采用CCD的非接触测量中提高精度的一种方法
- 格式:pdf
- 大小:191.42 KB
- 文档页数:4

提高CCD激光自准直测角精度的硬件方法CCD激光自准直是一种广泛应用于工程测量和工业领域的测角技术。
提高CCD激光自准直测角精度有助于提高测量效果和产品质量。
下面将介绍一些可以提高CCD激光自准直测角精度的硬件方法。
1.优化CCD传感器:选择高分辨率、低噪声的CCD传感器可以提高激光自准直测角精度。
对于高精度测角,可以考虑使用全帧传感器,而不是线扫描传感器,全帧传感器可以提供更高的采样率和更精确的数据。
2.提高光学组件质量:激光自准直测角的精度也与光学组件的质量有关。
使用高质量的镜片和滤光片可以提高光学系统的分辨率和色彩准确性。
此外,可通过使用适当的镀膜技术来减少反射和散射,确保光线的传播和接收的准确性。
3.使用更稳定的激光源:激光自准直测角系统的精度受到激光源的稳定性的影响。
使用更稳定的激光源可以减小测量误差。
对于高精度测角,可以考虑使用频率稳定的氦氖激光器或固态激光器。
4.减小系统误差:CCD激光自准直测角系统中常常存在一些系统误差,如非线性误差、光学畸变和基准误差等。
为了减小这些误差,可以对测角系统进行校准和定标,并采用误差补偿方法。
同时,减小系统中可调参数的最小单位,如光学组件的微调装置精度。
5.优化光路设计:光路设计的优化可以改善测量的准确性和稳定性。
通过使用适当的光束夹取和扩展技术、减小光路中的散射和偏振度对齐,可以提高CCD激光自准直测角系统的稳定性和准确性。
6.优化信号处理和算法:对于CCD激光自准直测角系统,信号处理和算法也对测量精度有重要影响。
优化信号处理算法可以提高信噪比和数据分析能力,进而提高测量精度。
总结起来,提高CCD激光自准直测角精度的硬件方法包括优化CCD传感器、提高光学组件质量、使用更稳定的激光源、减小系统误差、优化光路设计以及优化信号处理和算法等。
通过综合应用上述方法,可以提高CCD激光自准直测角系统的精度和稳定性,满足高精度测量的要求。

一种提高CCD测量精度的新方法
王和顺;陈华
【期刊名称】《四川大学学报(工程科学版)》
【年(卷),期】2001(000)005
【摘要】从改变CCD测量系统硬件构成出发,提出了一种提高CCD边缘测量精度的新方法.其实质是用光学方法将输入图像进行展宽,使CCD能够获得更多的边缘信息,再用数学方法对其进行处理,从而恢复被测物体边缘精确位置.
【总页数】3页(P63-65)
【作者】王和顺;陈华
【作者单位】四川大学制造科学与工程学院;四川大学制造科学与工程学院
【正文语种】中文
【中图分类】TH701
【相关文献】
1.一种提高混沌测量精度的新方法 [J], 王金铭;沈东方;方建晓
2.提高激光衍射图样暗纹间距测量精度的一种新方法 [J], 贺国权
3.一种提高电子罗盘航向和姿态测量精度的新方法 [J], 胡超;艾国祥;庞峰;李圣明;马利华
4.提高动态温度和压力测量精度及其可靠性分析的一种新方法 [J], 包家立
5.提高能见度测量精度的一种新方法──参比测量法 [J], 王韬;孙慧洁
因版权原因,仅展示原文概要,查看原文内容请购买。
基于线阵CCD芯片的非接触式测井深度速度计量系统【摘要】:介绍了基于线阵CCD的非接触式测量仪器的原理和在石油测井领域的应用,此仪器可以连续非接式的测量被测物的长度和速度。
此系统主要是基于线阵CCD,线阵CCD是电荷藕合器件图像传感器的简称,它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字图像信号,此数字图像信号经过处理就可得到物体的运动信息,此测量方法主要特点是”非接触”、不受环境限制、测量精度高,适用范围广等。
【关键词】:非接触;长度;速度;测井;CCD引言目前石油测井行业测量测井电缆下井的深度和速度主要是用基于光电编码器的接触式测量方法,这种测量方法最主要的缺点是”接触式测量”,这种测量方法存在着计量轮打滑,电缆晃动引起误差,计量轮磨损,测量误差较大,易受到被测电缆的粗细等物理特性的限制等缺点。
在测试车上装的钢丝电缆目前还没有长度和速度计量装置;现在全国所有的试油队伍都存在着在试油过程中抽汲桶在抽油管中下井深度精度的问题。
为此我们针对石油行业的这些特点,结合当前国外领先的光电测量技术,我们设计了基于线阵CCD芯片的非接触式绞车面板,此仪器可以连续非接式的测量被测物的长度和速度,本仪器的最大特点是”非接触式测量”。
非接触式测量由于其”非接触式”,不受材质和污垢影响,穿透水雾、油雾能力强,智能方向盘别,精度高(重复测量精度可达0.05%),空间和时间分辨率高,不受物体表面形状等影响,安装距离远等特点,可以用于整个石油行业。
