e航海仪器演示版加入历考题含知识点
- 格式:pptx
- 大小:17.98 MB
- 文档页数:240

第一节航向与方位一、方向的确定、划分与换算1. 航海上方向的划分航海上常用的划分方向的方法有下列三种:(1)圆周法以正北为方向基准000°,按顺时针方向计量到正东为090°,正南为180°,正西为270°,再计量到正北方向为360°或000°。
圆周法始终用三位数表示,是航海上最常用的表示方向的方法。
(2)半圆法以正北或正南为方向基准,分别向东或向西计量到正南或正东,计量范围0°到180°。
用半圆法表示某方向时,除度数外,还应标明起算点和计量方向。
如:30°NE,150°SE,30°SW,150°NW。
(3)罗经点法如图所示:罗经点法以北、东、南、西四个基本Array方向为基点;将平分相邻基点之间的地面真地平平面方向称为隅点,即东北(NE)、东南(SE)、西南(SW)和西北(NW)四个方向;将平分相邻基点与隅点之间的地面真地平平面方向称为三字点,其名称有基点名称之后加上隅点名称组成,即北北东(NNE)、东北东(ENE)、东南东(ESE)、南南东(SSE)等八个方向;再将平分相邻基点或隅点与三字点之间的十六个地面真地平平面方向称为偏点,偏点的名称由基点名称或隅点名称之后加上偏向的方向来组成,例如:北偏东(N/E)、东北偏北(NE/N)、东偏北(E/N)等。
这样,四个基点、四个隅点、八个三字点和16个偏点,共计32个方向点,叫做32个罗经点。
2. 三种方向划分之间的换算根据航海实际的需要,三种方向之间的换算,通常是指将半圆法和罗经点法所表示的方向换算为相应的圆周法方向,其换算方法如下:(1)半圆法换算成圆周法的法则是:在北东(NE)半圆:圆周度数 = 半圆度数在南东(SE)半圆:圆周度数 = 180° - 半圆度数在南西(SW)半圆:圆周度数 = 180° + 半圆度数在北西(NW)半圆:圆周度数 = 360° + 半圆度数(2)罗经点法换算成圆周法的法则是:由于相邻两罗经点之间的角度为11°.25,因此,某个罗经点方向所对应的圆周方向,可根据该罗经点在罗经点法中的点数称以11°.25的法则确定。

陀螺罗经1、安许茨4型罗经,在纬度20°处起动时达稳定指北需3h,若起动状态一样,则在纬度60°处达稳定指北的时间 B 。
A.仍为3h B.大于3h C.小于3h D.A、B、C皆可能2、在北纬静止基座上,下重式罗经主轴指北端的稳定位置是 A 。
A.子午面内水平面之上 B.子午面内水平面之下C.子午面之东水平面之上 D.子午面之西水平面之下3、把自由陀螺仪改造为陀螺罗经,关键是要 B 。
A.克服地球自转B.克服地球自转角速度垂直分量所引起的主轴视运动C.克服地球自转角速度水平分量所引起的主轴视运动D.克服陀螺仪的定轴性4、一个自由陀螺仪要成为实用的陀螺罗经,必须对其施加 D 。
A.进动力矩和稳定力矩 B.控制力矩和稳定力矩C.进动力矩和阻尼力矩 D.控制力矩和阻尼力矩5、液体连通器式陀螺罗经在起动过程中,当主轴指北端向水平面靠拢时,阻尼力矩起到的作用。
AA.增进其靠拢 B.阻止其靠拢C.不起作用 D.以上都不对6、下列何种陀螺罗经采用西边加重物的垂直轴阻尼法 B 。
A.安许茨4型罗经 B.斯伯利37型罗经C.航海1型罗经 D.阿玛一勃朗10型罗经7、在北纬,船用陀螺罗经在稳定位置时,为什么其主轴要在水平面之上有一高度角,主要用于产生 A 。
A.控制力矩 B.阻尼力矩 C.动量矩 D.以上均错8、当陀螺罗经结构参数一定时,罗经等幅摆动的周期为84.4min所对应的纬度被称为 B 。
A.标准纬度 B.设计纬度 C.20° D.固定纬度9、高速旋转的三自由度陀螺仪其进动性可描述为 C 。
