后方交会法计算原理
- 格式:doc
- 大小:84.50 KB
- 文档页数:2
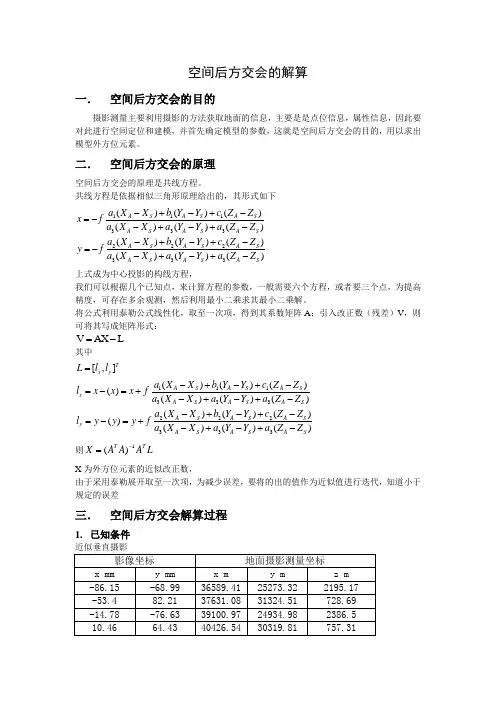
空间后方交会的解算一. 空间后方交会的目的摄影测量主要利用摄影的方法获取地面的信息,主要是是点位信息,属性信息,因此要对此进行空间定位和建模,并首先确定模型的参数,这就是空间后方交会的目的,用以求出模型外方位元素。
二. 空间后方交会的原理空间后方交会的原理是共线方程。
共线方程是依据相似三角形原理给出的,其形式如下111333222333()()()()()()()()()()()()A S A S A S A S A S A S AS A S A S A S A S A S a X X b Y Y c Z Z x f a X X a Y Y a Z Z a X X b Y Y c Z Z y f a X X a Y Y a Z Z -+-+-=--+-+--+-+-=--+-+-上式成为中心投影的构线方程,我们可以根据几个已知点,来计算方程的参数,一般需要六个方程,或者要三个点,为提高精度,可存在多余观测,然后利用最小二乘求其最小二乘解。
将公式利用泰勒公式线性化,取至一次项,得到其系数矩阵A ;引入改正数(残差)V ,则可将其写成矩阵形式:V AX L =-其中111333222333[,]()()()()()()()()()()()()()()Tx y A S A S A S x A S A S A S A S A S A S y A S A S A S L l l a X X b Y Y c Z Z l x x x fa X X a Y Y a Z Z a X Xb Y Yc Z Z l y y y fa X X a Y Y a Z Z =-+-+-=-=+-+-+--+-+-=-=+-+-+- 则1()T T X A A A L -=X 为外方位元素的近似改正数,由于采用泰勒展开取至一次项,为减少误差,要将的出的值作为近似值进行迭代,知道小于规定的误差三. 空间后方交会解算过程1. 已知条件近似垂直摄影00253.24mmx y 0f ===2. 解算程序流程图MATLAB 程序format long;s1=xlsread('data.xls');%读取数据a1=s1(1:4,1:2);%影像坐标b1=s1(1:4,3:5);%地面摄影测量坐标a2=s1.*10^-3;%影像坐标单位转化j1=a2(1,:)-a2(2,:);j2=j1(1,1)^2+j1(1,2)^2;lengh_a1=sqrt(j2); %相片某一长度j1=b1(1,:)-b1(1,:);j2=j1(1,1)^2+j1(1,2)^2;lengh_b1=sqrt(j2); %地面对应的长度m=lengh_b1/lengh_a1;%求出比例尺n0=0;p0=0;q0=0;x0=mean(b1(:,1));y0=mean(b1(:,2));f=153.24*10^-3;z0=m*f;x001={x0,x0,x0,x0};X0=cell2mat(x001)';y001={y0,y0,y0,y0};Y0=cell2mat(y001)';z001={z0,z0,z0,z0};Z0=cell2mat(z001)';%初始化外方位元素的值aa1=cos(n0)*cos(q0)-sin(n0)*sin(p0)*sin(q0);aa2=-sin(q0)*cos(n0)-sin(n0)*sin(p0)*cos(q0);aa3=-sin(n0)*cos(p0);bb1=sin(q0)*cos(p0);bb2=cos(q0)*cos(p0);bb3=-sin(p0);cc1=sin(n0)*cos(q0)+sin(p0)*cos(n0)*sin(q0);cc2=-sin(n0)*sin(q0)+sin(p0)*cos(q0)*cos(n0);cc3=cos(n0)*cos(p0);%计算改正数XX1=aa1.