20170715-Buckboost变换器在电阻负载下的小信号传递函数
- 格式:pdf
- 大小:122.40 KB
- 文档页数:3

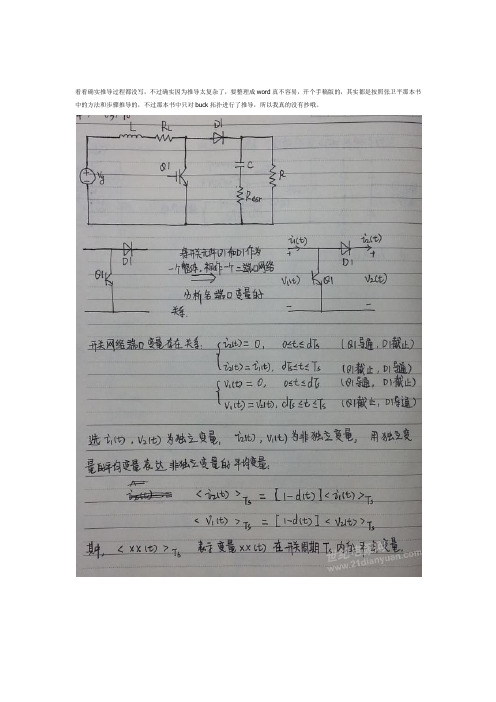
看看确实推导过程都没写,不过确实因为推导太复杂了,要整理成word真不容易,开个手稿版的,其实都是按照张卫平那本书中的方法和步骤推导的,不过那本书中只对buck拓扑进行了推导,所以我真的没有抄哦。
由上面的两个式子就可以推导出Gvd(s)和Gid(s),过程就略过了,直接给出结果:而Gvg(s)和Gig(s)的推导则令交流小信号等效电路中d(s)微变量为零,即涉及到的电压源短路,电流源开路,同样根据变压器两边电压电流的关系可列出两个式子基本上,CCM模式的boost主回路Gvd(s)均可以套用这个公式,大家可以结合自己接触过的项目用mathcad绘制这个函数的波特图,对于主回路的传递函数其实有四个式子,这个当然是最关键的,因为是占空比到输出电压的传递函数,关于这个函数主要注意点是:品质因数Qc、ESR造成的零点和右半平面零点,明天再做具体分析。
最后一张图②中的交流小信号等效电路,那个方法不懂,麻烦楼主再讲一下为什么d'(t) < Vo(t) >Ts就分离为那四部分了?我也是按照那个书上《开关变换器的建模与控制》的方法来推导的,我的理解是那种分离方法是针对小信号扰动进行,其实就相当于用d'(t) < Vo(t) >Ts对t求导数,<Vo(t)>Ts指的是开关周期内输出电压的平均值,自然就是Vo了,d`(t)在开关周期内的平均值自然就是D`,该式对时间求一阶导数的话就是那四个分式啦不晓得有没有解释清楚其实你可以看看那本书,我推传递函数的方法和步骤基本都是按照那本书的方法进行的d'(t)<Vo(t)>Ts不就是d(t)<Vo(t)>Ts对时间t 求导了么?,还是说这里的d' 表示的和D‘差不多的意思?其实应该是(1-d(t))<Vo(t)>Ts对时间求导,所以式子中有很多匪夷所思的负号那个d(t)<vo(t)>Ts是平均分量表达式,然后把平均分量分解成直流分量与交流小信号分量之和。
看看确实推导过程都没写,不过确实因为推导太复杂了,要整理成word真不容易,开个手稿版的,其实都是按照张卫平那本书中的方法和步骤推导的,不过那本书中只对buck拓扑进行了推导,所以我真的没有抄哦。
由上面的两个式子就可以推导出Gvd(s)和Gid(s),过程就略过了,直接给出结果:而Gvg(s)和Gig(s)的推导则令交流小信号等效电路中d(s)微变量为零,即涉及到的电压源短路,电流源开路,同样根据变压器两边电压电流的关系可列出两个式子基本上,CCM模式的boost主回路Gvd(s)均可以套用这个公式,大家可以结合自己接触过的项目用mathcad绘制这个函数的波特图,对于主回路的传递函数其实有四个式子,这个当然是最关键的,因为是占空比到输出电压的传递函数,关于这个函数主要注意点是:品质因数Qc、ESR造成的零点和右半平面零点,明天再做具体分析。
最后一张图②中的交流小信号等效电路,那个方法不懂,麻烦楼主再讲一下为什么d'(t) < Vo(t) >Ts就分离为那四部分了?我也是按照那个书上《开关变换器的建模与控制》的方法来推导的,我的理解是那种分离方法是针对小信号扰动进行,其实就相当于用d'(t) < Vo(t) >Ts对t求导数,<Vo(t)>Ts指的是开关周期内输出电压的平均值,自然就是Vo了,d`(t)在开关周期内的平均值自然就是D`,该式对时间求一阶导数的话就是那四个分式啦不晓得有没有解释清楚其实你可以看看那本书,我推传递函数的方法和步骤基本都是按照那本书的方法进行的d'(t)<Vo(t)>Ts不就是d(t)<Vo(t)>Ts对时间t 求导了么?,还是说这里的d' 表示的和D‘差不多的意思?其实应该是(1-d(t))<Vo(t)>Ts对时间求导,所以式子中有很多匪夷所思的负号那个d(t)<vo(t)>Ts是平均分量表达式,然后把平均分量分解成直流分量与交流小信号分量之和。

峰值电流型控制Boost 等效功率级的小信号传递函数