一、系统基本组成结构见图1:系统主要由稳定恒流电源、白光源、准直光源系统、成像物镜、线阵CCD、线阵CCD驱动电路、A/D转换、计算机接口系统、计算机模块、调整电路、输入输出接口模块等组成。
1.稳定恒流电源为白光源提供稳定值得电流。
2.白光源:为系统提供测量光源,使目标物得到充分均匀的照明,以保证像CCD像敏平面有足够的照度,用LED灯泡,照度可由电流大小调节。
![一种能提高精度和分辨率的面阵CCD摄像机[实用新型专利]](https://img.taocdn.com/s1/m/3b6c8df6650e52ea54189811.png)
专利名称:一种能提高精度和分辨率的面阵CCD摄像机专利类型:实用新型专利
发明人:萨殊利
申请号:CN01231482.X
申请日:20010717
公开号:CN2552036Y
公开日:
20030521
专利内容由知识产权出版社提供
摘要:本实用新型是一种能提高精度和分辨率的面阵CCD摄像机,适用于检测装置中,非接触式传感器其结构是在现有面阵CCD摄像机基础上增加一组合棱镜将两台面阵CCD摄像机拼接而成,从而可以将面阵CCD摄像机分辨率提高一倍,来满足面阵CCD在应用于测量技术中精度不高缺点。
申请人:萨殊利
地址:100044 北京市北方交通大学科技处
国籍:CN
更多信息请下载全文后查看。
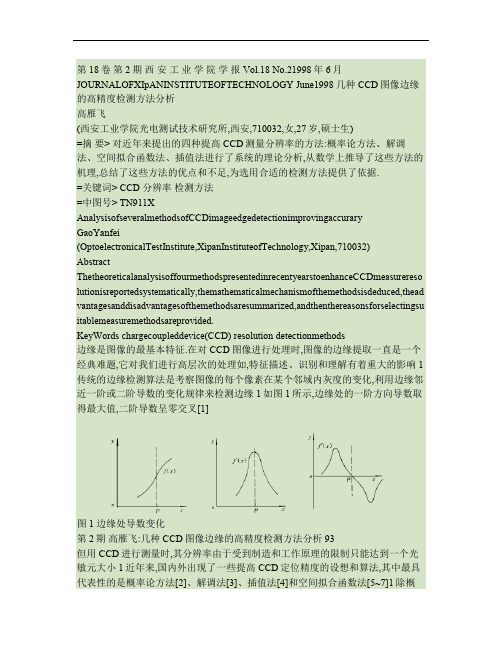
第18卷第2期西安工业学院学报 Vol.18 No.21998年6月JOURNALOFXIpANINSTITUTEOFTECHNOLOGY June1998几种CCD图像边缘的高精度检测方法分析高雁飞(西安工业学院光电测试技术研究所,西安,710032,女,27岁,硕士生)=摘要> 对近年来提出的四种提高CCD测量分辨率的方法:概率论方法、解调法、空间拟合函数法、插值法进行了系统的理论分析,从数学上推导了这些方法的机理,总结了这些方法的优点和不足,为选用合适的检测方法提供了依据.=关键词> CCD 分辨率检测方法=中图号> TN911X AnalysisofseveralmethodsofCCDimageedgedetectionimprovingaccuraryGaoYanfei(OptoelectronicalTestInstitute,XipanInstituteofTechnology,Xipan,710032)Abstract ThetheoreticalanalysisoffourmethodspresentedinrecentyearstoenhanceCCDmeasurereso lutionisreportedsystematically,themathematicalmechanismofthemethodsisdeduced,thead vantagesanddisadvantagesofthemethodsaresummarized,andthenthereasonsforselectingsu itablemeasuremethodsareprovided.KeyWords chargecoupleddevice(CCD) resolution detectionmethods边缘是图像的最基本特征.在对CCD图像进行处理时,图像的边缘提取一直是一个经典难题,它对我们进行高层次的处理如,特征描述、识别和理解有着重大的影响1传统的边缘检测算法是考察图像的每个像素在某个邻域内灰度的变化,利用边缘邻近一阶或二阶导数的变化规律来检测边缘1如图1所示,边缘处的一阶方向导数取得最大值,二阶导数呈零交叉[1]图1 边缘处导数变化第2期高雁飞:几种CCD图像边缘的高精度检测方法分析 93但用CCD进行测量时,其分辨率由于受到制造和工作原理的限制只能达到一个光敏元大小1近年来,国内外出现了一些提高CCD定位精度的设想和算法,其中最具代表性的是概率论方法[2]、解调法[3]、插值法[4]和空间拟合函数法[5~7]1除概率论方法外,其它三种方法的思想都是基于把离散量转化为连续量,再用连续量确定更高精度的点的位置1本文对这四种方法通过从数学上推导其机理,总结它们的优点和不足,为选用合适的检测方法提供依据11 边缘检测问题下面以线阵CCD尺寸测量为例说明边缘检测精度对测量结果的影响1测量原理如图2所示.