1.曲柄摇杆机构
- 格式:ppt
- 大小:7.03 MB
- 文档页数:100

收集的几种连杆机构机器人行走背后的机械原理(一)机器人概念已经红红火火好多年了,目前确实有不少公司已经研制出了性能非常优越的机器人产品,我们比较熟悉的可能就是之前波士顿动力的“大狗”和会空翻的机器人了,还有国产宇树科技的机器狗等,这些机器人动作那么敏捷,背后到底隐藏了什么高科技呢,控制技术太过复杂,一般不太容易了解,不过其中的机械原理倒是相对比较简单,大部分都是一些连杆机构。
连杆机构(Linkage Mechanism)又称低副机构,是机械的组成部分中的一类,指由若干(两个以上)有确定相对运动的构件用低副(转动副或移动副)联接组成的机构。
低副是面接触,耐磨损;加上转动副和移动副的接触表面是圆柱面和平面,制造简便,易于获得较高的制造精度。
由若干刚性构件用低副联接而成的机构称为连杆机构,其特征是有一作平面运动的构件,称为连杆,连杆机构又称为低副机构。
其广泛应用于内燃机、搅拌机、输送机、椭圆仪、机械手爪、牛头刨床、开窗、车门、机器人、折叠伞等。
主要特征连杆机构构件运动形式多样,如可实现转动、摆动、移动和平面或空间复杂运动,从而可用于实现已知运动规律和已知轨迹。
优点:(1)采用低副:面接触、承载大、便于润滑、不易磨损,形状简单、易加工、容易获得较高的制造精度。
(2)改变杆的相对长度,从动件运动规律不同。
(3)两构件之间的接触是靠本身的几何封闭来维系的,它不像凸轮机构有时需利用弹簧等力封闭来保持接触。
(4)连杆曲线丰富,可满足不同要求。
缺点:(1)构件和运动副多,累积误差大、运动精度低、效率低。
(2)产生动载荷(惯性力),且不易平衡,不适合高速。
(3)设计复杂,难以实现精确的轨迹。
百度百科的相关词条图片如下下面我们就看看一般都有什么连杆机构适于用于行走(或者移动)的。
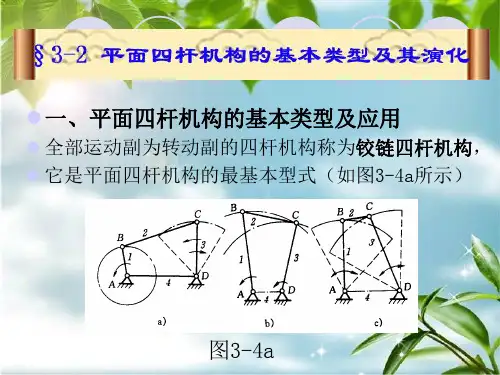
第一、平面四杆机构(Planar four-bar mechanism )平面四杆机构是由四个刚性构件用低副链接组成的,各个运动构件均在同一平面内运动的机构。
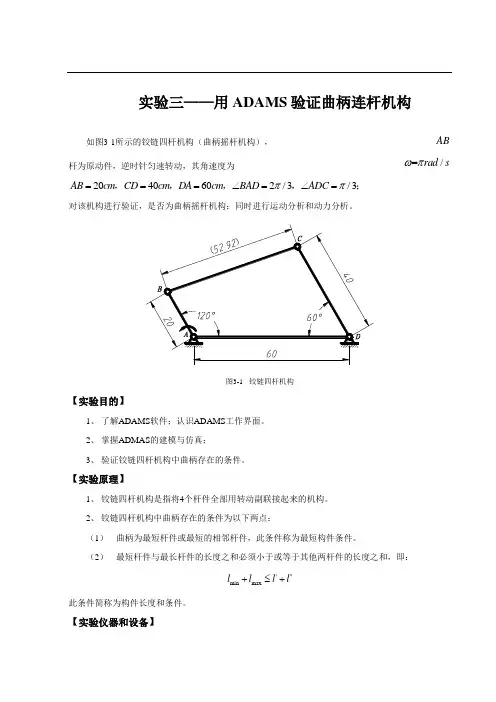
实验三——用ADAMS 验证曲柄连杆机构如图3-1所示的铰链四杆机构(曲柄摇杆机构),AB 杆为原动件,逆时针匀速转动,其角速度为=/rad s ωπ2040602/3/3AB cm CD cm DA cm BAD ADC ππ===∠=∠=,,,,;对该机构进行验证,是否为曲柄摇杆机构;同时进行运动分析和动力分析。
图3-1 铰链四杆机构【实验目的】1、 了解ADAMS 软件;认识ADAMS 工作界面。
2、 掌握ADMAS 的建模与仿真;3、 验证铰链四杆机构中曲柄存在的条件。
【实验原理】1、 铰链四杆机构是指将4个杆件全部用转动副联接起来的机构。
