第七章交流电机34汇总
- 格式:ppt
- 大小:604.50 KB
- 文档页数:27
第7章交流电动机7.1三相异步电动机的构造7.2三相异步电动机的转动原理7.3三相异步电动机的电路分析7.4三相异步电动机转矩与机械特性7.5三相异步电动机的起动7.6三相异步电动机的调速7.7三相异步电动机的制动7.8三相异步电动机的铭牌数据7.9三相异步电动机的选择7.10同步电动机(略)7.11单相异步电动机1.了解三相交流异步电动机的基本构造和转动原理;本章要求:2. 理解三相交流异步电动机的机械特性,掌握 起动和反转的基本方法 , 了解调速和制动的 方法;3. 理解三相交流异步电动机铭牌数据的意义。
第7章 交流电动机电动机的分类:笼型电动机 线绕型电动机 同步电动机 异步电动机 电动机交流电动机直流电动机 他励、并励电动机串励、复励电动机第7章 交流电动机笼型异步交流电动机授课内容:基本结构、工作原理、 机械特性、起动、反转和调速的方法 。
7.1 三相异步电动机的构造转子 定子 壳体1.定子铁心:由内周有槽的硅钢片叠成。
U 1 --- U 2V 1 --- V 2W 1--- W 2三相绕组 机座:铸钢或铸铁2.转子 (1) 笼型转子铁芯槽内放铜条,端部用短路环形成一体,或铸铝形成转子绕组。
笼型绕线型铁心:由外周有槽的硅钢片叠成。
笼型转子 铸铝的笼型转子(2) 绕线型转子同定子绕组一样,也分为三相,并且接成星形。
绕线型异步电动机的构造转子: 在旋转磁场作用下, 产生感应电动势或电流。
风罩风扇 后端盖定子铁心出线盒定子绕组 转子绕组转子铁心前端盖 机座 三相异步电动机的构造笼型电动机与绕线型电动机的的比较:笼型:结构简单、价格低廉、工作可靠;不能人为改变电动机的机械特性。
绕线型:结构复杂、价格较贵、维护工作量大;转子外加电阻可人为改变电动机的机械特性。
Y系列三相异步电动机YR系列绕线转子三相异步电动机7.2三相异步电动机的转动原理7. 2. 1 旋转磁场()()︒+=︒-==120sin 120sin sin m 3m 2m 1t I i t I i tI i ωωω 定子三相绕组通入三 相交流电(星形联接)1.旋转磁场的产生 U 2i U 12V 1V 2W 1W 21i 3i L 1L 3L 2i3i 1i 2i mI otωU 1V 2W 1V 1W 2U 2n 规定i : “+” 首端流入,尾端流出。

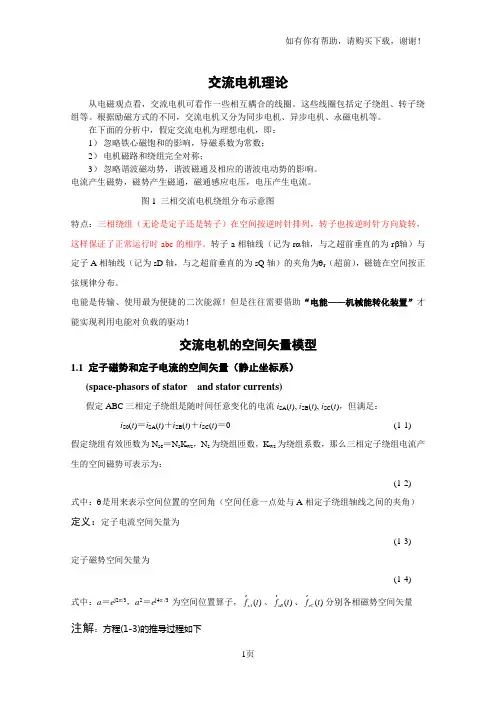
交流电机理论从电磁观点看,交流电机可看作一些相互耦合的线圈。
这些线圈包括定子绕组、转子绕组等。
根据励磁方式的不同,交流电机又分为同步电机、异步电机、永磁电机等。
在下面的分析中,假定交流电机为理想电机,即:1) 忽略铁心磁饱和的影响,导磁系数为常数;2) 电机磁路和绕组完全对称;3) 忽略谐波磁动势,谐波磁通及相应的谐波电动势的影响。
电流产生磁势,磁势产生磁通,磁通感应电压,电压产生电流。
图1 三相交流电机绕组分布示意图特点:三相绕组(无论是定子还是转子)在空间按逆时针排列,转子也按逆时针方向旋转,这样保证了正常运行时abc 的相序。
转子a 相轴线(记为r α轴,与之超前垂直的为r β轴)与定子A 相轴线(记为sD 轴,与之超前垂直的为sQ 轴)的夹角为θr (超前),磁链在空间按正弦规律分布。
电能是传输、使用最为便捷的二次能源!但是往往需要借助“电能——机械能转化装置”才能实现利用电能对负载的驱动!交流电机的空间矢量模型1.1 定子磁势和定子电流的空间矢量(静止坐标系)(space-phasors of stator and stator currents)假定ABC 三相定子绕组是随时间任意变化的电流i SA (t ), i SB (t ), i SC (t ),但满足:i S0(t )=i SA (t )+i SB (t )+i SC (t )=0 (1-1) 假定绕组有效匝数为N se =N s K ws ,N s 为绕组匝数,K ws 为绕组系数,那么三相定子绕组电流产生的空间磁势可表示为:(1-2) 式中:θ是用来表示空间位置的空间角(空间任意一点处与A 相定子绕组轴线之间的夹角) 定义:定子电流空间矢量为(1-3) 定子磁势空间矢量为(1-4) 式中:a =e j2π/3,a 2=e j4π /3 为空间位置算子,()sA f t 、()sB f t 、()sC f t 分别各相磁势空间矢量 注解:方程(1-3)的推导过程如下令 (1-5) 其中s θ为定子A 相电流的初始相位,又(1-6) 将式(1-5) 、(1-6)代入式(1-3),并整理可得(1-7) 所以(1-8) 式(1-3)里面之所以有2/3,是因为此处采用的等幅值变换,使()s i t 的模值与()S i t 的幅值相等,便于后面的计算。
第七章 三相交流异步电动机答案班级 姓名 学号1.额定功率都是4kW 的Y112M-4型和Y160M 1-8型三相异步电动机,其额定转速分别为1440r/min 和720r/min 。