A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩D.在外力矩的作用下,陀螺仪主轴即能自动找北指北10、舒拉条件是指当陀螺罗经的等幅摆动周期为 C ,陀螺罗经不存在第一类冲击误差。

上 海 海 事 大 学 试 卷国家海事局三副适任证书统考《 航海仪器 》(模拟卷)参考答案<1> 何谓自由陀螺仪( )。
A .重心与其中心相重合的三自由度陀螺仪B .主轴可指向空间任意方向的陀螺仪C .不受任何外力矩作用的平衡陀螺仪D .高速旋转的三自由度陀螺仪<参考答案>c<2> 在垂直于陀螺仪主轴方向上加外力矩,陀螺仪主轴将产生进动,其进动角速度( )A .外力矩成正比,动量矩成正比B .外力矩成反比,动量矩成反比C .外力矩成正比,动量矩成反比D .外力矩成反比,动量矩成正比<参考答案>c<3> 三自由度陀螺仪在高速转动时,其主轴将指向( ),若在垂直主轴方向上加外力矩,主轴将( )。
A .空间某一方向,产生进动B .真北,指向真北C .空间某一方向,保持指向不变D .A 和C 对<参考答案>A<4> 在北纬自由陀螺仪主轴相对于午面向东做视运动,这是由于( )作用。
A 地球自转角速度B .地球自转角速度的水平分量C .地球自转角速度的垂直分量D .主轴高速旋转的角速度<参考答案>c<5> 若在赤道上,陀螺仪主轴位于子午面内,随地球自转罗经主轴指北端将( )。
A .向东偏B .向西偏C .保持在子午面内D .保持一定的高度角<参考答案>c<6> 陀螺罗经必须具有控制力矩,其作用是( )。
A .克服陀螺仪主轴在高度上的视运动B .消除纬度误差C .克服陀螺仪主轴在方位上的视运动D .消除速度误差<参考答案>c--------------------------------------------------------------------------------------装订线------------------------------------------------------------------------------------<7>机械摆式罗经等幅摆动的轨迹为一椭圆,若罗经结构参数不变,船位不变时( )。
第一篇航海学(地文航海)第一章坐标、方向和距离第一节地球形状和地理坐标一、地球形状1. 第一近似体――地球圆球体航海上为了计算上的简便,在精度要求不高的情况下,通常将大地球体看成地球圆球体。
2. 第二近似体――地球椭圆体在大地测量学、海图学和需要较为准确的航海计算中,常将大地球体看成两极略扁的地球椭圆体。
地球椭圆体即旋转椭圆体,它是由椭圆P N QP S Q′绕其短轴P N P S旋转而成的几何体(图1-1)。
表示地球椭圆体的参数有:长半轴a、短半轴b、扁率c和偏心率e。
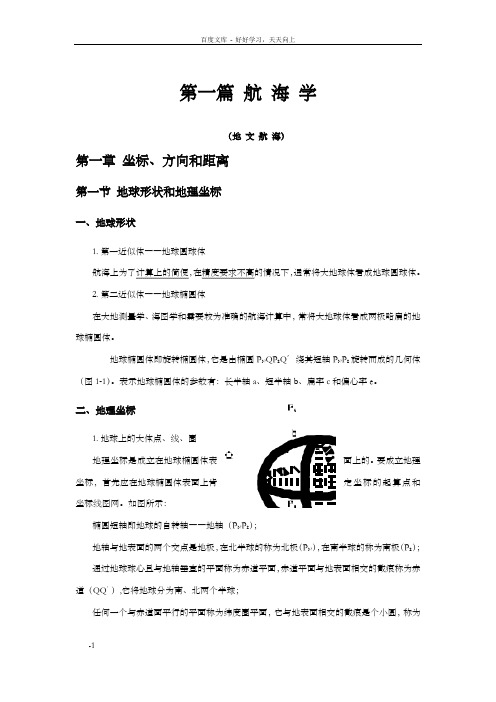
二、地理坐标1. 地球上的大体点、线、圈地理坐标是成立在地球椭圆体表坐标,首先应在地球椭圆体表面上肯坐标线图网。
如图所示:椭圆短轴即地球的自转轴――地轴(P N P S)地轴与地表面的两个交点是地极,在北半球的称为北极(P N),在南半球的称为南极(P S);通过地球球心且与地轴垂直的平面称为赤道平面,赤道平面与地表面相交的截痕称为赤道(QQ′),它将地球分为南、北两个半球;任何一个与赤道面平行的平面称为纬度圈平面,它与地表面相交的截痕是个小圆,称为纬度圈(AA′);通过地轴的任何一个平面是子午圈平面,它与地表面相交的截痕是个椭圆,称为子午圈(P N QP S Q′);由北半球到南半球的半个子午圈,叫作子午线,又称经线(P N QP S,P N Q′P S);通过英国伦敦格林尼治天文台子午仪的子午线,叫作格林子午线或格林经线(P N GP S)。