当工件位于平行光区域时,工件投影到线阵CCD的光敏面上,由于部分光敏单元所接受的光线被工件遮掉,不能进行光积分形成电荷包,所以CCD输出的信号如图3所示1根据以上原理,可得被测工件的尺寸为:l=pn,其中,p=d/B,d为CCD光敏元中心距,B 为光学成像系统放大倍数,n为工件影像所覆盖的光敏元数1图2 线阵CCD尺寸测量示意图图3 线阵CCD输出信号由此可见,工件尺寸测量精度直接由n的计数精度决定,当工件影像和线阵CCD的相对位置如图4所示时,如果不采取其它技术措施,直接对n计数,则在被测物两个边缘都不能确定的情况下,各边大约有一个光敏元的测量误差1对面阵CCD来说,其所成图像的各行、各列都存在着与线图4 工件影像和线阵CCD相阵CCD类似的情况1可见,精确地定位CCD图像的边缘,突破CCD像元中心距对CCD分辨率的限制将是提高CCD测量技术精度的关键1对位置示意图2 几种处理方法的分析及对比2.1 概率法用线阵CCD进行尺寸测量时,改变测量条件,即在测量过程中使工件和CCD在线阵方向上往复运动,累计多个周期的脉冲取得平均值,测量分辨率可以得到提高1为了讨论方便,我们做出如下三种假设:(1)光敏元中心距为d,光敏单元的宽度也为d1这一假设将在随后进行详细论述1( 94 西安工业学院学报第18卷射、光源等多种因素的影响,边缘存在包含多个光敏单元的过渡区,但对CCD成像来说,比较电平一旦确定,也就等效于确定了光强跃变的影像边缘1(3)影像边缘的光敏单元上影区宽大于d/2时不能形成脉冲,在脉冲中缺位,形成缺位脉冲1这一假设虽对某个单元不一定能表现出来,但对于多周期动态测量,从统计的观点看却是成立的1如将光敏单元宽度n等分,在动态情况下测量时,每个周期中光积分期间影像边缘落在那一个光敏单元的那几个等分上是偶然的,但落在每一区上的几率都是相等的1图5 线阵CCD成像阴影区示意图设工件尺寸为l=m+n1.d (n1=0,1,2,,,n-1)部分n现在分析在动态测量情况下CCD的测量结果与实际尺寸的差别1在图5中,阴影表示此范围内两端光敏元件上的影像区均大于d/2,脉冲列的缺位脉冲数为m+1个,出现这种情况的概率为p=Sa1b1c1d1Sabcd=n1a1c1==n2acn1dn1=dn1dn则多周期累积平均求出的测量结果为n11md+(m+1)d=1-nn此结果与实际被测尺寸一致,而分辨力已提高到d/m1精度l=m+现在我们对假设1作补充说明1实际上:光敏元中心距=光敏元宽度+单元间间距,单元间间距一般为中心距的一小部分,设它为Bd,则光敏元宽度为(1-B)d1在这种情况下,假设时出现缺位脉冲1按这一原理,画出图6并2n1n1可知,对尺寸为l=(m+)的工件,其出现m+1个缺位脉冲的几率仍为,阴影区只是向nn左上方移动罢了13可具体化为:当光敏元上影像区宽A>:Dn=D第2期高雁飞:几种CCD图像边缘的高精度检测方法分析 95 差,Dn为n次等精度测量算术平均值的标准误差,n为测量次数,可见测量误差随测量次数的增加而减少1图6 线阵CCD成像阴影区示意图2.2 解调法解调方法需解决两个基本问题:¹如何从采样脉冲恢复连续的视频信号;º如何从这个连续的视频信号中确定边缘点1此方法的原理是:将电脉冲幅度表示的视频信号恢复成连续的视频信号,对此光滑信号以更高的分辨力确定两边缘点1这样空间的线阵CCD尺寸测量就转换成时间量,利用高频高稳定的晶振时钟作时间基准,可以方便地实现时间细分12.2.1 脉冲调幅信号的解调CCD对光学图像进行采样,当被采样光强信号的空间截止频率Xt小于采样率X0的二分之一,且假设阵列无限长时,其解调网络应有频率特性H(Xt)H(Xt)=X2tKsin(TdXt)sin(aTdXt/A)0Xt<X0/2Xt>X0/2(1)式中,K是与光强和器件参数有关的常数;X0=2P/Td,Td为脉冲周期;a为光敏元宽度;A为光敏元间距1被采样光强信号的空间截止频率Xt由光学成像系统的滤波特性和物面光强信号的频谱决定1对CCD来说,圆形光瞳的光学传递函数OTF,即(2)式表示了其光学成像系统的滤波特性H0(fs)=fs-1fscos()-2Q2Q00由下式决定IA(fs)=sin(2PAfs)jPe(3)-(fs2)2Q0fs<2Q0fs>2Q0(2)式中,2Qd2,K为光波长,d2为物距,D为孔径,fs为空间频率1物面光强的频率特性0=D/K96 西安工业学院学报第18卷(2)式、(3)式的空间频率特性可分别表示成下面的时间频率特性的解fsTdfs-1Tdcos(#)-2Q02Q0-Tdfs ft<2Td2Q0H0(fs)= 0 ft>2Tdsin(2PATdft/A)2PATdft/A(4)和IA(fs)=(5)(4)式和(5)式的乘积相当于被采样光强的频率特性,它的带宽等于(4)式的截止频率2PAd/Kd2Td,可见改变D/d2的值,就可使它满足(1)式的条件12.2.2 特征点提取假设成像物镜是无几何像差的理想光学系统,此时下式成立I(xi,yi)=I0(xi,yi)|h(xi,yi)|22(6)式中,I0(xi,yi)是理想的光强函数;|h(xi,yi)|是点光源位于光轴时的衍射像;I(xi,yi)是衍射像的光强函数.