2、 铰链四杆机构中曲柄存在的条件为以下两点:(1) 曲柄为最短杆件或最短的相邻杆件,此条件称为最短构件条件。
(2) 最短杆件与最长杆件的长度之和必须小于或等于其他两杆件的长度之和,即:'''min max l l l l +≤+此条件简称为构件长度和条件。
【实验仪器和设备】1、计算机。
2、机械系统动力学分析软件ADAMS 2013。
3、《机械设计基础》教材;实验指导书;实验报告。
【实验步骤】1、启动ADAMS。
双击桌面上ADAMS/View的快捷图标“”,打开ADAMS/View。
在欢迎对话框如图3-2中选择“新建模型”(Create a new model),弹出如图3-3所示“创建新模型”(Create a new model)对话框。
图3-2 欢迎对话框图3-3 “创建新模型”对话框在“模型名称”(Modelname)栏中输入:sparkplug;在“重力(Gravity)”栏中选择“正常重力(-全局Y轴)”;在“单位(Units)”栏中选择“MMKS –mm,kg,N,s,deg”;在“工作路径”栏中选择“C:\sparkplug”。
2、设置工作环境。
2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。
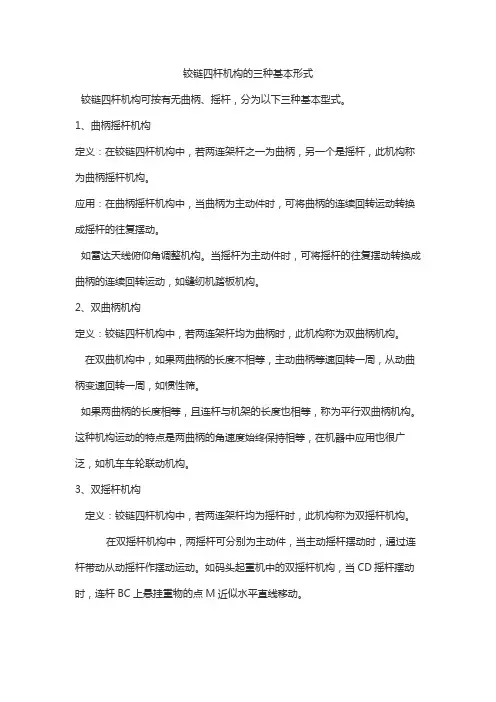
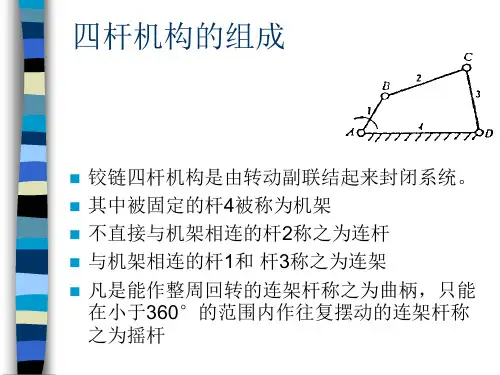
铰链四杆机构的三种基本形式
铰链四杆机构可按有无曲柄、摇杆,分为以下三种基本型式。
1、曲柄摇杆机构
定义:在铰链四杆机构中,若两连架杆之一为曲柄,另一个是摇杆,此机构称为曲柄摇杆机构。
应用:在曲柄摇杆机构中,当曲柄为主动件时,可将曲柄的连续回转运动转换成摇杆的往复摆动。
如雷达天线俯仰角调整机构。
当摇杆为主动件时,可将摇杆的往复摆动转换成曲柄的连续回转运动,如缝纫机踏板机构。
2、双曲柄机构
定义:铰链四杆机构中,若两连架杆均为曲柄时,此机构称为双曲柄机构。
在双曲机构中,如果两曲柄的长度不相等,主动曲柄等速回转一周,从动曲柄变速回转一周,如惯性筛。
如果两曲柄的长度相等,且连杆与机架的长度也相等,称为平行双曲柄机构。
这种机构运动的特点是两曲柄的角速度始终保持相等,在机器中应用也很广泛,如机车车轮联动机构。
3、双摇杆机构
定义:铰链四杆机构中,若两连架杆均为摇杆时,此机构称为双摇杆机构。
在双摇杆机构中,两摇杆可分别为主动件,当主动摇杆摆动时,通过连杆带动从动摇杆作摆动运动。
如码头起重机中的双摇杆机构,当CD摇杆摆动时,连杆BC上悬挂重物的点M近似水平直线移动。
判定方法:杆长之和条件: 最短杆与最长杆之和小于或等于其余两杆长度之和。
满足杆长之和条件: ①最短杆为机架-----双曲柄机构; ②最短杆的相邻杆为机架----曲柄摇杆机构; ③最短杆的相对杆为机架-----双摇杆机构。
