距离后方交会计算
- 格式:doc
- 大小:25.50 KB
- 文档页数:2
“待测点高度仪器读数0.5m”不知是不是指待测点与设站点之间的高差。
假设设站点A,待测点B,则HA+h=HB+i(棱镜高)-d高差即实际高度是:HA+h-i+d高差=1.43+0.5-1.2=0.73M其中HA+h是指视线高,即你所说的仪器高度1.43m。
不过我还是对你的描述有些不解!A是全站仪的点B是棱镜的点HB=HA+1.43+所测斜距*COS天顶距-1.2 如果你正常设站测坐标的话直接测出来的读书就是B点高程输入建站点的坐标和高程,测量出建站点到全站仪的垂直高度,输入到仪器高里面,再输入棱镜高。
后视完,就可以测量了,一般全站仪上有个三角型按钮代表测量距离(平距HD,斜距SD)和高程(高程Z高差VD)。
根据楼层高程和测量的高程差,就可以算出实际差了。
方法一:架设C为已知高程点Hc,B为未知高程点,高程记为Hb将全站仪架设在C点精确对中整平,用钢卷尺量取仪器高度记为i,在B点架设棱镜精确对中整平,量取棱镜高度记为v,用全站仪望远镜精确照准棱镜中心,按下测距按键,得出AB水平距离D,读出竖盘读数A,则可得到B点高程:Hb=Hc+DTanA+i-v方法二:采用全站仪三维坐标测量程序功能将全站仪架设在已知高程点C,将棱镜架设在另一已知高程点B在全站仪的功能里面找到:三维坐标测量或者是直角坐标测量然后进入1.建站,按照仪器提示,输入仪器架设的点C的所有已知数据(如果仅已知高程,那就把其他需要输入的项全部架设,仪器高必须用卷尺量取,并真实输入)2.定向,将全站仪望远镜瞄准另一已知高程点B,输入B点所有已知数据后,按确认键完成。
(如果仅已知高程,那就把其他需要输入的项全部架设,棱镜高必须用卷尺量取,并真实输入)3.照准其他任何你想要测量高程的点按测量键,仪器就会显示该待测点的坐标和高程(如果前面建站和定向都用的假设坐标,此处得到的坐标当然也是假定的,但是高程是完全正确的)先输入测站点的高程,再量取仪器高,并输入全站仪中,最后再输入待测点处棱镜杆的高度,然后用全站仪瞄准棱镜中心,点击测量即可。
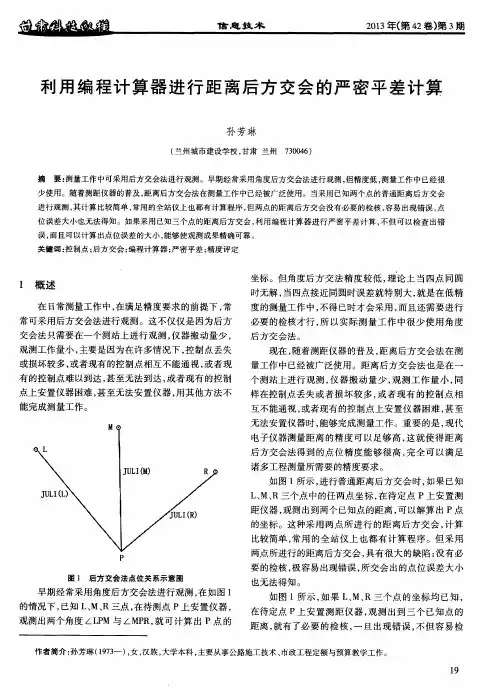
大数据时代测边后方交汇的计算公式及精度分析摘要在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
基于此,本文就针对测边后方交汇的计算公式及精度进行分析研究。
关键词测边后方交汇;计算公式;精度分析前言由于测边后方交会定点具有布点灵活、施测方便、无须已知点之间互相通视且计算简便等优点,尤其在全站仪已普及应用的情况下,优点更为明显。
随着电子技术和计算机技术的发展,全站仪的测角和测距性能得到了很大程度的提高。
很多全站仪的测量、记录、数据预处理、显示等多种模块都向着智能化、集成化的方向发展,这样就大大减少了测设过程中的误差来源,提高了测量数据的精度。
1 测边后方交会定点的计算公式在实际的生产过程中,常常因工期紧,任务重,各项工作交叉进展,导致原有的测量控制点遭到不同程度的破坏,给施工测量工作带来了很大的困难。
例如两控制点不通视,在设备安装时某些部件上的控制点上只能放棱镜而不适宜架设仪器等情况。
以往为了解决工程测量中出现的这些问题,常用极坐标法、直角坐标法、无定向导线法等测设方法来确定加密点,这些方法不但工作量大,而且加密点往往达不到原有控制点的精度[1]。
