PIC24系列单片机原理与开发
- 格式:pdf
- 大小:4.56 MB
- 文档页数:199
I2C24LC02C读写例程(PIC单片机)I2C 24LC02 C读写例程(PIC单片机)[单片机]发布时间:2008-04-22 10:11:001 I2C总线特点I2C总线最主要的优点是其简单性和有效性。
由于接口直接在组件之上,因此I2C总线占用的空间非常小,减少了电路板的空间和芯片管脚的数量,降低了互联成本。
总线的长度可高达25英尺,并且能够以10Kbps的最大传输速率支持40个组件。
I2C总线的另一个优点是,它支持多主控(multimastering),其中任何能够进行发送和接收的设备都可以成为主总线。
一个主控能够控制信号的传输和时钟频率。
当然,在任何时间点上只能有一个主控。
2 I2C总线工作原理I2C总线上的数据稳定规则,SCL为高电平时SDA上的数据保持稳定,SCL为低电平时允许SDA变化。
如果SCL处于高电平时,SDA 上产生下降沿,则认为是起始位,SDA上的上升沿认为是停止位。
通信速率分为常规模式(时钟频率100kHz)和快速模式(时钟频率400kHz)。
同一总线上可以连接多个带有I2C接口的器件,每个器件都有一个唯一的地址,既可以是单接收的器件,也可以是能够接收发送的器件。
每次数据传输都是以一个起始位开始,而以停止位结束。
传输的字节数没有限制。
最高有效位将首先被传输,接收方收到第8位数据后会发出应答位。
数据传输通常分为两种:主设备发送从设备接收和从设备发送主设备接收。
这两种模式都需要主机发送起始位和停止位,应答位由接收方产生。
从设备地址一般是1或2个字节,用于区分连接在同一I2C上的不同器件。
I2C总线在传送数据过程中共有三种类型信号,它们分别是:开始信号、结束信号和应答信号。
开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
结束信号:SCL为高电平时,SDA由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的IC在接收到8bit数据后,向发送数据的IC 发出特定的低电平脉冲,表示已收到数据。
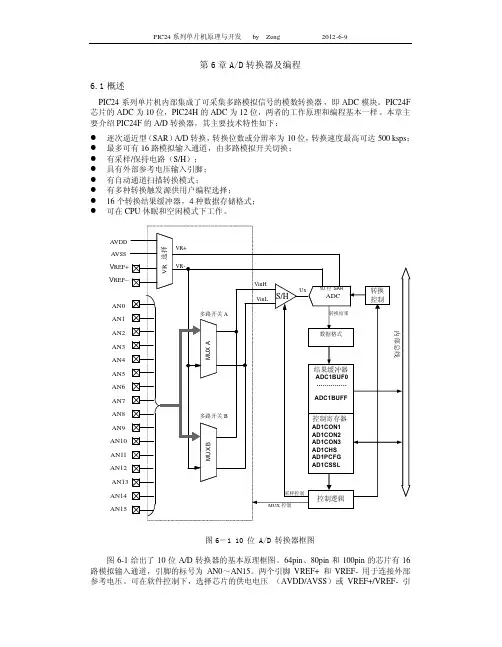
PIC24系列单片机原理与开发第6章AD转换器及编程AD转换器是一种用于将模拟信号转换为数字量的设备,它的主要用途是将模拟量转换为可用于数字控制系统的数字信号。
PIC24系列单片机内置了多路/低速模拟输入AD转换器,可以实现对模拟量的采集、处理和控制。
AD转换器的编程十分复杂,需要明确程序对模拟量的要求,包括采样率、量程、精度等,还需要根据PIC24系列单片机的资源情况,合理配置AD转换器的参数,以便实现模拟量的有效读取。
1)可以多路采样:多路采样可以提高采样精度,在故障时可以减少恢复时间,还可以提高采样率。
2)采样率:根据实际应用需要,调整单片机的时钟频率,来达到最佳的采样率。
3)精度范围:根据实际应用需要,调整AD转换器的精度范围,以保证采集到的数据和处理能力的均衡使用。
4)通道选择:根据实际应用,选择多路采样中的其中一路,来使用最佳的采样精度。
第10 章输入捕捉、输出比较和PWM 控制10.1 概述PIC24F 系列芯片集成了输入捕捉(Input Capture,IC)功能模块和输出比较(OutputComPare,OC)功能模块以及属于输出比较的脉宽调制器(Pulse Width Modulator,PWM)。
这些功能模块是嵌入式测控应用中常用的外设,它们的共同点是都要使用定时器。
输入捕捉像一个“跑表”一样监测输入引脚,捕获输入引脚上事件的发生时刻,可精确地测量事件之间的时间。
常用于脉冲宽度、占空比、周期等参数的测量。
输出比较是将预先设定的值与定时器的计数器进行比较,一旦两者相等便在输出引脚上产生指定的逻辑电平,以实现对外部的控制。
PWM 是输出比较的一种工作模式,用其可方便地实现脉冲宽度调制,可用于D/A 变换等对外部模拟电路进行控制。
10.2 输入捕捉10.2.1 输入捕捉的基本功能输入捕捉属于定时器的应用功能,该功能用来检测外部输入信号发生事件的时刻。
当施加在具有输入捕捉功能引脚上的信号发生边沿跳变(一般可编程指定跳变是上升沿还是下降沿)时,用定时器捕捉到该特定的跳变沿时刻(定时器的计数值),并记录到相应的缓冲器中,同时可产生输入捕捉中断。
通过记录输入信号的的各跳变沿时刻,就可以用软件算出输入信号的周期和脉宽。
例如,对于图10-1 所示的信号,利用单片机的输入捕捉功能,记录了信号 4 个跳变沿的时刻:T1,T2,T3,T4。
显然,对于脉冲宽度测量,只要记录相邻两个不同极性跳变沿的时刻便可获得。
如T2-T1 或T4-T3 为正脉冲宽度,T3-T2 为负脉冲宽度。
若要测量周期,利用捕捉的两个相邻两个同极性跳变沿的时刻便可获得信号的周期,如T3-T1 或T4-T2。
输入捕捉的另一个用途是配合输出比较来延时。
例如,当需要在一个外部事件发生并延时一定时间后,产生一个输出信号来控制某种操作。
这时可利用输入捕捉来记录外部事件的发生时间,将此时间加上所需的延时值送输出比较寄存器,并允许输出比较功能,便可实现这种延时动作功能。