不满足杆长之和条件:无论以哪个杆作机架,均为双摇杆机构。
曲柄摇杆机构名词解释1. 什么是曲柄摇杆机构?曲柄摇杆机构是一种常见的机械传动装置,用于将旋转运动转换为直线运动或者将直线运动转换为旋转运动。
它由曲柄、摇杆和连杆组成。
2. 曲柄曲柄是曲线形状的轴,它通常被安装在一个旋转轴上。
曲柄的一端与旋转轴连接,另一端则通过连杆与摇杆相连。
当旋转轴旋转时,曲柄就会带动摇杆和连杆做相应的运动。
3. 摇杆摇杆是一个具有固定中心点的刚性杆件,它可以绕着中心点进行旋转。
摇杆的一端与连杆相连,另一端则可以用来传递力量或者控制其他装置。
通过改变中心点和长度,可以调整摇杆的运动特性。
4. 连杆连杆是连接曲柄与摇杆的关键部件,它通常是一个刚性的直线导向元件。
连杆有时也被称为“连接杆”或“连杆杆件”。
它的作用是将曲柄的旋转运动转换为摇杆的直线运动,或者将摇杆的直线运动转换为曲柄的旋转运动。
5. 曲柄摇杆机构的工作原理曲柄摇杆机构的工作原理基于连杆机构和曲线运动的特性。
当曲柄绕旋转轴旋转时,连杆会带动摇杆做直线运动。
具体来说,当曲柄处于水平位置时,连杆与摇杆呈直线状,并且摇杆处于最低点。
随着曲柄的旋转,连杆开始向上运动,同时带动摇杆沿着一个特定的轨迹做上下振动。
当曲柄继续旋转至垂直位置时,连杆达到最高点,并且摇杆处于最高点。
在曲柄继续旋转过程中,连杆再次向下移动并带动摇杆做相应的振动。
通过调整连杆和摇杆的长度以及中心点位置,可以改变曲柄摇杆机构的输出特性,如振幅、周期等。
6. 曲柄摇杆机构的应用曲柄摇杆机构广泛应用于各种机械装置中,包括发动机、泵、压缩机、内燃机等。
它们可以用于转换旋转运动和直线运动之间的能量和力量传递。
在发动机中,曲柄摇杆机构被用来将活塞的往复运动转换为曲轴的旋转运动,从而驱动汽车或者其他设备。
在泵和压缩机中,曲柄摇杆机构被用来增加或减少压力,并实现液体或气体的输送。
曲柄摇杆机构还常见于一些玩具、模型和工艺品中,用于制造有趣的动态效果。
7. 曲柄摇杆机构的优点和局限性优点:•简单可靠:曲柄摇杆机构由少量的部件组成,结构简单且可靠性高。
曲柄摇杆机构的特点及应用曲柄摇杆机构是一种常见的机械传动机构,由曲柄连杆和摇杆组成。
曲柄部分是一个能够旋转的柱体,摇杆则是通过连杆与曲柄相连,可以在一定范围内摇摆。
这种机构具有以下特点及广泛的应用:1. 简单可靠:曲柄摇杆机构结构简单,制造成本低,且使用可靠。
可通过简单的构造来实现复杂的动作,适用于大多数应用场景。
2. 可控性强:曲柄摇杆机构可以通过调整曲柄的旋转角度和摇杆的长度来改变机构的运动轨迹和速度。
这种可控性使得曲柄摇杆机构可以适应不同的工作需求,具有较高的灵活性。
3. 负载能力强:曲柄摇杆机构可以承受较大的负载。
曲柄作为主动件,能够高效地转化输入的旋转运动为输出的直线运动,从而实现多种工作需要。
4. 可实现多种运动方式:曲柄摇杆机构可以实现多种不同的工作运动,如简单的往复运动、旋转运动、振动运动等。