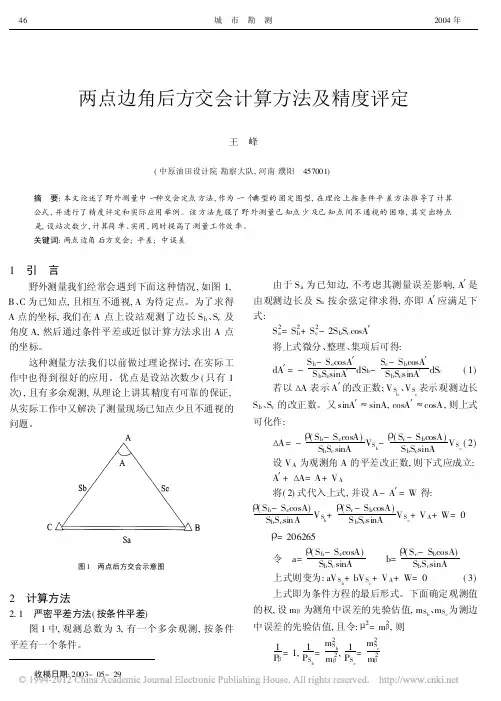
而传统的后方交会方法是通过在加密点上观测3个已知方向的水平夹角来计算测站的平面坐标,它要求加密点不能位于由3个已知点构成的危险圆附近。
由于这些条件在城市工程测量中较难满足而限制了传统后方交会方法的使用。
为此,本文提出了测边后方交会方法。
它是通过在加密点P上安置全站仪,在已知点A、B上安置反射镜,通过测量水平距离P A、PB和水平角V,计算测站点的平面坐标。
与传统后方交会方法比较,测边后方交会只需要在加密点上观测附近任意两个已知点的水平距离和水平角就可以计算出测站点的坐标。
距离后方交会计算(CASIO fx-5800P计算器)程序距离后方交会计算(CASIO fx-5800P计算器)程序一、程序功能本程序适用于在一个未知点上设测站,观测两到个已知点的距离后,解算该未知坐标。
注意:这种观测两到个已知点的距离后解算该未知坐标的方法,缺少多余观测值,也就缺少检核条件。
二、程序清单Lbl 1:"XA"?A: "YA"?B: "XB"?C: "YB"?D:"D1"?E: "D2"?F: "Q"?QPol(C-A, D-B)→GJ+QCos-1((GG+EE-FF)÷2÷G÷E)→HA+ECosH→XB+ESinH→Y"XP=":X◢"YP=":Y◢Goto 1←┘三、使用说明1、规定(1) 未知点为P点,已知点分别为A点、B点;(2) P点至A点的距离为D1,P点至B点的距离为D2;(3) 当A、B、P三点逆时针排列时,Q=-1;当A、B、P三点顺时针排列时,Q=1。
2、输入与显示说明输入部分:XA ? 输入A点的X坐标YA ?输入A点的Y坐标XB ? 输入B点的X坐标YB ?输入B点的Y坐标D1 ?输入P点至A点的距离为D1D2 ?输入P点至B点的距离为D2Q ?输入A、B、P三点排列方式(逆时针时,Q=-1;顺时针时,Q=1)显示部分:XP=×××所求点P的X坐标YP=×××所求点P的Y坐标四、算例已知XA=539.3551,YB=602.9159,XB=433.0034,YB=1087.4213,D1=380.7996,D2=245.8664,A、B、P三点排列方式为逆时针(Q=-1),求P点的坐标。
输入数据后,经计算得XP=647.8773101YP=967.9244825。
后方交会法计算推导公式后方交会法是一种用于计算物体在空间中的坐标和距离的方法。
它基于两个观测者在不同位置观测同一个物体的现象。
假设有两个观测者A和B,在空间中观测同一个物体P。
观测者A 和B的位置分别为A(xA, yA, zA)和B(xB, yB, zB)。
物体P在观测者A和B的朝向上的投影分别为a和b,它们的长度分别为dA和dB。
根据几何关系,可以推导出以下公式:dA = sqrt((xA - xP)^2 + (yA - yP)^2 + (zA - zP)^2)dB = sqrt((xB - xP)^2 + (yB - yP)^2 + (zB - zP)^2)其中,(xP, yP, zP)是物体P的坐标。
如果已知dA、dB和相关观测者位置的坐标,可以使用这些公式来计算物体P的坐标(xP, yP, zP)。
同时,如果已知物体P在两个观测者朝向上的投影长度a和b,也可以利用这些公式计算物体P到观测者A和B的距离。
需要注意的是,后方交会法在实际应用中可能会受到观测误差的影响,因此在计算时需要考虑这些误差,并采取合适的数据处理和精度控制方法。
