注塑机专用伺服驱动器-20090901
- 格式:doc
- 大小:216.50 KB
- 文档页数:9
台达携“精密伺服油电节能系统”亮相国际橡塑展尽显节能本
色
佚名
【期刊名称】《伺服控制》
【年(卷),期】2009(000)003
【摘要】享誉盛名的第二十三届中国国际塑料橡胶工业展览会(简称2009国际橡
塑展)于2009年5月18至21日在广州中国进出口商品交易会琶洲展馆隆重举行。
作为全球领先的工业自动化解决方案提供商
【总页数】1页(P20-20)
【正文语种】中文
【中图分类】T
【相关文献】
1.台中精机携全电式及精密节能油压射出机亮相东莞塑胶展 [J],
2.台达倾力推出VFD—VJ系列精密伺服油电节能系统 [J],
3.VFD-VJ系列精密伺服油电节能系统 [J],
4.台达倾力推出VFD—VJ系列精密伺服油电节能系统 [J], 无
5.台达节能系统亮相国际橡塑展 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。


A920系列塑机专用控制器系列塑机专用控制器装配维修手册装配维修手册目 录1、A920系列使用规范 (4)2、技术规格 (5)2.1一般规格 (5)2.2具体功能及性能规格 (6)2.3模拟输入输出规格 (7)3、电脑装配 (8)3.17寸、8寸面板安装尺寸图如下: (8)3.210寸面板安装尺寸图如下: (9)3.3A920系列主机安装尺寸图 (10)4、电源部分 (11)4.1电源配置 (11)4.2开关电源安装尺寸: (11)4.2.1 150W 24V 安装尺寸 (11)4.2.2 200W 24V安装尺寸 (12)4.2.3 350W 24V安装尺寸 (13)4.3隔离变压器安装尺寸 (14)4.3.1 T350安装尺寸 (14)4.3.2 T350C安装尺寸 (14)4.3.3 T550安装尺寸 (15)4.3.4 T550C安装尺寸 (15)4.3.5 T350、T550变压器连接 (16)4.3.6 T350C、T550C变压器连接 (16)4.4系统电源分配 (17)5、主机资源说明 (18)5.1A920系列输入输出点定义 (18)5.2A920A I/O接线图 (19)6、开关量输入部分 (20)6.1行程开关 (20)6.2接近开关 (20)6.3机械手输入 (21)6.4欧规机械手 (22)7、方向阀输出 (24)7.1两个方向阀的连接 (24)7.2单点并接多个方向阀的连接 (25)7.3输出点转换为继电器输出方式 (25)8、继电器输出 (26)8.1马达控制部分供电 (26)8.2电机启动 (26)8.3 润滑输出 ...................................................................................................................................................... 27 8.4 机械手输出 .................................................................................................................................................. 28 8.5伺服使能输出 .............................................................................................................................................. 29 9、位置尺连接 ....................................................................................................................................................... 30 9.1 位置尺的连接 .............................................................................................................................................. 30 9.2 压力传感器的连接 ...................................................................................................................................... 31 1010、、比例输出 ......................................................................................................................................................... 