AP1000反应堆功率控制系统棒联锁逻辑分析
- 格式:pdf
- 大小:213.74 KB
- 文档页数:3
AP1000反应堆功率控制系统棒联锁逻辑分析'AP1000反应堆功率控制系统棒联锁逻辑分析1 概述反应堆功率控制系统用于维持和调节反应堆堆芯参数在设计要求范围内,以确保反应堆按照电厂功率要求输出热功率。
作为主要过程控制系统之一,反应堆功率控制系统的控制逻辑设计对电厂稳定运行至关重要。
AP1000反应堆功率控制系统包括两个子系统:反应堆冷却剂平均温度(Tavg)控制子系统和反应堆轴向功率偏移(AO)控制子系统(以下简称Tavg控制和AO控制)。
Tavg 控制响应二回路负荷要求,根据一回路工艺过程实测温度值与二回路要求值之间的偏差计算并输出控制,调节反应堆功率控制棒组(M棒组)按一定速率(8步/分至72步/分)在堆芯移动,从而实现维持或调节反应堆冷却剂平均温度在程序设定值的目的,Tavg控制即反应堆输出热功率控制。
AO控制根据堆外核测仪表所测的反应堆上下部功率之差(反应堆功率轴向偏差)与系统设定偏差带之间的偏移量来计算并输出控制,调节反应堆轴向功率偏移控制棒组(AO棒组)按固定速率(8步/分)在堆芯移动,从而维持轴向功率偏差在要求的偏差控制带内。
反应堆稳定运行及瞬态过程中,Tavg控制子系统和AO控制子系统同时独立采集不同的堆芯参数,响应不同的控制要求,逻辑上独立运算,最终输出控制指令至棒控系统不同类型的控制棒组。
在系统功能设计上两者相对独立,但在实际控制执行中,两者存在逻辑接口。
西屋原设计中两个子系统的逻辑接口包括:(1)在控制棒交换过程中,AO控制棒将执行Tavg控制指令,此时仅执行Tavg控制。
(2)在M棒移动过程中,AO棒的移动将被闭锁,直至M棒动作(Tavg调节)结束。
接口1:是AP1000反应堆控本文由联盟收集整理制过程中的周期性操作,本文不做分析。
接口2)即为实现M棒组动作优先于AO棒组动作的棒联锁设计,M棒动作指令将直接作为闭锁AO棒移动的条件之一,本文重点对此联锁设计进行分析。
AP1000压水堆功率控制模式浅析作者:孙林宁来源:《科技资讯》2015年第06期摘要:反应堆功率控制是维持反应堆稳定的核心控制,该文通过结合反应堆反应性控制的基本原理对AP1000采用的功率控制模式进行了简要的介绍,分析了AP1000核功率控制关于功率水平和功率分布的控制方式及约束条件,功率水平控制系统从低功率控制和高功率控制两个部分展开,功率分布则主要分析其轴向功率的控制信号及其限制条件。
同时简要减少了反应堆功率控制模块中的快速降功率功能。
最后将AP1000反应堆功率控制模式与其他模式进行了对比,在功率水平和功率分布调节方面进行了比较分析。
关键词:核电站反应性反应堆功率控制 AP1000模式中图分类号:TM44 文献标识码:A 文章编号:1672-3791(2015)02(c)-0042-02目前,压水堆核电厂因其功率密度高、结构紧凑、安全易控、技术成熟、造价和发电成本相对较低等特点,成为目前国际上最广泛采用的商用核电堆型。
而在我国,绝大部分商运核电以及在建核电也都采用了这种主流堆型。
随着压水堆的不断完善和发展,其反应堆功率控制系统也在不断的优化,目的是可以保证一、二回路的温度、压力等热工参数及堆芯功率分布等参数能满足一定的跟踪电网负荷变化的要求,并且能够避免造成过大的堆芯功率分布畸变。
1 反应堆功率控制基本原理反应堆功率控制中最重要的就是要保持反应堆临界(稳定工况),也即中子数量保持不变。
为此,就必须补偿在负荷变化中产生的各种反应性效应。
这些反应性效应主要有:慢化剂温度效应(水的温度效应)、燃料温度效应(多普勒效应)、燃耗、硼溶液的浓度、控制棒束(黑棒和灰棒)。