这种多样性使得曲柄摇杆机构可以应用在多种领域,满足不同的工作需求。
曲柄摇杆机构的应用广泛:1. 发动机:曲柄摇杆机构在汽车发动机中起到了关键的作用。
曲柄摇杆机构将来自汽缸的气体压力通过连杆传递给曲柄,将往复运动转化为旋转运动,从而驱动发动机工作。
2. 机械钟表:曲柄摇杆机构也广泛应用于机械钟表。
通过调整曲柄的旋转角度和连杆的长度,可以实现钟表的时间调整和精准控制。
3. 石油钻井设备:曲柄摇杆机构在石油钻井设备中用于扩孔和钻孔操作。
通过调整曲柄的运动轨迹和速度,实现对地下油气资源的开采。
4. 工业生产设备:曲柄摇杆机构在工业生产设备中起到了重要作用。
例如,用于控制拉压机的动臂,实现对金属板材的加工;用于控制注塑机的模板,实现对塑料制品的生产。
5. 柴油机:柴油机中的喷油器系统就采用了曲柄摇杆机构。
曲柄通过连接杆将旋转运动转化为直线运动,驱动喷油器实现燃油的喷射。
总结起来,曲柄摇杆机构作为一种简单可靠、负载能力强、可控性强的机械传动机构,被广泛应用于各个领域。
无论是在发动机、钟表、石油钻井设备,还是在工业生产设备和柴油机等领域,曲柄摇杆机构都起到了重要的作用。
曲柄摇杆机构计算公式
曲柄摇杆机构是一种常见的机械传动机构,用于将旋转运动转换为往复运动。
在设计和分析曲柄摇杆机构时,需要使用一些计算公式。
以下是常用的曲柄摇杆机构计算公式:
1. 曲柄转角公式
曲柄转角是指曲柄轴线与水平面之间的夹角,用θ表示。
曲柄转角的大小与摇杆运动的范围有关。
曲柄转角公式如下:θ = arctan (l*sinφ / (r-l*cosφ))
其中,l表示连杆长度,r表示曲柄半径,φ表示摇杆偏角(摇杆与曲柄轴线的夹角)。
2. 摇杆长度公式
摇杆长度是指摇杆的长度,用l表示。
摇杆长度公式如下:
l = sqrt((x1-x2)^2 + (y1-y2)^2)
其中,(x1, y1)表示摇杆连接点的坐标,(x2, y2)表示曲柄连接点的坐标。
3. 连杆角速度公式
连杆角速度是指连杆的角速度,用ω表示。
连杆角速度公式如下:
ω = (2πn) / 60
其中,n表示转速,单位为转/分。
4. 连杆角加速度公式
连杆角加速度是指连杆的角加速度,用α表示。
连杆角加速度公式如下:
α = (4π^2n^2) / 60
其中,n表示转速,单位为转/分。
以上是曲柄摇杆机构常用的计算公式,对于机构的设计和分析具有重要的指导意义。
曲柄摇杆机构是一种常用的运动传递机构,通常用于将旋转运动转化为直线运动。
在判断曲柄摇杆机构是否合理时,需要考虑以下几个条件:
1. 机构的闭合性:曲柄摇杆机构必须是闭合的,即曲柄、摇杆和连杆之间必须相互连接,并且不能存在自由度。
2. 运动的可靠性:曲柄摇杆机构必须能够可靠地实现所需的运动,包括摇杆的转动和连杆的直线运动等。
3. 运动的平稳性:曲柄摇杆机构的运动应该尽可能平稳,避免出现过大的惯性力或震荡。