32 10.1 比例电流输出 ............................................................................................................................................ 32 10.2 比例电压输出 ............................................................................................................................................ 33 10.3 比例方向电压输出 .................................................................................................................................... 33 1111、、温度控制 ......................................................................................................................................................... 34 11.1 热电偶输入连接 ........................................................................................................................................ 34 11.2 温度控制输出 ............................................................................................................................................ 34 1212、、通讯 ................................................................................................................................................................. 36 12.1 CAN 连接使用规范 ..................................................................................................................................... 36 1313、、安全门 ............................................................................................................................................................. 37 13.1 安全门连接 ................................................................................................................................................ 37 1414、、总装配图总装配图((伺服机伺服机)) . (38)1、A920系列使用规范A920系列主控板是一款装配简单,功能齐全的专用工业控制板,设计中采用了CORTEX-M3主内核芯片,外加多个CPU控制及多组隔离电源供电等先进技术,大大提高了控制的可靠性及性能。
JAND系列交流伺服驱动器用户手册地址:深圳市光明区马田街道金安路佳裕科技创新产业园B栋电话:*************4001890098传真:*************E-mail:*******************前言本手册的所有内容,著作财产权归深圳市杰美康机电有限公司所有,未经深圳市杰美康机电有限公司许可,任何单位或个人不得随意仿制、拷贝、撰抄。
本手册无任何形式的担保、立场表达或其它暗示。
如有本手册所提到的产品的信息,所引起的直接或间接的资料流出,导致利益损失后果,深圳市杰美康机电有限公司与所属员工不承担任何责任。
除此以外,本手册提到的产品及其资料仅供参考,内容如有更新,恕不另行通知。
版权所有,不得翻印。
