基于ADAMS的伸缩臂叉车铰点位置优化设计
- 格式:pdf
- 大小:231.74 KB
- 文档页数:4
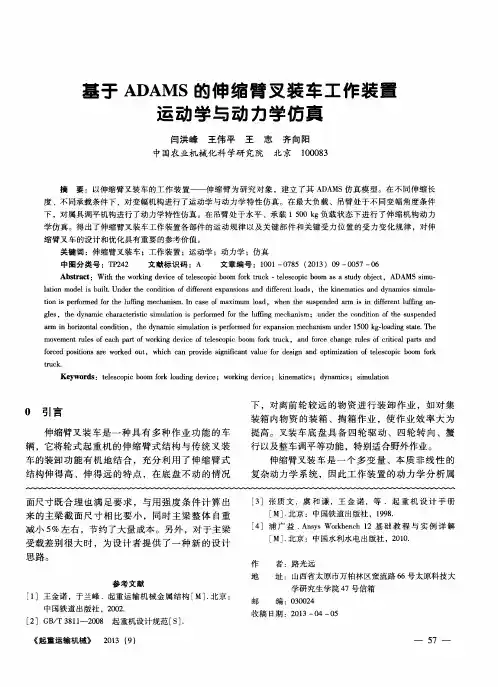
基于Adams的伸缩臂叉装车属具调平机构设计闫洪峰,王志,邹卓然,温琦,陈文科(中国农业机械化科学研究院,北京100083)[摘要]以伸缩臂叉装车属具液压调平机构为对象,在确定随动油缸和属具调平油缸参数后,采用ADAMS进行机构运动分析,确定其油缸的最佳布置位置以实现伸缩臂变幅过程中货叉属具的平动。
建立了参数化仿真模型,研究各变量的设计敏感度,实现了自动确定油缸最佳位置点。
该设计方法对新产品设计具有重要实用价值。
[关键词]伸缩臂叉装车;属具调平;机构运动学;仿真[中图分类号]TP242 [文献标识码]B [文章编号]1001-554X(2016)09-0062-04Leveling mechanism design for attachment of telescopic handlerbased on ADAMSYAN Hong-feng,WANG Zhi,ZOU Zhou-ran,WEN Qi,CHEN Wen-ke伸缩臂叉装车伸缩臂在变幅过程中,为保持属具既定姿态不变而采取的技术措施称为属具调平技术。
属具空中姿态不受伸缩臂变幅角度的影响,是伸缩臂叉装车的重要特性之一。
伸缩臂叉装车工作属具的调平技术主要有3种形式:液压调平、电子调平、电液调平。
采用随动油缸液压调平的方式,是根据液压补偿原理实现自动调平,该方法不能做到货叉精确调平,但结构简单,可靠性与环境适应性高,成本低、寿命长,是目前采用较多的调平机构。
机构运动学设计方法有图解法、瞬心法等多种,使用反复制图分析机构的运动,虽然直观、形象,但分析结果精度不高、过程复杂,效率低。
本文采用ADAMS动态仿真分析的方法,对属具调平机构进行运动学仿真,研究调平机构的设计方法。
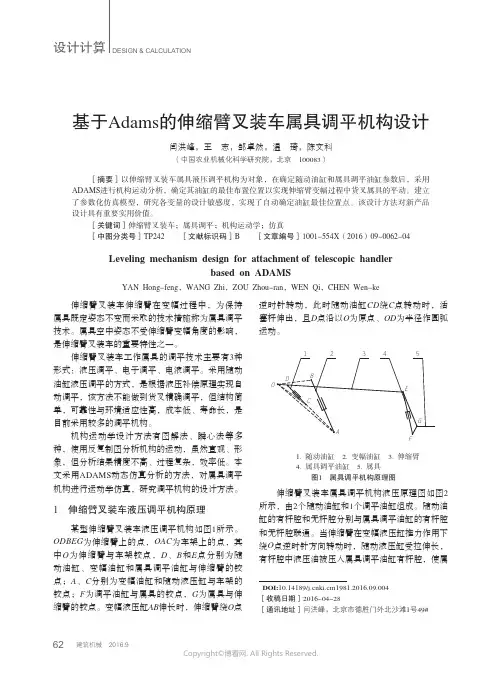
1 伸缩臂叉装车液压调平机构原理某型伸缩臂叉装车液压调平机构如图1所示。
ODBEG为伸缩臂上的点,OAC为车架上的点,其中O为伸缩臂与车架铰点,D、B和E点分别为随动油缸、变幅油缸和属具调平油缸与伸缩臂的铰点;A、C分别为变幅油缸和随动液压缸与车架的铰点;F为调平油缸与属具的铰点,G为属具与伸缩臂的铰点。
基于ADAMS的汽车起重机变幅机构优化设计汽车起重机变幅机构是汽车起重机的重要组成部分,主要负责实现起重机的变幅功能,从而适应不同工况下的起重需求。
随着汽车起重机应用场景的多样化和工作条件的复杂化,对变幅机构的性能和可靠性提出了更高的要求。
因此,基于ADAMS的汽车起重机变幅机构优化设计成为了一个热门的研究方向。
汽车起重机变幅机构的优化设计可以从以下几个方面入手:1.机构结构设计:根据工作条件和需求,选择合适的变幅机构结构。
常见的变幅机构包括摇臂式、筛桥式和伸缩臂式等。
摇臂式变幅机构结构简单,适用于较小起重机;筛桥式变幅机构结构复杂,适用于大型起重机;伸缩臂式变幅机构可以实现变幅范围更大的起重机。
通过ADAMS仿真分析不同机构结构的性能特点,选择合适的结构设计方案。
2.优化动力学性能:通过ADAMS仿真分析变幅机构的动力学性能,包括起动和停止的平稳性、运动过程中的振动和冲击等。
针对不足之处进行结构优化,提高变幅机构的动态性能。
例如,在摇臂式变幅机构中增加减震器,减小振动和冲击。
3.提高变幅机构的运动精度:汽车起重机变幅机构的运动精度对于起重操作的稳定性和安全性至关重要。
通过ADAMS仿真优化变幅机构的控制系统,提高变幅机构的位置控制精度和速度控制精度。
例如,在伸缩臂式变幅机构中引入闭环控制,增加传感器和执行器,实现精确控制。
4.增强变幅机构的可靠性和安全性:汽车起重机变幅机构的可靠性和安全性是设计时需要考虑的关键因素。
通过ADAMS仿真分析变幅机构在不同工况下的承载能力和稳定性,进行结构优化。
例如,在关键部位增加强度和刚度,提高变幅机构的承载能力和抗震能力。
