变速积分PID控制系统设计
- 格式:doc
- 大小:1.60 MB
- 文档页数:37
数字PID控制系统设计方案如下:一、引言PID控制器是一种常用的闭环控制算法,用于调节系统的输出以使系统稳定在设定值附近。
数字PID控制系统通过数字信号处理器(DSP)或单片机实现PID控制算法,具有灵活性高、易实现和调试等优点。
本文将介绍数字PID控制系统的设计方案,包括硬件连接、软件算法设计和系统调试等内容。
二、硬件设计1. 控制对象:确定待控制的物理对象或过程,例如电机转速、温度、液位等。
2. 传感器:选择合适的传感器获取待控量的反馈信号,如编码器、温度传感器、压力传感器等。
3. 执行器:选择合适的执行器,如电机、阀门等,用于调节系统输出。
4. 控制器:采用DSP或单片机作为数字PID控制器,负责计算PID 控制算法输出并控制执行器。
三、软件算法设计1. PID算法:根据系统特性和需求设计PID控制算法,包括比例项、积分项和微分项的权重和计算方法。
2. 离散化:将连续时间的PID算法离散化,适应数字控制器的运算方式。
3. 反馈控制:读取传感器反馈信号,计算PID输出,并控制执行器实现闭环控制。
四、系统调试1. 参数整定:通过实验和调试确定PID控制器中的比例系数、积分时间和微分时间等参数。
2. 稳定性测试:观察系统响应和稳定性,调整PID参数以提高系统性能。
3. 实时监测:实时监测系统输入、输出和误差信号,确保PID控制器正常工作。
五、性能优化1. 自适应控制:根据系统动态特性调整PID参数,实现自适应控制。
2. 鲁棒性设计:考虑系统模型不确定性和外部扰动,设计鲁棒性PID 控制算法。
3. 高级控制:结合模糊控制、神经网络等高级控制方法,优化系统性能。
六、总结数字PID控制系统设计是一项重要的控制工程任务,通过合理的硬件设计和软件算法实现,可以实现对各种控制对象的精确控制。
希望通过本文的介绍,读者能够了解数字PID控制系统的设计原理和实现方法,并在实践中不断提升控制系统设计和调试的能力。
柴油发电机组数字调速系统研制过程中发现,采用普通PID运算,振荡及超调时有发生,为了改善调速系统性能,采用了变速积分PID及模糊PID。
变速积分PID用来调节积分系数,模糊PID用来调节比例系数。
1 变速积分PID原理1.1 PID控制原理[1,2]常规PID控制系统原理框图如图1所示。
PID控制器是一种线性控制器,它根据给定值r(t)与实际输出构成控制偏差:将此偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制。
其控制规律为:式中,Kp为比例系数,T1为积分时间常数,TD为微分时间常数。
在PID控制中,比例项用于纠正偏差,积分项用于消除系统的稳态误差,微分项用于减小系统的超调量,增加系统稳定性。
PID控制器的性能就决定于Kp、T1和TD这3个系数。
如何选用这3个系数是PID控制的核心。
1.2 数字PID控制算法选择设计和调整数字PID控制器的任务就是根据被控对象和系统要求,选择合适的PID模型,将其进行离散化处理,编出计算机程序由微处理器实现,最后确定KP、T1、TD、和T,T为采样周期。
微处理器控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量,因此,必须对PID模型进行离散化处理。
用矩形方法数值积分代替式(3)中的积分项,对式(3)中的导数项用后向差分逼近,经推理可得到基本PID控制的位置式算法:式中k——采样序号,k=0,1,2,……U(k)——第k次采样时刻输出值E(k)——第k次采样时输入的偏差值E(k-1)——第(k-1)次采样时刻输入的偏差值K1——积分系数,K1=KpT/T1KD——微分数系,KD=KpTD/T1在数字控制系统中,PID控制规律是用程序来实现的,因而具有更大的灵活性。
由于基本PID控制中引入了积分环节,其目的主要是为了消除静差,提高精度。
但在柴油机调速过程中,突加突减负载时,会引起转速的较大波动,导致短时间内转速出现较大偏差,通过PID积分运算积累,超调量过大,系统产生振荡,严重影响发电机组输出电能的品质。
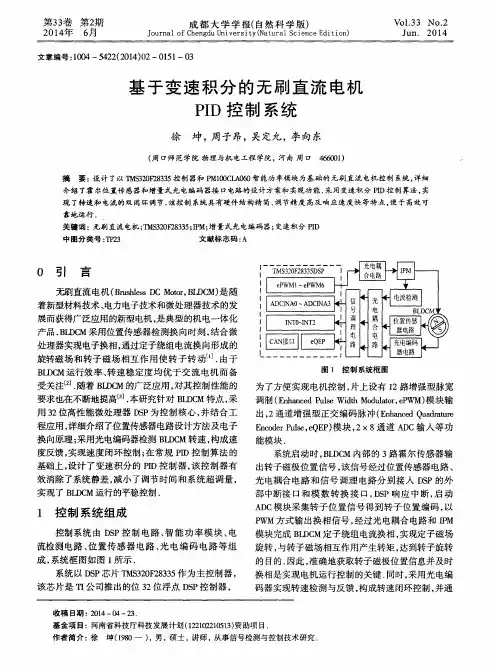
机械设计与制造148Machinery Design&Manufacture第2期2021年2月BP+RNN变速积分PID算法的汽车底盘测功机控制系统周洲,陈宇轩,程鑫(长安大学信息工程学院,陕西西安710064)摘要:高精度的PID控制算法对汽车底盘测功机运行过程中的实时控制具有重要的作用,为此提出了一种面向汽车底盘测功机的BP+RNN变速积分PID算法控制系统:引入RNN加入时序性因素整定积分项参数,利用BP神经网络整定比例项与微分项参数,使用变速积分PID算法作为其控制方法。