*(b1(:,1)-X0)+bb1.*(b1(:,2)-Y0)+cc1.*(b1(:,3)-Z0); XX2=aa2.*(b1(:,1)-X0)+bb2.*(b1(:,2)-Y0)+cc2.*(b1(:,3)-Z0); XX3=aa3.*(b1(:,1)-X0)+bb3.*(b1(:,2)-Y0)+cc3.*(b1(:,3)-Z0); lx=a1(:,1)+f.*(XX1./XX3);ly=a1(:,2)+f.*(XX2./XX3);l={lx',ly'};L=cell2mat(l)';%方程系数A=[-3.969*10^-5 0 2.231*10^-5 -0.2 -0.04 -0.06899;0 -3.969*10^-5 1.787*10^-5 -0.04 -0.18 0.08615;-2.88*10^-5 0 1*10^-5 -0.17 0.03 0.08211;0 -2.88*10^-5 -1.54*10^-5 0.03 -0.2 0.0534;-4.14*10^-5 0 4*10^-6 -0.15 -7.4*10^-3 -0.07663;0 -4.14*10^-5 2.07*10^-5 -7.4*10^-3 -0.19 0.01478;-2.89*10^-5 0 -1.98*10^-6 -0.15 -4.4*10^-3 0.06443;0 -2.89*10^-5 -1.22*10^-5 -4.4*10^-3 -0.18 0.01046];%L=[-1.28 3.78 -3.02 -1.45 -4.25 4.98 -4.72 -0.385]'.*10^-2; %第一次迭代X=inv(A'*A)*A'*L;3.结果X=1492.41127406195-554.4015671761941425.68660973544-0.0383847815608609 0.00911624039769785 -0.105416434087641S=1492.41127406195-554.401567176194 1425.68660973544 38436.9616152184 27963.1641162404-0.105416434087641。
后方交会残差值误差范围后方交会是摄影测量中常用的一种方法,用于确定地面上各个点的空间坐标。
在实际应用中,由于各种误差的存在,后方交会的结果会产生一定的残差值误差。
误差范围的确定对于保证测量结果的准确性和可靠性非常重要。
本文将从后方交会的基本原理、误差来源、误差计算方法以及误差范围的确定等方面进行详细的分析和论述。
一、后方交会的基本原理后方交会是一种基于像对几何关系的摄影测量方法,通过对各个像点的位置测量和相对方位角的观测,计算出地面控制点的空间坐标。
其基本原理可以简述如下:1. 反投影原理:根据像点在像空间上的位置,利用摄影测量的几何关系反推出这些像点所对应的地面点在物空间上的位置。
反投影原理是后方交会的理论基础,也是误差产生的根源。
2. 控制点观测:确定一定数量的控制点,并测量其像点位置及相对方位角。
控制点的选择应满足精度要求和实际情况,通常采用地面测量或其他摄影测量方法进行。
3. 几何模型:根据反投影原理和控制点观测,建立几何模型,描述像空间与物空间之间的几何关系。
模型包括相机的内外参数、像点的位置和相对方位角等。
