电路信号的正262 湖北大学学报(自然科学版)第31卷反馈是从放大器的集电极通过一个电容C 2连接回L C 振荡回路,经过放大后,输出单相信号(如图4).将振荡回路产生的初始信号分出一路接入第2个N PN 共射晶体管Q 1之中,对输入信号产生了180度的移相,从而我们得到了两路电压峰峰值相等,相位相差的信号,如图5.图4 振荡电路产生的初始信号图5 振荡电路产生的初始信号为了得到电压峰峰值比较高的超声信号,我们使用了所谓推挽式的逆变电路,即图3中由4对大功率的达林顿管Q 2、Q 3、Q 4、Q 5组成2组信号放大电路(Q 2和Q 5一组,Q 3和Q 4一组).将前面所得到的2路相差为180度的信号用来控制这两组信号放大电路的导通和关断.因此当Q 2和Q 5导通,Q 3和Q 4关断时输出交流电压的正半周;当Q 3和Q 4关断,Q 2和Q 5导通时输出交流电压的负半周.所以Q 2、Q 5和Q 3、Q 4轮流导通时,在小型升压变压器两端就可以得到交流电压信号(图6).另外,为了控制超声电机的正反转,我们使用单刀双掷的开关将输出信号与压电超声电机的定子连接起来,从而实现了超声电机顺时针和逆时针的切换,如图7所示.图6 驱动频率为27k Hz ,电压峰峰值大于170V 的输出信号图7 输出信号与压电超声电机定子的接线方法在理论上设计完电路之后,我们使用Protel 将整个电路模拟设计成结构紧凑、装配元器件方便的印制电路板即PCB 板,如图8所示.因为我们小组设计的一部分微型超声马达只需要小功率的驱动信号(输入电压峰峰值小于60V ),就采用低功率的电子元器件,即图9的电路实物图,还有一部分超声马达要使用大功率的驱动信号(输入电压峰峰值达到160V ),我们采用大功率的电子元器件,所以电路体积要稍大一些,如图10.整个电路的输出电压峰峰值可以通过图3的R 8来进行调节.图8 PCB 板的模似设计图 图9 小功率的驱动电路 图10 大功率的驱动电路第3期狄文宁等:一种实用超声马达驱动电路的设计和制作263 5 结语我们用设计的电路成功地驱动了小组所研制的压电超声电机,运转性能良好,实现了初期的目标,该电路易于起振、工作稳定、安全可靠,是较好的压电超声电机驱动器.参考文献:[1]上羽贞行,富川义朗.超声波马达理论与应用[M].杨志刚,郑学论.上海:上海科学技术出版社,1997:127.[2]赵淳生.超声电机技术与应用[M].北京:科学出版社,2007:123.[3]L uo L H,Zhao C,et al.Cylinder2shaped ultrasonic motors4.8mm in diameter using electroactive piezoelectricmaterials[J].Applied Physics letters,2007,90:052904.12052904.3.[4]Dong S,Wang S,Shen W,et al.A miniature piezoelectric ultrasonic motor based on circular bending vibration mode[J].IEEE/ASM E Transactions on Mechatronics,2000(5):3252330.[5]冯祖勇.PMN T单晶的电致应变特性及其在压电驱动器中的应用研究[D].中国科学院研究生院博士学位论文,上海硅酸盐研究所,2005:1132128.Designing and fabrication of driving circuits for ultrasonic motorsDI Wen2ning1,GU Hao2shuang1,LUO Lai2hui2,CHEN Jing2,ZHAO X iang2yong2,LUO Hao2su2(1.Key Lab of Ferro and Piezoelectric Materials and Devices of Hubei Province,Hubei University,Wuhan430062,China;2.Shanghai Institute of Ceramics,Chinese Academy of Sciences,Shanghai200050,China)Abstract:The ult rasonic motor(U SM)is a new type driving device which get s driving force by mechanical vibrations in t he ultrasonic f requency range.The driving signal of t he single2stator U SM is usually a high f requency AC voltage.In t he laboratory we can provide t he signal by t he signal generator and t he power amplifier.However,when U SM is used as a part of a practical equip ment,a special driving