为了方便,我们在一维情况下进行讨论1(6)式的唯一形式为I(xi)=I0(xi)|h(xi)|2设成像放大率为1,则理想的光强函数I0(xi)为I0(xi)=I0[u(-A-xi)+u(xi-A)]式中u(x)=1 x\00 x<0(8)(7)将(8)式代入(7)式,并对xi求偏导,得5I(xi)22=I0|h(xi-A)|-I0|h(xi+A|i2(9)2J1(Dx/2)22J1(Dx/2)2其中,|h(x)|=K(K,D),J1(x)是贝塞尔函数,函数的值在零件 Dx/2Dx/22大于第三个零点以后几乎为零,因此,如果略去函数|h(x)|在x>x3时的值,则(9)式表明,当A>x3时,边缘特征点处光强信号的微分绝对值最大,这样,即可确定边缘点12.3 空间拟合函数法用数学方法,采用拟合函数,在某种拟合准则(如最小二乘原理)下,对样本函数进行拟合,重建连续图象,这就是空间函数拟合[7]1一维的样本数据拟合等效于数学上的曲线拟合,可选择的数学模型为:线性模型、非线性模型、样条函数1由于非线性模型求解困难,而样条函数的引入降低了函数的连续性,故一般多采用线性模型1下面介绍一种实用的线性拟合边缘检测方法:直线拟合最小二乘法1对线阵CCD来说,设{(x-j,R-j),(x-j+1,R-j+1),,,(x0,R0),,,(xj,Rj)}是灰度2j,第2期高雁飞:几种CCD图像边缘的高精度检测方法分析 97y=a0+a1xF(a0,a1)=i=-jE[(a0+ja1x1)-Ri]2直线拟合最小二乘法就是根据在定点(xj,Rj)(i=-j,j)误差平方和最小,即F(a0,a1)最小的原则确定(a0,a1),从而得出拟合直线,即令=0=1化简得(2j+1)a0+(ji=-jji=-jjE2(a0+ja1xi-Ri)=0a1xi-Ri)=0 ji=-jE2xi(a0+jExi)ai=ERii=-jj(解得i=-jjji=-jExi)a0+(Exi)i=-jjj2a1=i=-jEixiRia0=ExiExiRi-ERiExii=-ji=-ji=-ji=-j2(2j+1)jjExi2-(i=-jExi)j2a1=i=-jExiERi-i=-ji=-j(2j+1)Exij2-(2j+1)(i=-jExji=-jjExiRi2)即,当a0,a1等于上述值时,误差平方和F有最小值,则图7 直线拟合边缘检测算法示意图边缘点的位置为x=aQ式中,y为选定的参考点的灰度值.图7是该算法的原理图,其中M点为灰度图像边缘斜率最大点,Q点为边缘点的参考点12.4 多项式插值法根据多项式插值理论,有wn(x)f(x)=Eyk=(x-xk)wcn(xk)k=0nnnk=0nQEykIk(x)(10)式中,wn(x)=i7(x-xi),wcn(xk)=i7(xk-xi),xk为插值结点;yk为函数值;f(x)为插值=0Xk 函数1设xi,yi为用传统边缘检测方法得到的边缘点,对面阵CCD所得的二维数字图像的梯度图像,在x方向,以R(i-1,j),R(i,j),R(i+1,j)为函数值,以xi-a,xi+a(其中a为像元x 方向),(,98 西安工业学院学报第18卷f1(x)=y0I0(x)+y1I1(x)+y2I2(x)其中(x-xi)[x-(xi+a)]y0I0(x)=[(x-a)-x][(x-a)-(x+a)]R(i-iiiiy1I1(x)=y2I2(x)=iiR(i,j)[xi-(xi-a)][xi-(xi+a)]1,j)1,j)iiR[(xi+a)-(xi-a)][(xi+a)-xi](i+对f1(x)求一次微分,有f1(x)=y0Ic0(x)+y1Ic1(x)+y2Ic2(x)=令f1c(x)=0,得x=xi+R(i-1,j)-R(i+1,j)#R(i-1,j)-2R(i,j)+R(i+1,j)21)为函数值,(aR(i+1,j)-aR(i-1,j))(x-xi)[R(i,j-1)-2R(i,j)+R(i,j+1)]+2aa 同理,在y方向上以f2(y)为插值函数,以R(i,j-1),R(i,j),R(i,j+(i,j-1)(i,j+1)#R(i,j-1)-2R(i,j)+R(i,j+1)2以yi-b,yi,yi+b(其中b为像元y方向间距)为结点,进行多项式插值,并令f2c(y)=0,得y=yi+此时的x,y是插值多项式的极值点,在这点灰度图像的一阶导数最大,即这点为边缘点13 