4. 误差方程:利用几何模型,建立误差方程,将测量值与真实值之间的误差表示出来。
误差方程是分析误差来源、计算误差范围的基础。
二、后方交会误差的来源后方交会的误差主要来自于以下几个方面:1. 相机内外参数的误差:相机的内外参数是后方交会的重要参数,包括焦距、主点位置、旋转矩阵、平移向量等。
由于摄影测量设备和仪器的制造和使用限制,这些参数会存在误差,从而影响后方交会的结果。
2. 观测误差:观测误差包括控制点的像点测量误差和方位角观测误差。
像点测量误差可以由像点测量精度来描述,方位角观测误差可以由方位角观测精度来描述。
观测误差是由测量设备、操作人员和环境等因素共同引起的。
3. 地面控制点的精度:后方交会的精度还受到地面控制点的精度限制。
如果地面控制点的精度较差,那么后方交会的精度也会受到影响。
后方交会-解释是工程测量中一种比较常用的一种测量方法.主要是通过两个或多已知点测量一个未知点.测角定位-正文利用测角仪器观测角度,以确定被测点位置的一种方法。
一般观测两个角,则有两条位置线,两线交点即为被测点位置。
在海洋测量中,测角定位通常使用的方法有:后方交会法,一般使用三标两角法,有时使用四标三角法,即在被测点上使用测角仪器观测3个或4个已知目标之间的夹角来确定点位;前方交会法,在两个或两个以上已知点上用测角仪器同时观测各已知点到某一被测点的夹角来确定点位;侧方交会法,综合使用后方交会法和前方交会法来实现定位的方法。
另外,还有一距离一方位法,也是通过测角测定方位和距离实现定位的。
因为测角仪器大部分是目视光学仪器,所以作用距离近,只适于近岸测量使用。
控制测量-正文在一定的区域内为地形测图或工程测量建立控制网(区域控制网)所进行的测量工作。
分为平面控制测量和高程控制测量。
平面控制网与高程控制网一般分别单独布设,也可以布设成三维控制网。
控制网具有控制全局,限制测量误差累积的作用,是各项测量工作的依据。
对于地形测图,等级控制是扩展图根控制的基础,以保证所测地形图能互相拼接成为一个整体。
对于工程测量,常需布设专用控制网,作为施工放样和变形观测的依据。
平面控制网常用三角测量、导线测量、三边测量和边角测量等方法建立。
三角测量是建立平面控制网的基本方法之一。
但三角网(锁)要求每点与较多的邻点相互通视,在隐蔽地区常需建造较高的觇标。
导线测量布设简单,每点仅需与前后两点通视,选点方便,特别是在隐蔽地区和建筑物多而通视困难的城市,应用起来方便灵活。
随着电磁波测距仪的发展,导线测量的应用日益广泛。
三边测量要求丈量网中所有的边长。
应用电磁波测距仪测定边长后即可进行解算。
此法检核条件少,推算方位角的精度较低。
边角测量法既观测控制网的角度,又测量边长。
测角有利于控制方向误差,测边有利于控制长度误差。
边角共测可充分发挥两者的优点,提高点位精度。
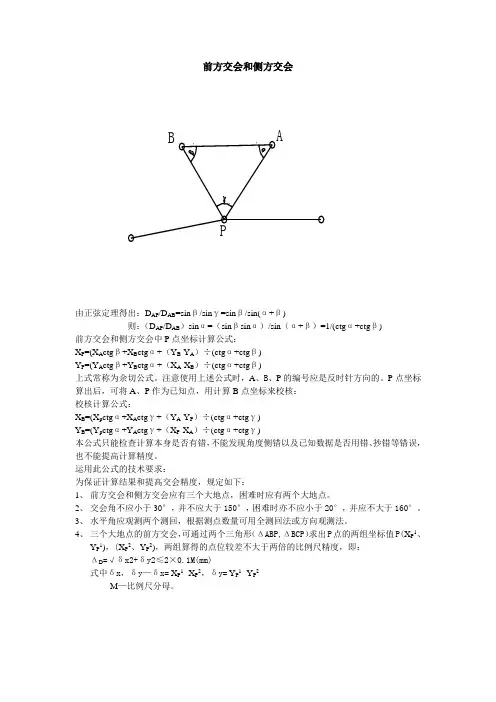
前方交会和侧方交会由正弦定理得出:D AP/D AB=sinβ/sinγ=sinβ/sin(α+β)则:(D AP/D AB)sinα=(sinβsinα)/sin(α+β)=1/(ctgα+ctgβ)前方交会和侧方交会中P点坐标计算公式:X P=(X A ctgβ+X B ctgα+(Y B-Y A)÷(ctgα+ctgβ)Y P=(Y A ctgβ+Y B ctgα+(X A-X B)÷(ctgα+ctgβ)上式常称为余切公式。
注意使用上述公式时,A、B、P的编号应是反时针方向的。
