距离后方交会计算
- 格式:doc
- 大小:22.00 KB
- 文档页数:1
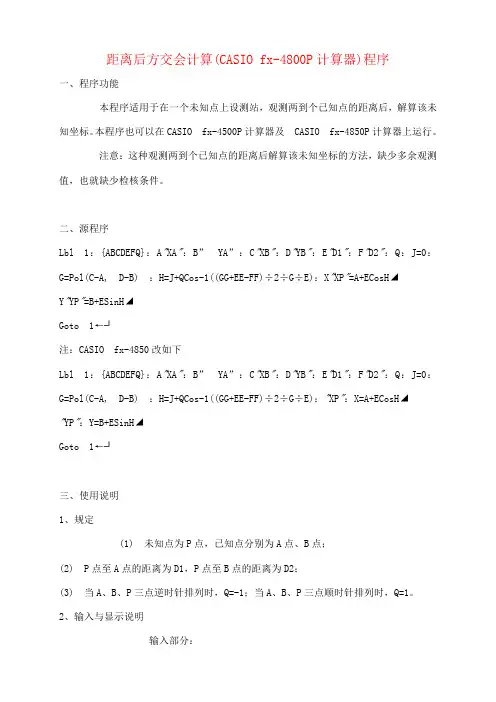
距离后方交会计算(CASIO fx-4800P计算器)程序一、程序功能本程序适用于在一个未知点上设测站,观测两到个已知点的距离后,解算该未知坐标。
本程序也可以在CASIO fx-4500P计算器及 CASIO fx-4850P计算器上运行。
注意:这种观测两到个已知点的距离后解算该未知坐标的方法,缺少多余观测值,也就缺少检核条件。
二、源程序Lbl 1:{ABCDEFQ}:A"XA":B”YA”:C"XB":D"YB":E"D1":F"D2":Q:J=0:G=Pol(C-A, D-B) :H=J+QCos-1((GG+EE-FF)÷2÷G÷E):X"XP"=A+ECosH◢Y"YP"=B+ESinH◢Goto 1←┘注:CASIO fx-4850改如下Lbl 1:{ABCDEFQ}:A"XA":B”YA”:C"XB":D"YB":E"D1":F"D2":Q:J=0:G=Pol(C-A, D-B) :H=J+QCos-1((GG+EE-FF)÷2÷G÷E):"XP":X=A+ECosH◢"YP":Y=B+ESinH◢Goto 1←┘三、使用说明1、规定(1) 未知点为P点,已知点分别为A点、B点;(2) P点至A点的距离为D1,P点至B点的距离为D2;(3) 当A、B、P三点逆时针排列时,Q=-1;当A、B、P三点顺时针排列时,Q=1。
2、输入与显示说明输入部分:XA ? 输入A点的X坐标YA ?输入A点的Y坐标XB ? 输入B点的X坐标YB ?输入B点的Y坐标D1 ?输入P点至A点的距离为D1D2 ?输入P点至B点的距离为D2Q ?输入A、B、P三点排列方式(逆时针时,Q=-1;顺时针时,Q=1)显示部分:XP=×××所求点P的X坐标YP=×××所求点P的Y坐标四、算例已知XA=539.3551,YB=602.9159,Xb=433.0034,YB=1087.4213,D1=380.7996,D2=245.8664,A、B、P三点排列方式为逆时针(Q=-1),求P点的坐标。
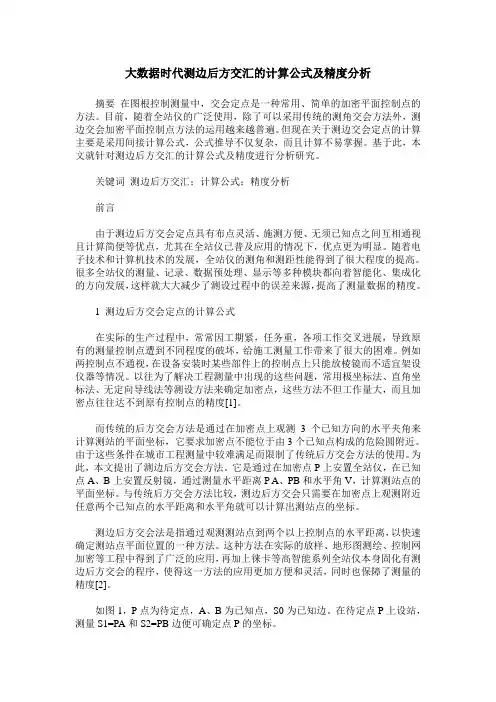
大数据时代测边后方交汇的计算公式及精度分析摘要在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
基于此,本文就针对测边后方交汇的计算公式及精度进行分析研究。
关键词测边后方交汇;计算公式;精度分析前言由于测边后方交会定点具有布点灵活、施测方便、无须已知点之间互相通视且计算简便等优点,尤其在全站仪已普及应用的情况下,优点更为明显。
随着电子技术和计算机技术的发展,全站仪的测角和测距性能得到了很大程度的提高。
很多全站仪的测量、记录、数据预处理、显示等多种模块都向着智能化、集成化的方向发展,这样就大大减少了测设过程中的误差来源,提高了测量数据的精度。
1 测边后方交会定点的计算公式在实际的生产过程中,常常因工期紧,任务重,各项工作交叉进展,导致原有的测量控制点遭到不同程度的破坏,给施工测量工作带来了很大的困难。
