极坐标数据转换
- 格式:doc
- 大小:21.00 KB
- 文档页数:1

excle极坐标
在Excel中处理极坐标数据,需要进行一些特定的步骤。
以下是一种方法:
准备数据:首先,需要有一系列与极坐标相关的数据,如极径(Radius)、角度(Angle)等。
输入数据:在Excel工作表中,将这些数据输入到对应的列中。
例如,极径数据可以放在A列,角度数据放在B列。
转换公式:如果需要将极坐标转换为直角坐标,可以使用以下公式。
假设极径在A列,角度在B列(角度需要以弧度为单位):
X坐标(直角坐标)= A列* COS(B列)
Y坐标(直角坐标)= A列* SIN(B列)
应用公式:在C列和D列(或任何其他空列)中,分别输入上述公式来计算X和Y坐标。
确保将公式应用到整列或所需的数据范围内。
图表制作:使用Excel的图表功能,选择C列和D列的数据创建一个散点图。
这将显示转换后的直角坐标点。
格式化与调整:根据需要调整图表的格式和设置,例如添加标题、
轴标签、调整颜色等。
请注意,上述步骤提供了一种在Excel中处理极坐标数据的基本方法。
具体步骤可能会根据数据的具体格式和需求而有所不同。
一、计算器使用的状态对于两类计算器来说,使用的是数值计算,所采用的状态是十进制状态:1、学生计算器(KDT第一次屏幕显示第二次屏幕显示按2次,再按1,则进入十进制计算状态,这时在屏幕上会出现D的标志。
2、普通计算器(价格10元以内):按键直接按键,依次在屏幕上会分别显示:DEG、RAD、GRAD,表示十进制、弧度、百分率。
要选择DEG,即在屏幕上看到DEG的标志。
二、角度的输入与计算两种计算器都可以进行角度的运算以及转换:1、学生计算器(KDT(1例如输入129°59′26″,操作如下:输入1295926这时屏幕的第二行显示:129°59°26°,说明已经将角度输入(2)角度经过三角函数的计算之后,显示的角度是十进制,即129°59′26″屏幕上显示129.353336,这时需要将十进制的角度转换回六十进制。
按129.353336→129°59°26°。
2(1)角度的输入:输入角度要以六十进制输入,度和分秒以小数点隔开,可将六十进制的角度值转换成十进制,用于角度计算或三角函数计算。
具体操作如下:输入129.5926这时屏幕上显示结果129.9905556,可以进行角度的加减或三角函数计算。
(2)计算结果显示:当角度计算完毕后,需要显示角度的结果,即六十进制的角度结果,按具体操作如下:129.9905556→按这时屏幕上显示计算结果129.592600,可以将成果记录下来。
三、测量误差的精度评定(统计计算)两种计算器都可以进行标准偏差统计计算:1、学生计算器(KDT科灵通科学计算器):在标准偏差统计模式下(1示)其中nx x2m,即中误差。
(2)统计数据输入以及查看、修改:依次输入数据:-1.4→按-0.8→按+3.4→按-3.0→按-2.3→按+4.1如果输入过程中,某个数据输入错误并且已经存储在计算器中,可以用一个输入的数据。

坐标转换源代码--GPS定位程序(C++)GPS数据处理中为了满足不同的需要,处理的数据要进行坐标转换,得到在不同坐标系统下的结果,下面是笛卡尔坐标系,大地坐标系,站心地平坐标系(线型和极坐标形式)之间的转换源代码:头文件:#ifndef _COORDCOVERT_H#define _COORDCOVERT_H#include "stdlib.h"//WGS-84椭球体参数const double a=6378137.0;//长半轴const double flattening=1/298.257223563;//扁率const double delta=0.0000001;typedef struct tagCRDCARTESIAN{double x;double y;double z;}CRDCARTESIAN;typedef CRDCARTESIAN *PCRDCARTESIAN;//笛卡尔坐标系typedef struct tagCRDGEODETIC{double longitude;double latitude;double