总之,基于ADAMS的汽车起重机变幅机构优化设计可以通过仿真分析不同设计方案的性能特点,优化机构结构、动力学性能、运动精度和可靠性等方面,从而提高变幅机构的性能和可靠性,满足不同工况下的起重需求。
这对提高起重机的工作效率和安全性具有重要意义。
基于ADAMS的步履式机器人铰点力及作业参数仿真分析王福德,寇智慧,张云(徐工集团道路机械事业部,江苏徐州221004)[摘要]将Pro/E中创建的步履式机器人的三维模型导入ADAMS,建立了虚拟仿真模型,并添加约束、运动、外力和step函数,通过多次仿真分析,得出步履式机器人各铰点力变化曲线及最大受力峰值,并对各作业参数进行了仿真分析,得到最大挖掘半径、最大挖掘高度、最大卸载高度、最大挖掘深度以及最小回转半径等作业参数。
仿真过程及结果为步履式机器人结构的设计及优化、有限元分析、力学性能的校核以及作业性能的提升提供了理论依据。
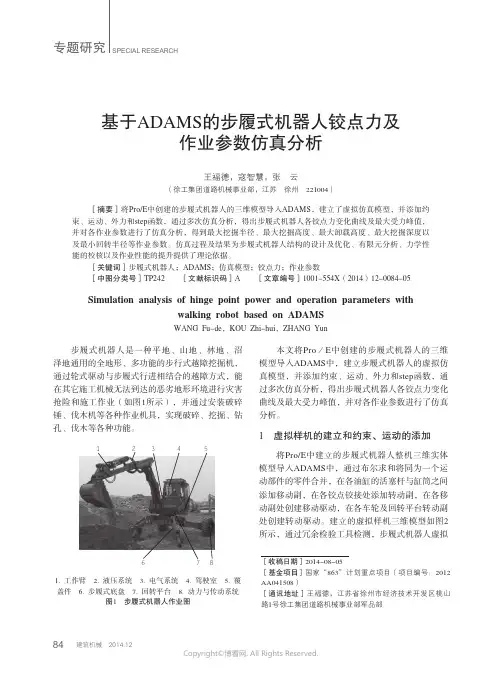
[关键词]步履式机器人;ADAMS;仿真模型;铰点力;作业参数[中图分类号]TP242 [文献标识码]A [文章编号]1001-554X(2014)12-0084-05Simulation analysis of hinge point power and operation parameters withwalking robot based on ADAMSWANG Fu-de,KOU Zhi-hui,ZHANG Yun步履式机器人是一种平地、山地、林地、沼泽地通用的全地形、多功能的步行式越障挖掘机,通过轮式驱动与步履式行进相结合的越障方式,能在其它施工机械无法到达的恶劣地形环境进行灾害抢险和施工作业(如图1所示),并通过安装破碎锤、伐木机等各种作业机具,实现破碎、挖掘、钻孔、伐木等各种功能。
123456781. 工作臂2. 液压系统3. 电气系统4. 驾驶室5. 覆盖件6. 步履式底盘7. 回转平台8. 动力与传动系统图1 步履式机器人作业图本文将Pro/E中创建的步履式机器人的三维模型导入ADAMS中,建立步履式机器人的虚拟仿真模型,并添加约束、运动、外力和step函数,通过多次仿真分析,得出步履式机器人各铰点力变化曲线及最大受力峰值,并对各作业参数进行了仿真分析。
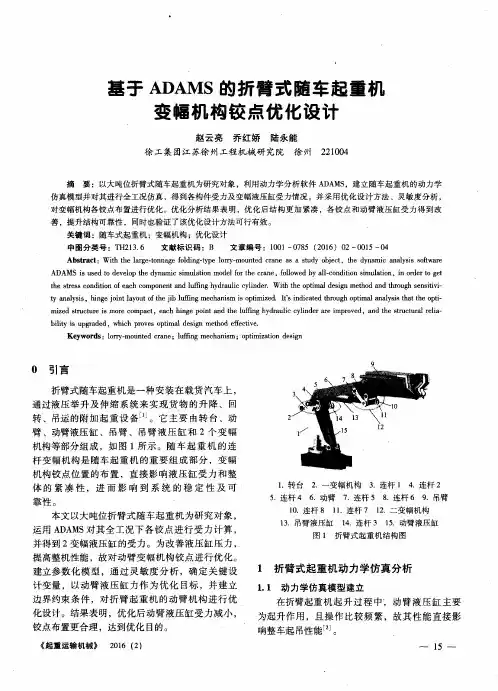
基于ADAMS的折臂式随车起重机变幅机构铰点优化设计随车起重机是一种常见的工程机械设备,用于搬运货物、搭建桥梁和建筑物等。
其功能受限于变幅机构的设计,因此对变幅机构的优化设计非常重要。
ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种基于多体动力学原理的仿真软件,可用于分析和优化机械系统的动力学性能。
通过在ADAMS中建立起重机的多体模型,可以分析和优化起重机的动力学行为。
折臂式随车起重机的变幅机构是由铰点组成的,通过改变铰点的位置可以实现变幅功能。
因此,铰点的位置对变幅机构的性能有重要影响。
在进行折臂式随车起重机变幅机构铰点优化设计时,下面是一些可能的步骤和考虑因素:1.定义设计目标:首先需要明确优化设计的目标。
例如,可以根据起重机的最大变幅范围和工作条件,确定最佳铰点位置以实现最佳变幅性能。
2.建立起重机的模型:使用ADAMS软件,建立起重机的多体模型。
模型应包括起重机的主体和相关的机构,如变幅机构和起动机构。
3.定义约束条件:根据起重机的工作条件,确定相关的约束条件。
例如,起重机的最大负载、最大变幅角度和应力等。
4.创建设计变量:选择适当的设计变量以优化变幅机构的铰点位置。
这些变量可以是铰点的坐标或角度等。
5.运行仿真和优化:利用ADAMS的仿真功能,通过改变设计变量的值,分析起重机在不同条件下的动力学行为。
通过观察起重机的变幅范围、稳定性和应力等参数,评估不同铰点位置的性能。
6.优化设计变量:根据仿真结果,对设计变量进行优化。
可以使用ADAMS的优化模块,通过遗传算法或其他优化算法,找到最佳的设计变量组合。
7.评估优化结果:分析优化结果,评估优化方案的有效性。
比较优化前后的性能指标,如变幅范围、稳定性和应力等。
8.进行模型验证:通过制造和测试实际的起重机样机,验证优化设计的性能和可行性。