例如两控制点不通视,在设备安装时某些部件上的控制点上只能放棱镜而不适宜架设仪器等情况。
以往为了解决工程测量中出现的这些问题,常用极坐标法、直角坐标法、无定向导线法等测设方法来确定加密点,这些方法不但工作量大,而且加密点往往达不到原有控制点的精度[1]。
而传统的后方交会方法是通过在加密点上观测3个已知方向的水平夹角来计算测站的平面坐标,它要求加密点不能位于由3个已知点构成的危险圆附近。
由于这些条件在城市工程测量中较难满足而限制了传统后方交会方法的使用。
为此,本文提出了测边后方交会方法。
它是通过在加密点P上安置全站仪,在已知点A、B上安置反射镜,通过测量水平距离P A、PB和水平角V,计算测站点的平面坐标。
与传统后方交会方法比较,测边后方交会只需要在加密点上观测附近任意两个已知点的水平距离和水平角就可以计算出测站点的坐标。
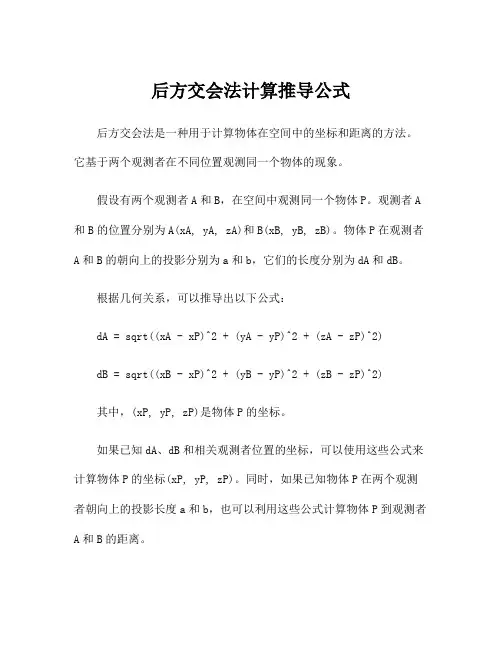
后方交会法计算推导公式后方交会法是一种用于计算物体在空间中的坐标和距离的方法。
它基于两个观测者在不同位置观测同一个物体的现象。
假设有两个观测者A和B,在空间中观测同一个物体P。
观测者A 和B的位置分别为A(xA, yA, zA)和B(xB, yB, zB)。
物体P在观测者A和B的朝向上的投影分别为a和b,它们的长度分别为dA和dB。
根据几何关系,可以推导出以下公式:dA = sqrt((xA - xP)^2 + (yA - yP)^2 + (zA - zP)^2)dB = sqrt((xB - xP)^2 + (yB - yP)^2 + (zB - zP)^2)其中,(xP, yP, zP)是物体P的坐标。
如果已知dA、dB和相关观测者位置的坐标,可以使用这些公式来计算物体P的坐标(xP, yP, zP)。
同时,如果已知物体P在两个观测者朝向上的投影长度a和b,也可以利用这些公式计算物体P到观测者A和B的距离。
需要注意的是,后方交会法在实际应用中可能会受到观测误差的影响,因此在计算时需要考虑这些误差,并采取合适的数据处理和精度控制方法。
拓展:后方交会法是测量和定位的重要方法之一,广泛应用于地理测量、摄影测量、建筑工程等领域。
它可以通过精确的测量和计算,确定物体在三维空间中的准确位置和形状,对于工程设计、地理信息系统等具有重要的实际应用价值。
除了后方交会法,还有其他一些方法可以用于测量和定位物体的坐标和距离,比如三角测量法、三角高程测量法、全站仪测量法等。
每种方法都有其适用的场景和局限性,根据具体的测量需求和条件选择合适的方法是非常重要的。
此外,随着科技的进步和发展,新的测量和定位技术不断涌现,为实现更精确和高效的测量和定位提供了更多的选择。
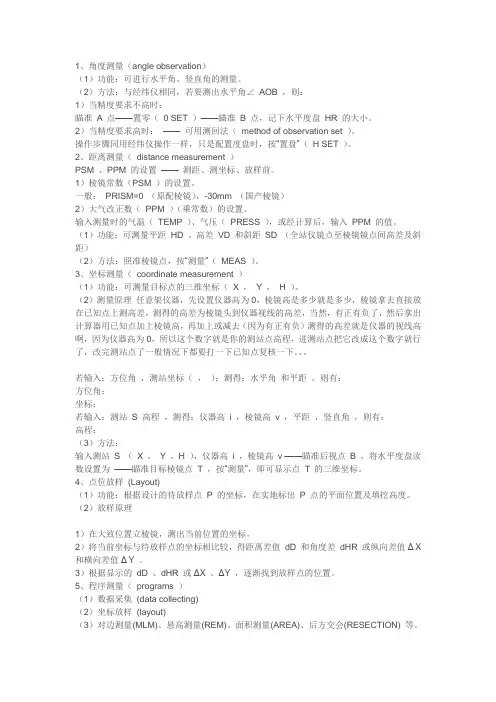
1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB ,则:1)当精度要求不高时:瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。