height;}CRDGEODETIC;typedef CRDGEODETIC *PCRDGEODETIC;//大地坐标系typedef struct tagCRDTOPOCENTRIC{double northing;double easting;double upping;}CRDTOPOCENTRIC;typedef CRDTOPOCENTRIC *PCRDTOPOCENTRIC; //站心地平坐标系(线坐标形式)typedef struct tagCRDTOPOCENTRICPOLAR{ double range;double azimuth;double elevation;}CRDTOPOCENTRICPOLAR;typedef CRDTOPOCENTRICPOLAR *PCRDTOPOCENTRICPOLAR;//站心地平坐标系(极坐标形式)//由笛卡尔坐标转换为大地坐标void CartesianToGeodetic (PCRDGEODETIC pcg, PCRDCARTESIAN pcc, double dSemiMajorAxis, double dFlattening);//pcg:指向所转换出的大地坐标的指针;//pcc:指向待转换的笛卡尔坐标的指针;//dSemiMajorAxis:参考椭球的长半轴;//dFlattening:参考椭球的扁率。
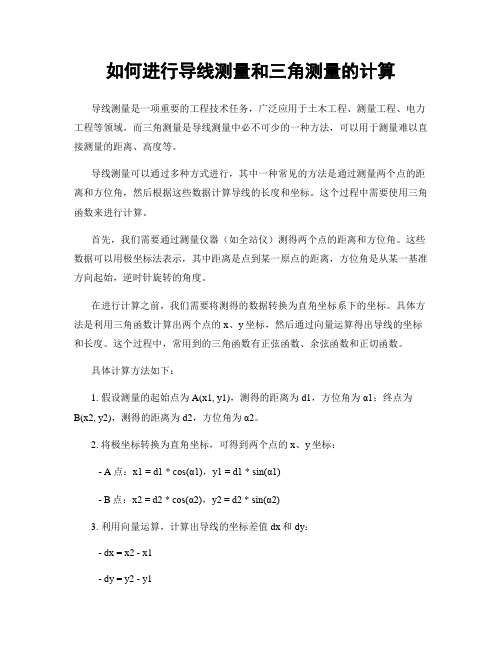
如何进行导线测量和三角测量的计算导线测量是一项重要的工程技术任务,广泛应用于土木工程、测量工程、电力工程等领域。
而三角测量是导线测量中必不可少的一种方法,可以用于测量难以直接测量的距离、高度等。
导线测量可以通过多种方式进行,其中一种常见的方法是通过测量两个点的距离和方位角,然后根据这些数据计算导线的长度和坐标。
这个过程中需要使用三角函数来进行计算。
首先,我们需要通过测量仪器(如全站仪)测得两个点的距离和方位角。
这些数据可以用极坐标法表示,其中距离是点到某一原点的距离,方位角是从某一基准方向起始,逆时针旋转的角度。
在进行计算之前,我们需要将测得的数据转换为直角坐标系下的坐标。
具体方法是利用三角函数计算出两个点的x、y坐标,然后通过向量运算得出导线的坐标和长度。
这个过程中,常用到的三角函数有正弦函数、余弦函数和正切函数。
具体计算方法如下:1. 假设测量的起始点为A(x1, y1),测得的距离为d1,方位角为α1;终点为B(x2, y2),测得的距离为d2,方位角为α2。
2. 将极坐标转换为直角坐标,可得到两个点的x、y坐标:- A点:x1 = d1 * cos(α1),y1 = d1 * sin(α1)- B点:x2 = d2 * cos(α2),y2 = d2 * sin(α2)3. 利用向量运算,计算出导线的坐标差值dx和dy:- dx = x2 - x1- dy = y2 - y14. 计算导线的长度L:- L = sqrt(dx^2 + dy^2)通过以上步骤,我们可以得到导线的长度和坐标。
这些数据对于土木工程和测量工程中的定位、设计和施工等工作具有重要的参考价值。
需要注意的是,在实际测量中,为了保证测量的准确性,还需要进行误差校正和数据处理。
在进行计算之前,需要对仪器和测量数据进行检查,排除人为误差和仪器偏差带来的影响。
此外,还需要进行数据的平差处理,使用各种数学模型来提高测量结果的精度和可靠性。

一、计算器使用的状态对于两类计算器来说,使用的是数值计算,所采用的状态是十进制状态:1、学生计算器(KDT科灵通科学计算器):按模式键第一次屏幕显示第二次屏幕显示按2次,再按1,则进入十进制计算状态,这时在屏幕上会出现D的标志。
2、普通计算器(价格10元以内):按键直接按键,依次在屏幕上会分别显示:DEG、RAD、GRAD,表示十进制、弧度、百分率。
要选择DEG,即在屏幕上看到DEG的标志。
二、角度的输入与计算两种计算器都可以进行角度的运算以及转换:1、学生计算器(KDT(1例如输入129°59′26″,操作如下:输入1295926这时屏幕的第二行显示:129°59°26°,说明已经将角度输入(2)角度经过三角函数的计算之后,显示的角度是十进制,即129°59′26″屏幕上显示129.353336,这时需要将十进制的角度转换回六十进制。