实验结果表明该PID控制系统不但能够快速整定PID参数(10个控制周期以内),同时还保证控制超调量在目标值的2%以内。
与传统的增量式PID算法控制相比,BP+RNN变速积分PID算法控制系统的参数整定简单快速,消除了静态误差,使汽车底盘测功机的控制性能得到大幅改善。
关键词:变速积分PID;控制系统;BP神经网络;RNN网络;汽车底盘测功机中图分类号:TH16;TP273文献标识码:A文章编号:1001-3997(2021)02-0148-05Control System of BP+RNN Variable Speed Integral PIDAlgorithm for Automobile Chassis DynamometerZHOU Zhou,CHEN Yu-xuan,CHENG Xin(School of Information Engineering,Chang'an University,Shaanxi Xi'an710064,China)Abstract:77ie PID control algorithm with high precision plays a vital role in the real-time control of automobile chassis dynamometer,so presenting a BP+RNN variable speed integral PID algorithm control system for automobile chassis dynamometer:RNN is introduced to add timing factors to set integral term parameter,a nd BP neural network is used to set proportional term and differential term parameters,and variable speed integral PID algorithm is used as its control method. Experimental results show that the PID control system can not only quickly adjust the PID parameters(^within10control cycles),but also ensure the control overshoot within2%of the target pared with the traditional incremental PID algorithm control,the parameters setting of BP+RNN variable speed integral PID algorithm control system is simple and f ast, the static error is eliminated,a nd the control performance of automobile chassis dynamometer is improved greatly.Key Words:Variable Speed Integral PID;Control System;BP Neural Network;RNN Network;Automobile Chassis Dynamometer1引言汽车底盘测功机是一种检测汽车动力性、输出功率和尾气排放等性能的机械设备,它通过PID控制影响飞轮惯性的转动惯量,以此对汽车驾驶时的转动惯量进行仿真,从而对汽车的运行状况进行动态检测现PID算法的系数整定是一个复杂的问题,而当其应用于汽车底盘测功机这种复杂的时变非线性、具有强惯性的大型设备时,系数的整定会更加困难叫文献咗PID算法参数整定过程中结合模糊推理机制,首先根据输入误差确定模糊论域与隶属度函数,接着采用Mamdani 算法作为模糊推理的方法,最后确定出一W合当前情况的模糊矩阵表,根据该表整定对应的PID参数。
PID控制原理及参数设定PID控制是一种常用的自动控制算法,它通过反馈控制的方式,根据控制对象的输出与期望目标的差异来调整输入信号,实现对控制对象的稳定控制。
PID控制由比例(P)、积分(I)和微分(D)三部分组成,分别对应了不同的控制机制。
P(比例)控制是指控制信号与误差的线性比例关系,P控制主要用于快速响应系统,能够快速减小误差,但不能完全消除误差。
P控制的公式为:u(t)=Kp*e(t),其中u(t)表示控制信号,Kp为比例增益,e(t)为误差。