结束语由本文分析得知,在用概率论法提高线阵非实时CCD测量精度时,其误差随采样周期的增加而减小1另外,由于此方法为动态测量,速度必然会对测量结果产生影响,但如果选择合适的往复运动振幅及频率,速度的影响将会很小;解调法有一定的局限性,即随着测量范围的扩大和精度要求的提高,其时钟频率将增加到数十兆赫,这时,通过提高计数时钟频率来获得高分辨率,在工程上是有难度的;对空间拟合函数法来说,选用合适的数学模型将会减小逼近误差,且针对直线拟合最小二乘法来说,若将边缘参考点选在梯度最大值附近,将会大大减小由于边缘斜率变化而产生的测量误差1参考文献1 王新成1多媒体实用技术1成都:电子科技大学出版社,19962 郭彦珍1应用概率论提高CCD尺寸测量的分辨力1仪器仪表学报,1988(2):149~1533 邹仲力1提高CCD尺寸测量分辨力的解调法1仪器仪表学报,1986(1):38~444 吴晓波等1应用多项式插值函数提高面阵CCD尺寸测量的分辨力1仪器仪表学报,1996(2):154~1585 金杰等1提高CCD分辨率的一种尝试1现代计量测试,1997(3):37-416 姜凌涛1应用Marr算子实现线阵CCD边缘高分辨率定位1光电工程,1996(1):23~287 张晓等1利用空间拟合函数实现超像元边界检测1计量学报,1996(3):236~240(编辑、校对郭俊仓)。

提高CCD摄像头焦距测量精度的两种方法
赵梅;鲍金河
【期刊名称】《传感技术学报》
【年(卷),期】2007(020)002
【摘要】简述了CCD摄像头测量航空相机焦距数值和检测实际成像面位置正确与否的原理和提高测试精度的方法.采用CCD摄像头接收被测相机所成的像,利用最小二乘法做曲线拟合和灰度矩法提高成像亮线中心的定位精度,从而精确地计算出像长值.实验和计算结果表明,两种方法对航空相机焦距数值的测试计算都有很高的精度,测试误差与理论误差(0.12%)相吻合;对实际成像面位置正确与否的检测判断结果完全相同,准确率达到100%.
【总页数】3页(P466-468)
【作者】赵梅;鲍金河
【作者单位】空军航空大学特种专业系,长春,130022;空军航空大学特种专业系,长春,130022
【正文语种】中文
【中图分类】TN386.5;TB811.13
【相关文献】
1.温度对长焦距测量精度的影响 [J], 董军;许乔;蔡邦维;张宁;李瑞洁
2.一种提高薄透镜焦距测量精度的改进方法 [J], 关小泉;马战军
3.提高凹透镜焦距测量精度的实验研究 [J], 左安友;李兴鳌
4.提高岩移观测平面测量精度的两种方法 [J], 袁耀荣
5.提高岩移观测平面测量精度的两种方法 [J], 袁耀荣
因版权原因,仅展示原文概要,查看原文内容请购买。
《光电检测技术-题库》(1)《光电检测》题库一、填空题1.光电效应分为内光电效应和外光电效应,其中内光电效应包括和。
2.对于光电器件而言,最重要的参数是、和。
3.光电检测系统主要由光电器件、和等部分组成。
4.为了取得很好的温度特性,光敏二极管应在较负载下使用。
5.光电倍增管由阳极、光入射窗、电子光学输入系统、和等构成。
6.光电三极管的工作过程分为和。
7.激光产生的基本条件是受激辐射、和。
8.检测器件和放大电路的主要连接类型有、和等。
D的基本功能是和。
=1.2eV,则该半导体材料的本征吸收长波限10.已知本征硅材料的禁带宽度Eg为。
11. 非平衡载流子的复合大致可以分为和。
12.在共价键晶体中,从最内层的电子直到最外层的价电子都正好填满相应的能带,能量最高的是填满的能带,称为价带。
价带以上的能带,其中最低的能带常称为,与之间的区域称为。
13.本征半导体在绝对零度时,又不受光、电、磁等外界条件作用,此时导带中没有,价带中没有,所以不能。
14.载流子的运动有两种型式,和。
15. 发光二极管发出光的颜色是由材料的决定的。
16. 光电检测电路一般情况下由、、组成。
17. 光电效应分为内光电效应和效应,其中内光电效应包括和,光敏电阻属于效应。
18.导带和价带中的电子的导电情况是有区别的,导带愈多,其导电能力愈强;而价带的愈多,即愈少,其导电能力愈强。
19.半导体对光的吸收一般有、、、和这五种形式。
20. 光电器件作为光电开关、光电报警使用时,不考虑其线性,但要考虑。
24.半导体对光的吸收可以分为五种,其中和可以产生光电效应。
22.光电倍增管由阳极、光入射窗、电子光学输入系统、和等构成,光电倍增管的光谱响应曲线主要取决于材料的性质。
23.描述发光二极管的发光光谱的两个主要参量是和。
25.检测器件和放大电路的主要连接类型有、和等。
26.使用莫尔条纹法进行位移-数字量变换有两个优点,分别是和。
27、电荷耦合器件(CCD)的基本功能是和。
基于线阵CCD的非接触微位移测量系统研究的开题报告一、研究背景和意义在工业应用中,微位移测量是一种重要的技术手段。