2)当精度要求高时:——可用测回法(method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。
2、距离测量(distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般:PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数(PPM )(乘常数)的设置。
输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。
(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS )。
3、坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
4、点位放样(Layout)?(1)功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度。
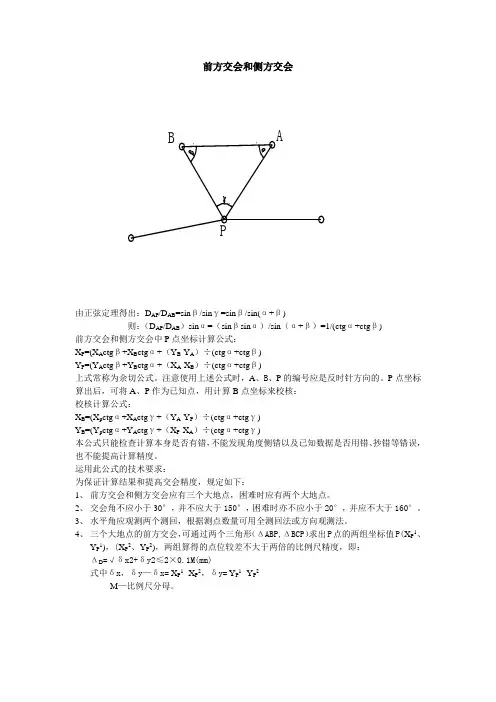
前方交会和侧方交会由正弦定理得出:D AP/D AB=sinβ/sinγ=sinβ/sin(α+β)则:(D AP/D AB)sinα=(sinβsinα)/sin(α+β)=1/(ctgα+ctgβ)前方交会和侧方交会中P点坐标计算公式:X P=(X A ctgβ+X B ctgα+(Y B-Y A)÷(ctgα+ctgβ)Y P=(Y A ctgβ+Y B ctgα+(X A-X B)÷(ctgα+ctgβ)上式常称为余切公式。
注意使用上述公式时,A、B、P的编号应是反时针方向的。
P点坐标算出后,可将A、P作为已知点,用计算B点坐标来校核:校核计算公式:X B=(X p ctgα+X A ctgγ+(Y A-Y P)÷(ctgα+ctgγ)Y B=(Y p ctgα+Y A ctgγ+(X P-X A)÷(ctgα+ctgγ)本公式只能检查计算本身是否有错,不能发现角度侧错以及已知数据是否用错、抄错等错误,也不能提高计算精度。
运用此公式的技术要求:为保证计算结果和提高交会精度,规定如下:1、前方交会和侧方交会应有三个大地点,困难时应有两个大地点。
2、交会角不应小于30°,并不应大于150°,困难时亦不应小于20°,并应不大于160°。
3、水平角应观测两个测回,根据测点数量可用全测回法或方向观测法。
4、三个大地点的前方交会,可通过两个三角形(ΔABP,ΔBCP)求出P点的两组坐标值P(X P1、Y P1),(X P2、Y P2),两组算得的点位较差不大于两倍的比例尺精度,即:ΔD=√δx2+δy2≤2×0.1M(mm)式中δx,δy—δx= X P1- X P2,δy= Y P1 -Y P2M—比例尺分母。
后方交会B如图所示,A、B、C是已知三角点,P点是导线点,将仪器安置在P点上,观测P至A、B、C各个方向之间的水平夹角α、β,然后根据已知三角点的坐标,可解算P点坐标。
全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
后方交会原理