当反应堆从一个临界状态过渡到另一个临界状态时,这些反应性必须满足:Σρ=Δρ多普勒+Δρ棒+Δρ硼+Δρ温+Δρ毒=0其中,Δρ多普勒、Δρ毒、Δρ温为被控量,Δρ硼、Δρ棒为控制量。
如果Σρ>0,则功率上升;如果Σρ为了控制反应堆的链式裂变反应,即调节堆内的自由中子数,也叫中子通量控制,一般有两种互为补充的控制手段。
AP1000反应堆功率控制系统分析作者:张俊来源:《科技传播》2016年第17期摘要本文详细分析了AP1000反应堆功率控制系统在高、低功率水平下的反应堆功率控制、轴向功率分布的控制,总结了AP1000反应堆功率控制系统的特点,提出了今后运行过程中可能的风险和相应的建议。
关键词反应堆功率水平;功率分布;控制棒;控制中图分类号 TL3 文献标识码 A 文章编号 1674-6708(2016)170-0214-02反应堆功率控制系统是核电厂的核心控制系统之一,其主要功能是实现对反应堆功率的自动控制,包括整个反应堆的功率水平控制以及反应堆内的轴向功率分布控制。
本文将从高功率模式下的平均温度控制、低功率模式下的反应堆功率控制,反应堆轴向功率分布控制等方面来详细分析AP1000的反应堆功率控制系统的控制方式和特点。
1 AP1000反应堆功率水平控制1.1 高功率水平下的反应堆功率水平控制高功率(15%FP~100%FP)水平下,通过两个偏差信号之和得到的总偏差信号来向控制棒控制逻辑柜输出控制棒移动速度和移动方向信号,通过调节M棒组维持反应堆冷却剂的平均温度和功率水平一致。
这两个偏差信号分别是:温度偏差信号和功率偏差信号。
温度偏差信号为主偏差信号,是汽机功率转化得到的参考温度信号与测得的高选反应堆冷却剂平均温度信号之差;反应堆冷却剂平均温度由热段和冷段测量温度来决定,参考温度在零负荷至满负荷范围内,随着汽轮机负荷线性增加。
功率偏差信号是汽机输出功率信号与测量核功率信号之差。
该输入控制信号能改善系统的响应,减少系统的瞬态峰值,因此可以提高控制子系统的控制性能。
1.2 低功率水平下的反应堆功率水平控制低功率控制模式(3%FP~15%FP)主要是启动和停堆时使用,其控制偏差由功率偏差形成,即操纵员设定的功率给定值与反应堆外核测功率之差,用以控制控制棒的移动方向和速度。
该模式下,汽轮机解列,蒸汽旁路排放系统用于调节反应堆冷却剂的温度,操纵员可以输入核功率整定值、以及变化到目标功率水平的时间,使核功率按照设定的速率线性变化,达到期望的核功率。
AP1000反应堆功率控制系统棒联锁逻辑分析'AP1000反应堆功率控制系统棒联锁逻辑分析1 概述反应堆功率控制系统用于维持和调节反应堆堆芯参数在设计要求范围内,以确保反应堆按照电厂功率要求输出热功率。
作为主要过程控制系统之一,反应堆功率控制系统的控制逻辑设计对电厂稳定运行至关重要。
AP1000反应堆功率控制系统包括两个子系统:反应堆冷却剂平均温度(Tavg)控制子系统和反应堆轴向功率偏移(AO)控制子系统(以下简称Tavg控制和AO控制)。
Tavg控制响应二回路负荷要求,根据一回路工艺过程实测温度值与二回路要求值之间的偏差计算并输出控制,调节反应堆功率控制棒组(M棒组)按一定速率(8步/分至72步/分)在堆芯移动,从而实现维持或调节反应堆冷却剂平均温度在程序设定值的目的,Tavg控制即反应堆输出热功率控制.AO控制根据堆外核测仪表所测的反应堆上下部功率之差(反应堆功率轴向偏差)与系统设定偏差带之间的偏移量来计算并输出控制,调节反应堆轴向功率偏移控制棒组(AO棒组)按固定速率(8步/分)在堆芯移动,从而维持轴向功率偏差在要求的偏差控制带内。
反应堆稳定运行及瞬态过程中,Tavg控制子系统和AO控制子系统同时独立采集不同的堆芯参数,响应不同的控制要求,逻辑上独立运算,最终输出控制指令至棒控系统不同类型的控制棒组。