拓展:后方交会法是测量和定位的重要方法之一,广泛应用于地理测量、摄影测量、建筑工程等领域。
它可以通过精确的测量和计算,确定物体在三维空间中的准确位置和形状,对于工程设计、地理信息系统等具有重要的实际应用价值。
除了后方交会法,还有其他一些方法可以用于测量和定位物体的坐标和距离,比如三角测量法、三角高程测量法、全站仪测量法等。
每种方法都有其适用的场景和局限性,根据具体的测量需求和条件选择合适的方法是非常重要的。
此外,随着科技的进步和发展,新的测量和定位技术不断涌现,为实现更精确和高效的测量和定位提供了更多的选择。
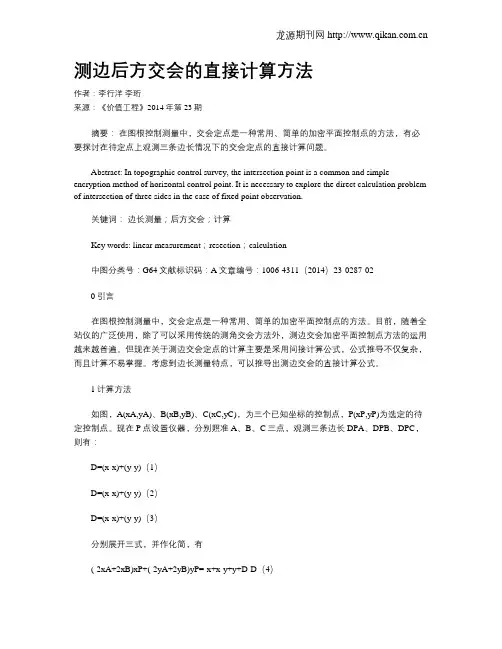
测边后方交会的直接计算方法作者:李行洋李珩来源:《价值工程》2014年第23期摘要:在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法,有必要探讨在待定点上观测三条边长情况下的交会定点的直接计算问题。
Abstract: In topographic control survey, the intersection point is a common and simple encryption method of horizontal control point. It is necessary to explore the direct calculation problem of intersection of three sides in the case of fixed point observation.关键词:边长测量;后方交会;计算Key words: linear measurement;resection;calculation中图分类号:G64文献标识码:A文章编号:1006-4311(2014)23-0287-020引言在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
考虑到边长测量特点,可以推导出测边交会的直接计算公式。
1计算方法如图,A(xA,yA)、B(xB,yB)、C(xC,yC),为三个已知坐标的控制点,P(xP,yP)为选定的待定控制点。
现在P点设置仪器,分别照准A、B、C三点,观测三条边长DPA、DPB、DPC,则有:D=(x-x)+(y-y)(1)D=(x-x)+(y-y)(2)D=(x-x)+(y-y)(3)分别展开三式,并作化简,有(-2xA+2xB)xP+(-2yA+2yB)yP=-x+x-y+y+D-D(4)(-2xA+2xC)xP+(-2yA+2yC)yP=-x+x-y+y+D-D(5)(-2xB+2xC)xP+(-2yB+2yC)yP=-x+x-y+y+D-D(6)显然,由上述三式中的任意两式均可求出P(xP,yP)。
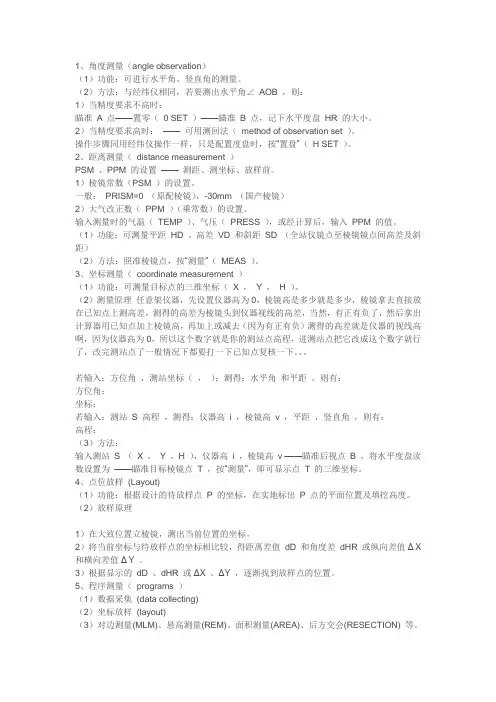
1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB ,则:1)当精度要求不高时:瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。
2)当精度要求高时:——可用测回法(method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。