在许多领域,例如制造业、医疗等,微位移的测量和控制都扮演着至关重要的角色。
而在微位移测量中,非接触式的测量方案已经成为了主流。
与传统的接触式测量相比,非接触式测量具有测量精度高、测量速度快、不易对被测物体造成损害等优点,因此在工业应用中得到了广泛的应用。
线阵CCD作为常见的非接触式微位移测量元器件之一,已经被广泛应用于各种领域。
线阵CCD 可以将光学图像转换为电信号,通过对光电信号的处理,可以准确地测量被测物体的微小变形量。
由于线阵CCD 的分辨率高,探测灵敏度高等优点,使其在精度要求较高的微位移测量中表现良好。
因此,基于线阵CCD 的非接触微位移测量系统的研究对于推进微位移测量技术的发展,提升工业生产质量和效率,具有重要的意义和研究价值。
二、研究内容和方法本研究的主要内容是基于线阵CCD 的非接触微位移测量系统的研究。
具体研究内容如下:1. 研究线阵CCD 的基本工作原理和测量应用特点。
2. 设计基于线阵CCD 的非接触微位移测量系统,并分析测量系统的特点和优点。
3. 研究线阵CCD 的图像处理算法及其在微位移测量中的应用。
4. 对系统进行性能测试,分析系统的测量精度、稳定性和重复性等指标。
本研究将采用实验研究的方法进行,首先对线阵CCD 的基本原理进行研究,然后设计非接触微位移测量系统并进行测试,最后对测试结果进行分析并提出相关结论。
三、预期研究成果本研究的预期研究成果包括:1. 研究线阵CCD 的基本原理和测量应用特点。
2. 设计实现基于线阵CCD 的非接触微位移测量系统,并验证系统的有效性和可行性。
3. 研究线阵CCD 的图像处理算法及其在微位移测量中的应用。
4. 提出一套完整的线阵CCD 微位移测量系统的实现方案,能够有效地满足实际测量需求。
五、研究进度安排本研究计划于2021年10月开始,预计两年完成。
提高线阵CCD测量光束中心位置精密度的方法朱鹤年;张子良;常缨;房元峰;王长江【期刊名称】《计量学报》【年(卷),期】2006(027)003【摘要】用线阵CCD测量类钟形分布的光束中心位置时,常用高斯分布模型和最小二乘(LSM)回归计算.提出一种用准高斯分布以提高测量灵敏度、用截取阈值较高的方式以减少噪声影响、用加权LSM回归以提高精密度的方法.由于高斯曲线拟合时的因变量不等权,选用加权回归和等权回归相比,ADC化整误差和光电测量误差的影响将减小一个数量级.根据CCD器件的参数,能够确定像元数据的误差限值.再用蒙特卡罗法模拟误差分布规律,通过截尾分布数值的加权回归,求出使测量精密度提高的合理光束宽度范围.已将此方法用于冲击电流计的改进设计和位移测量,使微电流测量的精密度提高达两个数量级,并使30 mm内的微位移测量的非线性标准差不大于0.0025%.【总页数】5页(P216-220)【作者】朱鹤年;张子良;常缨;房元峰;王长江【作者单位】清华大学物理系,北京,100084;清华大学物理系,北京,100084;清华大学物理系,北京,100084;清华大学物理系,北京,100084;清华大学物理系,北京,100084【正文语种】中文【中图分类】TB92【相关文献】1.测量高功率激光束衍射光斑阵列位置的图象处理方法 [J], 陈哲;张小民2.基于中心线的管路端点位置精确测量方法 [J], 金鹏;刘检华;刘少丽;孙鹏;王骁3.图象处理方法在测量高功率激光束衍射光斑阵列位置中的实现 [J], 常胜利;陈哲4.一种同时测量高斯光束束腰位置和半径的新方法 [J], 黄水平5.用单片机精确测量线阵CCD上像点位置的原理和方法 [J], 曾吉荣;杨齐民;王威廉因版权原因,仅展示原文概要,查看原文内容请购买。
文章编号 10042924X (2002)0320281204采用CCD 的非接触测量中提高精度的一种方法李佳列,丁国清,颜国正,朱洪海(上海交通大学信息检测技术及仪器系,上海200030)摘要:利用CCD 传感器对工件进行测量是非接触测量领域的常用方法,但受到CCD 像元特征尺寸的限制,测量精度往往只能达到微米级,限制了该系统在非接触测量方面的更广泛应用。
本文从算法角度提出了一种提高CCD 精度的方法。
实验证明,方法能将测量的精度提高一个数量级。
关 键 词:电荷耦合器件;尺寸测量;边缘检测;梯度中图分类号:TB92 文献标识码:A1 引 言 近年来,作为一种有效的、快速的非接触测量手段,电荷耦合器件CCD (Charge Couple Device )在非接触测量系统中的应用相当普遍。
CCD 器件具有精度高、动态范围大、稳定性好、工作电压低等,此外它的输出信号易于处理,便于计算机接口处理[1]。
它可以直接用于物体外部尺寸,轮廓以及位移和有关物理量的测量。