深圳市杰美康机电有限公司版本编写核准V1.1研发部研发部1目录前言 (1)目录 (2)第一章安全注意事项 (6)1.1接收及安装注意事项 (6)1.2配线注意事项 (6)1.3操作及运行注意事项 (7)1.4维护及检查注意事项 (7)第二章产品介绍 (8)2.1伺服驱动器 (8)2.1.1概述 (8)2.1.2主要特点 (8)2.1.3驱动器规格 (9)2.1.4伺服驱动器型号说明及铭牌内容 (11)2.2伺服电机 (12)2.2.1概述 (12)2.2.2主要特点 (12)2.2.3伺服电机型号说明及铭牌内容 (13)2.3伺服控制系统与主电源回路连接 (15)2.3.1伺服控制系统配线图 (15)2.3.2主电源回路连接 (16)第三章端口说明及配线 (17)3.1伺服驱动器各端口分布 (17)3.2伺服驱动器CN1控制端口说明 (18)3.2.1CN1控制端口定义 (18)3.2.2CN1控制端口连接说明 (20)3.2.3抱闸控制连接示意图 (21)3.3驱动器CN2编码器端口说明 (22)3.3.11394-6P编码器接头说明 (22)23.4驱动器CN3/CN4端口说明 (23)3.5驱动器CN5端口说明 (23)3.6200W/400W电源及电机动力线端口说明 (24)第四章安装说明 (25)4.1安装尺寸 (25)4.2安装使用环境 (27)第五章面板显示说明及设置 (28)5.1面板各部分功能介绍 (28)5.2操作模式的切换流程 (29)5.3状态显示 (30)5.4参数设置写入及保存方法 (31)第六章控制方式及设定 (32)6.1位置控制 (32)6.1.1位置控制接线图 (32)6.1.3位置控制模式参数说明 (34)6.1.4电子齿轮比计算举例 (35)6.2速度控制 (38)6.2.1速度控制接线图 (38)6.2.2速度控制模式参数说明 (39)6.3转矩控制 (40)6.3.1转矩控制接线图 (40)6.3.2转矩控制模式参数说明 (41)第七章试运行及参数调整 (42)7.1试运行 (42)7.1.1运行前检测 (42)7.1.2空载试运行测试 (43)7.2参数调整 (45)7.3手动增益调整 (47)7.3.1基本参数 (47)37.3.2增益切换 (49)7.3.3前馈功能 (50)7.3.4扰动观测器 (51)7.3.5共振抑制 (52)第八章参数与功能 (56)8.1参数一览表 (56)8.2参数说明 (64)8.2.1P00-xx电机及驱动器参数 (64)8.2.2P01-xx主控制参数 (67)8.2.3P02-xx增益类参数 (69)8.2.4P03-xx位置参数 (74)8.2.5P04-xx速度参数 (77)8.2.6P05-xx转矩参数 (79)8.2.7P06-xx I/O参数 (80)8.2.8P08-xx高级功能参数 (83)8.3监控项目一览表 (85)8.4辅助功能 (87)第九章故障分析及处理 (90)9.1故障报警信息表 (90)9.2故障报警原因与处置 (91)第十章通讯 (96)10.1Modbus通讯参数设定 (96)10.2Modbus通讯支持读写参数设定 (96)10.3Modbus通讯协议总概 (98)10.3.1引言 (98)10.3.2通信包 (99)10.3.3从地址和发送请求 (99)10.4功能号 (99)10.4.1功能号03:读保持寄存器 (100)410.4.2功能号06:调整单个寄存器 (101)10.4.3功能号10:调整寄存器 (101)10.4.4数据起始地址 (102)10.5死区时间 (102)10.6例外程序的响应 (103)第十一章特殊功能使用说明 (104)11.1原点复归功能 (104)11.1.1功能描述 (104)11.1.2伺服基本设置与说明 (104)11.1.3原点复归使用注意事项 (105)11.2绝对式编码器使用 (106)11.2.1功能描述 (106)11.2.2基于MODBUS通讯伺服基本设置与说明 (106)11.2.3基于MODBUS通讯绝对数据地址 (107)11.2.4绝对式编码器相关报警处理 (107)11.2.5绝对式编码器电池更换 (107)11.3多圈绝对式原点回归功能 (108)11.3.1功能描述 (108)11.3.2伺服基本设置与说明 (108)11.3.3原点设定 (108)11.3.4原点回归启动 (109)56第一章安全注意事项为防止危害人身及财产安全,请务必遵守以下注意事项,特做以下标记以示区分:危险表示极有可能引发死亡或重大伤害注意表示极有可能引发轻伤或危害财产安全表示禁止实施项1.1接收及安装注意事项危险:1、请依照指定的方式搭配驱动器及电机使用,否则会引起设备损害或引发火灾。
封面作者:ZHANGJIAN仅供个人学习,勿做商业用途XX汽车零部件有限公司注塑模具规范文件名称:注塑模具规范文件编号: ZJSMKF20090901 批准:批准日期:审核:审核日期:拟制:拟制日期:2009-08-08版号: A1 生效日期:2009-09-01版权申明本文部分内容,包括文字、图片、以及设计等在网上搜集整理。
版权为张俭个人所有This article includes some parts, including text, pictures, and design. Copyright is Zhang Jian's personal ownership.用户可将本文的内容或服务用于个人学习、研究或欣赏,以及其他非商业性或非盈利性用途,但同时应遵守著作权法及其他相关法律的规定,不得侵犯本网站及相关权利人的合法权利。
除此以外,将本文任何内容或服务用于其他用途时,须征得本人及相关权利人的书面许可,并支付报酬。