在系统功能设计上两者相对独立,但在实际控制执行中,两者存在逻辑接口。
西屋原设计中两个子系统的逻辑接口包括:(1)在控制棒交换过程中,AO控制棒将执行Tavg控制指令,此时仅执行Tavg控制。
(2)在M棒移动过程中,AO棒的移动将被闭锁,直至M棒动作(Tavg调节)结束。
接口1:是AP1000反应堆控本文由联盟收集整理制过程中的周期性操作,本文不做分析.接口2)即为实现M棒组动作优先于AO棒组动作的棒联锁设计,M棒动作指令将直接作为闭锁AO棒移动的条件之一,本文重点对此联锁设计进行分析.2 控制要求及棒联锁逻辑分析2.1 反应堆控制要求如前所述,反应堆正常运行过程中,棒控系统将独立接收来自Tavg控制和AO控制输出的M棒和AO棒动作指令,M棒移动(提棒或插棒)将闭锁AO棒移动(提棒或插棒),直至M棒动作指令结束.此控制策略体现了Tavg控制要优先AO控制,在某一瞬态均有Tavg和AO调节需求时,只有先完成Tavg调节后才能进行AO 调节。
浅析AP1000棒控电源系统运行风险发布时间:2023-02-21T08:29:19.646Z 来源:《福光技术》2023年2期作者:舒童[导读] AP1000 棒控电源系统(RDPSS)为控制棒驱动机构提供260V三相交流电源,它的可靠程度直接关系到反应堆能否正常运行。
该系统的可靠性要求很高,一旦其发生人因事故或设备问题,都有可能导致系统可靠性降低、停堆甚至触发S信号。
三门核电有限公司浙江三门 3171001.引言AP1000 棒控电源系统(RDPSS)为控制棒驱动机构提供260V三相交流电源,它的可靠程度直接关系到反应堆能否正常运行。
该系统的可靠性要求很高,一旦其发生人因事故或设备问题,都有可能导致系统可靠性降低、停堆甚至触发S信号。
根据我厂以及国内同行电厂运行经验,棒控电源系统实际运行过程中,由于人因事故或设备问题,已经产生过多起异常状态或跳闸事故,影响了棒控电源系统可靠性。
因此棒控电源系统运行风险控制对于保证核电厂安全运行具有其重要意义。
本文分析了 AP1000 机组满功率运行时,预防棒控电源机组跳闸的风险控制措施,以及跳闸后对电厂的影响及应对策略,同时针对两列棒控电源机组跳闸后,运行人员的不同响应时间和动作顺序带来的后果进行了理论和模拟分析,并提出相关的改进意见。
2.棒控电源系统介绍2.1棒控电源系统布置和功能AP1000反应堆棒控电源系统采用传统的电动机/发电机组配置,为控制棒驱动机构提供可靠的三相260V,50Hz 电源,且能保证在多种故障工况下为控制棒驱动系统供电。
本系统与核电站电源的任何暂态扰动无关,因此具有一定的独立性。
棒控电源系统为非安全相关系统,由4个主要部件组成,即2套电动机/发电机组,2台 RDPS控制柜。
每一套电动机/发电机组由一台RDPS控制柜控制。
一台380V异步电动机、一台同步发电机与一台RDPS控制柜共同组成一个冗余序列,正常运行时两列同时向控制棒驱动机构供电,每列各承担 50%的负荷。

AP1000棒控系统迭步逻辑分析及改进方案发布时间:2021-05-27T02:07:07.206Z 来源:《中国电业》(发电)》2021年第3期作者:米正宇张向伟[导读] 由于采用机械模式补偿燃耗,迭步操作成为AP1000核电厂棒控系统日常操作的主要方式之一。
三门核电有限公司浙江省台州市 317112摘要:由于采用机械模式补偿燃耗,迭步操作成为AP1000核电厂棒控系统日常操作的主要方式之一。
本文在介绍棒控系统的迭步控制的实现方式的基础上,分析了AP1000棒控系统逻辑测试中出现的迭步异常情况及原因,并提出改进方案。
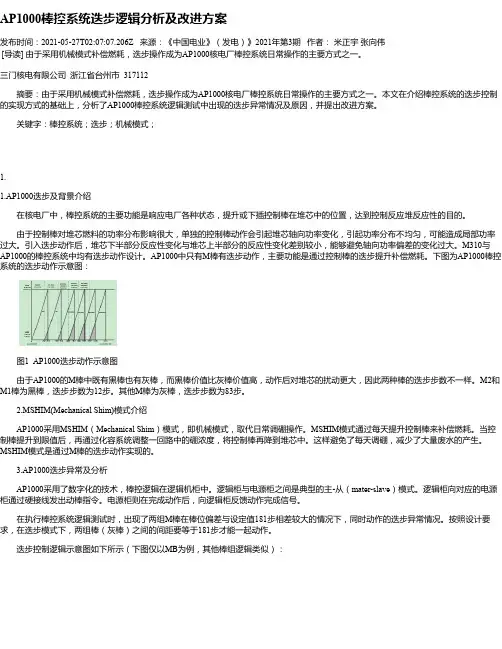
