Buck电路小信号模型及环路设计
- 格式:doc
- 大小:175.50 KB
- 文档页数:5
开关电源的小信号模型及环路设计文章作者:万山明吴芳文章类型:设计应用文章加入时间:2004年8月31日22:9文章出处:电源技术应用摘要:建立了Buck电路在连续电流模式下的小信号数学模型,并根据稳定性原则分析了电压模式和电流模式控制下的环路设计问题。
关键词:开关电源;小信号模型;电压模式控制;电流模式控制引言设计一个具有良好动态和静态性能的开关电源时,控制环路的设计是很重要的一个部分。
而环路的设计与主电路的拓扑和参数有极大关系。
为了进行稳定性分析,有必要建立开关电源完整的小信号数学模型。
在频域模型下,波特图提供了一种简单方便的工程分析方法,可用来进行环路增益的计算和稳定性分析。
由于开关电源本质上是一个非线性的控制对象,因此,用解析的办法建模只能近似建立其在稳态时的小信号扰动模型,而用该模型来解释大范围的扰动(例如启动过程和负载剧烈变化过程)并不完全准确。
好在开关电源一般工作在稳态,实践表明,依据小信号扰动模型设计出的控制电路,配合软启动电路、限流电路、钳位电路和其他辅助部分后,完全能使开关电源的性能满足要求。
开关电源一般采用Buck电路,工作在定频PWM控制方式,本文以此为基础进行分析。
采用其他拓扑的开关电源分析方法类似。
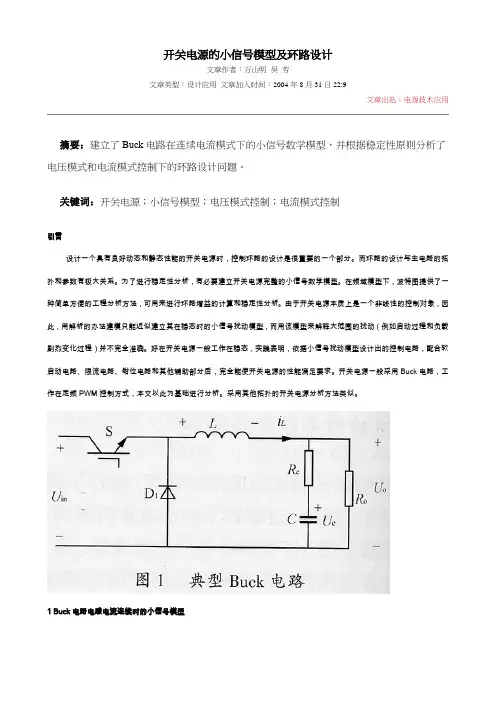
1 Buck电路电感电流连续时的小信号模型图1为典型的Buck电路,为了简化分析,假定功率开关管S和D1为理想开关,滤波电感L为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。
Re为滤波电容C的等效串联电阻,Ro为负载电阻。
各状态变量的正方向定义如图1中所示。
S导通时,对电感列状态方程有L(dil/dt)=Uin-Uo (1)S断开,D1续流导通时,状态方程变为L(dil/dt)=-Uo (2)占空比为D时,一个开关周期过程中,式(1)及式(2)分别持续了DTs和(1-D)Ts的时间(Ts为开关周期),因此,一个周期内电感的平均状态方程为L(dil/dt)=D(Uin-Uo)+(1-D)(-Uo)=DUin-Uo (3)稳态时,=0,则DUin=Uo。
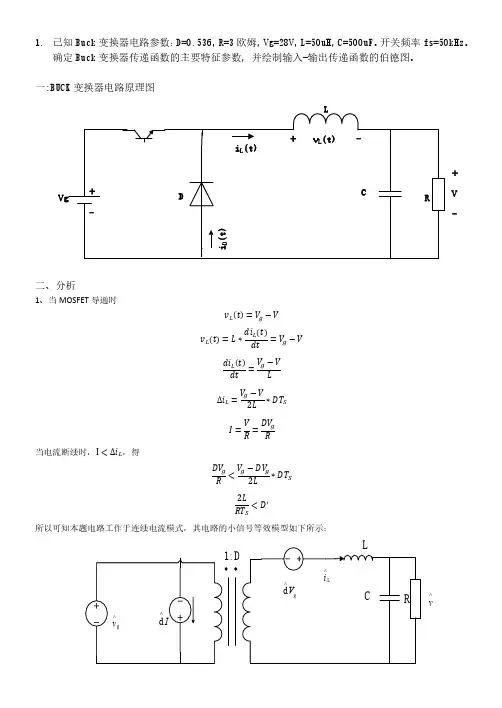
B u c k电路小信号分析 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】1. B u c k 电路小信号线性化交流模型为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=-=+-=)(~)(~)(~)(~)(~)(~)(~)(~)(~)(~o o o t d I t i D t i R t u t i dt t u d C t d V t u t u D dt t i d L L L in L in in L(1-1)2. Buck 电路小信号交流模型等效电路图2-1Buck 电路小信号交流模型等效电路 3. 传递函数()()()()()()⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧++=++===112020s R L LCs V s d s v s R L LCs D s v s v g s v o s d g o g (3-1)谐振频率Hz LC f 3.503210==π --------徐德鸿.电力电子系统建模及控制.机械工业出版社,2005.4. 主电路参数设计(1)输入直流电压in V :100V(2)输出电压o V :50V , 纹波系数:00001≤δ(3)占空比:5.0o ==inV V D (4)负载:Ω=10R(5)功率:W R V P 2502o == (6)开关频率:kHz f s 10=(7)开关管由于是小功率DC-DC 变换器,所以选用功率MOSFET 作为开关器件,MOSFET 的型号选择IRF250(V U DS 200=,A I D 30=,()Ω=085.0on DS R )。
(8)电感电感的大小决定了开关电源主回路处于CCM 还是DCM 模式,由Buck 电路工作于电感电流连续状态下的条件:21D RT L S -≥(4-1) 得:S RT D L 21-≥ (4-2)所以mH L 25.0≥,取mH L 1=(9)电容电容的作用是保持恒定的输出电压,可根据允许的输出电压纹波值来选择电 容的大小:所以F C μ5.62=,取F C μ100=--------[1]裴云庆,杨旭,王兆安.开关稳压电源的设计和应用[M].机械工业出版社,2010.[2]英飞凌公司.IRF250数据手册.[3]巩鲁洪,曹文思.基于BUCK 变换器的建模与设计[J].科学之友,2008.5. 扰动信号占空比扰动:)2sin()(~t f d t d sd π=其中: 005.05.01001=⨯≤d kHz kHz f sd 110101=⨯≤输入电压扰动:)2sin()(~t f u t u su in π=其中: V V u 5.0501001=⨯≤kHz kHz f sd 110101=⨯≤负载扰动:)2sin()(~t f i t i si o π=其中: A A I 05.051001=⨯≤kHz kHz f sd 110101=⨯≤6. 仿真因素电路与小信号模型对比输入电压小扰动)(~t u in占空比小扰动)(~t d →输出电压)(~o t u 纹波等稳态性能负载小扰动7. 仿真结果分析电路与小信号模型对比,模型是否精确?加各种扰动,对输出电压的影响?。