普高(杭州)科技开发有限公司 张兴柱 博士
Boost 变换器在峰值电流型控制下的等效功率级小信号传递函数(CCM ): )
1)(1()1()1()(220n n p p zc a vc vc s Q s s s s G s G ωωωωω++++−′≈′ )1)(1()1)(1()(220
n n p p zc a vg vg s Q s s s s G s G ωωωωω++++′+′≈′ )
1()1()(0p zc out s s R s Z ωω++′≈′ 其中:10F D R R G i vc ′=′,120F F L RT G s vg =′,1
0F R R =′ 11F RC p =ω,L R D a 2′=ω,)5.0(1−′=D m Q c p π,C R c zc 1=ω,s
n T πω= a a D F ωω×′=′22,)]5.0(21[231−′+=c s m D L RT F ,]5.0[22−′+′′=D m RT D L D F c s
n e c S S m +=1,i g n R L
V S ×=
Boost 的峰值电流控制等效功率级小信号传递函数,与Buck 的差别是在控制电压到输出电压这个小信号传递函数中增加了一个右半平面零点,其它的特性很类似,但由于其极点数少了一阶,所以相比于电压型控制而言,它的补偿电路也是比较容易设计的。
1。

Buck变换器是一种常见的开关电源电路,它通过控制开关管的导通时间来实现电压降低和稳定输出的功能。
而在设计和分析buck变换器时,占空比和输出电压传递函数是两个非常重要的参数,它们直接影响着电路的性能和稳定性。
一、占空比占空比是指开关管导通时间与周期的比值,一般以百分比表示。
在buck变换器中,占空比决定了开关管的导通时间和断开时间,进而影响电路的输出电压。
可以通过调节占空比来实现输出电压的调节和稳定。
1.1 作用在buck变换器中,占空比的大小直接决定了电路的输出电压大小。
增大占空比可以提高输出电压,减小占空比可以降低输出电压。
通过控制占空比可以实现对输出电压的精确调节。
1.2 理解在实际设计中,我们需要根据电路的输入电压、输出电压和负载特性来确定合适的占空比。
通常情况下,我们会根据要求的输出电压和输入电压的关系来计算出所需的占空比。
然后根据电路工作状态的要求和稳定性的考虑,可能还需要进一步调整和优化占空比。
1.3 实际应用在实际应用中,我们需要根据具体的需求来设计和选择合适的控制电路和控制算法来实现对占空比的精确控制。
还需要考虑到开关管的导通损耗和电感等元器件的特性,以确保电路的稳定和可靠工作。
二、输出电压传递函数输出电压传递函数描述了输入电压和输出电压之间的关系,它是分析和设计buck变换器的重要工具。
通过输出电压传递函数,我们可以清晰地了解电路的增益特性和稳定性。
2.1 表达输出电压传递函数通常以传递函数的形式表达,它可以描述电路的增益、带宽和相位等重要参数。
通过分析输出电压传递函数,我们可以快速了解电路的频率特性和稳定性。
2.2 影响buck变换器的输出电压传递函数受到电路拓扑结构、控制策略和元器件参数等因素的影响。
对输出电压传递函数的分析和理解可以帮助我们更好地掌握电路的性能和稳定性。
2.3 优化在设计和分析buck变换器时,我们可以根据输出电压传递函数的特性来选择合适的控制策略和参数设计。

Buck 变换器小信号模型
本文为大家介绍Buck 电路电感电流连续时的小信号模型。
Buck 电路电感电流连续时的小信号模型
图1 为典型的Buck 电路,为了简化分析,假定功率开关管S 和D 为理想开关,滤波电感L 为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。
Re 为滤波电容C 的等效串联电阻,R0 为负栽电阻。
各状态变量的正方向定义如下图中所示。
图1 典型buck 电路
s 导通时,对电感列状态方程
s 断开时,D1 续流导通时,状态方程变成
