提升机综合后备保护仪
- 格式:docx
- 大小:95.99 KB
- 文档页数:11
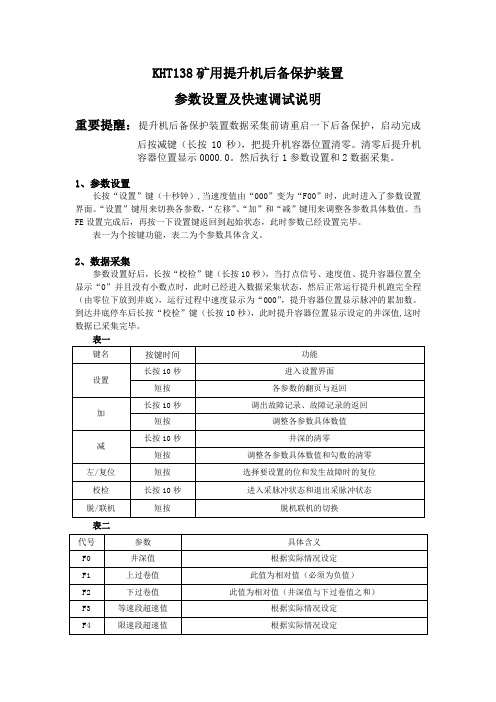
KHT138矿用提升机后备保护装置参数设置及快速调试说明重要提醒:提升机后备保护装置数据采集前请重启一下后备保护,启动完成后按减键(长按10秒),把提升机容器位置清零。
清零后提升机容器位置显示0000.0。
然后执行1参数设置和2数据采集。
1、参数设置长按“设置”键(十秒钟),当速度值由“000”变为“F00”时,此时进入了参数设置界面。
“设置”键用来切换各参数,“左移”、“加”和“减”键用来调整各参数具体数值。
当FE设置完成后,再按一下设置键返回到起始状态,此时参数已经设置完毕。
表一为个按键功能,表二为个参数具体含义。
2、数据采集参数设置好后,长按“校检”键(长按10秒),当打点信号、速度值、提升容器位置全显示“0”并且没有小数点时,此时已经进入数据采集状态,然后正常运行提升机跑完全程(由零位下放到井底),运行过程中速度显示为“000”,提升容器位置显示脉冲的累加数。
到达井底停车后长按“校检”键(长按10秒),此时提升容器位置显示设定的井深值,这时数据已采集完毕。
表二3、运行1、数据采集完成后,正常运行提升机到达零位,提升容器位置值“0000.0”。
2、途中如果速度超过设置的等速超速值,安全回路继电器动作,切断安全回路并语音提示“超速危险”,面板等速超速和安全回路指示灯亮。
3、途中如果深度指示器失效,安全回路继电器动作,切断安全回路并语音提示“深度指示失效危险”,面板深指失效和安全回路指示灯亮。
4、提升容器到达减速点时,减速指示灯亮,减速继电器动作并语音提示“减速请注意”。
5、提升容器到达井底后提升速度值显示为“00.0”,(停车时速度窗口显示提升勾数记录,开车时显示运行速度),提升容器位置值显示与井深值一致。
此时,打两点信号,提升容器上行,此时面板上行灯亮,并语音提示“上行请注意!”;当提升容器到达井口经过同步开关时,井深值清零。
6、提升容器过卷后,相应的提升方向指示灯闪烁,如果超过设定值,安全回路继电器动作并语音提示“过卷危险!”,面板上过卷和安全回路指示灯亮。

煤矿劳模先进事迹材料范文井架高耸,天轮旋转,矿车往来,马达轰鸣。
车间里弧光闪耀,工业区人群穿梭,一列列装满原煤的火车正风驰电掣般的驶向祖国的四面八方……远远望去,沸腾的矿山一派繁忙景象,这就是位于渭北黑腰带上的______矿务局王村煤矿。
近几年,这里出了个远近闻名的革新能手,他妙手回春,能让“瘫痪”的矿山机电设备快速运转,可以让深度“患疾”的老设备起死回生。
他负责检修的主、副井提升机,近年来的事故率几乎为“0”,大型机电设备误时率降到了最低限度。
他完成的百余项小革新、小发明,创直接经济效益200多万元。