9.优化结果的应用:将优化结果应用到实际的起重机设计中。
基于虚拟样机ADAMS 的运管机起吊装置铰点优化设计陈志斌,李安良,何清荣,陈殿春(泸州长起特种起重设备有限公司,四川 泸州 646006)[摘要]本文针对运管机起吊装置变幅铰点系统,通过ADAMS 虚拟样机建立仿真模型并优化,以减小油缸最大压力及压力波动为目的,引入权重系数,建立多目标优化函数并对铰点位置进行优化求解。
[关键词]虚拟样机;ADAMS ;运管机;变幅铰点;优化[中图分类号]TE97 [文献标识码]B [文章编号]1001-554X (2018)06-0092-04Optimization design of hinge point for lifting device of pipe conveyor based onvirtual prototype ADAMSCHEN Zhi -bin ,LI An -liang ,HE Qing -rong ,CHEN Dian -chun运管机主要用于石油管道铺设过程中,对油管进行运输并将油管吊装到坑道。
运管机起吊装置采用3节伸缩式起重臂、倒“π”式箱型转台、双缸变幅、外啮合回转及内藏式起升机构,配置具有远距离无线遥控功能的电液控制系统,主要由回转支承、转台、伸缩臂、起重钩及变幅油缸、伸缩油缸、起升机构、回转机构等组成。
通过回转、变幅、起升、伸缩臂的单独或复合动作,改变伸缩臂长度、仰角、方位以及起重钩上升/下降,以满足作业幅度、起升高度及作业方位,从而实现起吊装置的所有作业功能。
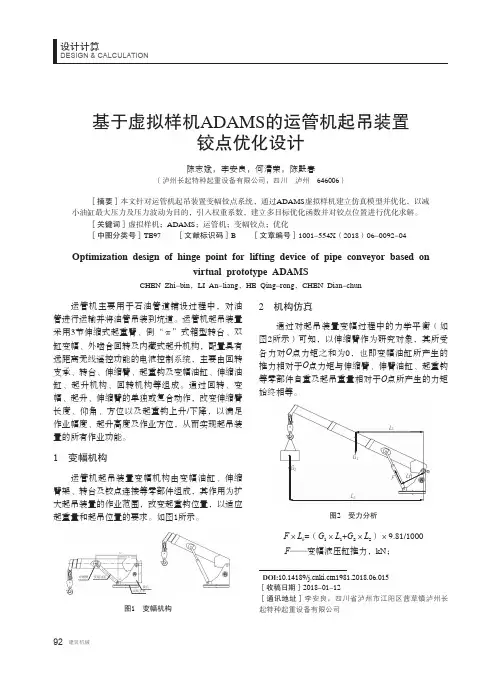
1 变幅机构运管机起吊装置变幅机构由变幅油缸、伸缩臂架、转台及铰点连接等零部件组成,其作用为扩大起吊装置的作业范围,改变起重钩位置,以适应起重量和起吊位置的要求。
如图1所示。
转台BA变幅油缸伸缩臂回转支承S 2S 4S 3S 1图1 变幅机构2 机构仿真通过对起吊装置变幅过程中的力学平衡(如图2所示)可知,以伸缩臂作为研究对象,其所受各力对O 点力矩之和为0,也即变幅油缸所产生的推力相对于O 点力矩与伸缩臂、伸臂油缸、起重钩等零部件自重及起吊重量相对于O 点所产生的力矩始终相等。
基于ADAMS的调平机构优化潘彬 曹晓峰 郑继平 宋曦 陈志豪 解攀虎(湖南星邦智能装备股份有限公司 湖南长沙 410600)摘要:在臂架式高空作业平台的升降过程中,对工程平台进行调平是非常重要的内容。
通过对调平机构的优化,可以更好地确保工作平台的水平姿态。
该文对一种高空作业平台调平机构进行了优化设计,采用ADAMS对调平机构的铰点进行了设计研究,使臂架在变幅过程中上下调平油缸保持同步,工作平台水平度达到设计要求,成功实现了机构的优化设计。
关键词:ADAMS 调平机构 臂架式高空作业平台 动力学模型中图分类号:TH242文献标识码:A 文章编号:1672-3791(2023)14-0064-04 Optimization of the Leveling Mechanism Based on ADAMSPAN Bin CAO Xiaofeng ZHENG Jiping SONG Xi CHEN Zhihao XIE Panhu(Hunan Sinoboom Intelligent Equipment Co., Ltd., Changsha, Hunan Province, 410000 China) Abstract:In the lifting process of the arm aerial work platform, it is very important to level the engineering plat‐form. By optimizing the leveling mechanism, the horizontal posture of the working platform can be better ensured. This paper optimizes the leveling mechanism of an aerial working platform, and