2. 地理坐标地球表面任何一点的位置,可以用地理坐标,即地理经度和地理纬度来表示。
地理经度简称经度,地面上某点的地理经度为格林经线与该点子午线在赤道上所夹的劣弧长,用λ或Long表示。
某点地理经度的气宇方式为:0°到180°计量。
向东气宇的称为东经,用E标示;向西气宇的称为西经,用W标示。
例如北京的经度为116°22.8'E。
地理纬度简称纬度,地球椭圆子午线上某点的法线与赤道面的夹角称为该点的地理纬度,用ϕ或Lat表示。


大学航海学考试练习题及答案41.[单选题]英版海图(额定光力射程)上某灯塔的灯质为FL(2)4S49m24M,测者眼高为16米,则能见度为12海里时:该灯塔灯光的最大可见距离为_________A大于24n mileA)@小于24nB)@ 等于23nC)@ 小于23n答案:C解析:2.[单选题]下列不属于失控船的为_________ 。
A)主机故障B)舵机失灵C)帆船无风D)大风浪中操纵极其困难答案:D解析:3.[单选题]下列说法错误的为_________ 。
A)军用船舶可以不遵守规则B)政府公务船可以不遵守规则C)军用船舶在本国领海上可以不遵守规则D)以上都是答案:D解析:第二节 一般定义(7~20)4.[单选题]某船真航向040,测得某物标真方位320,则该物标的相对方位(舷角)为:( )A)80B)080C)280D)310答案:C解析:5.[单选题]发现本船走锚时,值班驾驶员应:A)松链增加出链长度,通知机舱备车,报告船长B)报告船长,通知机舱备车,松链增加出链长度C)立刻抛另一锚使之受力,通知机舱备车,报告船长6.[单选题]船舶要加入以船舶搜索救助为目的的报告系统,只需向该系统中心()。
( )A)连续报告船位B)提交航行计划报告C)每天三次报告船舶动态D)每天提交中午报告答案:B解析:7.[单选题]航海观测中存在误差是在所难免的,但就观测误差的性质而 言,可以改正或消除或剔除的误差是______。
A)粗差、系统误差和随机误差B)粗差、系统误差C)系统误差和随机误差D)粗差和随机误差答案:B解析:8.[单选题]已知某型号多普勒计程仪设计跟踪深度为:海底跟踪:船底下水深1--200m,若航行区域的水深大于200m,则该计程仪所测得的速度为( )。
A)对地速度B)对水速度C)无法界定D)停止工作答案:B解析:9.[单选题]已知春分点格林时角等于315°,某星的格林时角等于 150°, 则该星的共轭赤经为________。
航海学大连海事大学1.1.1 地球形状·用大地球体描述地球形状,大地球体是大地水准面团城的球体.·常用的大地球体的近似体有两个:地球圆球体(用于简便的航海计算,如航迹计算,简易墨卡托海图绘制,大圆航向和航程计算);地球椭圆体(用于较精确的航海计算等,如定义地理坐标,墨卡托海图绘制)1.航海上为了简化计算,通常将地球当作:A.圆球体 B.椭圆体 C.椭球体 D.不规则几何体2.航海上进行精度较高的计算时,通常将地球当作:A.圆球体B.椭圆体 C.椭球体 D.不规则几何体3.航海学中,使用地球椭圆体为地球数学模型的场合是:I.描述地球形状时;II.定义地理坐标时;III.制作墨卡托投影海图时; IV.计算大圆航线时;V,制作简易墨卡托图网时 A.I、II B.II、III C.III、IV D.III、V4.航海学中,使用地球圆球体为地球数学模型的场合是:I.描述地球形状时; II.定义地理坐标时;III.制作墨卡托投影海图时;IV.计算大圆航线时;V.制作简易墨卡托图网时 A.Ⅰ、Ⅱ B.Ⅱ、Ⅲ C.Ⅲ、Ⅳ D.Ⅳ、Ⅴ5.航海学中的地球形状是指:A.地球自然表面围成的几何体 B.大地水准面围成的几何体C.地球圆球体 D.以上都对6.航海学中的地球形状用描述。