按129.353336→129°59°26°。
2(1)角度的输入:输入角度要以六十进制输入,度和分秒以小数点隔开,可将六十进制的角度值转换成十进制,用于角度计算或三角函数计算。
具体操作如下:输入129.5926这时屏幕上显示结果129.9905556,可以进行角度的加减或三角函数计算。
(2)计算结果显示:当角度计算完毕后,需要显示角度的结果,即六十进制的角度结果,按具体操作如下:129.9905556→按这时屏幕上显示计算结果129.592600,可以将成果记录下来。
三、测量误差的精度评定(统计计算)两种计算器都可以进行标准偏差统计计算:1、学生计算器(KDT科灵通科学计算器):在标准偏差统计模式下(1)进入标准偏差统计计算模式:按显示)其中nx x2m,即中误差。
(2)统计数据输入以及查看、修改:依次输入数据:-1.4→按-0.8→按+3.4→按-3.0→按-2.3→按+4.1→按如果输入过程中,某个数据输入错误并且已经存储在计算器中,可以用一个输入的数据。

极坐标傅里叶变换极坐标傅里叶变换是一种数学工具,它在信号处理和图像处理领域中得到广泛应用。
它通过将信号或图像表示为频率和相位的函数,可以更好地描述和分析这些数据。
本文将介绍极坐标傅里叶变换的基本原理和应用。
第一部分:引言在现代科学和工程中,我们经常需要分析和处理各种信号和图像。
信号和图像可以是声音、图像、视频等。
傅里叶变换是一种重要的数学工具,可以将信号或图像表示为不同频率的正弦和余弦函数的叠加。
然而,传统的傅里叶变换使用直角坐标系表示信号或图像,这在某些情况下可能不够方便。
因此,人们提出了极坐标傅里叶变换来更好地描述和分析信号和图像。
第二部分:极坐标傅里叶变换的原理极坐标傅里叶变换是将信号或图像表示为频率和相位的函数。
它首先将信号或图像转换为极坐标形式,即以距离和角度表示。
然后,它将极坐标形式的信号或图像进行傅里叶变换,得到频率和相位的函数。
极坐标形式的信号或图像具有一些特殊的性质,例如旋转不变性和尺度不变性,这使得极坐标傅里叶变换在某些应用中具有优势。
第三部分:极坐标傅里叶变换的应用极坐标傅里叶变换在信号处理和图像处理领域有许多应用。
其中一个重要的应用是图像压缩。
图像压缩是将图像表示为更小的数据集,以便更有效地存储和传输。
极坐标傅里叶变换可以将图像表示为频率和相位的函数,这样可以更好地捕捉图像的结构和纹理信息,从而实现更好的压缩效果。
另一个重要的应用是图像增强。
图像增强是通过改变图像的亮度、对比度和颜色等属性来改善图像的质量。
极坐标傅里叶变换可以提供图像的频率和相位信息,这样可以更好地理解图像的结构和纹理。
通过对频率和相位进行调整,可以改变图像的亮度、对比度和颜色等属性,从而实现图像增强的效果。
极坐标傅里叶变换还在模式识别和图像分析中得到广泛应用。
模式识别是通过识别和分类图像中的模式来实现自动识别和分类。
极坐标傅里叶变换可以提供图像的频率和相位信息,这样可以更好地识别和分类图像中的模式。
通过对频率和相位进行分析,可以提取出图像中的特征,并将其用于模式识别和图像分析。
极坐标和直角坐标转化的误差问题引言在数学和物理学中,极坐标和直角坐标是常见的两种坐标系统,用于描述点的位置。
极坐标以点与原点之间的距离 (r) 和点与正 x 轴之间的角度(θ) 为坐标,而直角坐标则以点在 x 轴和 y 轴上的投影 (x, y) 为坐标。
在许多实际应用中,我们需要在这两种坐标系统之间进行转化。
然而,在进行坐标转化时,会存在一定的误差问题。
极坐标到直角坐标的转化极坐标到直角坐标的转化可以根据以下公式进行计算:x = r * cos(θ)y = r * sin(θ)其中,x 和 y 分别为转化后的直角坐标的 x 和 y 分量,r 是极坐标中点与原点的距离,θ 是极坐标中点与正 x 轴的角度。
直角坐标到极坐标的转化直角坐标到极坐标的转化可以通过以下公式计算:r = sqrt(x^2 + y^2)θ = atan2(y, x)这里,r 表示点到原点的距离,θ 表示点与正 x 轴的夹角,atan2(y, x) 是一个可以正确处理各种四象限的反三角函数。