2、距离测量(distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般:PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数(PPM )(乘常数)的设置。
输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。
(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS )。
3、坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
后方交会在施工测量中的应用与分析(图文)后方交会法是测量学中广泛应用的一种几何测量方法,它可以用于对已知控制点的坐标及其相对位置关系进行测量,以推算待测对象的坐标。
在施工测量中,后方交会法常用于测量建筑物、道路、桥梁、隧道等工程结构的坐标,以保证这些结构的建造精度和安全性。
本文将介绍后方交会法在施工测量中的应用及其分析。
什么是后方交会法后方交会法是测量学中一种基本的几何测量方法,它利用已知控制点的坐标及其相对位置关系,通过测量目标物体上特定点的定向角、仰角和水平距离,从而推算出目标点的空间坐标。
后方交会法的基本步骤包括:观测控制点,计算控制点坐标,测量特定目标点的定向角、仰角和水平距离,推算目标点坐标,最后通过重算检查误差,保证准确性。
后方交会法的主要优点在于:适用范围广,可用于较大的空间距离,操作简便,精度高。
后方交会法在施工测量中的应用后方交会法在施工测量中的应用范围广泛,通常用于以下情况:1.建筑结构的定位和测量。
后方交会法可以用于建筑物立面的测量,如门、窗、墙角等标志性结构的位置和高度测量。
此外,后方交会法可用于逐层扫描建筑物自上而下的高程数据收集,以获取建筑物的立体信息。
2.道路、桥梁、隧道等工程结构的坐标测量。
后方交会法可用于收集地球表面上的架桥点坐标,以及地面各点之间的相对位置关系;同时,也可用于隧道和地下建筑物的GPS定位和导向。
3.土地测量。
后方交会法可用于土地界址的位置识别和土地面积的测量。
后方交会法在施工测量中的分析后方交会法在施工测量中的具体应用需要进行相应的分析,主要包括三个方面:观测条件的分析后方交会法在施工测量中需要满足一定的观测条件,观测条件的不同会对测量结果带来不同的影响。
例如,观测点数量的不足、观测角度的不合理等因素都会降低测量结果的精度。
因此,在施工测量前需要进行观测条件的充分分析,并选择合适的设备和方案。
推算过程的优化后方交会法在施工测量中的推算过程需要进行优化,以提高测量精度。
1、角度测量angleobservation1功能:可进行水平角、竖直角的测量;2方法:与经纬仪相同,若要测出水平角∠AOB,则:1当精度要求不高时:瞄准A点——置零0SET——瞄准B点,记下水平度盘HR的大小;2当精度要求高时:——可用测回法methodofobservationset;操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”HSET;2、距离测量distancemeasurementPSM、PPM的设置——测距、测坐标、放样前;1棱镜常数PSM的设置;一般:PRISM=0原配棱镜,-30mm国