A.地球自然表面围成的几何体B.大地球体C.地球椭圆体 D.以上都对1.1.2 地理坐标1.1.2.1 地理经度和地理纬度的定义和度量方法 .地理坐标包括地理经度和地理纬度,是建立在地球椭圆体基础之上.地理经度(Long.,λ:格林经线和某地经线所夹的赤道短弧或该短弧所对应的球面角或球心角.地理纬度(lat.,ϕ):地球椭圆子午线上某点的法线与赤道面的交角.7.地理经度以作为基准线的A.赤道. B.格林经线 C.测者经线 D.测者子午圈8.某地地理经度是格林子午线与该地子午线之间的A.赤道短弧 B.赤道短弧所对应的球心角C.极角D.A.B.C都对9. 地理坐标的基准线是A.经线、纬线 B.赤道、经线C.格林子午圈、纬圈D.赤道、格林子午线10.地理经度的度量方法是A.由格林子午线向东度量到该点子午线,度量范围0~180ºB.由格林子午线向西度量到该点子午线,度量范围0~180ºC.由格林子午线向东度量到该点子午线,度量范围0~360ºD.A或B11.地理经度的度量方法是A.由该点子午线向东或向西度量到格林子午线,度量范围0~180ºB.由该点子午线向东或向西度量到格林子午线,度量范围0~360ºC.由格林子午线向东或向西度量到该点子午线,度量范围0~180ºD .由格林子午线向东或向西度量到该点子午线,度量范围0~360º12.所谓“地埋纬度”是指A .地球上某点的法线与赤道面的交角B .地球上某点和地心连线与赤道面的交角C .地球椭圆子午线上某点和地心连线与赤道面的交角D .某点在地球椭圆子午线上的法线与赤道面的交角13.地理经度和地理纬度是建立在_____基础上的。
一、航海陀螺罗经1. 高速旋转的三自由度陀螺仪其进动性可描述为_____。
A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩D.在外力矩的作用下,陀螺仪主轴即能自动找北指北答案:(C)2.何谓自由陀螺仪_____。
A.重心与其中心相重合的三自由度陀螺仪B.主轴可指向空间任意方向的陀螺仪C.不受任何外力矩作用的平衡陀螺仪D.高速旋转的三自由度陀螺仪答案:(C)3. 从工程技术角度,陀螺仪的定义为_____。
A.高速旋转的对称转子及保证转子主轴指向空间任意方向的悬挂装置B.转子及其悬挂装置的总称C.具有三自由度的转子D.高度旋转的对称刚体答案:(A)4. 何谓陀螺仪的定轴性_____。
A.其主轴指向地球上某一点的初始方位不变B.其主轴动量矩矢端趋向外力矩矢端C.其主轴指向空间的初始方向不变D.相对于陀螺仪基座主轴指向不变答案:(C)5. 三自由度陀螺仪在高速转动时,其主轴将指向_____,若在垂直主轴方向上加外力矩,主轴将_____。
A.空间某一方向,产生进动B.真北,指向真北C.空间某一方向,保持指向不变D.A和C对答案:(A)6. (D)满足下列_____时,陀螺仪才具有定轴性。
A.高速旋转B.陀螺仪中心与其重心重合C.不受任何外力矩D.A+B+C答案:(D)7. 在垂直于陀螺仪主轴方向上加外力矩,陀螺仪主轴将产生进动,其进动角速度与_____。
A.外力矩成正比,动量矩成正比B.外力矩成反比,动量矩成反比C.外力矩成正比,动量矩成反比D.外力矩成反比,动量矩成正比答案:(C)8. 自由陀螺仪的主轴动量矩指北,若加一外力矩,其方向水平向西,则主轴指北端_____进动。
A.水平向东B.水平向西C.垂直向上D.垂直向下答案:(B)9. 影响自由陀螺仪主轴不能稳定指北的最主要因素是_____。
《航海学(二三副)》一、单项选择题(共145题)1、电子海图数据是指描写海域地理信息和航海信息的数字化产品,是数字海图的一种。
从电子海图数据属性而言,下列说法正确的是______。