运用CCD 进行测量时,测量精度取决于CCD 像元的大小。
为此人们进行了各方面的尝试来提高测量系统的精度:如改进制造工艺,减小CCD 传感器的像元宽度[2]采用光学系统放大被测物体,借此提高整个系统的精度[3-4]等等。
本文借鉴了图像处理中边缘提取算法的思想,提出一种采用最小二乘法的边缘线性拟合检测算法来提高系统精度的方法,并对该算法在非接触尺寸测量系统中应用的可行性进行了验证。
2 测量系统采用CCD 的非接触尺寸测量系统构成简图如图1所示。
平行光光源发光透过工件,工件实体部分遮住光线,而边缘部分(或工件中孔或槽等实体中挖空的部分)仍允许光线通过。
这样,在阵列CCD 传感器上将形成一个该零件的投影图。
由CCD 输出的图像输入电脑主机,用算法对图像进行处理,得出需要的尺寸。
针对不同的工件,测量主要分为两种方法:1)直接测量法:用于对小尺寸测量,如小的螺母、螺钉,或是工件上尺寸较小的键、槽等。
一般将CCD 的输出图像直接进行处理便可得到所要的数据。
2)间接分割法:对于一些较大的对象,其尺寸超过了CCD 传感器所能测量的最大范围,此时通过位置关系将测量分为几步进行:先在对象一端进行一次测量,然后将对象沿导轨移动,使另一端位于CCD 传感器的测量范围内,再进行一次测量(如图1虚线所示),这时对象的尺寸即为两次的测量结果及移动距离之和。
导轨上带有光栅,移动距离的测量精度可达1μm ,但最好的CCD 传感器其像元特征尺寸也只能达到7μm ,限制了测量精度的进一步提高。
图1 测量系统Fig.1 Measuring system. 收稿日期:2001205223;修订日期:2001212205第10卷 第3期2002年6月 光学 精密工程Optics and Precision Engineering Vol.10 No.3J un . 20023 算法在尺寸测量中,读取数据后,一般将其处理为用不同数值表达的灰度图,输出图像的一个像素代表一个CCD 像元间距,根据输出图像像素的灰度或灰度变化来判断边缘。
这就决定了在尺寸测量时CCD 的测量精度只能达到一个像元间距的大小。
3.1 数字图像的边缘检测[5]对灰度图像的边缘检测主要有两种办法:阈值法:该方法是对灰度图用一个阈值进行二值化处理,阈值以上的点为黑,以下的为白,获得黑白图像后,。
这种算法操作简单,存在的问题是阈值难以选取,而且受环境的影响很大,现在一般的图像检测已摈弃了这种算法。
梯度法:该方法是当灰度图上的灰度等级发生急剧变化且变化最大时即认为出现了边缘。
物理上灰度等级的变化在数学上表现为灰度对空间位置的梯度。
设x 和y 分别是水平方向和竖直方向,则f (x ,y )在y 方向的梯度为:G y (x ,y )= y f (x ,y )=5f (x ,y)y,(1)3.2 对CCD 输出图像的分析采用线阵CCD ,理想的图像边缘输出应为阶跃函数,如图2a 。
但由于光的衍射,成像系统的球差、像差和调焦误差,以及噪声影响,从CCD 输出的原始灰度图像(边缘处)如图2b ,采用平滑滤波算法处理后的图像为图2c ,对图2c 的图像求梯度,得到梯度图像为图2d ,根据边缘检测梯度算法的理论,梯度值最大的点m 对应图像的边缘,即图2c 中的A 点。
(a )理想梯度图 (b )实际梯度图 (a )Ideal grads image (b )Practical grads image(c )平滑处理后的灰度图(c )Gray image after smoothed(d )灰度图的梯度图(d )Grads image of the gray image图2 CCD 输出的灰度图及梯度图Fig.2 CCD output gray image and grads image.考虑到CCD 的输出是离散值,将图2c 中A点附近的图像放大得到图3a ,由此图可以看到,图2中的各图是由锯齿状的离散值近似而成。
实际的边缘点可能位于A 点与A ′点之间。
3.3 具体算法针对上述情况,在找到CCD 输出图像中灰度梯度最大点A 后,以该点为中心,两边各取几点,进行直线拟合,算法如下:所取的灰度图像中的点为Y I R -n ……R -1R 0R 1……R n X IA -n……A -1A 0A 1……A n 取拟合直线为:y i =ax i +b282 光学 精密工程 第10卷 设Φ=∑ni =-n2(y i-Y i )2=∑ni =-n2(ax i+b -Y i )2,(2)当5Φ5a =∑ni =-n 2(ax i+b -Y i )x i =05Φ5b=∑ni =-n2(ax i+b -Y i )x i =0.(3) 即a =∑ni =-nx i・∑ni =-n x i Y i ・-∑ni =-nYi・∑ni =-nx 2i ・∑ni =-n x i・∑ni =-nx 2i ・2(∑n i =-nx i・)2b =∑ni =-nx i・∑ni =-n x i Y i ・-∑ni =-nYi・∑ni =-nx 2i ・∑ni =-nx i・∑ni =-nx 2i ・2(∑ni =-nxi・)2,(4) 时,Φ有最小值。