产棱镜2大气改正数PPM乘常数的设置;输入测量时的气温TEMP、气压PRESS,或经计算后,输入PPM的值;1功能:可测量平距HD、高差VD和斜距SD全站仪镜点至棱镜镜点间高差及斜距2方法:照准棱镜点,按“测量”MEAS;3、坐标测量coordinatemeasurement1功能:可测量目标点的三维坐标X,Y,H;2测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去因为有正有负测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下;;;若输入:方位角,测站坐标,;测得:水平角和平距;则有:方位角:坐标:若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:3方法:输入测站SX,Y,H,仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标;4、点位放样Layout1功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度; 2放样原理1在大致位置立棱镜,测出当前位置的坐标;2将当前坐标与待放样点的坐标相比较,得距离差值dD和角度差dHR或纵向差值ΔX 和横向差值ΔY;3根据显示的dD、dHR或ΔX、ΔY,逐渐找到放样点的位置;5、程序测量programs1数据采集datacollecting2坐标放样layout3对边测量MLM、悬高测量REM、面积测量AREA、后方交会RESECTION等;4数据存储管理;包括数据的传输、数据文件的操作改名、删除、查阅;§7.2TOPCONGTS-312全站仪使用简介一、仪器面板外观和功能说明面板上按键功能如下:——进入坐标测量模式键;◢——进入距离测量模式键;ANG——进入角度测量模式键;MENU——进入主菜单测量模式键;ESC——用于中断正在进行的操作,退回到上一级菜单;POWER——电源开关键◢◣——光标左右移动键▲▼——光标上下移动、翻屏键F1、F2、F3、F4——软功能键,其功能分别对应显示屏上相应位置显示的命令;显示屏上显示符号的含义:V——竖盘读数;HR——水平读盘读数右向计数;HL——水平读盘读数左向计数;HD——水平距离;VD——仪器望远镜至棱镜间高差;SD——斜距;——正在测距;N——北坐标,x;E——东坐标,y;Z——天顶方向坐标,高程H;二、全站仪几种测量模式介绍1、角度测量模式功能:按ANG进入,可进行水平角、竖直角测量,倾斜改正开关设置;第1页F1 OSET:设置水平读数为:0°00ˊ00";F2 HOLD:锁定水平读数;F3 HSET:设置任意大小的水平读数;F4 P1↓:进入第2页;第2页F1 TILT:设置倾斜改正开关;F2 REP:复测法;F3 V%:竖直角用百分数显示;F4 P2↓:进入第3页;第3页F1 H-BZ:仪器每转动水平角90°时,是否要蜂鸣声;F2 R/L:右向水平读数HR/左向水平读数HL切换,一般用HR; F3 CMPS:天顶距V/竖直角CMPS的切换,一般取V;F4 P3↓:进入第1页;2、距离测量模式功能:按◢进入,可进行水平角、竖直角、斜距、平距、高差测量及PSM、PPM、距离单位等设置;第1页F1 MEAS:进行测量;F2 MODE:设置测量模式,Fine/coarse/tragcking精测/粗测/跟踪;F3 