占空比为D 时,一个开关周期过程中,式(1)及式(2)分别持续了DTs 和(1-D)Ts 的时间(Ts 为开关周期),因此,一个周期内电感的平均状态方程为。
基于小信号模型的Boost-PFC控制电路优化设计鲁芳;朱飞翔;吴青坡【摘要】在设计PFC开关电源时,除了追求高功率因数以外,良好的稳定性和动态性能也是至关重要的.在此给出平均电流控制型Boost-PFC功率电路的小信号模型,通过对双环反馈控制电路的分析,用频域法对电流控制环和电压控制环进行反馈综合.通过选择合适的补偿网络、进行合理的零极点配置,来改善电路的特性.使电路保持较好的稳定性和动态性能.在此基础上,使用最优控制理论,对补偿网络的参数进行优化设计,并通过Matlab仿真证明该优化设计可行.【期刊名称】《现代电子技术》【年(卷),期】2010(033)006【总页数】4页(P199-202)【关键词】小信号模型;频域设计;双环控制;优化【作者】鲁芳;朱飞翔;吴青坡【作者单位】海军航空工程学院,山东,烟台,264001;海军航空工程学院,研究生五队,山东,烟台,264001;海军航空工程学院,研究生五队,山东,烟台,264001【正文语种】中文【中图分类】TN712开关电源的高频化、高效化是电源技术发展的方向,其带来的效益是使开关电源装置小型化,轻便化。
但随着开关频率的不断提高,开关损耗,高频电磁干扰增加;同时电路拓扑结构急剧的变化所引起的非线性现象将对系统的稳定性造成影响。
在开关电源的功率因数校正(PFC)领域也存在这些不足,针对这种问题的解决方法通常是研究新的拓扑结构、新的控制方法以及运用多相PFC电路和软开关技术等。
在开关电源的PFC电路中,存在输入电压频率(低频)和开关频率(高频)[1],小信号模型在分析低频交流信号的动态特性上具有广泛的应用,它将非线性系统在静态工作点附近近似为线性系统,实现非线性系统的线性化。
频域设计能够兼顾控制系统的动态特性和噪声抑制,将其用于分析和设计双环反馈控制系统是可行的。
1 Boost-PFC双环控制原理平均电流控制模式下的Boost-PFC原理图如图1所示。
Buck 变换器在电阻负载下的小信号传递函数普高(杭州)科技开发有限公司 张兴柱 博士用等效电源平均法,可获得Buck 变换器在电阻负载和CCM 下的两个等效子电路,分别如图1(b)和图1(c)所示。
其中图1(b )为稳态等效子电路,图1(c )为小信号等效子电路。
)(t oL (t v ggV(ˆs vg )(s oL (c)图1: Buck 变换器和它的等效平均电路模型用图1(b )的稳态等效子电路,可以求出Buck 变换器在电阻负载和CCM 下的稳态关系。
因R R L <<,故在稳态关系中,可将其忽略。
求得的稳态关系为:稳态关系g o MV V =oL L I I = oL g MI I = D M =用图1(c )的小信号等效子电路及下面的求解技巧,可以求出Buck 变换器在稳态工作点上的小信号传递函数,具体的求解过程如下:(A ):只有占空比扰动时的三个小信号传递函数)(s G vd ,)()(s G g id ,)(s G id 求解: 从方程:)(ˆ)()(ˆ)()(ˆ)()(ˆs i s Z s v s G s d s G s voL out g vg vd o ×−×+×= )(ˆ)()(ˆ)()(ˆ)()(ˆ)()()(s i s G s v s G s d s G s ioL g ii g g ig g id g ×+×+×= )(ˆ)()(ˆ)()(ˆ)()(ˆs i s G s v s G s d s G s ioL ii g ig id L ×+×+×= 我们有:0ˆ,0ˆ)(ˆ)(ˆ)(===oL g o vd i vs ds vs G 0ˆ,0ˆ)(ˆ)(ˆ)()(===oL g g g id i vs ds is G 0ˆ,0ˆ)(ˆ)(ˆ)(===oL g d id i vs ds is G图2: Buck 变换器只有占空比扰动时的小信号等效电路所以图1(c )的小信号等效电路可简化为图2所示。