uses ADAMS to design and study the hinge point of the leveling mechanism, so that the arm stand is synchronized with the up-down leveling cylin‐der in the process of amplitude variation,the levelness of the working platform meets design requirements, and the optimization design of the mechanism is successfully realized.Key Words: ADAMS; Leveling mechanism; Arm aerial work platform; Dynamical model臂架式高空作业平台在升降过程中,要保持工作平台处于水平姿态,就必须对工作平台调平。
基于ADAMS的叉车门架系统参数化建模及优化分析
曾红;李岩;张文广
【期刊名称】《起重运输机械》
【年(卷),期】2009(000)003
【摘要】利用ADAMS软件中参数化建模与分析功能,建立了叉车门架系统的参数化模型,以工作过程中倾斜液压缸最大拉力最小为目标函数,对倾斜液压缸的铰接点位置进行了设计研究和优化设计.
【总页数】4页(P46-49)
【作者】曾红;李岩;张文广
【作者单位】辽宁工业大学机械工程与自动化学院,121001;辽宁工业大学机械工程与自动化学院,121001;辽宁工业大学机械工程与自动化学院,121001
【正文语种】中文
【中图分类】TH2
【相关文献】
1.基于ADAMS的平衡重式叉车转向系统建模与优化设计 [J], 孙保群;何龙;夏光
2.基于ADAMS的汽车车盖参数化建模与优化分析 [J], 潘东亮;孙东明;张宝勇
3.基于ADAMS的备胎收放装置参数化建模及优化设计 [J], 彭超;李立顺;李红勋
4.基于ADAMS的横置液压缸式叉车转向系统参数化建模与仿真 [J], 曾红;张志华;陈静
5.基于ADAMS的剪叉机构的参数化建模及优化设计 [J], 刘洋;姜吉光
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS/Car 的双叉臂独立悬架优化设计张学荣1王若平1李成彬1严小俊2类雪2(1江苏大学汽车与交通工程学院,镇江212013)(2南京汽车集团有限公司名爵分公司,南京210031)Optimum design of double-wishbone independent suspension based on ADAMS/CarZHANG Xue-rong 1,WANG Ruo-ping 1,LI Cheng-bin 1,YAN Xiao-jun 2,LEI Xue 2(1School of Automobile and Traffic Engineering ,Jiangsu University ,Zhenjiang 212013,China )(2Nanjing Automobile(Group )Corporation ,Nanjing 210031,China )文章编号:1001-3997(2009)12-0264-03【摘要】利用ADAMS 建立了某国产跑车的双叉臂独立悬架的虚拟样机模型。
在ADAMS/CAR 中针对该跑车悬架系统进行仿真,研究悬架参数对操纵稳定性的影响并分析在路试过程中出现的操纵稳定性较差、轮胎磨损严重等问题的原因。
通过优化分析提出了悬架参数的改进意见。