Users may use the contents or services of this article for personal study, research or appreciation, and othernon-commercial or non-profit purposes, but at the same time, they shall abide by the provisions of copyright law and other relevant laws, and shall not infringe upon the legitimate rights of this website and its relevant obligees. In addition, when any content or service of this article is used for other purposes, written permission and remuneration shall be obtained from the person concerned and the relevant obligee.转载或引用本文内容必须是以新闻性或资料性公共免费信息为使用目的的合理、善意引用,不得对本文内容原意进行曲解、修改,并自负版权等法律责任。
海天注塑机伺服报警代码er061一、前言海天注塑机是一种常见的工业设备,用于制造各种塑料制品。
在使用过程中,可能会出现各种故障,其中之一就是伺服报警代码ER061。
本文将详细介绍这个问题的原因和解决方法。
二、什么是海天注塑机伺服报警代码ER061?海天注塑机伺服报警代码ER061是指当伺服驱动器检测到电机电流超过设定值时,系统会自动停止,并显示该错误代码。
这通常意味着电机承受了过大的负载或发生了短路等问题。
三、可能的原因1. 电源问题:如果输入电压不稳定或出现电压波动,可能导致伺服驱动器出现故障。
2. 传感器故障:如果传感器损坏或连接不良,可能导致系统无法准确地检测位置和速度信息。
3. 电机故障:如果电机损坏或连接不良,可能导致系统无法正常运转。
4. 过载问题:如果负载超过了电机所能承受的范围,就会导致伺服驱动器报错。
5. 系统配置错误:如果参数设置不正确或程序错误,也可能导致伺服驱动器出现故障。
四、解决方法1. 检查电源:首先检查输入电压是否稳定,并确保电源接线正确。
如果电源问题得到解决,可以尝试重新启动机器并检查是否仍然出现错误代码。
2. 检查传感器:检查传感器是否损坏或连接不良。
可以使用万用表来测试传感器的电阻和信号输出是否正常。
如果发现问题,需要更换或重新连接传感器。
3. 检查电机:检查电机是否损坏或连接不良。
可以使用万用表来测试电机的绝缘情况和相位输出是否正常。
如果发现问题,需要更换或重新连接电机。
4. 减小负载:如果负载超过了电机所能承受的范围,需要减小负载并重新启动机器。
5. 重新配置系统参数:如果参数设置不正确或程序错误,需要重新配置系统参数或修复程序错误。
五、总结海天注塑机伺服报警代码ER061通常是由于电源问题、传感器故障、电机故障、过载问题或系统配置错误等原因导致的。
要解决这个问题,需要逐一排除这些可能性,并采取相应的措施进行处理。
在处理这个问题时,需要注意安全,避免电击等危险。
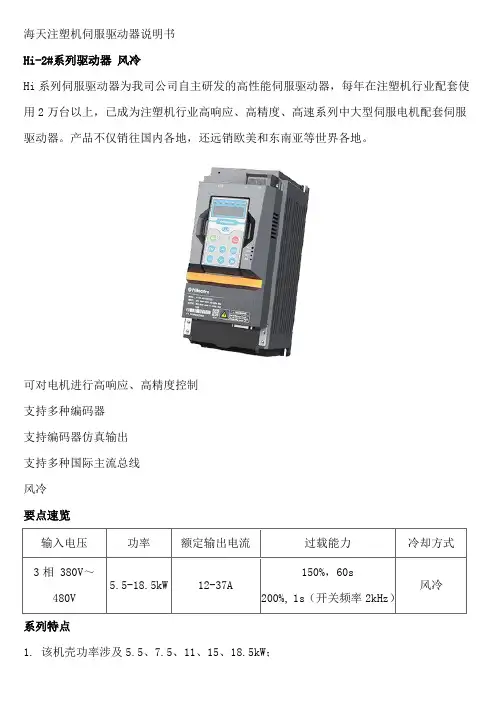
海天注塑机伺服驱动器说明书Hi-2#系列驱动器风冷Hi系列伺服驱动器为我司公司自主研发的高性能伺服驱动器,每年在注塑机行业配套使用2万台以上,已成为注塑机行业高响应、高精度、高速系列中大型伺服电机配套伺服驱动器。
产品不仅销往国内各地,还远销欧美和东南亚等世界各地。
可对电机进行高响应、高精度控制支持多种编码器支持编码器仿真输出支持多种国际主流总线风冷要点速览输入电压功率额定输出电流过载能力冷却方式3相 380V~480V 5.5-18.5kW 12-37A150%,60s200%, 1s(开关频率2kHz)风冷系列特点1. 该机壳功率涉及5.5、7.5、11、15、18.5kW;2. 可对电机进行高响应、高精度控制;3. 支持旋转变压器、海德汉ENDAT多圈绝对值编码器等多种编码器;4. 支持编码器仿真输出;5. 可工作于转矩控制、转速控制、位置控制、压力控制等多个模式;6. 支持Modbus、CAN、EtherCAT等多种国际主流总线;7. 支持模拟量I/O、数字量I/O等多种外围接口;8. 支持手持操作器、PC端上位机、wifi互联网远程连接等多种调试方法;9. 可用于液压注塑机、全电动注塑机、压铸机、铝挤出机,折弯机、伺服冲床等多种机床领域。
Hi-3#系列驱动器液冷/风冷Hi系列伺服驱动器为我司自主研发的高性能伺服驱动器,每年在注塑机行业配套使用2万台以上,已成为注塑机行业高响应、高精度、高速系列中大型伺服电机配套伺服驱动器。
产品不仅销往国内各地,还远销欧美和东南亚等世界各地可对电机进行高响应、高精度控制支持多种编码器系列特点1.该机壳功率涉及18.5、22、30kW;2. 可对电机进行高响应、高精度控制;3. 支持旋变、海德汉ENDAT2.1/2.2、正余弦等编码器;4. 支持第2编码器、增量式编码器输出;5. 可工作于转矩控制、转速控制、位置控制、压力控制等多个模式;6. 支持Modbus、CAN、EtherCAT等多种国际主流总线;7. 支持模拟量I/O、数字量I/O等多种外围接口;8. 支持手持操作器、PC端上位机、wifi互联网远程连接等多种调试方法;9. 可用于液压注塑机、全电动注塑机、压铸机、铝挤出机,折弯机、伺服冲床等多种机床领域。