他无偿为矿区职工、孤寡老人、工亡家属修理家用电器近千台(件),他就是___年被省委、省政府授予陕西省劳动模范、省技术状元、___年被全国总工会授予全国“五一”劳动奖章获得者,___年被中共陕西省委企业工委授予优秀共产党员。
今年又荣获全国劳动模范称号的______矿务局王村矿运行队机电维修工___。
“既然选择了矿山,我就把心交给了这片土地,铁下心学好技术,干好本职”___的成才之路,是一条自己铺筑的漫长艰辛的路,是一条只属于强者的崎岖的路,诚如斯言。
___1984年毕业于铜川煤技校,1989年调到投产不久的王村矿担当了机电维修工。
由于王村矿在当时属现代化矿井,很多机电设备,别说维修了,有些连见都未见过。
面对新设备密如蜘网般的电器设备线路图,___愕然了,恰在这时,矿上发生了一件令他终身难忘的事:一天,由于矿井副绞提升中途出了故障,十余名乘坐罐笼升井的职工被悬在了半空。
由于包括他在内的几名检修人员技艺不精,硬是让工友们在深邃黑暗的立井筒中,吊了4个多小时。
其实,当时故障,只不过是调速器中一个小小的电阻出了问题。
这件事对他触动很大,他顿时感到了一名机电维修工肩上的责任。
他想,仅靠自己从技工学校学到的那点知识,是肯定无法应对这些机电设备的。
于是,他暗下决心,自费订阅了《电子技术》、《电力传动》、电器维修》等十几种报刊杂志,买回来一大摞子大学电气专业教材,在别人逛街跳舞、看电视搓麻将的时候,他却苦读苦思,一头扎进了知识的海洋。
KY 煤矿提升机综合后备保护装置产品使用说明书(第一版)枣庄市万硕矿用设备制造有限公司2008年7月1、概述提升是矿井生产中的重要环节,矿井开采、井下所需物资的运送及人员的上、下井等都是通过提升机运行实现的。
目前,提升机的保护基本上是单线保护,一旦发生问题可能造成严重后果。
煤矿提升机综合后备保护装置,是在提升机原有的保护功能上新增加的一套综合后备计算机保护装置,使提升机电控系统中实现双线并行工作。
使提升机的保护形成了双线保护,且相互独立,使提升机的安全性能得到提高。
在使用煤矿提升机综合后备保护装置之前,请您仔细阅读说明书,以保证正确使准用并充分发挥其优越性能。
另外,本说明书为随机附件,务必请使用后妥善保管,以备今后对综合保护装置进行检修和维护时使用;由于产品的升级或优化,本说明书内容如有更改,恕不另行通知。
1.1 产品特点煤矿提升机综合后备保护装置,采用新型德国西门子公司(SIEMENS)可编程控制器及技术。
具有运算速度快、运行准确、抗干扰能力强、操作简单及性能可靠等优点。
其丰富的功能,完全满足您的需求。
1.2 主要用途及适用范围煤矿提升机综合后备保护装置(以下简称后备保护装置)适用于煤矿的提升机监测及控制。