后方交会原理是指在地图上已知两点的坐标,通过测量这两点
到另外一个点的水平角和垂直角,然后计算出该点的坐标的方法。
后方交会原理是实地测量中常用的一种方法,它可以帮助测量员准
确地确定某一点的坐标,为工程测量提供了重要的依据。
在进行后方交会时,首先需要确定已知点的坐标,然后通过测
量仪器测量出待求点到已知点的水平角和垂直角。
接下来,根据已
知点的坐标和测量得到的角度信息,利用三角函数关系进行计算,
最终得出待求点的坐标。
后方交会原理的核心在于角度的测量和三角函数的运用。
测量
角度时需要使用精密的测量仪器,确保测量结果的准确性。
而在计
算坐标时,需要熟练掌握三角函数的运用方法,以及对已知点坐标
的精确掌握。
在实际的工程测量中,后方交会原理被广泛应用于地形测量、
建筑测量、道路测量等领域。
通过后方交会原理,测量员可以快速、准确地确定各个点的坐标,为工程设计和施工提供了可靠的数据支持。
需要注意的是,在进行后方交会时,测量员需要严格按照测量规程进行操作,确保测量的准确性和可靠性。
同时,对于测量仪器的使用和维护也需要进行规范的管理,以保证测量数据的可信度。
总的来说,后方交会原理是一种重要的测量方法,它通过测量角度和运用三角函数,能够准确地确定点的坐标,为工程测量提供了重要的技术支持。
在实际应用中,需要严格按照规程进行操作,确保测量数据的准确性和可靠性,为工程设计和施工提供可靠的数据支持。
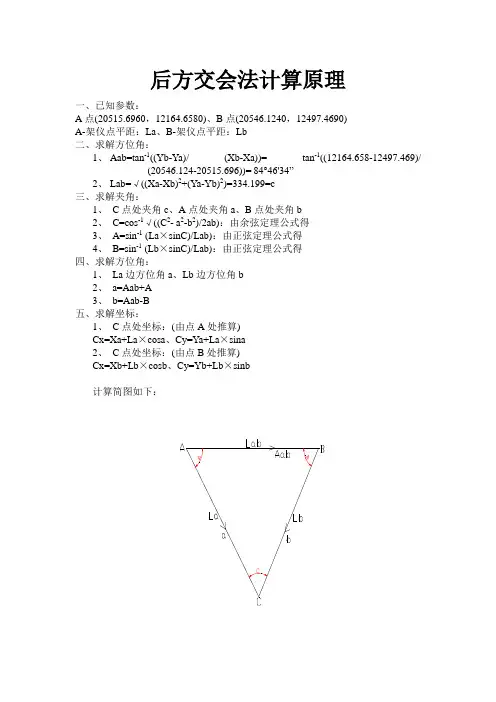
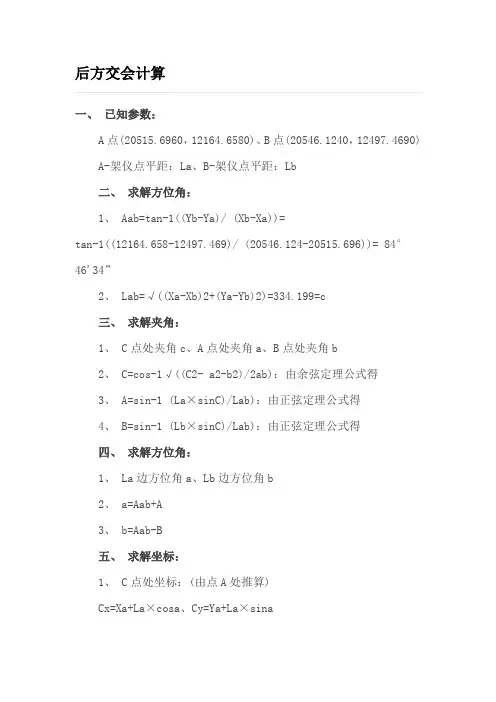
后方交会法计算原理一、已知参数:A点(20515.6960,12164.6580)、B点(20546.1240,12497.4690)A-架仪点平距:La、B-架仪点平距:Lb二、求解方位角:1、Aab=tan-1((Yb-Ya)/ (Xb-Xa))= tan-1((12164.658-12497.469)/(20546.124-20515.696))=84°46'34”2、Lab=√((Xa-Xb)2+(Ya-Yb)2)=334.199=c三、求解夹角:1、C点处夹角c、A点处夹角a、B点处夹角b2、C=cos-1√((C2- a2-b2)/2ab):由余弦定理公式得3、A=sin-1 (La×sinC)/Lab):由正弦定理公式得4、B=sin-1 (Lb×sinC)/Lab):由正弦定理公式得四、求解方位角:1、La边方位角a、Lb边方位角b2、a=Aab+A3、b=Aab-B五、求解坐标:1、C点处坐标:(由点A处推算)Cx=Xa+La×cosa、Cy=Ya+La×sina2、C点处坐标:(由点B处推算)Cx=Xb+Lb×cosb、Cy=Yb+Lb×sinb计算简图如下:斜交放样方法:一、已知参数1、A点桩号:A2、斜距离:S3、斜交角:a二、求解路线右幅:Δx=S×sina、Δy=S×cosa 右幅桩号=A+Δy、边距=Δx 三、求解路线左幅:Δx=S×sina、Δy=S×cosa 右幅桩号=A-Δy、边距=Δx计算简图:。
全站仪后方交会法步骤和高程测量步骤全站仪是一种常用于测量地面高程和水平角度的仪器。