4. 空间的可行性:曲柄摇杆机构需要满足空间上的可行性要求,即机构的各个零件在运动过程中不会发生碰撞或干涉。
5. 设计的经济性:曲柄摇杆机构应该在结构设计上尽可能简单,以提高制造成本和维护效率。
总体来说,曲柄摇杆机构的判定条件包括机构的闭合性、运动的可靠性和平稳性、空间的可行性以及设计的经济性。
在设计和选择曲柄摇杆机构时,需要考虑这些因素,并进行合理的分析和优化。
《机械设计基础》期中考卷1一、单项选择题。
(每小题2分,共16分)1. 曲柄摇杆机构中,摇杆为主动件时,( )为死点位置。
A. 不存在B. 曲柄与连杆共线时C. 摇杆与连杆共线时D. 曲柄与机架共线时2. 为保证四杆机构良好的机械性能,( )不应小于最小许用值。
A. 压力角B. 传动角C. 极位夹角D. 啮合角3. ( )决定了从动杆的运动规律。
A. 凸轮转速B. 凸轮大小C. 凸轮形状D. 凸轮轮廓曲线4. 平面四杆机构无急回特性时( ),行程速比系数( )。
A. 压力角α=0,k>1B. 传动角β=0,k<1C. 极位夹角θ=0,k=0D. 极位夹角θ=0,k=15. 在双曲柄机构中,已知三杆长度分别为a=80mm,b=150mm,c=120mm,则d 杆长度应为( )。
A. <110mmB. 110mm≤d≤190mmC. ≥190mmD. >2006. 凸轮机构中,基圆半径是指凸轮转动中心到( )半径。
A. 理论轮廓线上的最大B. 实际轮廓线上的最大C. 实际轮廓线上的最小D. 理论轮廓线上的最小7. 凸轮机构中的压力角是指( )间的夹角。
A. 凸轮上接触点的法线与从动件的运动方向B. 凸轮上接触点的法线与该点线速度C. 轮上接触点的切线与从动件的运动方向D. 以上均不对8. 一标准直齿圆柱齿轮的周节(齿距)P=15.7mm,齿顶圆的直径为d=400mm,则该齿轮( )。
A. 82B. 78C. 80D. 76二、填空题。
(每空1分,共14分)1.两构件之间为( )接触的运动副称为低副,引入一个低副将带入( )个约束。
2.在凸轮机构从动件的常用运动规律中,( )、( )运动规律有柔性冲击。
3.采用标准齿条刀具加工标准齿轮时,其刀具的( )线与轮坯( )圆之间做纯滚动;加工变位齿轮时,其刀具的( )线与轮坯( )圆之间做纯滚动。
一对相啮合的大小齿轮齿面接触应力的关系是( ),其接触强度的关系是( )。
选择题1.平面连杆机构是由许多刚性构件通过()联接而成的机构。
①转动副②低副③高副④移动副2.在机构中,若某些构件所产生的局部运动并不影响其它构件的运动,则称这种局部运动的自由度为()。
①复合铰链②局部自由度③虚约束④机构自由度3.以曲柄为原动件时,曲柄摇杆机构最小传动角γ出现在()位置。
①曲柄与连杆共线②曲柄与摇杆共线③曲柄与机架共线④摇杆与机架共线4.通常所说的渐开线齿轮的压力角α指的是在()上的压力角。