P点坐标算出后,可将A、P作为已知点,用计算B点坐标来校核:校核计算公式:X B=(X p ctgα+X A ctgγ+(Y A-Y P)÷(ctgα+ctgγ)Y B=(Y p ctgα+Y A ctgγ+(X P-X A)÷(ctgα+ctgγ)本公式只能检查计算本身是否有错,不能发现角度侧错以及已知数据是否用错、抄错等错误,也不能提高计算精度。
运用此公式的技术要求:为保证计算结果和提高交会精度,规定如下:1、前方交会和侧方交会应有三个大地点,困难时应有两个大地点。
2、交会角不应小于30°,并不应大于150°,困难时亦不应小于20°,并应不大于160°。
3、水平角应观测两个测回,根据测点数量可用全测回法或方向观测法。
4、三个大地点的前方交会,可通过两个三角形(ΔABP,ΔBCP)求出P点的两组坐标值P(X P1、Y P1),(X P2、Y P2),两组算得的点位较差不大于两倍的比例尺精度,即:ΔD=√δx2+δy2≤2×0.1M(mm)式中δx,δy—δx= X P1- X P2,δy= Y P1 -Y P2M—比例尺分母。
后方交会B如图所示,A、B、C是已知三角点,P点是导线点,将仪器安置在P点上,观测P至A、B、C各个方向之间的水平夹角α、β,然后根据已知三角点的坐标,可解算P点坐标。
5.方茴说:"那时候我们不说爱,爱是多么遥远、多么沉重的字眼啊。
我们只说喜欢,就算喜欢也是偷偷摸摸的。
"6.方茴说:"我觉得之所以说相见不如怀念,是因为相见只能让人在现实面前无奈地哀悼伤痛,而怀念却可以把已经注定的谎言变成童话。
"7.在村头有一截巨大的雷击木,直径十几米,此时主干上唯一的柳条已经在朝霞中掩去了莹光,变得普普通通了。
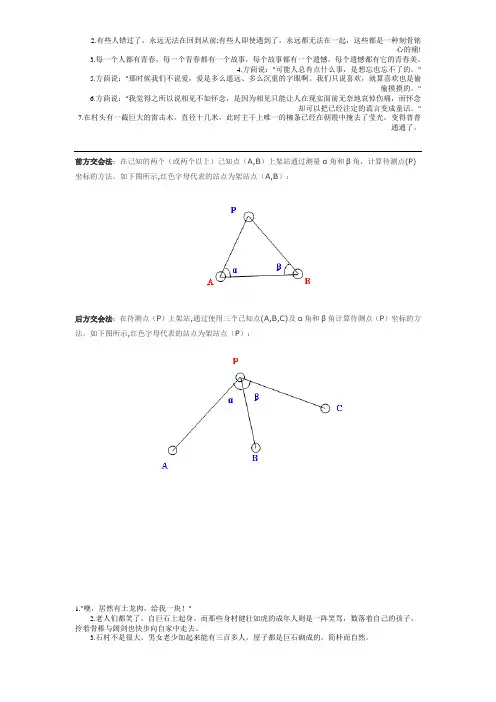
前方交会法:在己知的两个(或两个以上)己知点(A,B)上架站通过测量α角和β角,计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(A,B):后方交会法:在待测点(P)上架站,通过使用三个己知点(A,B,C)及α角和β角计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(P):1."噢,居然有土龙肉,给我一块!"2.老人们都笑了,自巨石上起身。
而那些身材健壮如虎的成年人则是一阵笑骂,数落着自己的孩子,拎着骨棒与阔剑也快步向自家中走去。
5.方茴说:"那时候我们不说爱,爱是多么遥远、多么沉重的字眼啊。
我们只说喜欢,就算喜欢也是偷偷摸摸的。
"6.方茴说:"我觉得之所以说相见不如怀念,是因为相见只能让人在现实面前无奈地哀悼伤痛,而怀念却可以把已经注定的谎言变成童话。
"7.在村头有一截巨大的雷击木,直径十几米,此时主干上唯一的柳条已经在朝霞中掩去了莹光,变得普普通通了。
一、引言在工程测量中,内业资料计算占有很重要的比重,内业资料计算的准确无误与速度直接决定了测量工作是否能够快速、顺利地完成。
而内业资料的计算方法及其所需达到的精度,则又直接取决于外业所用仪器及具体的放样目标和内业计算所用到的办公软件和计算方法。
计算机辅助设计(Computer Aid Design 简写CAD,常称AutoCAD)是20世纪80年代初发展起来的一门新兴技术型应用软件。
如今在各个领域均得到了普遍的应用。
测绘技术中的交会定位原理与应用测绘是一门关于测量、绘制和分析地球表面特征的学科。
在测绘过程中,交会定位是一种基本的测量手段,它通过多个已知点和测量点之间的交会,来确定测量点的位置。
本文将介绍测绘技术中的交会定位原理与应用。
一、交会定位原理交会定位依赖于三角测量原理,即利用三角形的几何关系来计算未知点的坐标。