S/A:设置棱镜常数改正值PSM、大气改正值PPM;F4 P1↓:进入第2页;第2页F1 OFSET:偏心测量方式;F2 SO:距离放样测量方式;F3 m/f/i:距离单位米/英尺/英寸的切换;F4 P2↓:进入第1页;3、坐标测量模式功能:按进入,可进行坐标N,E,H、水平角、竖直角、斜距测量及PSM、PPM、距离单位等设置;第1页F1 MEAS:进行测量;F2 MODE:设置测量模式,Fine/Coarse/Tracking;F3 S/A:设置棱镜改正值PSM,大气改正值PPM常数;F4 P1↓:进入第2页;第2页F1 R.HT:输入棱镜高;F2 INS.HT:输入仪器高;F3 OCC:输入测站坐标;F4 P2↓:进入第3页;第3页F1 OFSET:偏心测量方式;F2 ———F3 m/f/i:距离单位米/英尺/英寸切换;F4 P3↓:进入第1页;4、主菜单模式功能:按MENU进入,可进行数据采集、坐标放样、程序执行、内存管理数据文件编辑、传输及查询、参数设置等;三、全站仪功能简介测量前,要进行如下设置——按◢或,进入距离测量或坐标测量模式,再按第1页的S/AF3;1、棱镜常数PRISM的设置——进口棱镜多为0,国产棱镜多为-30mm;具体见说明书2、大气改正值PPM的设置——按“T-P”,分别在“TEMP.”和“PRES.”栏,输入测量时的气温、气压;或者按照说明书中的公式计算出PPM值后,按“PPM”直接输入; 说明:PRISM、PPM设置后,在没有新设置前,仪器将保存现有设置;一角度测量按ANG键,进入测角模式开机后默认的模式,其水平角、竖直角的测量方法与经纬仪操作方法基本相同;照准目标后,记录下仪器显示的水平度盘读数HR和竖直度盘读数V;二距离测量先按◢键,进入测距模式,瞄准棱镜后,按F1MEAS,记录下仪器测站点至棱镜点间的平距HD、镜头与镜头间的斜距SD和镜头与镜头间的高差VD;三坐标测量1、按ANG键,进入测角模式,瞄准后视点A;2、按HSET,输入测站O至后视点A的坐标方位角;如:输入65.4839,即输入了;3、按键,进入坐标测量模式;按P↓,进入第2页;4、按OCC,分别在N、E、Z输入测站坐标X0,Y0,H0;5、按P↓,进入第2页,在INS.HT栏,输入仪器高;6、按P↓,进入第2页,在R.HT栏,输入B点处的棱镜高;7、瞄准待测量点B,按MEAS,得B点的XB,YB,HB;四零星点的坐标放样不使用文件1、按MENU,进入主菜单测量模式;2、按LAYOUT,进入放样程序,再按SKP,略过使用文件;3、按OOC.PTF1,再按NEZ,输入测站O点的坐标X0,Y0,H0;并在INS.HT一栏,输入仪器高;4、按BACKSIGHTF2,再按NE/AZ,输入后视点A的坐标xA,yA;若不知A点坐标而已知坐标方位角,则可再按AZ,在HR项输入的值;瞄准A点,按YES;5、按LAYOUTF3,再按NEZ,输入待放样点B的坐标xB,yB,HB及测杆单棱镜的镜高后,按ANGLEF1;使用水平制动和水平微动螺旋,使显示的dHR=0°00ˊ00",即找到了OB 方向,指挥持测杆单棱镜者移动位置,使棱镜位于OB方向上;6、按DIST,进行测量,根据显示的dHD来指挥持棱镜者沿OB方向移动,若dHD为正,则向O点方向移动;反之若dHD为负,则向远处移动,直至dHD=0时,立棱镜点即为B 点的平面位置;7、其所显示的dZ值即为立棱镜点处的填挖高度,正为挖,负为填;8、按NEXT——反复5、6两步,放样下一个点C;后方交会法通常用在高精度测量设站中,因其具备足够检核条件而被广泛应用;这种方法对仪器本身精度要求、稳定性非常高;。