边缘点的位置值为:x Q=Y Q -ba,(5)Y Q 的灰度值=A 的灰度值+A ′的灰度值23.4 仿真结果使用MA TLAB 对上述算法进行了仿真计算,结果如图3。
从仿真结果来看,n 取2或3(a )局部梯度图和拟合直线(a )Local grads image and fitted line(b )使用最小二乘法的结果(放大图)(b )Results using L SM (enlarged image )图3 局部梯度图和使用最小二乘法的结果Fig.3 Local grads -image and results using L SM.时,效果较好,对拟合曲线进行了检验之后,实际应用时n 取3,即采用7点拟合直线,这一点在其他文献中也有论述[6]。
3.5 实验验证为了验证上述算法在实际应用中是否可行,采用了前述实验装置进行验证(如图1),采用日本的激光测量仪(型号AN I1250、最小准确测量尺寸1μm )标定。
软件采用实时数据采集和处理,通过文中算法来判断边缘点的位置并完成尺寸的测量。
结果证明,采用此算法的非接触测量系统误差小于1μm ,大大优于原先的14μm ,提高了一个数量级。
4 进一步的讨论根据图像处理的边缘检测理论,采用曲线拟合的算法相比直线拟合算法能获得更理想的亚像素边缘检测结果,但此时算法的复杂度和计算量将大大增加,曲线的引入引起参数数量的增加,如何选取适应本系统的合适参数是个较难的问题,同时对于Y Q 值的选取也是一具有争论的问题,至今学者们的意见未能统一。
有关这些问题,感兴趣的读者可对此做进一步的研究。
382第3期 李佳列,等:采用CCD 的非接触测量中提高精度的一种方法 482 光学 精密工程 第10卷参考文献:[1]蔡文贵,李永远,许振华.CCD技术及应用[M].北京:电子工业出版社,1992.[2]谈新权,许胜辉,梅晓.CCD图像传感器的高分辨率技术[J].半导体光电,1999,(3):16-19.[3]孙学珠.高精度CCD尺寸自动检测系统的光学系统设计[J].光学技术.1995,(5):6-9.[4]安志勇.高分辨率CCD光电尺自动检测仪的研究[J].光学技术.1997,(5):24-27.[5]余松煜.数字图像处理[M].北京:电子工业出版社.1987.[6]佟首峰,阮锦,郝志航.CCD图像传感器降噪技术的研究[J].光学精密工程,2000,8(2):140-145.Method for improving precision in noncontact measurement by linear CCDL I Jia-lie,DIN G Guo-qing,YAN Guo-zheng,ZHU Hong-hai(Depart ment of Inf orm ation Detection Technology and Inst rument,S hanghai Jiaotong U niversity,S hanghai200030,Chi na)Abstract:To measure work pieces by CCD sensor is a common way in the noncontact measurement field, but the precision can only reachμm because of the size of CCD cells,which restricts the wide use of this kind of measurement system.This paper gives a method to improve CCD precision by arithmetic aspect. The experiment demonstrates that this method can improve the measurement precision by one order of mag2 nitude.K ey w ords:charge coupled devices;dimension measurement;edge detection;grads作者简介:李佳列(1976-)男,上海市人,硕士研究生,研究方向:光电测量系统,单片机系统,微特机器人.E-mail:Li2 jiaLie@.。