在工程测量中,经常会使用全站仪后方交会法进行高程测量。
下面将详细介绍全站仪后方交会法的步骤和高程测量的步骤。
1.设置仪器:首先,需要选择一个适合的测量点作为基准点,并将全站仪放置在基准点上。
将全站仪水平放置,并通过调整三个螺丝调整水平仪气泡位于中心位置。
然后,使用全站仪的目标板对准基准点。
2.测量目标点:使用全站仪的望远镜和交会杆,在目标点上设置目标板。
目标板上的标识点应与全站仪的十字线对齐。
准确平稳地在目标点上设置目标板。
3.观测目标点:通过调整全站仪的望远镜,使其对准目标板上的标识点。
在读数之前,要确保全站仪已经稳定下来。
然后,记录望远镜的水平角和垂直角的读数。
4.移动到下一个目标点:移动全站仪到下一个目标点,并重复步骤2和步骤3、在每次观测之间,全站仪应保持在基准点上,并使用目标板进行校准。
5.数据处理:利用观测到的水平角和垂直角的读数,可以计算出各个目标点之间的坐标和高程差。
这种计算可以使用后方交会法进行,根据目标点在水平方向和垂直方向上的角度差,以及目标点之间的距离差,推导出目标点的空间坐标。
高程测量步骤如下:1.设置起始点:选择一个起始点作为基准点。
全站仪被放置在基准点上,并确保仪器水平放置。
2.目标点设置:将目标板设置在需要测量高程的点上。
目标板上的标识点应与全站仪的十字线对齐。
3.观测目标点:调整全站仪的望远镜,使其对准目标板上的标识点。
在记录读数之前,要确保全站仪稳定下来。
然后,记录望远镜的垂直角的读数。
4.移动到下一个目标点:移动全站仪到下一个需要测量高程的点,并重复步骤2和步骤35.高程差计算:根据每个目标点的垂直角的读数,可以计算出不同目标点之间的高程差。
通过将起始点的高程与每个目标点的高程差相加,可以得到每个目标点的实际高程。
6.数据处理:将所有测量得到的目标点的实际高程整理并记录。
进行必要的校正和调整,以获得更准确的高程数据。
后方交会原理后方交会是指在地面测量中,利用已知控制点的坐标和方位角,通过测量目标点至各个控制点的方位角和水平距离,求解目标点的坐标的过程。
后方交会原理是地面测量中的基本原理之一,它在工程测量、地形测量、地籍测量等领域都有着广泛的应用。
后方交会原理的基本思想是通过多边形闭合条件来求解目标点的坐标。
在进行后方交会时,首先需要选择至少三个已知控制点,并测量目标点至各个控制点的方位角和水平距离。
然后利用这些观测数据,通过计算方法来求解目标点的坐标。
在实际操作中,通常会选择更多的控制点,以提高后方交会的精度和可靠性。
后方交会原理的关键在于建立观测方程和计算方程。
观测方程是指利用观测数据建立的方程,通常包括方位角观测方程和距离观测方程。
方位角观测方程是根据目标点至各个控制点的方位角观测值和控制点的坐标,建立的方位角观测方程;距离观测方程是根据目标点至各个控制点的水平距离观测值和控制点的坐标,建立的距离观测方程。
计算方程是观测方程的代数形式,通过计算方程可以求解目标点的坐标。
在实际操作中,后方交会需要考虑的因素很多,如观测误差的影响、控制点的选择、计算方法的选取等。
观测误差是后方交会中需要特别重视的问题,它包括仪器误差、环境误差、人为误差等。