非理想 Buck变换器小信号建模及补偿网络设计摘要:Buck变换器是一种典型的DC/DC变换器,其小信号建模是分析其稳定性和暂态响应的重要手段。
考虑到开关器件及功率元器件的寄生参数对变换器造成的影响,因此针对非理想Buck变换器,在一个周期内开关管导通和关断两种工作状态,建立了连续工作模式的交流等效电路模型;在小信号数学模型基础上,设计反馈控制回路,在仿真控制环路幅频和相频特性基础上,设计补偿网络以提高系统的稳定性和瞬态响应,并通过Saber仿真及实验平台进行验证。
关键词:非理想Buck变换器;小信号建模;反馈控制;补偿网络Small signal modeling and Compensation network design for Non-ideal Buck ConverterWu Jiawang(Shanghai Institute of Space Power-Source, Shanghai)Abstract: Buck converter is a typical DC/DC converter, and itssmall signal modeling is an important means to analyze its stability and transient response. Taking into account the influence of the parasitic parameters of the switching devices and power components on the converter, for non-ideal Buck converters, the switching tube is turned on and off in one cycle, and a continuous working mode of AC is established. Effective circuit model; based on the small-signal mathematical model, design the feedback control loop, and based on the simulation control loop amplitude-frequency and phase-frequency characteristics, design the compensation network to improve thestability and transient response of the system, and verified by Saber simulation and experiment platform.Key words: non-ideal Buck converter; small signal modeling; feedback control; compensation network0引言在卫星电源控制器(PCU)中,充电调节器(BCR)需要具备抗扰动能力,BCR包含Buck、Cuk、Sepic等拓扑[1]。
buck电路小信号模型传递函数Buck电路是一种常见的降压型DC-DC转换器,其小信号模型传递函数是指在小信号条件下,输入电压和输出电压之间的传递函数关系。
在实际应用中,了解Buck电路的小信号模型传递函数对于设计和优化电路具有重要意义。
Buck电路的小信号模型传递函数可以通过对电路进行线性化处理得到。
在小信号条件下,电路中的元件可以被视为线性元件,因此可以使用线性电路分析方法来求解电路的传递函数。
具体来说,可以将Buck电路分为两个部分:输入端和输出端。
输入端包括输入电压源和输入电感,输出端包括输出电感、输出电容和负载电阻。
在小信号条件下,可以将输入电压和输出电压表示为其平均值加上一个小信号分量,即:Vin = Vavg + δVinVout = Vavg + δVout其中,δVin和δVout表示输入电压和输出电压的小信号分量。
根据线性电路分析方法,可以得到Buck电路的小信号模型传递函数为:H(s) = δVout / δVin = -D / (1-D) * 1 / (sLout + Rload + 1 / (sCout))其中,D表示开关管的导通比,Lout表示输出电感的电感值,Cout 表示输出电容的电容值,Rload表示负载电阻的阻值,s表示复频域变量。
从上式可以看出,Buck电路的小信号模型传递函数与电路中的元件参数密切相关。
例如,当输出电感的电感值增大时,传递函数的分母会增大,从而导致传递函数的幅频特性发生变化。
同样地,当负载电阻的阻值增大时,传递函数的分母也会增大,从而导致传递函数的幅频特性发生变化。
在实际应用中,了解Buck电路的小信号模型传递函数可以帮助工程师更好地设计和优化电路。
例如,可以通过调整电路中的元件参数来改变传递函数的幅频特性,从而实现更好的电路性能。
此外,还可以通过仿真和实验验证传递函数的准确性,从而进一步优化电路设计。
Buck电路的小信号模型传递函数是电路设计和优化中的重要概念。
buck电路环路参数设计一、引言在电子工程中,Buck电路是一种常见的电源转换电路,广泛应用于各种电子设备中。