circuit is demanded to drive t he ult rasonic motors.According to t he ult rasonic motors chich were p ropo sed and designed in our laboratory,a novel driving circuit s has been developed and it can generate signal wit h t he f requency ranging f rom10to100k Hz,t he value of Vp2p below180V. Our experimental result s have proven t hat t he circuit s can drive t he U SM to work well convenitently and stably.K ey w ords:driving circuit s;ult rasonic motor;piezoelect ric effect;anti2piezoelect ric effect(责任编辑晏建章)。
一种具有频率自动跟踪功能的超声波电机驱动电源的设计的开题报告项目背景:超声波电机由于其高速、大力矩、高精度等优点,在自动化设备、机器人、航空航天等领域得到广泛应用。
超声波电机驱动电源是超声波电机的重要组成部分,其稳定性和性能直接影响超声波电机的运行效果。
而超声波电机的振荡频率受温度、载荷或外界环境的影响而变化,因此需要设计一种具有自动跟踪功能的超声波电机驱动电源。
项目研究内容:本项目旨在设计一种具有频率自动跟踪功能的超声波电机驱动电源。
具体而言,需要研究以下内容:1. 超声波电机的工作原理、特点和应用场景;2. 目前超声波电机驱动电源的技术现状和不足;3. 频率自动跟踪的原理和方法;4. 基于自动跟踪的超声波电机驱动电源的设计和实现;5. 驱动电源的性能测试和优化。
项目意义:本项目可以提高超声波电机的运动稳定性和精度,使其更好地应用于各种领域。
同时,通过自动跟踪功能的设计,可以减少外界干扰对超声波电机的影响,提高了电机的可靠性和稳定性,为工业自动化和智能化的发展做出贡献。
预期成果:本项目的预期成果包括:1. 对超声波电机和驱动电源技术现状和发展趋势的深入了解和研究;2. 一种具有频率自动跟踪功能的超声波电机驱动电源的设计和实现;3. 驱动电源的性能测试数据和分析报告;4. 给出未来研究方向和应用前景的探讨。
研究方法:本项目采用实验室实验结合计算机模拟的方法,首先通过实验研究超声波电机在不同载荷和温度下的振荡频率变化情况,然后建立数学模型,通过计算机模拟进行分析,最终设计具有自动跟踪功能的驱动电源并进行实验验证。
项目计划:1. 项目启动和背景研究(2个月);2. 实验研究和模型建立(3个月);3. 驱动电源的设计和实现(3个月);4. 驱动电源的性能测试和分析(2个月);5. 结果整理、论文撰写和答辩(2个月)。
预期难点:1. 超声波电机的特殊性质和不确定性给实验研究带来了困难;2. 频率自动跟踪方法的选择和实现需要充分探讨和研究。
基于FPGA 的智能超声马达驱动信号源设计马洪宇1,丁启胜1,褚祥诚2(1.徐州师范大学电气工程及自动化学院,江苏省徐州市221116;2.清华大学材料科学与工程系新型陶瓷与精细工艺国家重点实验室,北京市100084)摘 要:针对超声马达独特的工作原理、特性及其驱动控制需要,设计了基于FPG A (现场可编程门阵列)的采用DDS (直接数字频率合成器)技术实现的超声马达驱动信号源。
给出了DDS 的核心部分及DDS 与单片机的接口设计,两者都采用A ltera 公司FPG A 芯片EP1K100实现。
信号源输出两相正余弦波,且可数字控制频率及相位差。
在时钟频率为60MHz 时,频率分辨率为0.447Hz,最大输出频率为117kHz,相位分辨率为1.406°。
文中给出了在MAT LAB 环境下得到的仿真波形。
关键词:超声马达;信号源;DDS;FPG A 中图分类号:TP211.4;T M359.6收稿日期:2005210219。
基金项目:国家自然科学基金重点项目(50235010)0 引 言超声马达作为一种利用压电陶瓷材料逆压电效应,通过摩擦而产生宏观运动的直接驱动装置,具有低速大转矩、无电磁干扰、响应快、定位准确等电磁电机所无法比拟的优点。
但由于原材料、制造工艺、控制手段单一、马达非线性严重、市场需求等原因,国内尚未规模化生产和大量使用。
而深入开展超声马达模态特性、输出特性、非线性特性等方面的测试,需要建立高性能的超声马达驱动电源。
本文根据超声马达驱动、控制对驱动信号的要求提出以ACEX1K100FPG A (现场可编程门阵列)器件为核心的采用DDS (直接数字频率合成器)技术设计的超声马达驱动信号源。
1 超声马达所需的驱动信号根据超声马达的工作机理,多数超声波电机,尤其是目前发展迅速的行波超声马达需要用超声频段的两相信号经功放后驱动。
即超声马达的运行需要驱动控制电路提供两路频率相同、相位差90、频率20kHz ~100kHz 、输出信号峰2峰值为100~500V 的交变信号,且各种参数可调。