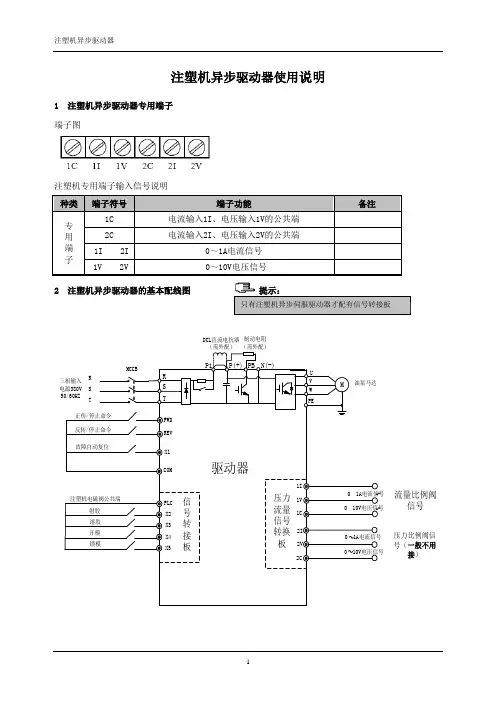
注塑机异步驱动器使用说明
1 注塑机异步驱动器专用端子
端子图
注塑机专用端子输入信号说明
2 注塑机异步驱动器的基本配线图 提示:
DCL直流电抗器制动电阻(需外配)
流量比例阀信号
压力比例阀信号(一般不用
接)
3 功能码介绍
参数表中黑体功能码号为实际现场需要设定的参数,其他的出厂已按标准设定,用户一般不需要更改。
P0组基本功能组
P1组起停控制组
P2组电机参数组
P3组矢量控制组
P5组输入端子组
图1 拐点有效时的设定频率
输入量
X1
X4X2
X3
对应的坐标值
PA 组 简易PLC 及多段速控制组。
海天注塑机伺服控制器故障代码表.doc 错误信息显示数值描述E.bus E.dOH E.dSP E.PrFE.PrrE.hyb E.Enc E.LSF E.OC E.OH E.OH2 E.nOHE.OLE.OL2 E.nOL E.OP E.OS E.PuC E.Set E.UP 18951464752321548303616Error,bus, 串行通讯错误Error,drive-overheat, 电机过热且超过预警时间Error,digital signal processor, 信号处理器故障Error,prohibited rotation forward, 软件限制开关错误(当设定的旋转方向是正向,软件限制开关不起作用)Error,prohibited rotation reverse, 软件限制开关错误(当设定的旋转方向是反向,软件限制开关不起作用)Error,hybrid, 编码器输入板故障Error,encoder,编码器故障(只能用断电复位)Error,load shunt fault, 负载丢失故障Error,overcurrent, 过流故障,瞬时峰值过载Error,overheated, 变频器过热Error, overheat2, 电机电气保护Error,no overheat, 过热故障可以被复位(对E.OH or E.OH2故障有限)53 17 1 10549 39 2Error,overload, 持续过载,使变频器冷却,暂缓通电,冷却时间取决于上一次过载时间。
Error, overload, 当输出频率<3Hz时,变频器过载Error,no overload, 冷却时间到,过载可以被复位Error,oyerpotential, 直流电路过压Error,overspeed, 超速(只能用断电复位)Error,power unit code, 功率器件故障Error,set, 给定选择错误,检查LF.02Error,underpotential,直流电路欠压故障分析显示值意义和分析E.OPError overpotential 1过压故障:直流电路过压可能原因: 1) 输入电压太高:使用变压器; 2) 电源输入电压峰值太高: 使用5%输入电抗器; 3) 制动电阻没有连接; 4) 制动电阻的阻值不正确: 重新估算电阻值; 5) 连接电阻的电缆线受损坏或连接不正确; 6) 变频器接地不良.E.UPError underpotential2欠压故障:直流电路欠压可能原因: 1) 输入电源电压太低或不稳定; 2) 输入接线错误; 3) 输入端变压器太小, 或接线不正确; 4) 所有的输入缺相。
JAND系列交流伺服驱动器用户手册地址:深圳市宝安区留仙三路鸿威工业区A栋2楼电话:*************26502268传真:*************E-mail:*******************前言本手册的所有内容,著作财产权归深圳市杰美康机电有限公司所有,未经深圳市杰美康机电有限公司许可,任何单位或个人不得随意仿制、拷贝、撰抄。
本手册无任何形式的担保、立场表达或其它暗示。
如有本手册所提到的产品的信息,所引起的直接或间接的资料流出,导致利益损失后果,深圳市杰美康机电有限公司与所属员工不承担任何责任。
除此以外,本手册提到的产品及其资料仅供参考,内容如有更新,恕不另行通知。
版权所有,不得翻印。
深圳市杰美康机电有限公司版本编写核准V1.0研发部研发部1目录前言 (1)目录 (2)第一章安全注意事项 (6)1.1接收及安装注意事项 (6)1.2配线注意事项 (6)1.3操作及运行注意事项 (7)1.4维护及检查注意事项 (7)第二章产品介绍 (8)2.1伺服驱动器 (8)2.1.1概述 (8)2.1.2主要特点 (8)2.1.3驱动器规格 (9)2.1.4伺服驱动器型号说明及铭牌内容 (11)2.2伺服电机 (12)2.2.1概述 (12)2.2.2主要特点 (12)2.2.3伺服电机型号说明及铭牌内容 (13)2.3伺服控制系统与主电源回路连接 (15)2.3.1伺服控制系统配线图 (15)2.3.2主电源回路连接 (16)第三章端口说明及配线 (17)3.1伺服驱动器各端口分布 (17)3.2伺服驱动器CN1控制端口说明 (18)3.2.1CN1控制端口定义 (18)3.2.2CN1控制端口连接说明 (20)3.2.3抱闸控制连接示意图 (22)3.3驱动器CN2编码器端口说明 (23)3.3.11394-6P编码器接头说明 (23)23.4驱动器CN3/CN4端口说明 (24)3.5驱动器CN5端口说明 (24)3.6电源及电机动力线端口说明 (25)第四章安装说明 (26)4.1安装尺寸 (26)4.2安装使用环境 (28)第五章面板显示说明及设置 (29)5.1面板各部分功能介绍 (29)5.2操作模式的切换流程 (30)5.3状态显示 (31)5.4参数设置写入及保存方法 (32)第六章控制方式及设定 (33)6.1位置控制 (33)6.1.1位置控制接线图 (33)6.1.2位置控制接线示意图 (34)6.1.3位置控制模式参数说明 (35)6.1.4电子齿轮比计算举例 (36)6.2速度控制 (39)6.2.1速度控制接线图 (39)6.2.2速度控制模式参数说明 (39)6.3转矩控制 (41)6.3.1转矩控制接线图 (41)6.3.2转矩控制模式参数说明 (42)第七章试运行及参数调整 (43)7.1试运行 (43)7.1.1运行前检测 (43)7.1.2空载试运行测试 (44)7.2参数调整 (46)7.3手动增益调整 (48)37.3.1基本参数 (48)7.3.2增益切换 (50)7.3.3前馈功能 (51)7.3.4扰动观测器 (52)7.3.5共振抑制 (53)第八章参数与功能 (57)8.1参数一览表 (57)8.2参数说明 (65)8.2.1P00-xx电机及驱动器参数 (65)8.2.2P01-xx主控制参数 (68)8.2.3P02-xx增益类参数 (71)8.2.4P03-xx位置参数 (75)8.2.5P04-xx速度参数 (78)8.2.6P05-xx转矩参数 (80)8.2.7P06-xx I/O参数 (81)8.2.8P08-xx高级功能参数 (84)8.3监控项目一览表 (86)8.4辅助功能 (88)第九章故障分析及处理 (91)9.1故障报警信息表 (91)9.2故障报警原因与处置 (93)第十章通讯 (100)10.1Modbus通讯参数设定 (100)10.2Modbus通讯支持读写参数设定 (101)10.3Modbus通讯协议总概 (103)10.3.1引言 (103)10.3.2通信包 (103)10.3.3从地址和发送请求 (103)10.4功能号 (104)410.4.1功能号03:读保持寄存器 (104)10.4.2功能号06:调整单个寄存器 (104)10.4.3功能号10:调整寄存器 (105)10.4.4数据起始地址 (106)10.5死区时间 (107)10.6例外程序的响应 (107)第十一章特殊功能使用说明 (108)11.1原点复归功能 (108)11.1.1功能描述 (108)11.1.2伺服基本设置与说明 (108)11.1.3原点复归使用注意事项 (109)11.2绝对式编码器使用 (110)11.2.1功能描述 (110)11.2.2基于MODBUS通讯伺服基本设置与说明 (110)11.2.3基于MODBUS通讯绝对数据地址 (111)11.2.4绝对式编码器相关报警处理 (111)11.2.5绝对式编码器电池更换 (111)56第一章安全注意事项为防止危害人身及财产安全,请务必遵守以下注意事项,特做以下标记以示区分:危险表示极有可能引发死亡或重大伤害注意表示极有可能引发轻伤或危害财产安全表示禁止实施项1.1接收及安装注意事项危险:1、请依照指定的方式搭配驱动器及电机使用,否则会引起设备损害或引发火灾。
A-系列使用说明书版权申明北京和利时电机技术有限公司保留所有权力产品使用说明书内容参照了相关法律基准和行业基准。
您在使用我们的产品时,如对本说明书提供的内容有疑问,请向购买产品的销售人员、或向本公司邮箱、客户服务热线咨询。
北京和利时电机技术有限公司(以下简称和利时电机)保留在不事先通知的情况下,修改本手册中的产品和产品规格参数等文件的权力。
和利时电机不承担由于使用本手册或本产品不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
和利时电机具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
和利时电机具有本使用说明书的著作权,未经许可,不得修改、复制使用说明书的全部或部分内容。
运动中的机器有危险!使用者有责任在机器中设计有效的出错处理和安全保护机制,和利时电机没有义务或责任对由此造成的附带的或相应产生的损失负责。
本使用说明仅面向已购买产品的顾客。
在编写说明内容时,仅针对产品使用者,可能无法满足非产品购买者的疑问,敬请谅解。
目录产品概要产品特性 (1)型号命名 (1)产品组成 (1)产品铭牌 (2)技术特性 (2)外形尺寸及重量 (5)安装和接线使用和储运环境 (6)安装注意事项 (6)电源端子 -接线与配线 (8)编码器反馈连接器CN3 -接线与配线 (9)电机绕组 -接线与配线 (9)接线与配线示意图 (13)输入输出连接器CN2 -接线与配线 (15)通讯连接器CN1 -接线与配线 (21)试运行和操作通电前注意事项 (21)操作和显示 (22)通电试运行 (26)参数汇总和说明 (30)运行和调整运行前检查 (38)增益调整 (38)故障和解决方法 故障显示和解决方法对照表 (39)故障现象和解决方法对照表 (40)1MS 系列伺服驱动器以美国TI 公司最新的32位数字处理芯片(DSP )作为核心控制,采用了先进的全数字电机控制算法,完全以软件方式实现了电流环、速度环、位置环的闭环伺服控制,具备良好的鲁棒性和自适应能力,可配合多种规格的伺服电机,适应于需要快速响应的精密转速控制与定位控制的应用系统,如:数控机床、印刷机械、包装机械、造纸机械、塑料机械、纺织机械、工业机器人、自动化生产线等。