其工作原理是将输入电压的一部分转换成较低的输出电压。
对于Buck电路的设计,环路参数设计是其核心部分,直接影响电路的性能和稳定性。
二、环路参数设计1.电感的选择:电感是Buck电路中重要的元件,它能够抑制电流的波动,同时对交流信号进行过滤。
电感的选取需要考虑电路的工作频率、输入电压、输出电压以及负载变化等因素。
一般来说,电感值越大,电路的抗干扰能力越强,但也会增加电路的体积和重量。
因此,需要根据实际情况进行权衡。
2.电容的选择:电容在Buck电路中扮演着重要的角色,它可以滤除高频噪声,提高电路的稳定性。
电容的选取需要考虑电路的工作频率、输入电压、输出电压以及负载变化等因素。
同时,电容的耐压值也需要考虑,避免因过压损坏电容。
3.电阻的选择:电阻在Buck电路中主要用于调整输出电压和限制电流。
电阻的选取需要考虑电阻值的大小、功率以及电路的工作环境等因素。
电阻值过大,可能导致输出电压波动大,影响电路的性能;电阻值过小,可能导致电路发热严重,影响电路的稳定性。
三、设计实例假设我们设计一个用于手机电池充电的Buck电路,我们需要考虑以下环路参数:输入电压为3.7V,输出电压为3V,工作频率为1MHz,负载变化范围为5%-10%。
根据这些参数,我们可以进行以下设计:1.电感选择:根据工作频率和输入电压,我们选择电感值为5mH。
2.电容选择:由于工作频率较低,我们选择1uF的电容,并确保其耐压值能够承受输入电压和输出电压的叠加。
3.电阻选择:我们选择一个可调电阻,用于调整输出电压,使其在5%-10%的负载范围内保持稳定。
初始时,将电阻调至最大值,然后逐渐减小电阻值,直到达到最佳输出电压。
同时,为了限制电流,我们选择一个适当的限流电阻。
四、结论通过以上设计步骤和方法,我们可以成功地设计出一个性能稳定、体积轻便的Buck电路。
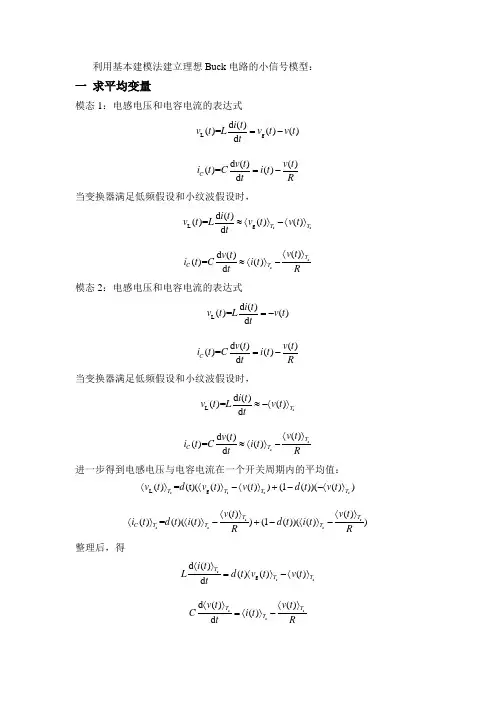
利用基本建模法建立理想Buck 电路的小信号模型:一 求平均变量模态1:电感电压和电容电流的表达式L g d ()()=()()d i t v t Lv t v t t=- d ()()()=()d C v t v t i t Ci t t R=- 当变换器满足低频假设和小纹波假设时,s s L g d ()()=()()d T T i t v t Lv t v t t≈〈〉-〈〉 s s ()d ()()=()d T C T v t v t i t C i t t R〈〉≈〈〉-模态2:电感电压和电容电流的表达式L d ()()=()d i t v t Lv t t=- d ()()()=()d C v t v t i t Ci t t R=- 当变换器满足低频假设和小纹波假设时,s L d ()()=()d T i t v t Lv t t≈-〈〉 s s ()d ()()=()d T C T v t v t i t C i t t R〈〉≈〈〉-进一步得到电感电压与电容电流在一个开关周期内的平均值:s s s s L g ()=(t)(()())(1())(())T T T T v t d v t v t d t v t 〈〉〈〉-〈〉+--〈〉sss s s ()()()=()(())(1())(())T T C T T T v t v t i t d t i t d t i t RR〈〉〈〉〈〉〈〉-+-〈〉-整理后,得ss s g d ()()()()d T T T i t L d t v t v t t 〈〉=〈〉-〈〉sss d ()()()d T T T v t v t Ci t tR〈〉〈〉=〈〉-二 分离扰动g ˆd[+()]ˆˆˆ(())[()][()]d g I i t L D d t V v t V v t t=++-+ ˆˆd[()]()ˆ()d V v t V v t CI i t t R++=+- 合并同类项后,g ˆ()ˆˆˆ()()d()-()d g g dI di t L DV V Dvt V t v t dt t+=-++ ˆˆd d ()()ˆ()()d d V v t V vt C I i t t t R R+=-+- 分离直流项和交流项,g =ˆ()ˆˆˆ()d()-()d g g dILDV V dtdi t L Dv t V t v t t -=+d d ˆˆd ()()ˆ()d V VCI t R v t v t C i t t R =-=-三 线性化g ˆ()ˆˆˆ()d()-()d g di t L Dvt V t v t t=+ ˆˆd ()()ˆ()d v t v t Ci t t R=- 又in ˆˆˆ()=()+()it Di t Id t 则可以得到理想Buck 电路模式下交流小信号等效电路模型:R CL.DV g d (t )^V (t )^⑴vg 2ˆ(s)ˆ(s)=|(s)=0=ˆ()1g vDG d L vs s LC s R++⑵gvg 2ˆ(s)(s)==ˆ()1V vG Ld s s LC s R++⑶开环输入阻抗22s +s+1(s)=1L LC R R Z D RCs + ⑷开环输出阻抗2s(s)=s+1L Z LLCs R+(注:文档可能无法思考全面,请浏览后下载,供参考。

系统建模作业——BUCK电路的建模一.BUCK 电路简介BUCK 电路是一种降压式变换电路,降压变换器输出电压平均值U 0总是小于输出电压U D 通常电感中的电流是否连续,取决于开关频率、滤波电感L 和电容C 的数值。