通过调节比例增益Kp的大小,可以控制系统的响应速度。
I(积分)控制是指控制信号与误差的累积关系,I控制主要用于消除系统的稳态误差。
I控制的公式为:u(t) = Ki * ∫e(t)dt,其中Ki为积分增益。
通过调节积分增益Ki的大小,可以控制系统的稳态误差。
D(微分)控制是指控制信号与误差的变化率关系,D控制主要用于抑制系统的超调和震荡。
D控制的公式为:u(t) = Kd * de(t)/dt,其中Kd为微分增益,de(t)/dt为误差的变化率。
通过调节微分增益Kd的大小,可以控制系统的稳定性和响应速度。
根据PID控制的原理,控制信号可以表示为:u(t) = Kp * e(t) +Ki * ∫e(t)dt + Kd * de(t)/dt。
其中,e(t)为误差,t为时间。
在实际应用中,PID控制器还需要设置参数,包括比例增益Kp、积分增益Ki和微分增益Kd。
如何设置这些参数是设计一个有效的PID控制器的关键。
参数设定方法有很多种,常用的方法包括经验法、试验法和自整定法等。
经验法是一种基于经验规则的参数设定方法,它根据控制对象的特性和应用经验来选取参数。
经验法比较简单易用,但通常需要根据实际情况进行适当的调整。
试验法是通过试验分析控制对象的动态响应来选取参数,常用的试验方法有阶跃响应法、脉冲响应法和频率响应法等。
试验法的参数设定相对准确,但需要进行一定的试验工作,并且需要对试验数据进行分析。
控制系统PID调节器设计方法及参数优化PID调节器是控制系统中常用的一种控制器,用于调节系统的输出与给定的参考输入之间的误差。
PID调节器的设计方法及参数优化对于控制系统的稳定性、快速性和精确性有着重要的影响。
在本文中,我们将详细介绍PID调节器的设计方法以及参数的优化技术。
首先,我们来介绍PID调节器的设计方法。
PID调节器由比例控制器(P)、积分控制器(I)和微分控制器(D)三个部分组成。
比例控制器根据误差的大小来调节控制变量的输出;积分控制器用来消除静差,即使得系统的稳态误差为零;微分控制器用来预测误差的变化趋势,进一步改善系统的动态性能。
设计PID调节器的第一步是确定比例增益(Kp)、积分时间(Ti)和微分时间(Td)这三个参数的初始值。
通常情况下,可以先将比例增益设定为一个合适的值,然后逐步调整积分时间和微分时间。
比例增益的大小决定了系统对于误差的响应速度;积分时间的选择应该考虑系统的稳态误差;微分时间用来抑制系统的超调量。
在初始参数设定好之后,接下来就需要进行参数的优化。
常用的参数优化方法包括试错法、Ziegler-Nichols法和一些现代控制理论方法。
试错法是最直观的方法,通过反复尝试不同的参数值直到满足系统的要求。
Ziegler-Nichols法是一种经验法则,通过系统的临界增益和临界周期来确定参数。
现代控制理论方法则采用数学优化技术,通过最小化某个性能指标来确定最佳参数。
除了以上介绍的方法,还有一些参数优化的注意事项需要考虑。
首先,要注意避免参数的过调。
参数过大会导致系统不稳定,而参数过小则会导致系统响应过慢。
其次,要根据实际系统的特点来确定参数的取值范围,避免不合理的参数设定。
另外,对于非线性系统,可能需要采用自适应控制方法来实现参数的优化。
最后,还要提到一些现代控制理论中关于PID控制器的改进方法。
例如,可以采用二阶PID控制器来提高系统的动态性能和稳态精度。
还可以结合模糊控制、神经网络和遗传算法等方法来实现自适应的PID控制。
基于变速积分PID的开关磁阻电动机调速系统王歆.田雨波.王宝忠(江苏科技大学,江苏镇江212003)摘要:在分析了开关磁阻电动机闭环速度控制方案的基础上,针对PID算法在开关磁阻电动机应用中出现的问题,给出了相应的解决方法,提出了非线性变速积分PII)算法.并成功地解决了在低采样周期时PID 算法的积分饱和问题。
关键词:开关磁阻电动机;PID控制;非线性变速积分0引言低制造成本、高可靠性和高能量转换效率是机电运动控制系统的发展趋势。
开关磁阻电动机结构简单,适合在恶劣环境下运行,只在定子上有绕组,没有转子铜耗。
因此开关磁阻驱动系统迎合了机电运动控制系统的发展趋势,融合了电力电子技术和现代控制算法发展成果,成为近年机电运动控制领域的研究热点。
近年来已广泛应用于家电、汽车、数控机床、机器人等领域。
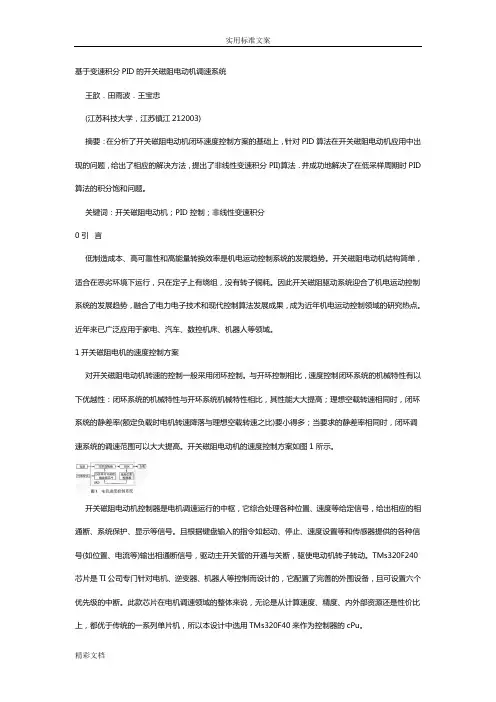
1开关磁阻电机的速度控制方案对开关磁阻电动机转速的控制一般采用闭环控制。
与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差率(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时,闭环调速系统的调速范围可以大大提高。