buck传递函数函数名称:buck_transfer()函数功能:计算Buck变换器的输出电压和电流函数参数:Vin:输入电压,单位为V(伏特)Vout:输出电压,单位为V(伏特)Iout:输出电流,单位为A(安培)fsw:开关频率,单位为Hz(赫兹)L:电感值,单位为H(亨利)C:输出电容值,单位为F(法拉)Rload: 负载电阻,单位为Ω(欧姆)返回值:无返回值函数实现:```pythondef buck_transfer(Vin, Vout, Iout, fsw, L, C, Rload): # 计算占空比D = Vout / Vin# 计算开关周期T = 1 / fsw# 计算开关通断时间Ton = D * TToff = (1 - D) * T# 计算平均输出电流和负载电阻上的平均电压Iavg = IoutVload_avg = Iavg * Rload# 计算纹波因子delta_IL = (Vin - Vout) * Ton / Ldelta_Vo = (Iavg * Ton) / (C * (1 - D))# 计算输出纹波电压和纹波电流Vo_rms = ((Vout ** 2 + delta_Vo ** 2) ** 0.5)Io_rms = ((Iout ** 2 + delta_IL ** 2) ** 0.5)# 输出计算结果print("占空比D为:", D)print("开关周期T为:", T, "秒")print("开通时间Ton为:", Ton, "秒")print("断开时间Toff为:", Toff, "秒")print("平均输出电流Iavg为:", Iavg, "安培")print("负载电阻上的平均电压Vload_avg为:", Vload_avg, "伏特")print("输出纹波电压Vo_rms为:", Vo_rms, "伏特")print("输出纹波电流Io_rms为:", Io_rms, "安培")```使用示例:```pythonbuck_transfer(24, 12, 2, 1000000, 0.0015, 0.0001, 10)```输出结果:```占空比D为: 0.5开关周期T为: 1e-06 秒开通时间Ton为: 5e-07 秒断开时间Toff为: 5e-07 秒平均输出电流Iavg为: 2 安培负载电阻上的平均电压Vload_avg为: 20.0 伏特输出纹波电压Vo_rms为: 0.006324555320336759 帕斯卡斯(牛顿/平方米)输出纹波电流Io_rms为: 0.0028284271247461903 安培```。
Buckboost 变换器在电阻负载下的小信号传递函数
普高(杭州)科技开发有限公司 张兴柱 博士
用等效电源平均法,可获得Buckboost 变换器在电阻负载和CCM 下的两个等效子电路,分别如图1(b)和图1(c)所示。
其中图1(b )为稳态等效子电路,图1(c )为小信号等效子电路。
)
(t v g )(t
g
V
(ˆs v
g )(ˆ][
s d
V V g o +)(ˆs oL
图1: Buckboost 变换器和它的等效平均电路模型
用图1(b )的稳态等效子电路,可以求出Buckboost 变换器在电阻负载和CCM 下的稳态关系。
因R R L <<,故在稳态关系中,可将其忽略。
求得的稳态关系为:
Buckboost 变换器在稳态工作点上的小信号传递函数:
222111)(o o zc a g vd s Q s s s D V s G ωωωω+++−′=
)()(,2211)(o o zc vg s Q s s D D
s G
ωωω+++′= 2
221)
1)(1()(o
o zc zL L out s Q s s s D R s Z ωωωω++++′=
)
1()
1()(1
)(222
2)(zp o o g ig in s s Q s D R D s G s Z ωωω+++′== 221311)1)(o o zp g id s Q s s R D V D s G ωωω+++′+=(,2
2211)(o
o zp