误差问题分析在进行坐标转化时,会存在一定的误差问题。
这主要是由于计算机的浮点数计算范围限制和舍入误差引起的。
浮点数计算范围限制计算机使用有限的二进制位来表示浮点数,因此存在浮点数范围的限制。
在进行坐标转化时,如果原始坐标值超过了浮点数表示的范围,就会导致溢出或下溢错误,从而引入误差。
舍入误差另外,浮点数的精度是有限的,无法表示所有的实数。
在进行坐标转化计算时,经过多次浮点数运算和舍入,都有可能引入误差。
特别是在进行大尺度的转化时,误差可能会显著累积。
降低误差的方法为了降低误差,我们可以采取以下方法:使用更高精度的数据类型在计算机程序中,可以选择使用更高精度的数据类型,如使用双精度浮点数或者使用任意精度计算库来进行坐标转化。
这样可以提高计算的准确性,但同时也会增加计算的开销。
控制浮点数运算顺序在进行坐标转化计算时,可以考虑调整运算顺序,以减少舍入误差的累积。
测量中常见的坐标转换方法和注意事项在测量工作中,坐标转换是一个非常关键的步骤。
它可以将不同坐标系下的测量数据进行转换,以便更好地进行分析和比较。
本文将讨论测量中常见的坐标转换方法和注意事项,以帮助读者更好地理解和应用这些知识。
一、常见的坐标转换方法1. 直角坐标系与极坐标系的转换直角坐标系和极坐标系是我们常见的两种坐标系,它们在不同的情况下都有各自的优势。
当我们在进行测量时,有时需要将直角坐标系转换为极坐标系,或者反过来。
这时我们可以使用以下公式进行转换:直角坐标系 (x, y) 转换为极坐标系(r, θ):r = √(x^2 + y^2)θ = arctan(y/x)极坐标系(r, θ) 转换为直角坐标系 (x, y):x = r * cosθy = r * sinθ2. 地理坐标系与平面坐标系的转换在地理测量中,我们常常需要将地理坐标系与平面坐标系进行转换。
地理坐标系是以地球表面为基准的坐标系,而平面坐标系则是在局部范围内采用平面近似地球的坐标系。
转换的目的是为了将地球上的经纬度转换为平面上的坐标点,或者反过来。
这时我们可以使用专门的地图投影算法进行转换,例如常见的墨卡托投影、UTM投影等。
3. 坐标系之间的线性转换有时,我们需要将一个坐标系中的点的坐标转换到另一个坐标系中。
这时我们可以通过线性变换来实现。
线性变换定义了一个坐标系之间的转换矩阵,通过乘以这个转换矩阵,我们可以将一个坐标系中的点的坐标转换到另一个坐标系中。
常见的线性变换包括平移、旋转、缩放等操作,它们可以通过矩阵运算进行描述。
二、坐标转换的注意事项1. 坐标系统选择的准确性在进行坐标转换时,必须保证所选择的坐标系统是准确可靠的。
不同的坐标系统有不同的基准面和基准点,选择错误可能导致转换结果出现较大误差。
因此,在进行测量时,我们应该仔细选择坐标系统,了解其基本原理和适用范围。
2. 数据质量的控制坐标转换所依赖的输入数据必须具有一定的质量保证。
极坐标与直角坐标的互化例题及答案解析一、题目1题目描述:已知极坐标$(r, \\theta)$,其中r=3,$\\theta=\\frac{\\pi}{6}$,求其对应的直角坐标(x,y)。
解析:根据极坐标与直角坐标的互化公式,$$ x = r \\cdot \\cos(\\theta) \\\\ y = r \\cdot \\sin(\\theta) $$代入已知数据,得到$$ x = 3 \\cdot \\cos\\left(\\frac{\\pi}{6}\\right) \\\\ y = 3 \\cdot\\sin\\left(\\frac{\\pi}{6}\\right) $$利用三角函数的特殊值,可得$$ x = 3 \\cdot \\frac{\\sqrt{3}}{2} = \\frac{3\\sqrt{3}}{2} \\\\ y = 3 \\cdot\\frac{1}{2} = \\frac{3}{2} $$所以,对应的直角坐标为$(x, y) = \\left(\\frac{3\\sqrt{3}}{2},\\frac{3}{2}\\right)$。