1.3 工作条件(除井筒传感器外,后备保护装置在下列条件下应能正常工作)周围无瓦斯及无煤尘爆炸危险的场所;无腐蚀、破坏金属或绝缘的气体、蒸气或尘埃;大气压力: 80~160KP;供电电压: AC 127V,50Hz;环境温度: 0~40℃;环境湿度:≤95%,无凝结。
1.4 安全注意事项1) 严格按照说明书进行相关操作;2) 不可将易燃物放在主机附近:3) 后备保护装置不要安装在含有爆炸气体的环境中;4) 井筒安装传感器时,应严格按照《煤矿安全规程》操作;5) 安装主机时应可靠固定,配线作业必须由具有专业资格的人员进行;确认输入电源处于完全断开的情况下,才能进行接线工作。
2、结构特征与工作原理2.1 结构特征:后备保护装置由主机、位置速度传感器、井筒传感器、深度指示器失效传感器组成,技术参数见表1。
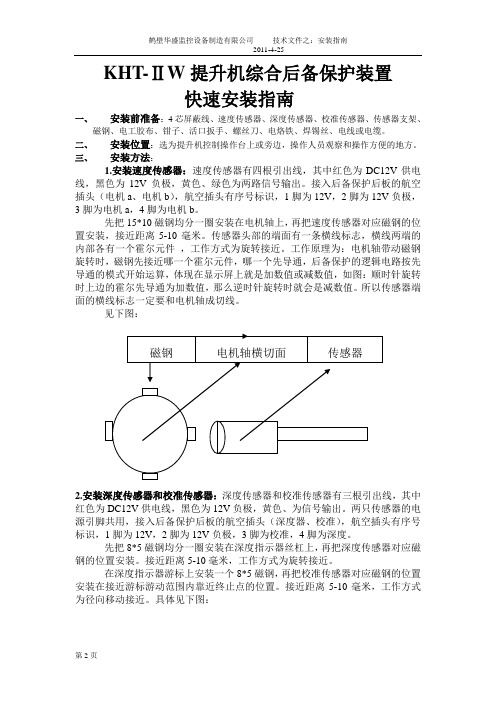
KHT-ⅡW提升机综合后备保护装置快速安装指南一、安装前准备:4芯屏蔽线、速度传感器、深度传感器、校准传感器、传感器支架、磁钢、电工胶布、钳子、活口扳手、螺丝刀、电烙铁、焊锡丝、电线或电缆。
二、安装位置:选为提升机控制操作台上或旁边,操作人员观察和操作方便的地方。
三、安装方法:1.安装速度传感器:速度传感器有四根引出线,其中红色为DC12V供电线,黑色为12V负极,黄色、绿色为两路信号输出。
接入后备保护后板的航空插头(电机a、电机b),航空插头有序号标识,1脚为12V,2脚为12V负极,3脚为电机a,4脚为电机b。
先把15*10磁钢均分一圈安装在电机轴上,再把速度传感器对应磁钢的位置安装,接近距离5-10毫米。
传感器头部的端面有一条横线标志,横线两端的内部各有一个霍尔元件,工作方式为旋转接近。
工作原理为:电机轴带动磁钢旋转时,磁钢先接近哪一个霍尔元件,哪一个先导通,后备保护的逻辑电路按先导通的模式开始运算,体现在显示屏上就是加数值或减数值,如图:顺时针旋转时上边的霍尔先导通为加数值,那么逆时针旋转时就会是减数值。
所以传感器端面的横线标志一定要和电机轴成切线。
见下图:磁钢电机轴横切面传感器2.安装深度传感器和校准传感器:深度传感器和校准传感器有三根引出线,其中红色为DC12V供电线,黑色为12V负极,黄色、为信号输出。
两只传感器的电源引脚共用,接入后备保护后板的航空插头(深度器、校准),航空插头有序号标识,1脚为12V,2脚为12V负极,3脚为校准,4脚为深度。
先把8*5磁钢均分一圈安装在深度指示器丝杠上,再把深度传感器对应磁钢的位置安装。
接近距离5-10毫米,工作方式为旋转接近。
在深度指示器游标上安装一个8*5磁钢,再把校准传感器对应磁钢的位置安装在接近游标游动范围内靠近终止点的位置。
接近距离5-10毫米,工作方式为径向移动接近。
具体见下图:校准磁钢校准传感四、联结控制引线:1. 电铃信号:从绞车房的127V—220V电铃线上取信号,和电铃并联后,接线至后备保护后板的“信号”端子。