开关磁阻电动机的速度控制方案如图1所示。
开关磁阻电动机控制器是电机调速运行的中枢,它综合处理各种位置、速度等给定信号,给出相应的相通断、系统保护、显示等信号。
且根据键盘输入的指令如起动、停止、速度设置等和传感器提供的各种信号(如位置、电流等)输出相通断信号,驱动主开关管的开通与关断,驱使电动机转子转动。
TMs320F240芯片是TI公司专门针对电机、逆变器、机器人等控制而设计的,它配置了完善的外围设备,且可设置六个优先级的中断。
此款芯片在电机调速领域的整体来说,无论是从计算速度、精度、内外部资源还是性价比上,都优于传统的一系列单片机,所以本设计中选用TMs320F40来作为控制器的cPu。
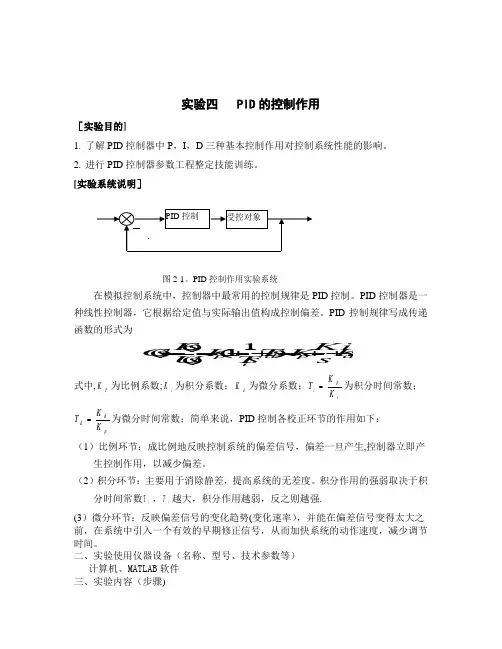
实验四 PID 的控制作用[实验目的]1. 了解PID 控制器中P ,I ,D 三种基本控制作用对控制系统性能的影响。
2. 进行PID 控制器参数工程整定技能训练。
[实验系统说明]图2-1。
PID 控制作用实验系统 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。
PID 控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。
PID 控制规律写成传递函数的形式为s K s KiK s T s T K s U s E s G dp d ip ++=++==)11()()()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;ip i KK T =为积分时间常数;pdd K K T =为微分时间常数;简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
(2)积分环节:主要用于消除静差,提高系统的无差度。
积分作用的强弱取决于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强.(3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
二、实验使用仪器设备(名称、型号、技术参数等) 计算机、MATLAB 软件 三、实验内容(步骤)1、在MATLAB命令窗口中输入“simulink"进入仿真界面。
2、构建PID控制器:(1)新建Simulink模型窗口(选择“File/New/Model"),在Simulink Library Browser中将需要的模块拖动到新建的窗口中,根据PID控制器的传递函数构建出如下模型:各模块如下:Math Operations模块库中的Gain模块,它是增益。
拖到模型窗口中后,双击模块,在弹出的对话框中将‘Gain’分别改为‘Kp’、‘Ki’、‘Kd’,表示这三个增益系数。
小调PID 控制算法一、 控制原理PID 控制器是一种线性控制器,其根据给定值c f 与实际值g f 构成控制偏差c g f f f ∆=-将偏差的比例P 、积分I 和微分D 通过线性组合构成控制量,其控制规律为p i dpid P K f I K fdtd fD K dty P I D=∆=∆∆==++⎰(1) 对(1)式经行拉氏变换,得p id pid P K F K I F SD K S F Y P I D=∆=∆=∆=++简单说来,PID 控制器各部分的作用如下:比例环节:即时成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
当仅有比例控制时系统输出存在稳态误差。
积分环节:主要用来消除静态偏差。
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。
这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
微分环节:能反映偏差信号的变化趋势,在偏差信号值变得太大前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
PID 算法的框图如图一:图一有几点说明:1、微分环节采用不完全微分,因为理想微分对系统系统产生较大噪声,抗干扰性能也差。
2、开度给定与实际开度的差参与积分运算,也就是说实际控制量有频差和开度差共同决定。