注塑机专用伺服驱动器1 范围本标准规定了注塑机专用伺服驱动器的产品分类和标记、要求、试验方法、标志、使用说明书及包装运输、贮存。
本标准适用于注塑机专用伺服驱动器(以下简称伺服驱动器)。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB 191—2008 包装储运图示标志GB 3797—2005 电气控制设备GB 4208-2008外壳防护等级(IP代码)GB 5080.1-1986设备可靠性试验总要求GB/T 16439—1996 交流伺服系统通用技术条件JB/T 10184-2000 交流伺服驱动器通用技术条件3 分类、标记及定义3.1 产品分类按照注塑机有立式和卧式之分,伺服驱动器分成两类:a)用于立式注塑机的伺服驱动器。
b)用于卧式注塑机的伺服驱动器。
3.2 基本参数伺服驱动器基本参数情况见表1。
表13.3 型号SSV GSV: 200: 220V 400:380VA :扭矩/速度/ 置控制B :内部运行模式220:22KW 075:7.5KWA :搁架式(侧挂)B :基座式(背挂)3.4 定义 3.4.1 转速波动伺服系统稳态运行时,瞬态转速的最大值为n*max ,最小值为n*min ,则:转速波动=**max min **maxminn n 100%nn-⨯+ (1)3. 4.2再生制动通过驱动器的再生单元吸收电动机减速时发出的能量。
4 技术要求4.1 电气机械结构4.1.1 伺服驱动器外壳及结构零件不允许有明显的凹痕、划伤、裂缝、变形、表面涂镀层不允许出现气泡、龟裂、脱落、锈蚀等缺陷。
铭牌和面板上的数字、文字、符号和标志必须清晰端正。
4.1.2 伺服驱动器的接地设计,应将交流公共零电位和保护接地分开设置。
伺服电机和驱动器外壳应设保护接地及标志,伺服系统外壳和其他裸露导体件必须与保护接地端子构成回路,保证有永久良好的导电性,保护接地端子与伺服系统任何裸露导体和整机外壳之间的电阻不得大于0.1Ω。
4.1.3 伺服系统防止触电的保护应符合GB 3797—2005中4.10.1款的要求。
4.1.4 伺服驱动器外壳防护应符合GB 4208—2008中IP00级的要求。
4.2 在下列的海拔和环境空气温度以及环境空气相对湿度条件下,电动机应能额定运行。
4.2.1 海拔不超过1000m。
4.2.2 环境空气最高温度随季节变化,但不超过40℃。
4.2.3 环境空气最低温度为-15℃。
4.2.4 最湿月月平均最高相对湿度为90%,同时该月月平均最低温度不高于25℃。
4.3 电气安全性4.3.1 绝缘电阻伺服驱动器中除不允许做高压试验的电路外,检查试验点对保护接地端之间的绝缘电阻应符合GB/T 16439—1996中4.3.1款的要求。
4.3.2 冲击耐受电压伺服驱动器中的检查试验点对保护接地端之间应能承受GB 3797—2005中4.8.2所规定的冲击耐受电压。
4.3.3 泄露电流当伺服驱动器接入供电电网后,在正常运行时,驱动器的任一电源进线端对保护接地端的泄流电流值应该不大于3.5mA。
4.4 电源适应性按照GB/T 16439—1996规定,当供电电压在额定值的110%和85%及频率在50Hz±1Hz的范围内变化时,伺服驱动器能正常运行。
4.5正、反转速差对于速度闭环的驱动器,仅改变指令电压的极性,空载条件下,电动机在额定转速时的正反转速差为0.01%。
4.6转速波动对于速度闭环的驱动器,空载条件下额定转速时的转速波动为0.01%。
4.7稳速误差伺服系统在产品允许的工作环境温度条件的最低温度和最高温度,在额定转速下,测出两个状态的平均转速的转速差,计算温度变化的稳速误差:在供电电源电压由额定值的85%变化到110%时,测量出电压变化的稳速误差:在电压不变、正常工作气候条件下伺服系统连续运行8 h。
测量出时间变化的稳速误差,均应符合专用技术条件的规定。
4.8转速变化的时间响应伺服系统空载条件下,输入阶跃信号,转速变化的时间响应过程中响应时间为50ms、超调量为2%,建立时间为100ms。
4.9 工作区伺服系统的工作区由连续工作区和间断工作区组成,如图1所示。
图 1 工作区4.10高温连续运行驱动器应能在4.2规定的最高工作环境温度下和5.10规定条件下连续运行48h 。
4.11噪声驱动器的噪声dB (A)限值应为60dB 。
4.12短路保护驱动器应具有短路保护功能。
4.13可靠性驱动器的可靠性指标用平均故障间隔时间(MTBF)衡量,驱动器的MTBF 不低于8000h 。
4.14 伺服系统接口的基本要求4.14.1 速度闭环的伺服系统的模拟输入信号为-10~+10V 直流电压,输入阻抗应不小于10k Ω。
4.14.2 伺服系统应具有下述与数字控制器的基本交换信号:a)准备就绪(输出); b)允许/封锁工作(输入);5 试验方法对驱动器进行试验应视需要带上伺服电动机及电动机所附带的传感器。