在交会定位中,需要至少三个已知点和它们与未知点的观测角度或观测距离。
根据测量数据,可以利用三角计量学的原理计算未知点的坐标。
交会定位方法有几种,其中最常用的是三角定位法和后方交会法。
1. 三角定位法三角定位法是一种基于三角形的几何关系来计算未知点坐标的方法。
在三角定位法中,需要至少三个已知点和它们与未知点的观测角度。
通过测量角度并利用正弦定理和余弦定理,在已知点与未知点之间建立三角形,从而计算未知点的坐标。
2. 后方交会法后方交会法是一种基于已知点和未知点之间的观测距离来计算未知点坐标的方法。
在后方交会法中,需要至少三个已知点和它们与未知点的观测距离。
通过测量距离和利用三角形的几何关系,在已知点与未知点之间建立三角形,从而计算未知点的坐标。
二、交会定位应用交会定位在测绘领域有着广泛的应用。
下面将介绍交会定位在工程测绘、地理信息系统(GIS)和导航系统中的应用。
1. 工程测绘在工程测绘中,交会定位被广泛应用于建筑工程和道路工程等。
通过利用交会定位法,可以确定建筑物或道路的地理位置和空间坐标。
这对于规划、设计和施工都有着重要的意义,可以保证工程施工的准确性和高效性。
2. 地理信息系统(GIS)GIS是一种将地理空间信息和属性信息进行整合、管理和分析的系统。
交会定位在GIS中起着至关重要的作用。
通过将已知点的坐标信息输入到GIS系统中,可以通过交会定位方法计算出未知点的坐标信息。
这对于地图编制、资源管理和空间分析等方面都具有重要意义。
3. 导航系统导航系统是一种用于定位和导航的技术系统。
交会定位在导航系统中被广泛应用于车载导航、航空导航和船舶导航等。
后方交会测量原理及其程序实现
摘要本文针对后方交会测量原理的定义、意义进行了概述,并归纳总结了后方交会测量原理的3种常见情况。
然后利用Visual Basic 6.0软件作为平台,对这3种情况进行了程序实现。
关键词后方交会;余弦定理;测边交会;边角交会;Visual Basic 6.0
0 引言
随着计算机的广泛普及和各种计算机语言的不断完善,利用计算机语言编制一些测量中常用的程序,以此来解决实地工作中的计算问题,深获测绘工作者的青睐。
本文总结了后方交会测量原理的几种情况,并尝试利用Visual Basic 6.0编写了后方交会测量原理的计算程序,在实地工作中得到了很好的应用。
1 后方交会测量原理
1.1 余切公式
根据A、B、C三个已知点的坐标(XA,YA)、(X B ,YB)、(XC,YC)及两个水平观测角α、β,计算出已知点到未知点的坐标方位角(这里以αBP 为例)。
然后根据这个坐标方位角及已知坐标增量和α、β角求出已知点到未知点的坐标增量,最后求得未知点的坐标XP,YP。
由图1可知,CP、BP、AP三条直线的方程式为
式中:为B点至P点的坐标方位角;
为A点坐标;
为B点坐标;
为C点坐标;
为P点坐标。
类似的计算方法还有赫尔默特公式(重心公式)等,这里就不再详述。
在此特别强调后方交会危险圆的问题:如图2所示,当未知点P在3个已知点所在的圆上移动时,总有下列式子成立,
即α和β固定不变,它说明此时仅有α、β这两个角和3个已知点不能唯一确定P点位置,因此称3个已知点所在的圆为后方交会危险圆。
当P点位于危险圆时,无论用何种后方交会公式,均无法求出P点坐标。
全站仪后方交会法原理全站仪后方交会法是一种常用的测量方法,被广泛应用于各种建筑、地质勘探、铁路、公路工程等领域。
它是利用自然射线和人工瞄准目标的方式进行的,通过测量各个测站之间的距离、角度和高差,从而确定目标点的坐标。
本文将对全站仪后方交会法的原理进行详细介绍,以期对相关科研工作者提供指导意义。