ig s Q s s R D D s G ωωω+++′=
2
2111)(o o zc
ii s Q s s D s G ωωω+++′=
其中:D D −=′1,LC D o ′
=
ω,])([122C D R R R D L Q L c o ′
++′=ω,DL R D a 2′=ω L R L zL =
ω,C R C zc 1
=ω,RC zp 1=ω,RC
D zp +=11ω
有两个小信号传递函数,即)()(s G g id ,)()(s G g ii 没有给出,有兴趣的读者,可以作为作业自己去推导。
从Buckboost 变换器在CCM 下的控制占空比对输出电压的小信号传递函数,即
2
22111)(o o zc a g vd s Q s s s D V s G ωωωω+++−′=
)
()(,可以看出,它与Boost 变换器具有类似的动态性能。
在电压型控制时的补偿器设计同样不好补偿,或者说Buckboost 变换器的动态性能不如Buck 变换器好。
幸运的是目前Buckboost 变换器本身的应用非常有限,而其隔离变换器,即反激变换器的应用多在小功率场合,一般都会采用峰值电流型控制策略,所以这种动态难以补偿的问题也可被克服。
用DCM 下的等效电源平均法,可同样求得Buckboost 变换器在DCM 下的稳态关系和小信号传递函数。
它们是:
Buckboost 变换器在DCM 下的稳态关系:
Buckboost 变换器在DCM 下的小信号传递函数(共给出四个):
)1)1()1()(10
p zc a vd vd s s s G s G ωωω′++′−=(
,)11)(10p zc vg vg s s G s G ωω′++≈(,
)11)(10
p zc
out s s R s Z ωω′++≈(,2
)(M R s Z in = 其中:C R C zc 1
=
ω,L M M R a )1(+=′ω,RC
p 21=′ω
M G vg =0,M
K V G o
vd =
0,R R 210=
如果采用三端PWM 开关模型来推导Buckboost 变换器在DCM 下的小信号传递函数,还可以获得第二个左半平面单极点,它的频率是:22])
11(1
[
2M D f s p +=′ω,这个单极点的位置
在π
s
p f f >
′2,DCM 的深度越深,该极点的频率就越高。
正是因为该极点的频率很高,所以
通常在分析时,可以将其忽略。
因而采用等效电源平均法或状态空间平均法求得的Buckboost 变换器在DCM 下的一阶小信号传递函数是可以用来进行动态分析的。
从Buckboost 变换器在DCM 下的控制占空比对输出电压的小信号传递函数,即
)
1)
1()1()(10
p zc a vd vd s s s G s G ωωω′++′−=(,可以看出,它比Buck 变换器在DCM 下的该小信号传
递函数,也增加了一个右半平面的单极点L
M M R
a )1(+=
′ω。
不过当Buckboost 变换器工
作在DCM 时, 这个右半平面单极点的频率一般会较高,对闭环后系统的动态性能影响会较小。
从Buckboost 变换器在DCM 下的小信号输入阻抗,即2)(M
R
s Z in =,可以看出,它与Buckboost 变换器在DCM 下的稳态输入电阻2
M R
R g =
完全相同,这个特性告诉我们,如果将Buckboost 的隔离变换器,即反激电路用作PFC 的主电路时,在其控制电压环采用非常低速(半个电网周期内,电压环的输出电压可看作常数),和将反激变换器的工作模式控制在DCM 时,则输入电流的平均值和输入电压完全同相,因而可以自动实现输入电流的单位功率因数。
当然这种PFC 只能用在较小功率等级的开关电源中。
至此,已经介绍了三个基本DC-DC 变换器在电阻负载下的小信号传递函数,其它还有许多PWM DC-DC 变换器(如各种去磁方式的正激变换器、各种负载下的反激变换器、对称半桥变换器、不对称半桥变换器等等)的小信号传递函数,会在后面结合它们系统的动态小信号介绍时,再来给出。