二.BUCK 电路建模1. BUCK 电路基本结构Va)VVb) c)图1. BUCK 电路基本结构a) Buck 变换器 b)开关处于通态[t ,t+DTs] c)开关处于断态[t+DTs ,t+Ts]2.符号说明1、 输入直流电压(Vg):2、 输出电压(Vo):3、 输入电流(Ig):4、 输出电流(Io):5、 电感电压(VL):6、 电感电流(IL):7、 电容电流(IC):3. Buck 变换器达到稳态时的电压电流关系当Buck 变换器达到稳态时,电感电压为()()()ss L s0L L T I t T I t V t LT +-==(1)并且()()()()sss ss L L L L ss 11d d d t T t DT t T g o T tt t DT v t V t t V t t V t t V D V T T ++++⎡⎤==+=-⎢⎥⎣⎦⎰⎰⎰ (2) 则结合(1)和(2),其稳态电压传输比为:goV D V = (3)若略去开关损耗,则Buck 变换器的输入输出功率平衡有:g g o o V I V I =,得o g DI I =。
4.大信号模型在开关管处于通态时,即时间在[t ,t+DT s ]区间时,电感两段电压为:()()()()L g d d L o I t V t LV t V t t==- (4)通过电容的电流为:()()()()C d d o og V t V t I t CI t t R==- (5)当开关管处于断态时,即时间[t+DT s ,t+T s ]区间时,电感两端电压为:()()()L d d L o I t V t LV t t==- (6)通过电容的电流为:。
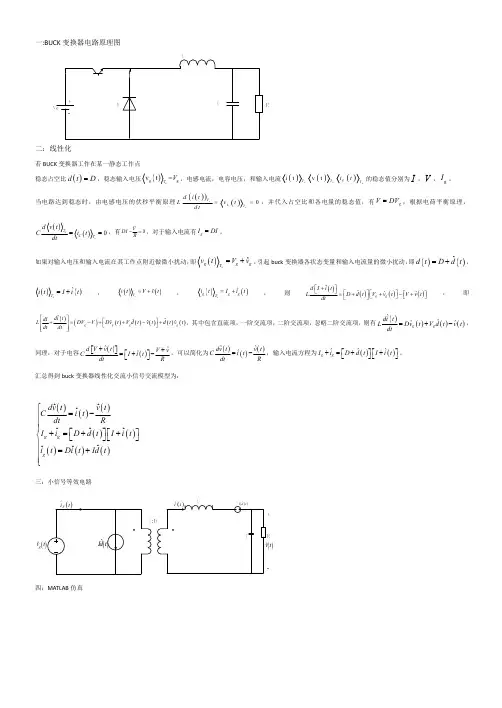
一:BUCK 变换器电路原理图二:线性化若BUCK 变换器工作在某一静态工作点 稳态占空比 dt D ,稳态输入电压sg g v t =T V ,电感电流,电容电压,和输入电流si t v t ssgT T T i t 的稳态值分别为I ,V ,g I 。
当电路达到稳态时,由电感电压的伏秒平衡原理0ssTL T d i t L v t d t,并代入占空比和各电量的稳态值,有g V DV ;根据电荷平衡原理,0ssT C T d v t Ct dt,有0VDI R ,对于输入电流有g I DI 。
如果对输入电压和输入电流在其工作点附近做微小扰动,即ˆsg g g T v t V v ,引起buck 变换器各状态变量和输入电流量的微小扰动,即 ˆd t D dt ,ˆsT i t I it ,ˆsT v t V vt ,ˆsg g g T i t I it ,则 ˆˆˆˆg g d I i t L D d t V v t V v t dt,即ˆˆˆˆˆˆg g g g di t dI L DV V Dv t V d t v t d t v t dt dt ,其中包含直流项,一阶交流项,二阶交流项,忽略二阶交流项,则有 ˆˆˆˆg g di t L Dvt V d t v t dt,同理,对于电容 ˆˆˆd V v t V v CI i t dt R,可以简化为 ˆˆˆdv t v t C i t dt R,输入电流方程为 ˆˆˆg g I i D d t I i t 。
汇总得到buck 变换器线性化交流小信号交流模型为:ˆˆˆˆˆˆˆˆˆg g g dv t v t Ci t dt R I i D d t I i t it Di t Id t三:小信号等效电路ˆg v t t四:MATLAB 仿真。
基于buck电路开关电源的小信号模型及环路设计作者:孙凯博来源:《数码设计》2018年第15期电压模式和电流模式控制下的环路设计问题。
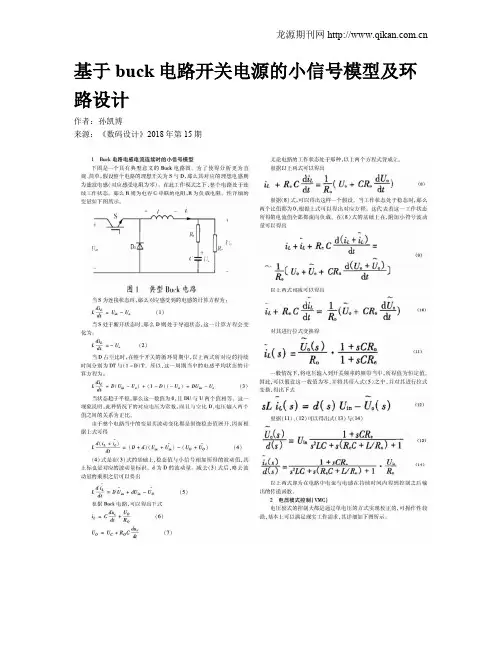
关键词:开关电源;小信号模型;电流模式控制;电压模式控制中图分类号:TN86 ; 文献标识码:A ; 文章编号:1672-9129(2018)15-0076-02Abstract: The small-signal mathematical model of buck circuit in continuous current mode is established. The loop design problem under voltage mode and current mode control is analyzed according to the stability principle.Keywords: switching power supply; small signal model; current mode control; voltage mode control1 Buck电路电感电流连续时的小信号模型下图是一个具有典型意义的Buck电路图。
为了使得分析更为直观、简单,假设整个电路的理想开关为S与D,那么其对应的理想电感则为滤波电感(对应感受电阻为零)。
在此工作模式之下,整个电路处于连续工作状态。
那么R则为电容C串联的电阻,R为负载电阻。
性详细的变量如下图所示。
在整个环路的传递函数表达式一致的情况下,那么就可以进行对电压误差放大器的设计了。
已经具有了一个零点与两个谐振极点,所以,可以将PI调节器即为,。
在这一方程式中,主要是为了消除误差,取值一般为零极点的十分之一以下。
VMC主要存在以下兩方面的弊端:1)由于并不存在电压前馈机制,无法对输入电压的影响进行预测与判断,因而当电压发生变化的时候,其反应较慢,而且所需增益较高。