二、 PID 离散算法与增量式算法由于PLC 控制是一种采样控制,因此前面的积分和微分不能直接使用,需要对(1)式进行离散化处理,以一系列的采样时刻k 代替连续时间t ,以和式代替积分,以增量代替微分,以τ表示采样周期即PLC 扫描周期,可得()*()p p Y k K F k =∆()*()*ki i i Y k K I i τ==∆∑1()(1)()(1)()d d d vdY k Y k F k F k Y k T K ττ--∆-∆-+=这种算法的缺点是,由于全量输出,每次输出均与过去的状态有关,计算时要对()F k ∆进行累加,PLC 运算工作量大。
基于Labview的变积分数字化PID调速运动控制系统研究控制系统过程中,积分增量不变。
而系统对积分项的要求是,系统偏差大时积分作用应减弱甚至全无,而偏差小时则应加强。
积分系数取大了就会产生超调,甚至积分饱和,取小了又迟迟不能消除静差。
因此,如何根据系统偏差大小改变积分速度,对于提高系统的品质是很重要的。
考虑到控制系统的稳定性与精确性,调速模块控制器采用变积分数字PID控制算法,可以较好地解决系统的品质问题。
变积分PID的基本思想是改变积分项的累加速度,使其与偏差大小相对应:偏差越大,积分越慢,反之越快。
为此设置系数f(e(k)),它是速度误差e(k)的函数。
当增大时,f减小,反之增大。
变积分的PID积分项表达式为:系数f与偏差当前值的关系可以是线性的或非线性的,可以设为f的值在[0,1]区间内变化,当|e(k)|差大于所给分离区间A+B后,f=0,不再对当前值e(k)进行继续累加;当偏差|e(k)|小于B时,加入当前值e(k),即积分项变为,与一般的PID积分项相同,积分动作达到最高速度;而当偏差|e(k)|在B与A+B之间时,则累加计入的是部分当前值,其值在0~|e(k)|之间随|e(k)|的大小而变化,因此,其积分速度ui在和之间。
变积分PID的算法为[4]。
这种算法对A、B两个参数的要求不精确,参数容易整定。
系统中电枢控制式直流电机的数学模型为:式中:为电动机增益常数;为电动机时间常数;根据直流电动机的数学模型(4)式和变积分PID算法表达式(3)式以及其系数表达式(2)可以编写MATLAB程序,放入MATLAB节点模块中。
3 系统硬件结构系统硬件由数据采集卡、驱动模块、电动机、速度传感器、位置传感器、电流传感器等六部分组成。
图中虚线内部分为计算机,其中速度调节和位置调节以互换方式作用。
系统的硬件组成结构如图1所示。
3.1数据采集卡本系统中有三路输入,一路输出。
根据这个要求,本系统采用凌华的一款通用多功能数据采集卡PCI911DG,该卡具有16路分辨率为12位的模拟输入,一路12位模拟输出,16个数字I/O,可编程输入增益和输入范围可选择。
自动化控制系统中的PID调节器设计与参数配置在自动化控制系统中,PID(比例-积分-微分)调节器是一种常见且重要的控制机制。
它通过对系统输出与预期设定值之间的差异进行计算,使得系统能够实时调整输入信号以使输出更加稳定。
本文将详细介绍PID调节器的设计原理和参数配置方法。
一、PID调节器的设计原理PID调节器是基于反馈原理的控制器,通过不断对比被控对象的实际输出与期望输出之间的偏差,即误差,来调整输出信号,使误差趋向于零。
具体而言,PID调节器由比例控制、积分控制和微分控制三个部分组成。
1.比例控制(P)比例控制器根据误差的大小,按比例调整输出信号,即输出与误差成正比。
它能够快速响应系统的变化,但对于变异性较大的被控对象,单独使用比例控制往往无法将输出稳定在期望值附近。
2.积分控制(I)积分控制器根据误差的积分值,按一定比例调整输出信号,以消除偏差的累积效应。
积分控制能够消除稳态误差,但会导致系统的过冲和超调。
3.微分控制(D)微分控制器根据误差的变化率,按一定比例调整输出信号。
微分控制器可以预测系统的变化趋势,对快速变化的被控对象能够提供稳定的输出,但过度依赖微分控制可能导致噪声信号的放大。
二、参数配置方法PID调节器的性能取决于三个参数:比例增益(Kp)、积分时间(Ti)和微分时间(Td)。
为了提高系统的响应速度和稳定性,需要对这些参数进行适当的配置。
1.比例增益(Kp)比例增益决定了输出与误差之间的关系,过大或过小的Kp值都会导致系统的不稳定。
一般情况下,可以通过试探法逐渐增加Kp值,观察输出的响应速度和稳定性,找到合适的值。
此外,比例增益也可以根据被控对象的特性进行计算,如增益裕度法等。
2.积分时间(Ti)积分时间决定了积分控制的灵敏度,过大的Ti值会导致系统的超调和震荡,过小的Ti值则会导致系统的稳态误差。
一般而言,可以通过调整Ti值来平衡系统的响应速度和稳态误差。
较小的Ti值适合要求较高的响应速度,而较大的Ti值适合要求较低的稳态误差。
梯形变速积分PID 控制一、题目:用梯形变速PID 控制传递函数为G(s)的被控对象:G (s )=exp(-80)/(60s+1)二、原理:1、梯形积分算法:在PID 控制规律中积分作用是消除余差,为了减小余差,应提高积分项的运算精度,为此,用梯形算法代替常规的矩形算法。