关键字:ADAMS ;双叉臂式独立悬架;操纵稳定性;优化设计【Abstract 】It a virtual prototype model of a double-wishbone independent suspension of a certain domestic sports car was established under ADAMS .With the help of ADAMS/CAR ,the suspension system of this sports car has been simulated in order to study the effect of the suspension parameters on vechile handing stability and analyse the problems such as poor vechile handing stability ,serious tire wear and so on.Through the optimum design ,a improved suspension is obtained.Key words :ADAMS ;Double-wishbone independent suspension ;Vechile handing stability ;Op -timum design中图分类号:TH12,U463.1文献标识码:A*来稿日期:2009-02-201前言目前,跑车的导向机构大多是双叉臂式悬架,又称双A 臂式独立悬架。
《伸缩臂叉装车行走系统优化分析与实验研究》篇一一、引言随着现代物流和工程建设的快速发展,伸缩臂叉装车作为一种重要的装载和运输设备,其性能的优化对于提高工作效率和降低操作成本具有重要意义。
行走系统作为叉装车的关键组成部分,其性能的优劣直接影响到叉装车的整体作业效率和稳定性。
因此,本文将对伸缩臂叉装车行走系统进行优化分析,并通过实验研究验证其优化效果。
二、伸缩臂叉装车行走系统概述伸缩臂叉装车行走系统主要由驱动轮、导向轮、行走马达、减速器等组成。
其作用是使叉装车在各种路况下能够稳定、高效地行驶。
然而,在实际使用过程中,行走系统常因设计不合理、零部件磨损、路况复杂等因素导致性能下降,影响叉装车的作业效率。
三、行走系统优化分析1. 驱动轮与导向轮的优化设计针对驱动轮和导向轮的优化设计,可以通过改进轮胎材料、优化轮距和轮宽等措施,提高行走系统的抓地力和稳定性。
此外,采用更先进的轮系结构,如差速轮系,可以进一步提高叉装车在复杂路况下的行驶性能。
2. 行走马达与减速器的优化配置行走马达和减速器是行走系统的核心部件,其性能直接影响到叉装车的动力性和能耗。
通过优化马达和减速器的匹配,采用更高效的传动系统,可以降低能耗,提高叉装车的动力性能。
此外,采用先进的控制策略,如智能调速控制,可以进一步提高行走系统的运行效率。
四、实验研究为了验证行走系统优化的效果,我们进行了以下实验研究:1. 模拟实验在模拟不同路况的试验台上,对优化前后的行走系统进行性能测试。
通过对比分析,发现优化后的行走系统在抓地力、稳定性、动力性能等方面均有显著提高。
2. 实地测试在真实工况下,对优化后的伸缩臂叉装车进行实地测试。
测试结果表明,优化后的叉装车在各种路况下均能稳定、高效地行驶,且能耗降低,作业效率得到显著提高。
五、结论通过对伸缩臂叉装车行走系统的优化分析,我们发现通过改进驱动轮和导向轮的设计、优化行走马达和减速器的配置等措施,可以显著提高行走系统的性能。
基于ADAMS 和Ansys 的跨越设备回转装置铰点优化及结构分析伍峰平 黄松和 田宝桢西南交通大学 成都 610031摘 要:运用Matlab 计算跨越安全防护装置各运动部件的七次插值运动规律曲线,通过Solidworks 建立三维模型导入到ADAMS 中添加运动规律曲线进行联合仿真,得到初始时刻回转装置受力情况,找到最危险工况,以液压缸铰点受力的最小值为优化目标,通过分析得到的设计参数范围和约束条件得到优化后的值,通过Ansys 有限元分析,得到回转装置在两铰点上的受力情况,分析显示回转装置受力情况良好,为以后桁架结构的再优化提供空间。
通过优化后的模型进行仿真得到主塔液压缸铰点在全过程受力,校核主塔液压缸的拉压力,符合液压缸拉压杆稳定性要求,对回转装置的优化设计达到目的。