2)对于电路当中产生的二阶极点并没有对应的补偿,因而其动态响应也存在一定程度的缺失。
Buck 变换器的环路设计1.功率级传递函数R1L 1utQ1buck 变换器功率级电路示意图其传递函数为1)(1121+⋅⋅++⋅⋅+⋅⋅=s C R ESR s C L s C ESR V V out out out i o 分子为一阶微分环节,有一个零点,其转折频率为outzero C ESR f ⋅=π21分母为二阶积分环节, 其阻尼系数12L C R out=ζ,其中ESR R R +=1当1>ζ时,系统为过阻尼状态,有两个不同的极点。
当1=ζ时,系统为临界阻尼状态,有两个相同的极点。
当1<ζ时,系统为欠阻尼状态,有两个共轭的复数极点。
在DCDC 变换器中,为了获得较高的效率,会尽可能的减小R 的值,所以通常系统都是处在欠阻尼状态。
102103104105-40-2020102103104105-200-150-100-50典型的buck 变换器功率级幅频和相频特性曲线。
参数:Cout=100uF ,L1=2.2uH ,ESR=1m Ω,R1=10m Ω在功率级的传函中,有一个由ESR 和Cout 构成的零点。
当ESR 比较小时,幅频曲线在转折频率后会以-40db/dec 衰减,相频曲线也会由0deg 急剧的下降为-180deg 。
在控制回路的环路补偿中就必须增加额外的相位超前补偿,否则不能满足要求的相位裕度。
当ESR 较大时,由ESR 和Cout 组成的零点会抵消到一个极点,控制回路中不需要额外的相位超前补偿,就能满足要求的相位裕度。
下图为ESR=100m Ω(其余参数相同)的幅频和相频特性曲线。
可以看出,其相位最低降到-100deg ,尚有80deg 的相位裕度。
102103104105-30-20-10010102103104105-100-80-60-40-202. PWM 控制级传递函数在电压反馈系统中,PWM 控制器采用固定的三角波与反馈回来的电压比较,控制占空比。
详解:开关电源的小信号建模开关电源的反馈环路设计是开关电源设计的一个非常重要的部分,它关系到一个电源性能的好坏。
要设计一个好的环路,必须要知道主回路的数学模型,然后根据主回路的数学模型,设计反馈补偿环路。
本文想重点介绍下主回路的数学建模方法。
首先来介绍下小信号的分析法。
开关电源是一个非线性系统,但可以对其静态工作点附近进行局部线性化。
这种方法称为小信号分析法。
以一个CCM模式的BOOST电路为例,其增益为:其增益曲线为:其中M和D之间的关系是非线性的。
但在其静态工作点M附近很小的一个区域范围内,占空比的很小的扰动和增益变化量之间的关系是线性的。
因此在这个很小的区域范围内,我们可以用线性分析的方法来对系统进行分析。
这就是小信号分析的基本思路。
因此要对一个电源进行小信号建模,其步骤也很简单,第一步就是求出其静态工作点,第二步就是叠加扰动,第三步就是分离扰动,进行线性化,第四步就是拉氏变换,得到其频域特性方程,也就是我们说的传递函数。
要对一个变换器进行小信号建模,必须满足三个条件。
首先要保证得到的工作点是“静”态的。
因此有两个假设条件:1,一个开关周期内,不含有低频扰动。
因此叠加的交流扰动小信号的频率应该远远小于开关频率。
这个假设称为低频假设2,电路中的状态变量不含有高频开关纹波分量。
也就是系统的转折频率要远远小于开关频率。
这个假设称为小纹波假设。
其次为了保证这个扰动是在静态工作点附近,因此有第三个假设条件:3,交流小信号的幅值必须远远小于直流分量的幅值。
这个称为小信号假设。
对于PWM模式下的开关电源,通常都能满足以上三个假设条件,因此可以使用小信号分析法进行建模。
对于谐振变换器来说,由于谐振变换器含有一个谐振槽路。
在一个开关时区或多个开关时区内,谐振槽路中各电量为正弦量,或者其有效成分是正弦量。
正弦量的幅值是在大范围变化的,因此在研究PWM型变换器所使用的“小纹波假设”在谐振槽路的小信号建模中不再适用。
Buck 变换器小信号模型
本文为大家介绍Buck 电路电感电流连续时的小信号模型。
Buck 电路电感电流连续时的小信号模型
图1 为典型的Buck 电路,为了简化分析,假定功率开关管S 和D 为理想开关,滤波电感L 为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。
Re 为滤波电容C 的等效串联电阻,R0 为负栽电阻。
各状态变量的正方向定义如下图中所示。
图1 典型buck 电路
s 导通时,对电感列状态方程
s 断开时,D1 续流导通时,状态方程变成
占空比为D 时,一个开关周期过程中,式(1)及式(2)分别持续了DTs 和(1-D)Ts 的时间(Ts 为开关周期),因此,一个周期内电感的平均状态方程为。