梯形积分的算法为: T i e i e dt t e k i t 2)1()()(00-+=∑⎰= 写成迭代的形式为:Ts k error k error e e *2)1()(-++= 2、变速积分PID 算法:在普通的PID 算法中,由于积分系数ki 是常数,所以在整个控制过程中,积分增量不便。
而系统对积分项的要求是,系统的偏差大时积分作用应该减弱甚至无,而在偏差减小时则应加强。
积分系数取大了会产生超调,甚至积分饱和,取小了又延长消除静差的时间。
所以,变速积分PID 控制可以根据偏差的大小改变积分速度,提高系统的控制品质。
变速积分PID 的基本思想是,改变积分项的累加速度即积分的系数,使其与偏差的大小相对应;偏差越大,积分速度越慢;偏差越小,积分速度越快。
令)]([k e f 为一个关于偏差的函数:)]([k e f = 1 B k e ≤|)(|)]([k e f = A k e B A |)(|-+ B A k e B +≤<|)(|)]([k e f = 0 B A k e +>|)(|f 值在[0,1]之间变化,当偏差|)(|k e 大于所给分离区间A+B 后,f =0,不再对当前值)(k e 进行累加;当偏差|)(|k e 小于B 时,加入当前值)(k e ,即积分项变为T i e ki ki ∑=0)(,与一般的PID 积分项相同;积分动作达到最大;当偏差|)(|k e 在B 和B+A 之间,则累加计入的是部分当前值,其值在0~|)(|k e 之间随|)(|k e 的大小变化而变化,因此其积分速度在T i e ki k i ∑-=10)(和T i e ki ki ∑=0)(之间。
变速积分pid课程设计一、教学目标本课程的教学目标是使学生掌握变速积分PID控制的基本原理、算法及其在实际工程中的应用。
具体目标如下:1.知识目标:–了解PID控制的基本概念、原理和特点。
–掌握变速积分PID控制算法的数学推导和实现方法。
–理解变速积分PID控制在不同工程领域的应用。
2.技能目标:–能够运用变速积分PID算法解决实际工程问题。
–具备对PID控制系统进行参数调试和优化能力。
–能够使用相关软件工具进行变速积分PID控制算法的仿真和实现。
3.情感态度价值观目标:–培养学生的创新意识和团队合作精神,提高解决实际问题的能力。
–激发学生对自动控制领域的兴趣,树立正确的专业观念。
二、教学内容根据课程目标,教学内容主要包括以下几个部分:1.PID控制基本原理:介绍PID控制的概念、原理和特点,包括比例、积分、微分三个环节的作用和相互关系。
2.变速积分PID算法:讲解变速积分PID算法的数学推导过程,重点掌握速度项的引入和积分项的变步长调整方法。
3.变速积分PID控制应用:分析变速积分PID控制在不同工程领域的应用案例,如电机控制、机器人控制、温度控制等。
4.控制系统仿真与实现:使用相关软件工具,如MATLAB/Simulink,进行变速积分PID控制算法的仿真实验,并实际搭建控制系统进行验证。
5.参数调试与优化:讲解如何对变速积分PID控制系统进行参数调试和优化,以提高控制效果。
三、教学方法为了达到课程目标,采用以下教学方法:1.讲授法:讲解PID控制的基本原理、变速积分算法及其应用。
2.讨论法:学生分组讨论实际案例,引导学生思考和分析问题。
3.案例分析法:分析不同工程领域的变速积分PID控制应用案例,帮助学生更好地理解理论知识。
4.实验法:安排实验室实践环节,让学生动手搭建控制系统,并进行仿真实验。
四、教学资源为实现课程目标,准备以下教学资源:1.教材:选用权威、实用的教材,如《自动控制原理》、《PID控制技术》等。
课程设计报告设计题目变速积分PID控制系统设计课程名称计算机控制技术B姓名苏丹学号2008100731班级自动化0803 教师闫高伟设计日期2011年7月5日目录摘要............................................................ 错误!未定义书签。
Abstract .. (4)第1章数字PID及变速积分简介.................................... 错误!未定义书签。
1.1 数字PID发展介绍 (1)1.2 PID控制器工作原理 (2)1.2.1 模拟式PID控制算法.................................. 错误!未定义书签。
1.2.2 数字式PID控制算法 (3)1.3 变速积分简介............................................... 错误!未定义书签。
第2章系统分析与设计............................................ 错误!未定义书签。