二、题目2题目描述:已知直角坐标(x,y),其中x=4,y=2,求其对应的极坐标$(r,\\theta)$。
解析:根据直角坐标与极坐标的互化公式,$$ r = \\sqrt{x^2 + y^2} \\\\ \\theta = \\arctan\\left(\\frac{y}{x}\\right) $$ 代入已知数据,得到$$ r = \\sqrt{4^2 + 2^2} \\\\ \\theta = \\arctan\\left(\\frac{2}{4}\\right) $$ 计算可得$$ r = \\sqrt{16+4} = \\sqrt{20} = 2\\sqrt{5} \\\\ \\theta =\\arctan\\left(\\frac{1}{2}\\right) $$所以,对应的极坐标为$(r, \\theta) = \\left(2\\sqrt{5},\\arctan\\left(\\frac{1}{2}\\right)\\right)$。
智能汽车的激光雷达标定智能汽车就是在普通车辆的基础上增加先进的传感器,比如雷达、控制器、执行器等装置,通过车载传感系统和信息终端实现与人、车、路等的智能信息交换使汽车具备智能的环境感知能力。
本文概述了激光雷达外部安装参数的标定以及单个激光雷达数据的数据转换,为激光雷达标定的进一步研究提供参考。
标签:智能汽车,激光雷达,参數标定激光雷达与车体为刚性连接,两者间的相对姿态和位移固定不变。
为了建立各个激光雷达之间的相对坐标关系。
需要对激光雷达的安装进行简单的标定,并将激光雷达数据从激光雷达坐标系统转换至车体坐标系上。
1.激光雷达外部安装参数的标定激光雷达外部安装参数的标定通常采用等腰直角三角标定板和正方形标定板来完成。
需要标定的激光雷达的安装参数为激光雷达的俯仰角与侧倾角。
首先用正方形标定激光雷达的侧倾角。
如图1所示,正方形ABCD为标定板,边长已知,激光雷达在位置O,则Y为激光雷达的侧倾角。
∠FOE,LOE 和LOF可由激光雷达测得,因此由余弦定理可得到∠EF,由此可得:标定得到激光雷达的侧倾角后,采用等腰直角三角标定板标定激光雷达的俯仰角。
如图2所示。
首先把标定板放于Al位置。
其中,∠B1是直角,∠F1OE1,LOE和LOF可由激光雷达测得,则可计算出∠FlEl。
根据计算出的激光雷达侧倾角,∠RD1=LEIF1×cosy,因此,等腰三角形中∠DIBl=∠BICl-∠DIE1。
把标定板移至42处,同理可得LD282。
由此可知激光雷达的俯仰角δ为:2.单个激光雷达数据的数据转换2.1建立激光雷达基准坐标系如图3所示,建立车辆质心坐标系Gxvyvzv,雷达基准坐标系,以及车头雷达坐标系O。
其中,YL沿车头雷达的扫射平面中心线方向。
激光雷达返回的数据是极坐标数据(i,d、转换为笛卡尔坐标(X,YL,ZL)为:图1激光雷达侧倾角的标定图2激光雷达俯仰角的标定式中:di为扫描距离;bn为激光雷达扫描起始角;A是设计采样步距;i是激光雷达数据序列号。
极坐标数据转换
一把用过的已知点的点号和坐标放在D盘CL文件夹中的KZDXYH.TXT文本文档中
二打开超级终端,在名称框中随便输入一个名字,在第二步设置中把波特率改为9600,然后在全站仪上找到当天测量的测量数据,然后在呼叫中点捕获文字,数据发送完毕后保存。
三打开保存的数据,第一次另存为D盘CL中的TOPGCSJ.TXT,第二次另存为D盘CL 中的TOPZBSJ.TXT。
四打开D盘CL 中的TOPCSJZH.EXE
五打开命令提示符,先输入CD\ 然后在输入D: 再输入CD CL 再输入J 出来数据后点EXIT-YES 再输入JC(检查)一直按回车直到检查结果出来,看两点的高差是否相差很大,如果相差不大则说明操作正确,如果相差很大可能是摆站和定向点号弄错,也可能是测量的时候后时忘记置0 可以在输入”J”后这一步中改一下正确的摆站和定向点。
检查正确后按EXIT-YES 然后输入COPY JZBGCSJ.TXT D:\JZB(加上自己建的文件夹的名字) 然后再输入COPY GJA.TXT D:\ZB(文件名),退出DOC命令,在D盘中就可以找到转换过来的数据文件夹。