关键字:棒控系统;迭步;机械模式;1.1.AP1000迭步及背景介绍在核电厂中,棒控系统的主要功能是响应电厂各种状态,提升或下插控制棒在堆芯中的位置,达到控制反应堆反应性的目的。
由于控制棒对堆芯燃料的功率分布影响很大,单独的控制棒动作会引起堆芯轴向功率变化,引起功率分布不均匀,可能造成局部功率过大。
引入迭步动作后,堆芯下半部分反应性变化与堆芯上半部分的反应性变化差别较小,能够避免轴向功率偏差的变化过大。
M310与AP1000的棒控系统中均有迭步动作设计。
AP1000中只有M棒有迭步动作,主要功能是通过控制棒的迭步提升补偿燃耗。
下图为AP1000棒控系统的迭步动作示意图:图1 AP1000迭步动作示意图由于AP1000的M棒中既有黑棒也有灰棒,而黑棒价值比灰棒价值高,动作后对堆芯的扰动更大,因此两种棒的迭步步数不一样。
M2和M1棒为黑棒,迭步步数为12步。
其他M棒为灰棒,迭步步数为83步。
2.MSHIM(Mechanical Shim)模式介绍AP1000采用MSHIM(Mechanical Shim)模式,即机械模式,取代日常调硼操作。
MSHIM模式通过每天提升控制棒来补偿燃耗。
当控制棒提升到限值后,再通过化容系统调整一回路中的硼浓度,将控制棒再降到堆芯中。
这样避免了每天调硼,减少了大量废水的产生。
AP1000核电站反应堆保护系统试验总体分析发表时间:2019-05-09T11:59:14.267Z 来源:《当代电力文化》2019年第01期作者:罗慧[导读] 本文对AP1000反应堆保护系统PMS从最初设计到最终运行维护各阶段的试验进行了全面介绍,主要包括厂家测试、现场测试、定期监督试验,并对各阶段的主要试验进行了特点分析和比对。
山东核电有限公司,山东烟台 265116摘要:本文对AP1000反应堆保护系统PMS从最初设计到最终运行维护各阶段的试验进行了全面介绍,主要包括厂家测试、现场测试、定期监督试验,并对各阶段的主要试验进行了特点分析和比对。
关键词:1E级;厂家测试;现场测试;定期监督试验The Overall Analysis of Reactor Protection and Monitoring System TestAbstracts: The overall tests of nuclear Reactor Protection and Monitoring System from initial design to final running stage ,including manufacturers test, field test, periodic surveillance test are described in this paper ,and the characteristics of tests are analyzed and compared.Key Words:1E; manufacturers test; field test; periodic surveillance test1.引言核电厂纵深防御的基本原则要求设置安全仪控系统,用于保证核电厂安全运行、防止出现不安全工况或缓解不安全工况的后果。
因此,有必要通过实施一系列试验和验证来确保安全仪控系统设备功能正常可靠,为核电厂的安全提供重要保障。
AP1000反应堆补水控制系统控制逻辑分析闫超【摘要】本文对A P1000中反应堆补水控制系统(RMCS)的几种运行模式进行了描述,分析了正常和事故瞬态下的差异.在此基础上,对正常运行模式下RMCS控制器进行了描述;最后分析了RMCS控制逻辑和重要设备的控制逻辑信号,帮助运行人员关注人因失误的风险点.【期刊名称】《科技视界》【年(卷),期】2018(000)006【总页数】2页(P117-118)【关键词】AP1000;反应堆补水控制系统;稳压器液位【作者】闫超【作者单位】三门核电有限公司,浙江台州 312117【正文语种】中文【中图分类】TL351.60 引言作为反应性设计基准事件之一——硼稀释事件一直受到核工业界的广泛关注。