2.1 系统功能分析............................................... 错误!未定义书签。
2.1.1 对象整体分析 (5)2.1.2系统分析与设计与系统开环增益 (6)2.2计算机系统选择分析 (6)2.2.1 8088CPU简介 (6)2.2.2 其余模块的使用 (7)2.3 软件设计分析 (12)第3章硬件设计与软件编程 (12)3.1 硬件设计 (12)3.1.1 系统方框图 (12)3.1.2 线路原理图 (12)3.2 软件编程 (13)3.2.1 软件流程图 (14)3.2.2 程序源代码 (21)第4章设计仿真与运行分析 (21)4.1 结果分析 (21)4.2 matlab仿真 (22)总结.............................................................................错误!未定义书签。
附录....... (26)附录1 线路原理图 (28)附录2 TDN-AC/ACS+教学实验系统介绍 (28)附录3 参考资料 (30)变速积分PID控制系统设计摘要PID校正装置(又称PID控制器或PID调节器)是一种有源校正装置,它是最早发展起来的控制策略之一,在工业过程控制中有着最广泛的应。
它具有结构简单、容易实现、控制效果好、鲁棒性强等特点,是迄今为止最稳定的控制方法。
它所涉及的参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。
从实际需要出发,一种好的PID控制器参数整定方法,不仅可以减少操作人员的负担,还可以使系统处于最佳运行状态。
因此,对PID控制器参数整定法的研究具有重要的实际意义。
在普通的PID调节算法中,由于积分系数KI是常数,因此,在整个调节过程中,积分增益不变。
但系统对积分项的要求是系统偏差大时积分作用减弱以至全无,而在小偏差时则应加强。
否则,积分系数取大了会产生超调,甚至积分饱和,取小了又迟迟不能消除静差。
改进的PID算法可以有效改变此现象。
此采用变速积分可以很好地解决这一问题。
本次课程设计基于自动控制原理实验箱(设备型号:TDN—ACS+),接好硬件电路以后实现变速积分。
并在matlab 6.5完成对变速积分的仿真。
关键词:PID控制算法;变速积分;matlab仿真AbstractSo far, the PID is the most common control arithmetic. It’s one of the most early developed control strategy, which is applied to the industry process. Its structure is simple and easy to implement, however, the control effect is perfect. The physical parameters is, meaning of ,theoretical analysis of system is integrity, and it is familiar by the engineering sector, which in the industrial process control has been widely used. For the actual needs, a good parameter PID controller tuning method can not only reduce the burden on operators, but also make the system running at best. Therefore, the fixed PID controller parameter tuning study has important practical significance.In the traditional PID control algorithm, the integral coefficient KI is constant throughout the adjustment process, the integral gain. But the system requirements for the integral term is the system error is large as well as no less integral action, and in the small deviation should be