①基圆②分度圆③齿顶圆④齿根圆5.作平面运动的三个构件共有()个瞬心,且位于同一直线上。
①3 ② 4 ③ 5 ④ 66.点或线接触的运动件副称为()A、高副B、低副C、转动副D、运动副7.凸轮机构中,具有刚性冲击的运动规律是()A、等加速,B、等减速,C、等速运动D、余弦加速度8.机构自由度计算时,应该注意的事项有()。
A、局部自由度,B、复合铰链,C、虚约束,D、上述3种都应注意9.为了使得渐开线标准直齿圆柱齿轮不根切,齿数应该()A、小于7,B、小于10,C、大于17,D、小于1710.采用飞轮可以()机器的周期性速度波动。
A、消除,B、减小,C、增大,D、产生11.速度瞬心是两构件上相对速度的瞬时重合点。
(①为零②不相等③不为零且相等)12.若标准齿轮与正变位齿轮的参数m,Z,α,h a*均相同,则后者比前者的:齿根高,分度圆直径,分度圆齿厚,分度圆齿距。
(①增大②减小③不变)13.在高速凸轮机构中,为减少冲击与振动,从动件运动规律最好选用运动规律。
(①等速②等加等减速③余弦加速度④正弦加速度)14.机械系统在考虑摩擦的情况下,克服相同生产阻力时,其实际驱动力F与理想驱动力F0的关系是:F F0。
(①小于②等于③大于④大于等于)15.差动轮系是指自由度。
(①为1的周转轮系②为2的定轴轮系③为2的周转轮系)16.设计标准齿轮时,若发现重合度过小,则修改设计时应。
(①加大模数②增加齿数③加大中心距)17.曲柄滑块机构若存在死点时,其主动件必须是,在此位置曲柄与共线。
曲柄摇杆机构工作原理
曲柄摇杆机构是一种常见的机械传动机构,它由曲柄、连杆和摇杆组成。
曲柄是一个旋转的轴,连杆是连接曲柄和摇杆的杆状物,摇杆则是一个固定在机构上的杆状物。
曲柄摇杆机构的工作原理是通过曲柄的旋转,使连杆和摇杆发生相应的运动,从而实现机械传动。
曲柄摇杆机构的工作原理可以用以下步骤来描述:
1. 曲柄旋转:曲柄是曲柄摇杆机构的核心部件,它通过电机或其他动力源的驱动,进行旋转运动。
2. 连杆运动:曲柄的旋转使得连杆发生运动,连杆的运动轨迹是一个椭圆形。
当曲柄旋转到最高点或最低点时,连杆的速度为零,这时连杆的方向会发生变化。
3. 摇杆运动:连杆的运动使得摇杆发生相应的运动。
摇杆的运动轨迹是一个弧形,它的运动方向与连杆的方向垂直。
4. 机械传动:摇杆的运动可以用来驱动其他机械部件,例如活塞、阀门等。
通过这种方式,曲柄摇杆机构可以实现机械传动的功能。
曲柄摇杆机构具有结构简单、传动效率高、运动平稳等优点,因此被广泛应用于各种机械设备中。
例如,汽车发动机中的曲轴就是一种曲柄摇杆机构,它通过连杆和摇杆的运动,将活塞的往复运动转化为旋转运动,从而驱动汽车的轮胎。
曲柄摇杆机构是一种重要的机械传动机构,它的工作原理是通过曲柄的旋转,使连杆和摇杆发生相应的运动,从而实现机械传动。
在各种机械设备中都有广泛的应用,是现代工业中不可或缺的一部分。