关键词:跨越设备;回转装置;曲线优化;结构优化;有限元中图分类号:U445.36 文献标识码:A 文章编号:1001-0785(2019)19-0065-05Abstract: Using Matlab to calculate the seven-time interpolation motion curve of each moving part of the safety protection device,the three-dimensional model is built into the ADAMS through Solidworks to add the motion law curve for joint simulation. The stress condition of the initial moment slewing device is obtained, and the most dangerous working condition is found. Taking the minimum value of the hydraulic cylinder hinge point as the optimization target, the optimized design values and constraints are obtained through the analysis. The Ansys finite element analysis is used to obtain the force of the rotary device on the two hinge points. The display of the rotating device is in good condition, which provides space for re-optimization of the truss structure in the future. Through the optimization of the model, the main tower hydraulic cylinder hinge point is subjected to the whole process stress, and the tensile pressure of the main tower hydraulic cylinder is checked, which meets the stability requirements of the hydraulic cylinder tension and compression rod, and achieves the optimized design of the rotary device for the purpose.Keywords: spanning equipment; slewing device; curve optimization; structural optimization; finite element0 引言随着我国铁路建设的飞速发展,越来越多新建的架空输电线路需要在已有铁路线路上端铺设输电线,而目前大多数情况是采用人工在铁路两端搭设脚手架的形式来实现跨越动作。
山东交通学院毕业生毕业论文(设计)题目:基于ADAMS的42吨集装箱叉车转向机构的仿真与优化设计系别工程机械系专业交通建设与装备班级交建072本文介绍了42t集装箱叉车的转向机构采用由横置液压缸组成的一组六连杆机构,为了保证车轮转向时作纯滚动,需对六连杆机构优化设计。
为了分析叉车的转向性能,采用ADAMS 软件对叉车的转向机构进行了建模仿真,测量了该转向机构的转角误差;实现了转向机构的参数化建模,以转向机构的累计转角误差最小为目标函数对转向机构进行了优化设计,并建立了叉车的整车模型,测量了叉车的外转向轮误差和整车模型的转向半径变化曲线,为分析叉车的转向性能提供了依据。
并且以优化设计的结果为参数在ADAMS中建立叉车的整车模型,仿真结果证明优化设计的有效。