利用根本建模法建立理想Buck 电路的小信号模型:一 求平均变量模态1:电感电压和电容电流的表达式L g d ()()=()()d i t v t Lv t v t t=- d ()()()=()d C v t v t i t Ci t t R=- 当变换器满足低频假设和小纹波假设时,s s L g d ()()=()()d T T i t v t Lv t v t t≈〈〉-〈〉 s s ()d ()()=()d T C T v t v t i t C i t t R〈〉≈〈〉-模态2:电感电压和电容电流的表达式L d ()()=()d i t v t Lv t t=- d ()()()=()d C v t v t i t Ci t t R=- 当变换器满足低频假设和小纹波假设时,s L d ()()=()d T i t v t Lv t t≈-〈〉 s s ()d ()()=()d T C T v t v t i t C i t t R〈〉≈〈〉-进一步得到电感电压与电容电流在一个开关周期内的平均值:s s s s L g ()=(t)(()())(1())(())T T T T v t d v t v t d t v t 〈〉〈〉-〈〉+--〈〉sss s s ()()()=()(())(1())(())T T C T T T v t v t i t d t i t d t i t RR〈〉〈〉〈〉〈〉-+-〈〉-整理后,得ss s g d ()()()()d T T T i t L d t v t v t t 〈〉=〈〉-〈〉sss d ()()()d T T T v t v t Ci t tR〈〉〈〉=〈〉-二 别离扰动g ˆd[+()]ˆˆˆ(())[()][()]d g I i t L D d t V v t V v t t=++-+ ˆˆd[()]()ˆ()d V v t V v t CI i t t R++=+- 合并同类项后,g ˆ()ˆˆˆ()()d()-()d g g dI di t L DV V Dvt V t v t dt t+=-++ ˆˆd d ()()ˆ()()d d V v t V vt C I i t t t R R+=-+- 别离直流项和交流项,g =ˆ()ˆˆˆ()d()-()d g g dILDV V dtdi t L Dv t V t v t t -=+d d ˆˆd ()()ˆ()d V VCI t R v t v t C i t t R =-=- 三 线性化g ˆ()ˆˆˆ()d()-()d g di t L Dvt V t v t t=+ ˆˆd ()()ˆ()d v t v t Ci t t R=- 又in ˆˆˆ()=()+()it Di t Id t 那么可以得到理想Buck 电路模式下交流小信号等效电路模型:R CL.DV g d (t )^V (t )^⑴vg 2ˆ(s)ˆ(s)=|(s)=0=ˆ()1g vDG d Lvs s LC s R++⑵gvg 2ˆ(s)(s)==ˆ()1V vG Ld s s LC s R++⑶开环输入阻抗22s +s+1(s)=1L LC R R Z D RCs + ⑷开环输出阻抗2s(s)=s+1L Z LLCs R+。
开关电源小信号模型1Buck电路电感电流连续时的小信号模型图1为典型的Buck电路,为了简化分析,假定功率开关管S和D1为理想开关,滤波电感L为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。
Re为滤波电容C的等效串联电阻,Ro为负载电阻。
各状态变量的正方向定义如图1中所示。
S导通时,对电感列状态方程有L(dil/dt)=Uin-Uo(1)S断开,D1续流导通时,状态方程变为L(dil/dt)=-Uo(2)占空比为D时,一个开关周期过程中,式(1)及式(2)分别持续了DTs和(1-D)Ts的时间(Ts为开关周期),因此,一个周期内电感的平均状态方程为 L(dil/dt)=D(Uin-Uo)+(1-D)(-Uo)=DUin-Uo(3)稳态时,=0,则DUin=Uo。
这说明稳态时输出电压是一个常数,其大小与占空比D和输入电压Uin成正比。
由于电路各状态变量总是围绕稳态值波动,因此,由式(3)得L[d(il+il’’’’)/dt]=(D+d)(Uin+Uin’’’’)-(Uo+Uo’’’’)(4)式(4)由式(3)的稳态值加小信号波动值形成。
上标为波浪符的量为波动量,d为D的波动量。
式(4)减式(3)并略去了两个波动量的乘积项得L(dil’’’’/dt)=DUin’’’’+dUin-Uo’’’’(5)由图1,又有iL=C(duc/dt)+Uo/R0(6)Uo=Uc+ReC(duc/dt)(7)式(6)及式(7)不论电路工作在哪种状态均成立。
由式(6)及式(7)可得iL+ReC(dil/dt)=1/Ro(Uo+CRo(duo/dt))(8)式(8)的推导中假设Re 式(9)减式(8)得iL+ReC(dil/dt)=1/Ro(Uo+CRo(dUo/dt))(10)将式(10)进行拉氏变换得iL(s)=(Uo(s)/Ro)·[(1+sCRo)/(1+sCRe)](11)(s)=(11)一般认为在开关频率的频带范围内输入电压是恒定的,即可假设=0并将其代入式(5),将式(5)进行拉氏变换得sLiL’’’’(s)=d(s)Uin-Uo’’’’(s)(12)由式(11),式(12)得Uo’’’’(s)/d(s)=Uin[(1+sCRe)/(s2LC+s(ReC+L/Ro)+1](13)iL’’’’(s)/d(s)=[(1+sCRo)/s2LC+s(ReC+L/Ro)+1]·Uin/Ro(14)式(13),式(14)便为Buck电路在电感电流连续时的控制-输出小信号传递函数。
开关电源(Buck电路)的小信号模型及环路设计华中科技大学电气与电子工程学院作者:万山明,吴芳0 引言设计一个具有良好动态和静态性能的开关电源时,控制环路的设计是很重要的一个部分。
而环路的设计与主电路的拓扑和参数有极大关系。
为了进行稳定性分析,有必要建立开关电源完整的小信号数学模型。