为了减小观测误差的影响,需要在观测过程中采取一系列的措施,如精心选择观测时机、提高观测精度、加强数据处理等。
控制点的选择也是后方交会中需要注意的问题,控制点的选择应该考虑到目标点与控制点之间的相对位置关系、控制点的分布均匀性等因素。
计算方法的选取也会影响后方交会的精度和效率,通常可以采用最小二乘法、坐标平差法等方法进行计算。
总的来说,后方交会原理是地面测量中的重要原理,它通过测量目标点至已知控制点的方位角和水平距离,求解目标点的坐标。
在实际操作中,需要注意观测误差的影响、控制点的选择、计算方法的选取等因素,以提高后方交会的精度和可靠性。
后方交会原理的理解和掌握对于地面测量工作者来说是非常重要的,它对于工程测量、地形测量、地籍测量等领域都有着重要的意义。
1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB ,则:1)当精度要求不高时:瞄准 A 点——置零( 0 SET )——瞄准 B 点,记下水平度盘 HR 的大小。
2)当精度要求高时: —— 可用测回法(method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”( H SET )。
2、距离测量( distance measurement )PSM 、PPM 的设置 —— 测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般: PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数( PPM )(乘常数)的设置。
输入测量时的气温( TEMP )、气压( PRESS ),或经计算后,输入 PPM 的值。
(1)功能:可测量平距 HD 、高差 VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”( MEAS )。
3、坐标测量( coordinate measurement )(1)功能:可测量目标点的三维坐标( X , Y, H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站 S 高程,测得:仪器高 i ,棱镜高 v ,平距,竖直角,则有:高程:(3)方法:输入测站 S ( X , Y ,H ),仪器高 i ,棱镜高 v ——瞄准后视点 B ,将水平度盘读数设置为 ——瞄准目标棱镜点 T ,按“测量”,即可显示点 T 的三维坐标。
前方交会法:在己知的两个(或两个以上)己知点(A,B)上架站通过测量α角和β角,计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(A,B):后方交会法:在待测点(P)上架站,通过使用三个己知点(A,B,C)及α角和β角计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(P):一、引言在工程测量中,内业资料计算占有很重要的比重,内业资料计算的准确无误与速度直接决定了测量工作是否能够快速、顺利地完成。