它们的额定转矩各为多少?请说明电动机的极数、转速和转矩三者之间的关系。
解:Y112M-4电动机: T N =9550×P N /n N =9550×4/1440=26.53N ·mY160M 1-8电动机:T N =9550×P N /n N =9550×4/720=53.06N ·m 这说明电动机磁极对数越多,转速越低,而电动机的转矩越高。
2.Y112M-4型三相异步电动机,已知相关数据为U N =380V ,△接法,I N =8.8A ,P N =4kW ,ηN =0.845,n N =1440r/min 。
求:⑴在额定状态下的功率因数及额定转矩;⑵若电动机的起动转矩为额定转矩的2.0倍时,采用Y-△降压起动时的起动转矩。
解:⑴817.0845.08.838031043cos cos 33=⨯⨯⨯⨯==∴=N N N N N NN N N N I U P I U P ηϕϕηΘ53.261440495509550=⨯==n N N n P T N ·m ⑵ 06.53253.260.2=⨯==N st T T N ·m 69.1706.533131=⨯==st stY T T N ·m 3.有一台四极、50Hz 、1425r/min 的三相异步电动机,转子电阻R 2=0.02Ω,感抗X 20=0.08Ω,E 20=20V 。
求:⑴电动机在起动瞬间(n =0,s =1)时转子电流I 20,功率因数cos ϕ20;⑵额定转速时的E 2、I 2和cos ϕ2。
比较上述两种情况能得出什么结论? 解:⑴ 24108.002.02022220222020=+=+=XR E I A 241.008.002.002.0cos 2222022220=+=+=XR R ϕ⑵ 05.015001425150011=-=-=n n n s N N 所以 12005.0202=⨯==sE E V 49)08.005.0(02.02005.0)(2222022202=⨯+⨯=+=sX R sE I A98.0)08.005.0(02.002.0)(cos 222202222=⨯+=+=sX R R ϕ4.Y180L-6型三相异步电动机的额定电压为660/380V ,Y/△接法,接到工频线电压为380V 的电源上运行,测得I l =30A ,P 1=16.86kW 。

电机实用知识点总结一、电机的基本工作原理电机是将电能转换为机械能的设备,其基本工作原理是依靠电磁感应定律。
当导体在磁场中运动时,会产生感应电动势,从而在导体两端产生电压,导致电流的产生。
而电流会受到磁力的作用而产生力矩,驱动电机的转动。
根据这一基本原理,电机可以分为直流电动机和交流电动机两大类。
1. 直流电动机直流电动机是利用直流电源供电的电机,其结构简单,运行可靠,调速性能好。
在直流电动机中,电流通过电枢产生磁场,而电枢则受到外界磁场的作用而产生力矩转动。
直流电动机可以进一步分为分别励、串联励和复合励三种类型,根据其励磁方式的不同而运行特性也各异。
2. 交流电动机交流电动机是利用交流电源供电的电机,其结构复杂,但能适应各种负载和工况,应用范围广。
在交流电动机中,电流的方向和大小会不断变化,导致电机的磁场也不断变化,从而产生旋转磁场,驱动电机的转动。
根据旋转磁场的产生方式,交流电动机又可分为感应电动机和同步电动机两大类。
二、电机的分类根据电机的工作原理不同,可以将电机分为直流电动机和交流电动机两大类。
而根据其结构和用途不同,则可以细分为以下几种类型:1. 直流电动机(1)永磁直流电动机:不需要外部励磁,结构简单,运行可靠。
(2)串联直流电动机:适用于大功率、启动扭矩大的场合。
(3)分别励直流电动机:适用于需要精确调速的场合。
2. 交流电动机(1)感应电动机:结构简单,适用于起动转矩要求不高的场合。
(2)同步电动机:运行稳定,适用于需要精确同步转速的场合。
(3)异步电动机:运行可靠,适用于大功率负载和变频调速的场合。
3. 特种电动机(1)步进电机:适用于需要精确定位和控制的场合。
(2)直线电动机:将旋转运动转换为直线运动,适用于需要直线驱动的场合。
三、电机的选型在选择电机时,需要考虑以下几个方面的因素:1. 功率和转速根据负载的功率和转速需求,选择相应的电机型号和规格。
一般来说,功率越大的负载需要的电机越大,而转速要求越高的负载需要的电机也越大。
三相异步机的结构
Hz
P231 (P214) 练习与思考题
7.4.1三相异步电动机在一定的负载下运行时,如电源电
压降低,电动机的转矩,电流及转速有无变化?
7.4.2三相异步电动机在正常运行时,如果转子被卡住而不
动,试问这时电机的电流有何改变?对电机有何影响?
7.4.3 为什么三相异步电动机不在最大T max下运行?
7.4.4 某三相异步电动机的额定转速为1460r/min,当负载
为半载时电机的转速约为多少?
7.4.5三相鼠笼式异步电动机在额定状态附近运行时,当(1)负载增加;(2)电压升高;
(3)频率增高时,试分析说明其转速和电流作何变化?
一. Y-∆起动。