试验中所必须使用的调压器、信号给定单元或数字控制器及配电电路等不作为受检查内容。
试验前允许对驱动器参数进行一次调整,全部试验过程中仅允许对每一个可调环节的参数及参数设定值进行适当的调整。
高温连续运行、气候环境等项试验中或试验后驱动器正常运行的检查均在空载条件下进行,检查内容应包括驱动器的输入信号由对应电动机的最低转速到额定转速,系统不应出现故障。
本标准中的各项检查和试验,对于工作气候条件没有特别指出时,一般按GB/T 16439-1996第5条中规定的试验条件下进行。
5.1电气机械结构在光线充足的情况下,采用目测和手感法检查伺服驱动器,应符合4.1.1的要求,保护接地端子与整机外壳之间的电阻用毫欧表测量应符合4.1.2的要求。
5.2 绝缘电阻检查TT注5.2.1 绝缘电阻检查的电路连接见图2。
a. 控制电路的各输入输出端子、及其电源端子和公共端应予以短接,也可以将设计规定不允许经受高电压的控制单元、板和元器件脱开。
b. 通过电容耦合的电路之间不做绝缘电阻检查试验,当需要测试电容耦合的电路与内部设备间的绝缘电阻时,则应暂时用短接线将电容耦合的电路短接。
图2 绝缘电阻和耐压强度试验的电路连接5.2.2 绝缘电阻检查试验用500V准确度为1.0级的兆欧计连接在伺服驱动器电源输入端(图2中①端)与保护接地端(输入端不接入电网,但驱动器内的电源开关、接触器置于接通位置),在施加测试电压1min后读取绝缘电阻的数值,应符合4.3.1的要求。
将伺服驱动器中的直流母线的正负极短接端(图2中②端),与保护接地端之间用兆欧计施加测试电压1min后,读取绝缘电阻的数值,应符合4.3.1的要求。
试验时,应保证接触点有可靠的接触,测试引线间的绝缘电阻应足够大,以保证读数准确。
5.3 耐电压强度试验按GB/T 3797—2005中5.2条规定的方法进行。
试验结果应符合4.3.2的规定。
试验时应将设计规定不经受高压试验的元器件、板脱开(例如电容、压敏电阻等)。
5.4 泄漏电流检查进行泄漏电流检查时,伺服驱动器的交流电源进线侧应有隔离变压器,使伺服系统在空载状态额定转速下运行,试验结果应符合4.3.3的规定。
接线参照图3。
试验时,若不使用隔离变压器,伺服系统要放置在绝缘工作台面上进行。
图3 泄漏电流检查接线图5.5 正反转速差试验空载条件下,伺服系统输入额定正反转速指令(改变极性但不改变量值),测量出电机的正反转速n cw和n ccw,按下式计算正反转速差:正反转速差cw ccw cw ccwn n 100%n n -=⨯+ (2)正反转速差应符合4.5的规定。
5.6 转速波动转速波动在伺服系统的额定转速、空载条件下测试,记录转速波形并找出n *max 和n *min ,按式(1)计算伺服系统的转速波动,结果应符合4.6规定。
5.7 稳速误差试验5.7.1 温度变化的稳速误差伺服系统在空载条件下放置于人工气候箱中,在20℃温度下将电机转速调至n N ,然后将温度调至0℃,热平衡后测出电机转速n 1,再将温度调至40℃,热平衡后测量电机的转速n 2,用下式计算温度变化的稳速误差:温度变化的稳速误差i NNn n 100%n -=⨯ (3)式中:i=1,2。
试验结果均应符合4.7的规定。
5.7.2 电压变化的稳速误差在常温条件下,用调压器调节伺服系统的输入电压,在额定输入电压时将电机转速调至n N 并施加额定功率对应的负载转矩,将伺服系统的输入电压调到额定值的110%,记录这时的实际转速n 1,然后将输入电压调到额定值的85%,再测出电机转速n 2。
用下式计算电压变化的稳速误差:电压变化的稳速误差i NNn n 100%n -=⨯ (4)式中:i=1,2。
试验结果均应符合4.7的规定。
5.7.3 时间变化的稳速误差伺服系统在正常气候环境条件、额定电压下,空载转速调至n N ,维持环境温度变化不超过±2℃,连续运行8h ,每间隔0.5h 测量一次转速n i ,用下式计算时间变化的稳速误差:时间变化的稳速误差i NNn n 100%n -=⨯ (5)式中:i=1,2……16。
取最大偏差值作为试验结果,应符合4.7的规定。
5.8 转速变化的时间响应伺服系统的电机处于空载零速状态下,输入对应额定转速n N 的阶跃信号,记录正阶跃输入的时间响应曲线,读出响应时间、建立时间和瞬态超调并计算出超调量。
在稳定的n N 转速下,输入信号阶跃到零,记录负阶跃进输入的时间响应曲线,读出响应时间、建立时间和瞬态超调并计算超调量。
改变电机转速方向重复上述试验,测得四组数据,均应符合4.8的规定。
5.9 工作区伺服系统的工作区由连续工作区和间断工作区组成,符合4.9的规定。
连续工作区的试验在n0、n1、nN三点进行。
n为接近零速的某一低速,建议选为0.01nN;n 1转速是恒功率输出转速范围中的最低转速点,如果这一点不存在则应选n1=0.75nN。
在上述三点施加对应的负载转矩连续运行,测量电机的温升曲线,稳定温升应符合4.9的规定。
间断工作区的试验,按照专用技术条件规定的短时工作时间和短时允许的过载倍数在n和nN两点测试,结果应符合4.9的规定。
5.10 高温连续运行试验伺服驱动器置于高温箱(室)内,箱(室)内温度升到40℃,达到热平衡后,电机在额定转速下空载运行,并维持箱(室)内温度不低于40℃,输入电源电压按表2的规定循环,连续运行48h,伺服驱动器不应出现故障。