关键字:ADAMS;转向机构;仿真;优化设计This article describes the 42t container forklift steering hydraulic cylinder used by the tap of a group composed of six-bar linkage, in order to ensure the steering wheel, made of pure rolling, the need for optimization of six-bar linkage design. To analyze the forklift's steering performance, the use of ADAMS, the steering mechanism on the truck the modeling and simulation, measuring the angle of the steering error; to achieve a steering mechanism of the parametric modeling, the steering angle error of the cumulative goal of minimizing function of the steering mechanism was optimized, and the establishment of a forklift vehicle model, measured outside the steering wheel forklift model error and the vehicle turning radius curve, analysis of the forklift's steering provided. And the results to optimize the design parameters to create the forklift vehicle ADAMS model, simulation results show that the effective optimal design.Key words: ADAMS;Steering system; simulation; Optimization design目录前言 (1)1绪论 (2)1.1本文研究的背景 (2)1.2虚拟样机技术 (2)1.2.1虚拟样机技术 (3)1.2.2 虚拟产品的开发流程 (3)1.3ADAMS软件的介绍 (5)1.3.1 ADAMS软件的概述 (5)1.3.2 ADAMS软件基本模块 (7)1.3.3 ADAMS 仿真分析步骤 (10)1.4平面连杆机构 (11)1.4.1 连杆机构的特点 (11)1.4.2 42吨集装箱叉车转向机构的连杆机构 (12)1.4.3横置液压缸式转向桥的结构形式 (12)2利用ADAMS对叉车转向机构进行建模 (14)2.1叉车转向机构的建模 (14)2.2应用ADAMS创建转向机构模型 (14)2.2.1启动ADAMS (14)2.2.2设置工作环境 (15)2.2.3创建设计点 (16)2.2.4创建机构的各个部件 (16)2.2.5创建车轮和地面 (17)2.2.6 保存模型 (21)3转向机构的仿真 (22)3.1叉车转向系统动力学仿真分析系统前处理模块 (23)3.2叉车转向系统动力学仿真分析系统分析计算模块 (23)3.3叉车转向系统动力学仿真分析系统后处理模块 (25)4叉车转向机构的优化设计 (26)4.1定义设计变量 (27)4.2定义目标函数 (29)4.3确定约束条件 (30)4.4优化模型 (30)5创建整车模型,仿真叉车的转向运动轨迹 (32)结论 (34)致谢 (35)参考文献 (36)前言叉车是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆。
基于ISIGHT的伸缩臂式叉装车工作装置轻量化设计
邱栋;崔国华;广云鹏
【期刊名称】《科技创新与应用》
【年(卷),期】2015(000)024
【摘要】叉装车伸缩臂占整车工作装置质量的较大比重,因此伸缩臂合理的结构设计就显得尤为重要。
首先建立了叉装车工作装置的结构模型,主要利用ISIGHT 软件搭建多目标优化平台,预先结合灵敏度分析,选择优化目标,搭建优化模型,并以减轻质量为主要目标,最终合理的选取最优解达到轻量化效果,从而确定了基本臂的最终优化结果以及其他剩余臂的结构尺寸,使伸缩臂的质量减轻了7.9%。