在频域模型下,波特图提供了一种简单方便的工程分析方法,可用来进行环路增益的计算和稳定性分析。
由于开关电源本质上是一个非线性的控制对象,因此,用解析的办法建模只能近似建立其在稳态时的小信号扰动模型,而用该模型来解释大范围的扰动(例如启动过程和负载剧烈变化过程)并不完全准确。
好在开关电源一般工作在稳态,实践表明,依据小信号扰动模型设计出的控制电路,配合软启动电路、限流电路、钳位电路和其他辅助部分后,完全能使开关电源的性能满足要求。
开关电源一般采用Buck电路,工作在定频PWM控制方式,本文以此为基础进行分析。
采用其他拓扑的开关电源分析方法类似。
1 Buck电路电感电流连续时的小信号模型图1为典型的Buck电路,为了简化分析,假定功率开关管S和D1为理想开关,滤波电感L为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。
R e为滤波电容C的等效串联电阻,R o为负载电阻。
各状态变量的正方向定义如图1中所示。
图1 典型Buck电路S导通时,对电感列状态方程有L=U in-U o (1)S断开,D1续流导通时,状态方程变为L=-U o (2)占空比为D时,一个开关周期过程中,式(1)及式(2)分别持续了DT s和(1-D)T s的时间(T s为开关周期),因此,一个周期内电感的平均状态方程为L=D(U in-U o)+(1-D)(-U o)=DU in-U o(3)稳态时,=0,则DU in=U o。
这说明稳态时输出电压是一个常数,其大小与占空比D 和输入电压U in成正比。
由于电路各状态变量总是围绕稳态值波动,因此,由式(3)得L=(D+d)(U in+)-(U o+) (4)式(4)由式(3)的稳态值加小信号波动值形成。
开关电源(Buck电路)的小信号模型及环路设计华中科技大学电气与电子工程学院作者:万山明,吴芳0 引言设计一个具有良好动态和静态性能的开关电源时,控制环路的设计是很重要的一个部分。
而环路的设计与主电路的拓扑和参数有极大关系。
为了进行稳定性分析,有必要建立开关电源完整的小信号数学模型。
在频域模型下,波特图提供了一种简单方便的工程分析方法,可用来进行环路增益的计算和稳定性分析。
由于开关电源本质上是一个非线性的控制对象,因此,用解析的办法建模只能近似建立其在稳态时的小信号扰动模型,而用该模型来解释大范围的扰动(例如启动过程和负载剧烈变化过程)并不完全准确。
好在开关电源一般工作在稳态,实践表明,依据小信号扰动模型设计出的控制电路,配合软启动电路、限流电路、钳位电路和其他辅助部分后,完全能使开关电源的性能满足要求。
开关电源一般采用Buck电路,工作在定频PWM控制方式,本文以此为基础进行分析。
采用其他拓扑的开关电源分析方法类似。
1 Buck电路电感电流连续时的小信号模型图1为典型的Buck电路,为了简化分析,假定功率开关管S和D1为理想开关,滤波电感L为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。
R e为滤波电容C的等效串联电阻,R o为负载电阻。
各状态变量的正方向定义如图1中所示。
图1 典型Buck电路S导通时,对电感列状态方程有L=U in-U o (1)S断开,D1续流导通时,状态方程变为L=-U o (2)占空比为D时,一个开关周期过程中,式(1)及式(2)分别持续了DT s和(1-D)T s的时间(T s为开关周期),因此,一个周期内电感的平均状态方程为L=D(U in-U o)+(1-D)(-U o)=DU in-U o(3)稳态时,=0,则DU in=U o。
这说明稳态时输出电压是一个常数,其大小与占空比D 和输入电压U in成正比。
由于电路各状态变量总是围绕稳态值波动,因此,由式(3)得L=(D+d)(U in+)-(U o+) (4)式(4)由式(3)的稳态值加小信号波动值形成。
上标为波浪符的量为波动量,d为D 的波动量。
式(4)减式(3)并略去了两个波动量的乘积项得L=D+dU in-(5)由图1,又有i L=C+(6)U o=U c+R e C(7)式(6)及式(7)不论电路工作在哪种状态均成立。
由式(6)及式(7)可得i L+R e C=(U o+CR o) (8)式(8)的推导中假设R e<<R o。
由于稳态时=0,=0,由式(8)得稳态方程为i L=U o/R o。
这说明稳态时电感电流平均值全部流过负载。
对式(8)中各变量附加小信号波动量得i L++R e C=〔U o++CR o〕(9)式(9)减式(8)得+R e C=(+CR o)(10)将式(10)进行拉氏变换得(s)=(11)一般认为在开关频率的频带范围内输入电压是恒定的,即可假设=0并将其代入式(5),将式(5)进行拉氏变换得sL(s)=d(s)U in-(s) (12)由式(11),式(12)得=U in(13)=·(14)式(13),式(14)便为Buck电路在电感电流连续时的控制-输出小信号传递函数。
2 电压模式控制(VMC)电压模式控制方法仅采用单电压环进行校正,比较简单,容易实现,可以满足大多数情况下的性能要求,如图2所示。
图2中,当电压误差放大器(E/A)增益较低、带宽很窄时,V c波形近似直流电平,并有D=V c/V s(15)d=/Vs(16)式(16)为式(15)的小信号波动方程。
整个电路的环路结构如图3所示。
图3没有考虑输入电压的变化,即假设=0。