一、什么是后方交会法全站仪后方交会法是一种基于角度与距离测量的三角测量方法,通过测量两个已知点和一个未知点的夹角和距离,推断出未知点的位置坐标。
这种测量方法具有精度高、精度稳定、操作简便等优点,因此被广泛地应用于各种建筑、地质勘探、铁路、公路工程等领域。
二、后方交会法原理后方交会法的原理是利用三角形余弦定理,确定目标点的坐标。
在测量中,需要先建立一个三角形,其中包含了目标点、两个测站以及三个角度和对应的三条边长。
接着,通过测量这些角度和边长,就可以利用三角形余弦定理求出目标点的坐标。
具体步骤如下:1.选择两个已知点作为起点和终点,并测量它们之间的角度和距离。
2.使用全站仪测量目标点和起点、终点的夹角,并记录下这些角度。
3.使用全站仪测量目标点到起点、终点的距离,并记录下这些距离。
4.根据三角形余弦定理,计算出目标点的坐标。
具体地,设起点和终点的坐标分别为(Ax,Ay,Az)和(Bx,By,Bz),目标点与起点、终点的距离分别为d1、d2、d3,目标点到起点和终点的夹角分别为角度α、β,则目标点的坐标为X = Ax + d1 × cosαY = Ay + d1 × sinαZ = Az + h其中,h为目标点的高程。
三、后方交会法的应用范围后方交会法具有很广泛的应用范围,包括建筑、地质勘探、路桥工程、管线工程、矿山开采等各个领域。
在建筑工程中,可以利用后方交会法对建筑物的位置、高度等进行精确的测量,保证建筑物的结构稳定和使用安全。
在地质勘探中,可以利用后方交会法对地质构造进行研究,提高勘探效率。
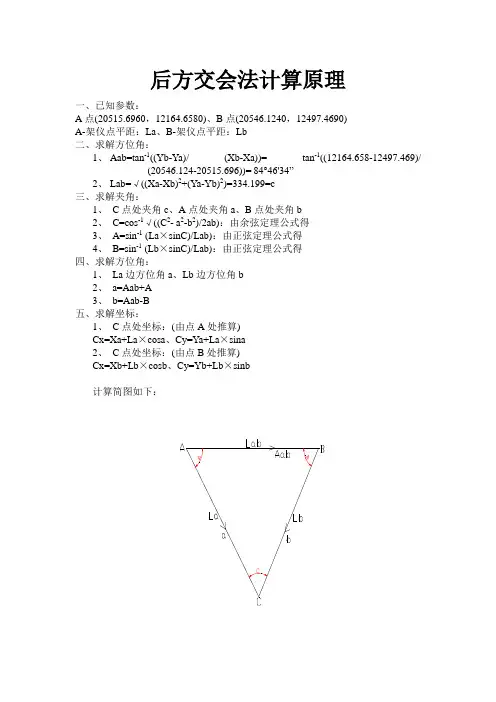
后方交会法计算原理一、已知参数:A点(20515.6960,12164.6580)、B点(20546.1240,12497.4690)A-架仪点平距:La、B-架仪点平距:Lb二、求解方位角:1、Aab=tan-1((Yb-Ya)/ (Xb-Xa))= tan-1((12164.658-12497.469)/(20546.124-20515.696))=84°46'34”2、Lab=√((Xa-Xb)2+(Ya-Yb)2)=334.199=c三、求解夹角:1、C点处夹角c、A点处夹角a、B点处夹角b2、C=cos-1√((C2- a2-b2)/2ab):由余弦定理公式得3、A=sin-1 (La×sinC)/Lab):由正弦定理公式得4、B=sin-1 (Lb×sinC)/Lab):由正弦定理公式得四、求解方位角:1、La边方位角a、Lb边方位角b2、a=Aab+A3、b=Aab-B五、求解坐标:1、C点处坐标:(由点A处推算)Cx=Xa+La×cosa、Cy=Ya+La×sina2、C点处坐标:(由点B处推算)Cx=Xb+Lb×cosb、Cy=Yb+Lb×sinb计算简图如下:斜交放样方法:一、已知参数1、A点桩号:A2、斜距离:S3、斜交角:a二、求解路线右幅:Δx=S×sina、Δy=S×cosa 右幅桩号=A+Δy、边距=Δx 三、求解路线左幅:Δx=S×sina、Δy=S×cosa 右幅桩号=A-Δy、边距=Δx计算简图:。
后方交会法测量在公路工程中的应用摘要:随着公路工程技术标准的不断提高以及各类信息化测量设备的革新、计算机技术在工程测量中广泛的推广应用,致使公路测量从理论到实践都发生了很大变革。
GPS全球卫星定位系统技术和全站仪等技术越来越成熟。
因此在道路施工测量中,光电测距仪和全站仪的使用成为必然。
一般设计院给定的控制点不能覆盖整个施工区域,因此施工单位需根据设计院提供的控制点进行施工控制网加密。