【总页数】2页(P1-2)
【作者】邱栋;崔国华;广云鹏
【作者单位】河北工程大学机电工程学院,河北邯郸 056038;河北工程大学机电工程学院,河北邯郸 056038;河北工程大学机电工程学院,河北邯郸 056038【正文语种】中文
【相关文献】
1.伸缩臂式叉装车调平机构铰点位置优化
2.基于Adams的伸缩臂叉装车属具调平机构设计
3.基于稳定性分析的伸缩臂叉装车重心位置研究
4.基于 ADAMS 的伸缩臂叉装车工作装置运动学与动力学仿真
5.伸缩臂叉装车后置式发动机散热系统的设计
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS的伸缩臂叉车铰点位置优化设计第二炮兵工程学院胡舂王佑君总后建筑工程研究所侯忠明王胜军辛涛
与常规叉车相比,伸缩臂叉车因为有效作业距离大,作业高度高,能够越过部分障碍工作,可以更换属具等特点,自其诞生以来,受到了市场欢迎¨。
伸缩臂叉车铰点位置的确定及由此而确定的变幅液压缸的负载值和压力冲击,直接影响变幅液压缸的稳定性和工作可靠性,引起振动和噪声等现象s因此伸缩臂叉车铰点位置的优化对于改善伸缩臂叉车的工作环境和稳定性及可靠性具有十分重要的意义。
伸缩臂叉车(见图1)工作机构包括伸缩臂、折臂、调平机构、工作属具及变幅液压缸、伸缩液压缸、折臂液压缸、调平液压缸等,通过伸缩臂、折臂和调平机构的单独或复合动作实现伸缩臂叉车的所有功能。
图l伸缩臂叉车不意图
1伸缩臂叉车工作机构仿真
通过对伸缩臂的力学分析可知,活塞杆产生的力矩与伸缩臂、折臂的重量及货叉和起重量所产生的力矩相等。
折臂液压缸和调平液压缸可以使折臂和货叉始终保持水平,以伸缩臂叉车最大作业距离、折臂和货叉保持水平和最大起重量工况为最恶劣工况,建立其样机仿真模型。
1.1模型建立
伸缩臂叉车工作机构如图2所示。
在变幅过程中,由于各构件变形量很小,假设各构件为刚体。
创建铰点位置O、A、B和C、D、E、F点,一42一各点坐标如表l所示。
创建连杆OC、CD、DE、BF代表伸缩臂、折臂、货叉及B铰点与伸缩臂的连接件(B铰点距伸缩臂中线距离),通过布尔加操作合并BF连杆与Oc连杆。
在AB方向上以kngth为DM(A,B)建立2个圆柱体分别代表变幅液压缸的缸筒和活塞杆嵋J。
A
图2伸缩臂叉车工作机构简图
1.伸缩臂2.变幅液压缸3.折臂4.货叉
表l各点坐标值m.铰点Xy
O0.O0.0
A0.85一1.2
B2.507—0.192
C10.281一1.427
D11.50l一1.427
E12.70l—1.427
F2.486—0.345
1.2添加约束
在O、A点创建转动副,在B点创建伸缩臂与活塞杆间的转动副,在C点创建折臂与伸缩臂间的转动副,在D点创建货叉与折臂间的转动副,在活塞杆和缸筒问创建移动副。
另外为了使折臂和货叉在仿真过程中始终保持水平,创建1方盒构件,属性选onground,分别将折臂与方盒、货叉与方盒添加平行约束,方向设置为水平【3J。
1.3定义驱动
根据伸缩臂叉车的运动参数,对变幅液压缸
《起重运输机械:}
2009(6l、万方数据
万方数据
万方数据
基于ADAMS的伸缩臂叉车铰点位置优化设计
作者:胡犇, 王佑君, 侯忠明, 王胜军, 辛涛
作者单位:胡犇,王佑君(第二炮兵工程学院), 侯忠明,王胜军,辛涛(总后建筑工程研究所)
刊名:
起重运输机械
英文刊名:HOISTING AND CONVEYING MACHINERY
年,卷(期):2009,(6)
引用次数:0次
1.姚凯.侯忠明.王佑君.辛涛.侯宝科伸缩臂叉车发展现状及研发趋势[期刊论文]-起重运输机械 2008(8)
2.石博强ADAMS基础与工程范例教程 2007
3.王国强.张进平.马若丁虚拟样机技术及其在ADAMS上的实践 2002
4.MSC Software MSC.ADAMS FSP基础培训教程 2004
5.哈尔滨建筑工程学院工程起重机 1981
本文链接:/Periodical_qzysjx200906015.aspx
下载时间:2010年3月31日。