图3中,(一般为0)及分别为电压给定与电压输出的小信号波动;K FB=U REF/U o,为反馈系数;误差e为输出采样值偏离稳态点的波动值,经电压误差放大器K EA放大后,得;K MOD为脉冲宽度调制器增益,K MOD=d/ =1/V s;K PWR为主电路增益,K PWR=/d=U in;K LC为输出滤波器传递函数,K LC=。
图3 开关电源的电压模式控制反馈环路图在已知环路其他部分的传递函数表达式后,即可设计电压误差放大器了。
由于K LC提供了一个零点和两个谐振极点,因此,一般将E/A设计成PI调节器即可,K EA=K P(1+ωz/s)。
其中ωz用于消除稳态误差,一般取为K LC零极点的1/10以下;K P用于使剪切频率处的开环增益以-20dB/十倍频穿越0dB线,相角裕量略小于90°。
VMC方法有以下缺点:1)没有可预测输入电压影响的电压前馈机制,对瞬变的输入电压响应较慢,需要很高的环路增益;2)对由L和C产生的二阶极点(产生180°的相移)没有构成补偿,动态响应较慢。
VMC的缺点可用下面将要介绍的CMC方法克服。
3 平均电流模式控制(Average CMC)平均电流模式控制含有电压外环和电流内环两个环路,如图4所示。
电压环提供电感电流的给定,电流环采用误差放大器对送入的电感电流给定(V cv)和反馈信号(i L R s)之差进行比较、放大,得到的误差放大器输出V c再和三角波V s进行比较,最后即得控制占空比的开关信号。
图4中R s为采样电阻。
对于一个设计良好的电流误差放大器,V c不会是一个直流量,当开关导通时,电感电流上升,会导致V c下降;开关关断,电感电流下降时,会导致V c上升。
电流环的设计原则是,不能使V c上升斜率超过三角波的上升斜率,两者斜率相等时就是最优。
原因是:如果V c上升斜率超过三角波的上升斜率,会导致V c峰值超过V s的峰值,在下个周波时V c和V s就可能不会相交,造成次谐波振荡。
图4 开关电源平均电流模式控制示意图采用斜坡匹配的方法进行最优设计后,PWM控制器的增益会随占空比D的变化而变,如图5所示。
图5 PWM控制器增益与占空比变化关系图当D很大时,较小的V c会引起D较大的改变,而D较小时,即使V c变化很大,D的改变也不大,即增益下降。
所以有d=D/V s(17)不妨设电压环带宽远低于电流环,则在分析电流环时V cv为常数。
当V c的上升斜率等于三角波斜率时,在开关频率f s处,电流误差放大器的增益G CA为G CA=G CA(V o/L)R s=V s f s(18)G CA=/(R s)=V s f s L/(U o R s)(19)高频下,将式(14)分子中的“1”和分母中的低阶项忽略,并化简,得(s)=(20)由式(17)及式(20)有==(21)将式(19)与式(21)相乘,得整个电流环的开环传递函数为·=(22)将s=2πf c代入上式,并令上式等于1时,可得环路的剪切频率f c=f s/(2π)。
因此,可将电流环等效为延时时间常数为一个开关周期的纯惯性环节,如图6所示。
图6 电流环的传递函数示意图显然,当电流误差放大器的增益G CA小于最优值时,电流响应的延时将会更长。
G CA中一般要在f s处或更高频处形成一个高频极点,以使f s以后的电流环开环增益以-40dB/dec的斜率下降,这样虽然使相角裕量稍变小,但可以消除电流反馈波形上的高频毛刺的影响,提高电流环的抗干扰能力。
低频下一般要加一个零点,使电流环开环增益变大,减小稳态误差。
整个环路的结构如图7所示。
其中K EA,K FB定义如前。
可见相对VMC而言(参见图3),平均CMC消除了原来由滤波电感引起的极点(新增极点f s很大,对电压环影响很小),将环路校正成了一阶系统,电压环增益可以保持恒定,不随输入电压V in而变,外环设计变得更加容易。
图7 电压外环反馈环路图4 峰值电流模式控制(Peak CMC)平均CMC由于要采样滤波电感的电流,有时显得不太方便,因此,实践中经常采用一种变通的电流模式控制方法,即峰值CMC,如图8所示。
电压外环输出控制量(V c)和由电感电流上升沿形成的斜坡波形(V s)通过电压比较器进行比较后,直接得到开关管的关断信号(开通信号由时钟自动给出),因此,电压环的输出控制量是电感电流的峰值给定量,由电感电流峰值控制占空比。
图8 峰值电流模式控制示意图峰值CMC控制的是电感电流的峰值,而不是电感电流(经滤波后即负载电流),而峰值电流和平均电流之间存在误差,因此,峰值CMC性能不如平均CMC。
一般满载时电感电流在导通期间的电流增量设计为额定电流的10%左右,因此,最好情况下峰值电感电流和平均值之间的误差也有5%,负载越轻误差越大,特别是进入不连续电流(DCM)工作区后误差将超过100%,系统有时可能会出现振荡现象。
在剪切频率f c以下,由图6可知平均CMC 的电流环开环增益可升到很高(可以>1000),电流可完全得到控制,但峰值CMC的电流环开环增益只能保持在10以内不变(峰值电流和平均值之间的误差引起),因此,峰值CMC 更适用于满载场合。
峰值CMC的缺点还包括对噪音敏感,需要进行斜坡补偿解决次谐波振荡等问题。
但由于峰值CMC存在逐周波限流等特有的优点,且容易通过脉冲电流互感器等简单办法复现电感电流峰值,因此,它在Buck电路中仍然得到了广泛应用。
5 结语采用平均状态方程的方法可以得到Buck电路的小信号频域模型,并可依此进行环路设计。
电压模式控制、平均电流模式控制和峰值电流模式控制方法均可用来进行环路设计,各有其优缺点,适用的范围也不尽相同。