后方交会法计算步骤
后方交会法是一种用来计算地图上两个已知点之间的距离和方位角的方法。
以下是后方交会法的计算步骤:
1. 获取已知点的坐标:首先需要测量或获取两个已知点的地理坐标(经纬度或平面坐标)。
2. 根据已知点坐标计算坐标增量:使用已知点的坐标和观测量来计算各观测线(与已知点相连的直线)的坐标增量。
坐标增量是指从已知点到点的差值。
3. 根据坐标增量计算未知点坐标:根据各观测线的坐标增量,可以计算出未知点的坐标。
这可以通过简单的几何计算或通过矩阵运算来实现。
4. 计算未知点到已知点的距离:使用已知点和计算出的未知点的坐标,可以计算未知点到已知点的距离。
这通常使用欧几里得距离公式进行计算。
5. 计算未知点与正北方向之间的方位角:使用已知点和计算出的未知点的坐标,可以计算未知点与正北方向之间的方位角。
这可以通过三角函数计算或使用方位角公式来实现。
通过以上步骤,可以使用后方交会法计算出地图上两个已知点之间的距离和方位角。
请注意,在实际应用中,还需要考虑误差和其他因素,并进行适当的精度控制和数据处理。
距离后方交会计算(CASIO fx-4800P计算器)程序
距离后方交会计算(CASIO fx-4800P计算器)程序
一、程序功能
本程序适用于在一个未知点上设测站,观测两到个已知点的距离后,解算该未知坐标。
本程序也可以在CASIO fx-4500P计算器及CASIO fx-4850P计算器上运行。
二、源程序
Lbl 1:{ABCDEFQ}:A"XA":B” YA”:C"XB":D"YB":E"D1":F"D2":Q:J=0:G=Pol(C-A, D-B) :H=J+QCos-1((GG+EE-FF)÷2÷G÷E):X"XP"=A+ECosH◢Y"YP"=B+ESinH◢
Goto 1←┘
注:CASIO fx-4850改如下
Lbl 1:{ABCDEFQ}:A"XA":B” YA”:C"XB":D"YB":E"D1":F"D2":Q:J=0:G=Pol(C-A, D-B) :H=J+QCos-1((GG+EE-FF)÷2÷G÷E):"XP":X=A+ECosH◢"YP":Y=B+ESinH◢
Goto 1←┘
三、使用说明
1、规定
(1) 未知点为P点,已知点分别为A点、B点;
(2) P点至A点的距离为D1,P点至B点的距离为D2;
(3) 当A、B、P三点逆时针排列时,Q=-1;当A、B、P三点顺时针排列时,Q=1。
2、输入与显示说明
输入部分:
XA ? 输入A点的X坐标
YA ?输入A点的Y坐标
XB ? 输入B点的X坐标
YB ?输入B点的Y坐标
D1 ?输入P点至A点的距离为D1
D2 ?输入P点至B点的距离为D2
Q ?输入A、B、P三点排列方式(逆时针时,Q=-1;顺时针时,Q=1)显示部分:
XP=×××所求点P的X坐标
YP=×××所求点P的Y坐标
四、算例
已知XA=539.3551,YB=602.9159,Xb=433.0034,YB=1087.4213,
D1=380.7996,D2=245.8664,A、B、P三点排列方式为逆时针(Q=-1),求P点的坐标。
输入数据后,经计算得
XP=647.8773101
YP=967.9244825。