(176085:第11章电子海图显示与信息系统) (A-0,B-0,C-0,D-0,错误-0)A. 光栅海图是以空间数据和属性数据所组成的矢量数据描述海图及相关信息,光栅海图不可以被改正B. 矢量海图以空间数据和属性数据所组成的矢量数据描述海图及相关信息。
矢量数据可有多种文件格式按一定的方式保存信息C. 光栅海图是指以栅格形式(图像方式如TIF、JPG等格式文件)表示的数字海图,属非标准电子海图D. 矢量海图是指以栅格形式(图像方式如TIF、JPG等格式文件)表示的数字海图,属标准电子海图2、矢量海图的主要特点包括___。
(176585:第11章电子海图显示与信息系统) (A-0,B-0,C-0,D-0,错误-0)A:数据和可查询性、与存储介质无关B:更加安全C:数据和可查询性、与存储介质无关、物标可分类显示、可计算性D:显示美观3、关于矢量化海图和光栅扫描海图下列说法错误的是______。
(176090:第11章电子海图显示与信息系统)A. 光栅扫描海图可看作是纸质海图的复制品B. 光栅扫描海图可以进行选择性查询、显示和使用数据C. 矢量化海图是将数字化的海图信息分类存储的数据库D. 矢量化海图可以进行选择性查询、显示和使用数据4、ECDIS的航线监视能提供___。
(176594:第11章电子海图显示与信息系统) (A-0,B-0,C-0,D-0,错误-0)A:偏航报警、转向点提醒B:无海图提示C:油耗计算D:偏航报警、转向点提醒、转向点ETA、STG查询5、ECDIS中航线设计优越于手工航线设计是因为____。
(176598:第11章电子海图显示与信息系统) (A-0,B-0,C-0,D-0,错误-0)A:绘画美观B:安全自动检测C:参数自动计算、重复使用、安全自动检测D:用鼠标完成,设计简单6、ECDIS取代纸海图的主要条件是____。
0817.高速旋转的三自由度陀螺仪其进动性可描述为________。
A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩D.在外力矩的作用下,陀螺仪主轴即能自动找北指北0818. 何谓自由陀螺仪________。
A.重心与其中心相重合的三自由度陀螺仪B.主轴可指向空间任意方向的陀螺仪C.不受任何外力矩作用的平衡陀螺仪D.高速旋转的三自由度陀螺仪0819. 从工程技术角度,陀螺仪的定义为________。
A.高速旋转的对称转子及保证转子主轴指向空间任意方向的悬挂装置B.转子及其悬挂装置的总称C.具有三自由度的转子D.高速旋转的对称刚体0820. 何谓陀螺仪的定轴性________。
A.其主轴指向地球上某一点的初始方位不变B.其主轴动量矩矢端趋向外力矩矢端C.其主轴指向空间的初始方向不变D.相对于陀螺仪基座主轴指向不变0821. 三自由度陀螺仪在高速转动时,其主轴将指向________,若在垂直主轴方向上加外力矩,主轴将________。
A.空间某一方向,产生进动B.真北,指向真北C.空间某一方向,保持指向不变D.A和C对0822. 满足下列________时,陀螺仪才具有定轴性。
A.高速旋转B.陀螺仪中心与其重心重合C.不受任何外力矩D.A+B+C0823. 在垂直于陀螺仪主轴方向上加外力矩,陀螺仪主轴将产生进动,其进功角速度与________。
A.外力矩成正比,动量矩成正比B.外力矩成反比,动量矩成反比C.外力矩成正比,动量矩成反比D.外力矩成反比,动量矩成正比0824. 自由陀螺仪的主轴动量矩指北,若加一外力矩,其方向水平向西,则主轴指北端________进动。
A.水平向东B.水平向西C.垂直向上D.垂直向下0825. 影响自由陀螺仪主轴不能稳定指北的最主要因素是________。