在加密控制网时,选点必须满足导线边长宜大致相等、测角满足规范要求,所以一般选择地势较高、通视条件良好、土质坚实、便于保存的点来作为导线控制点。
在具体施工过程中,由于地形地貌的变化及个别控制点的破坏或丢失,导线控制点与放样点之间无法通视,给工程测量带来很大困难。
本文针对这种情况,讨论后方交会法在实际施工过程中的应用。
关键词:后方交会全站仪测量带函数计算器应用一、工程中常见的问题1、导线控制点作为测站,由于曲线和测站中间出现障碍物,曲线放样需要连续设几次测站才能把整个曲线放样完成。
临时测站过多,会导致户外作业时间长,处理数据繁琐,并且会因误差累积,造成精确度不能满足要求。
如图12、利用导线控制点作为测站,由于路基填方,路基边沟等防护工程造成不通视无法放样。
如图23、施工过程中两导线点间出现障碍物不通视,无法放样如图3二、解决方法通过对后方交会法原理的研究,如何更好的解决以上几个工程测量放样中经常遇到的问题。
1、后方交会法原理:选择与已知两个控制点通视、距离大致相等且与拟放样点通视条件良好的点作为交会点,并通过交会点进行施工测量放样。
根据经验交会角度不能小于15度和大于165度、更不能再一条直线上或者三角关系危险圆上。
四、在工程中的实际应用在新长线CB6合同段对K21+800~K22+300段放样时,段内J7、J8导线控制点与曲线放样点之间有麦场无法通视,如果采用J10、J11导线放样因距离过远会造成误差过大,采用常规方法须设置几个临时导线点将坐标引致放样区域。
实验报告班级:测绘一班学号:日期:目录一、计算原理 (3)二、算法流程 (4)三、源程序 (5)四、计算结果 (13)五、结果分析 (13)六、心得体会 (13)一、计算原理已知条件摄影机主距f=,x0=,y0=, 像片比例尺为1:40000,有四对点的像点坐标与相应的地面坐标如下表。
以单像空间后方交会方法,求解该像片的外方位元素。
二、算法流程(1)获取已知数据。
从航摄资料中差取平均航高与摄影机主距;获取控制点的地面测量坐标并转换为地面摄影坐标。
(2)量测控制点的像点坐标并作系统误差改正。
(3)确定未知数的初始值。
在竖直摄影且地面控制点大体对称分布的情况下,按如下方法确定初始值,即nX XS∑=0,nY YS∑=,∑+=Z nmf Z S10000===κωϕ(4)用三个角元素的初始值按下式,计算各个方向余弦值,组成旋转矩阵Rωϕκωϕκϕκωϕκϕωκωκωωϕκωϕκϕκωϕκϕcos cos cos sin cos sin sin sin sin cos cos sin sin cos cos sin cos cos sin cos sin sin sin cos sin sin sin cos cos 321321321=+-=+=-===-=--=-=c c c b b b a a a(5)逐点计算像点坐标的近似值。
利用未知数的近似值和控制点的地面坐标;带入共线方程式,逐点近似像点坐标的近似值(x )、(y )。
(6)逐点计算误差方程式的系数和常数项,组成误差方程式。
(7)计算法方程的系数矩阵A A T 和常数项L A L ,组成法方程式。
(8) 解法方程,求得外方位元素的改正数κωϕd d d d d d 、、、、、S S S Z Y X 。
(9)用前次迭代取得的近似值,加本次迭代的改正数,计算外方位元素的新值。
KS K S K S K S K S K S K S K S K S dZ Z Z dY Y Y dX X X +=+=+=---111,,K K K K K K K K K d d d κκκωωωϕϕϕ+=+=+=---111,,(10)将求得的外方位元素改正数与规定的限差比较,若小于限差,则迭代结束。