strengthened. Otherwise, the integral coefficient will have a big overshoot, or even integral saturation, whichever is smaller and the delay to eliminate static error. Improved PID algorithm can effectively change this behavior. The use of variable-speed integration can solve this problem. The course design is based on principles of automatic control test box (Model: TDN-ACS +), connected actual hardware circuit. After achieving a good connection speed integration circuit hardware. , use matlab 6.5 to complete the simulation for variable-speed integration.Keyword: PID control algorithm; variable-speed integration; matlab simulation错误!未指定书签。
第1章数字PID及变速积分简介1.1 数字PID发展介绍:PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
在工业过程控制中有着最广泛的应用,其实现方式有电气式、气动式和液力式。
它具有容易实现、控制效果好、鲁棒性强等特点,同时它原理简单,参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。
尽管自1940年以来,许多先进控制方法不断推出,但PID控制器仍被广泛应用于冶金、化工、电力、轻工和机械等工业过程控制中。
PID控制器是有源校正装置,与无源校正装置相比,它具有结构简单、参数易于整定、应用面广等特点,设计的控制对象可以有精确模型,并可以是黑箱或灰箱系统。
总体而言,它主要有如下优点:(1)原理简单,应用方便,参数整定灵活。
(2)适用性强。
可以广泛应用于电力、机械、化工、热工、冶金、轻工、建材、石油等行业。
1.2 PID控制器工作原理:1.2.1 模拟 PID 控制算法:图1典型模拟PID 结构框图如图1所示。
PID 控制器是通加对误差信号e(t)进行比例、积分和微分运算,其结果的加权,得到控制器的输出u(t),该值就是控制对象的控制值。
PID 控制器的数学描述为:(1—1)式中,u(t)—调节器的输出信号;e(t)—调节器的偏出信号;Kp —比例系数;Ti —积分时间常数;Td —微分时间常数。
1.2.2 数字式 PID 控制算法:在计算机控制系统中,使用的是数字PID 控制器,数字PID 控制算法通常又分为位置式PID 控制算法和增量式PID 控制算法。
(1) 位置式PID 控制算法 :由于计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量,故对模拟PID 算式中的积分和微分项不能直接使用,需要进行离散化处理。
按模拟PID 控制算法,现以一系列的采样时刻点kT 代表连续时间t ,以和式代替积分,以增量(一阶后插)代替微分,则可以作如下的近似变换:000t=kT(k=0,1,2)()()()()e(kT)-e(k-1)T e(k)-e(k-1)t k k j j e t dt e jT T e j de t dt T T ==⎛⎫⎪⎪ ⎪⎪≈= ⎪⎪ ⎪≈= ⎪⎝⎭∑∑⎰L (1-2) 显然,上述离散化过程中,采样周期T 必须足够短,才能保证有足够的精度。
为了书写方便,将e(kT)简化表示成e(k)等,即省去T 。
将式(2-2)代入式(2-1),可以得到离散的PID 表达式为:0(){()()[()(1)}1k Dp j T T u k K e k e j e k e k T T==++--∑ (1-3)式中:k — 采样序列号;u(k)— 第k 次采样时刻的计算机输出值;e(k)—第k 次采样时刻输入的偏差值;e(k-1)— 第k-1次采样时刻输入的偏差值;K i — 积分系数,K i =K P T/Ti ;K D —微分系数,K D =T D /T。
1.3 变速积分简介:变速积分作为改进的PID算法之一,它的基本思想是设法改变积分项的累加速度,使其与偏差的大小相对应:偏差越大,积分越慢;偏差越小,积分越快。