所谓硼稀释事件是由于错误地向一回路引入低硼浓度液体或者清水使反应性失控增加。
AP1000反应堆补水控制系统(Reactor Makeup Control System,RMCS)作为向一回路补水的控制逻辑单元,对预防和有效降低人因失误导致的误稀释反应性事件尤为重要。
为实现RMCS的合理控制,运行人员有必要学习和掌握RMCS的控制逻辑和特点。
1 反应堆补给控制系统概述AP1000反应堆补给控制系统的功能为之一调整RCS的硼浓度和化学条件;功能之二为通过监测稳压器的液位来增加RCS的容积。
在功率运行时,只需根据一回路泄漏率间断投运补水控制系统。
1.1 正常运行在功率运行时,不需要提供连续的补水流量,只需根据稳压器液位间断投运补水和下泄。
RMCS正常运行时包含 4种模式:自动补水(AUTO)、硼化(BORATE)、稀释(DILUTE)、混合补水(BLEND)。
在这些模式中,硼化模式和稀释模式用来调整RCS的硼浓度;混合模式和自动补给模式是在不改变硼浓度的前提下增加RCS水装量,根据设定的硼浓度调节上充泵吸入口母管控制三通阀(CVS-V115)的开度。
自动补水模式依据稳压器的液位控制信号控制补水系统的运行,混合模式依据操纵员设定的参数手动启动。
AP1000堆型核电站反应堆装堆技术分析摘要:本文对AP1000堆型反应堆装堆工作进行描述,结合笔者在核电装堆工作的实际经验,着重分析相关的技术关键点以及在工作过程中可能存在的风险,通过分析并提出相应的预防措施以达到精益施工的要求,为后续大修期间装拆堆工作提供借鉴。
关键词:AP1000;装堆;堆内构件;风险前言:在目前我国核电行业大力发展的背景下,核电的安全性受到更高程度的关注,AP1000堆型核电站作为三代核电技术代表将引领着中国核电的发展,但目前在国际上对于AP1000堆型无成熟的运行、维修经验。
反应堆装堆工作属于核电站的核心工作,主要涉及到的设备有上部堆内构件、下部堆内构件等,均属于核电站中最核心的设备,也是核燃料的反应活性区,在大修期间也拥有着最高的剂量率。
本文通过论述装堆工作内容,抓住关键风险质量控制点,优化工作步骤,合理安排人员,提高工作效率,保证安全质量。
1.反应堆装设备描述反应堆装堆工作主要涉及到设备有:下部堆内构件、上部堆内构件、下部堆内构件主要为核燃料组件提供支撑的作用,并起到合理分配进入堆芯冷却剂流量作用,上部堆内构件主要为控制棒提供导向以及为堆芯仪表提供支撑。
2.反应堆装堆关键点2.1控制区建立反应堆的装堆过程中,对防异物要求非常高,需作为防异物高风险区进行管理,堆内构件、一体化顶盖吊装作业风险高,要严格控制该区域的人员,以此为背景建立作业控制区,通过人员控制以达到异物及安全作业控制。
2.2下部堆内构件吊装关键点1:下部堆内构件从存放区域吊移至压力容器上方。
下部堆内构件通过堆内构件吊具吊装就位至反应堆压力容器内,将下部堆内构件从下部堆内构件存放区域吊出,其吊出高度应高于在通往压力容器吊装通道的最高点,即压力容器密封凸台的高度,经过高度计算得出,在堆内构件吊具导向套下表面高出堆内构件存放架池壁导向柱约1305mm时(此高度可使用激光测距仪进行测量),此时下部堆内构件最底部高出压力容器上表面200mm,记录此时环吊的高度示数H,缓慢将下部堆内构件移至压力容器上方,在此过程中,严格监控吊装路径是否通畅,是否存在干涉情况。