而内业资料的计算方法及其所需达到的精度,则又直接取决于外业所用仪器及具体的放样目标和内业计算所用到的办公软件和计算方法。
计算机辅助设计(Computer Aid Design 简写CAD,常称AutoCAD)是20世纪80年代初发展起来的一门新兴技术型应用软件。
如今在各个领域均得到了普遍的应用。
它大大提高了工程技术人员的工作效率。
AutoCAD配合AutoLisp语言,还可以编制一些常用的计算程序,得到计算结果。
AutoCAD的特性提供了测量内业资料计算的另外一种全新直观明了的图形计算方法。
结合我们现正使用的徕卡全站仪的情况,其可以很方便地进行三维坐标的测量,通过AutoCAD的内业计算,①、在放样的过程中,可以用编程计算器结合全站仪,非常方便地、快速地进行作业;②、运用AutoCAD进行计算结果的验证;③、随着全站仪的推广和普及,极坐标的放样越来越成为众多放样方法中备受测量人员青睐的一种,而坐标计算又是极坐标放样中的重点和难点,由于一般的红线放样,工程放样中的元素多为点、直线(段)、圆(弧)等,故可以充分利用AutoCAD的设定坐标系、绘图和取点的功能,以及结合我们外业所用计算器的功能,从而大大减轻我们外业的工作强度及内业的工作量。
以下以冶勒电站厂区枢纽工程的一些实例来说明三者在工程测量中的应用。
二、测区概况冶勒电站厂址位于石棉县李子坪乡南桠村,距坝址11KM,距石棉县城40KM。
距离后方交会计算(CASIO fx-5800P计算器)程序
距离后方交会计算(CASIO fx-5800P计算器)程序
一、程序功能
本程序适用于在一个未知点上设测站,观测两到个已知点的距离后,解算该未知坐标。
注意:这种观测两到个已知点的距离后解算该未知坐标的方法,缺少多余观测值,也就缺少检核条件。
二、程序清单
Lbl 1:"XA"?A: "YA"?B: "XB"?C: "YB"?D:"D1"?E: "D2"?F: "Q"?Q
Pol(C-A, D-B)→G
J+QCos-1((GG+EE-FF)÷2÷G÷E)→H
A+ECosH→X
B+ESinH→Y
"XP=":X◢
"YP=":Y◢
Goto 1←┘
三、使用说明
1、规定
(1) 未知点为P点,已知点分别为A点、B点;
(2) P点至A点的距离为D1,P点至B点的距离为D2;
(3) 当A、B、P三点逆时针排列时,Q=-1;当A、B、P三点顺时针排列时,Q=1。
2、输入与显示说明
输入部分:
XA ? 输入A点的X坐标
YA ?输入A点的Y坐标
XB ? 输入B点的X坐标
YB ?输入B点的Y坐标
D1 ?输入P点至A点的距离为D1
D2 ?输入P点至B点的距离为D2
Q ?输入A、B、P三点排列方式(逆时针时,Q=-1;顺时针时,Q=1)显示部分:
XP=×××所求点P的X坐标
YP=×××所求点P的Y坐标
四、算例
已知XA=539.3551,YB=602.9159,XB=433.0034,YB=1087.4213,D1=380.7996,D2=245.8664,A、B、P三点排列方式为逆时针(Q=-1),求P点的坐标。
输入数据后,经计算得
XP=647.8773101
YP=967.9244825。