后方交会法原理在测量领域中,后方交会法是一种常用的方法,它可以用于确定已知控制点的位置以及未知点的坐标。
后方交会法是基于三角形相似原理的测量技术,它可以通过对已知控制点的距离和方位角度的测量,来计算出未知点的坐标。
本文将详细介绍后方交会法的原理和应用。
一、后方交会法原理后方交会法是基于三角形相似原理的测量技术,它是通过已知控制点的位置和方位角度的测量,来计算未知点的坐标。
具体来说,后方交会法的原理包括以下几个步骤:1.测量控制点的位置和方位角度在后方交会法中,需要测量已知控制点的位置和方位角度。
控制点是已知坐标的点,通常是在测量区域的边界或者是在地面上的显著点。
测量控制点位置的方法有很多种,包括全站仪、GPS等。
方位角度是指测量点相对于一个已知方向的角度,可以通过全站仪或者经纬仪等测量仪器来测量。
2.测量未知点与控制点之间的距离和角度在已知控制点的基础上,需要测量未知点与控制点之间的距离和角度。
距离可以通过测距仪等仪器来测量,角度可以通过全站仪等仪器来测量。
需要注意的是,测量时需要保证控制点与未知点之间的视线畅通,以确保测量的准确性。
3.计算未知点的坐标通过已知控制点的坐标、方位角度和未知点与控制点之间的距离和角度,可以利用三角形相似原理来计算未知点的坐标。
具体计算公式如下:X = X0 + L * sin(A + α)Y = Y0 + L * cos(A + α)其中,X0和Y0是已知控制点的坐标,A是控制点与未知点之间的方位角度,α是未知点与控制点之间的角度,L是未知点与控制点之间的距离。
通过以上公式,可以计算出未知点的坐标。
二、后方交会法的应用后方交会法在测量领域中应用广泛,可以用于确定已知控制点的位置以及未知点的坐标。
以下是后方交会法的一些应用场景:1.地形测量在地形测量中,后方交会法可以用于确定山顶、山脚、河流等地形特征点的坐标。
通过测量已知控制点的位置和方位角度,以及未知点与控制点之间的距离和角度,可以计算出未知点的坐标,从而确定地形特征点的位置。
后方交会法计算原理
一、已知参数:
A点(20515.6960,12164.6580)、B点(20546.1240,12497.4690)
A-架仪点平距:La、B-架仪点平距:Lb
二、求解方位角:
1、Aab=tan-1((Yb-Y a)/ (Xb-Xa))= tan-1((12164.658-12497.469)/
(20546.124-20515.696))=84°46'34”
2、Lab=√((Xa-Xb)2+(Y a-Yb)2)=334.199=c
三、求解夹角:
1、C点处夹角c、A点处夹角a、B点处夹角b
2、C=cos-1√((C2- a2-b2)/2ab):由余弦定理公式得
3、A=sin-1 (La×sinC)/Lab):由正弦定理公式得
4、B=sin-1 (Lb×sinC)/Lab):由正弦定理公式得
四、求解方位角:
1、La边方位角a、Lb边方位角b
2、a=Aab+A
3、b=Aab-B
五、求解坐标:
1、C点处坐标:(由点A处推算)
Cx=Xa+La×cosa、Cy=Ya+La×sina
2、C点处坐标:(由点B处推算)
Cx=Xb+Lb×cosb、Cy=Yb+Lb×sinb
计算简图如下:
斜交放样方法:
一、已知参数
1、A点桩号:A
2、斜距离:S
3、斜交角:a
二、求解路线右幅:
Δx=S×sina、Δy=S×cosa 右幅桩号=A+Δy、边距=Δx 三、求解路线左幅:
Δx=S×sina、Δy=S×cosa 右幅桩号=A-Δy、边距=Δx
计算简图:。