什么是主保护,什么是后备保护推荐答案当回路发生故障时,回路上的保护将在瞬间发出信号断开回路的开断元件(如断路器),这个立即动作的保护就是主保护。
当主保护因为各种原因没有动作,在延时很短时间后(延时时间根据各回路的要求),另一个保护将启动并动作,将故障回路跳开。
这个保护就是后备保护。
当此回路很重要时,后备保护可以与主保护装设在同一个回路上,也就是一个回路有多套保护,以确保回路的安全运行。
但是一般都是将此回路的上一级保护作为本回路的后备保护:当配电盘中的一个回路故障、而主保护没有动作,那么配电盘上一级的电源断路器将延时后动作,这就是该回路的后备保护。
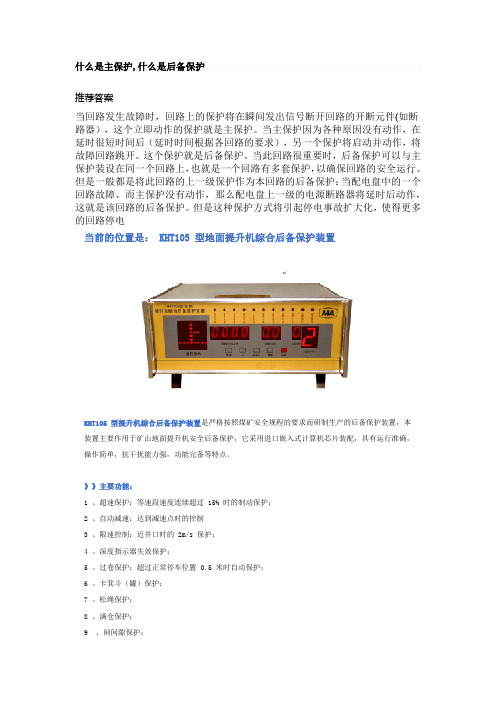
但是这种保护方式将引起停电事故扩大化,使得更多的回路停电当前的位置是: KHT105 型地面提升机综合后备保护装置KHT105 型提升机综合后备保护装置是严格按照煤矿安全规程的要求而研制生产的后备保护装置,本装置主要作用于矿山地面提升机安全后备保护,它采用进口嵌入式计算机芯片装配,具有运行准确,操作简单,抗干扰能力强,功能完备等特点。
》》主要功能:1 、超速保护:等速段速度连续超过 15% 时的制动保护;2 、自动减速:达到减速点时的控制3 、限速控制:近井口时的 2m/s 保护;4 、深度指示器失效保护;5 、过卷保护:超过正常停车位置 0.5 米时自动保护;6 、卡箕斗(罐)保护;7 、松绳保护;8 、满仓保护;9 、闸间隙保护;10 、方向(信号)闭锁;11 、位置(深度)显示;12 、瞬时速度显示;13 、当次信号显示;14 、上次信号显示;15 、绞车运行方向指示16 、声光显示;17 、自检功能;18 、复位功能;19 、清零功能;20 、紧急制动报警声解除功能;21 、制动时寄存显示当时的有关数值。
》》技术指标:1 、电源:AC220V ± 22V2 、信号电压: AC220V/127V3 、深度显示范围: 0 ~ 999.9m 精度± 0.1m4 、速度显示范围: 0 ~ 9.99m/s ,精度为± 0.01m/sKHT105型地面提升机综合后备保护装置安装示意图:。
提升机综合后备保护仪使用说明书一、概述提升机综合后备保护仪,根据《矿业安全规程》及《MT40—1995》的要求,利用现代微电脑技术设计的功能全,保护可靠的电子仪器,功能有:深度指示,速度显示,勾数累计,打点记忆,超速报警,等速段超速保护,自动减速,减速段保护,深指失效保护,卡箕斗保护,信号闭锁,闸间隙,满仓,松绳,过卷,故障记忆等保护。
当市电停电时,可自动记忆当前参数,从而提高了系统可靠性和监测精度,是矿井理想的综合后备装置。
二:主要技术指标1、工作电压:220V± 10泣频交流(如用127V订货声明)2、功率消耗:w 20W3、允许提升距离+3000米(要求大于3000米时订货声明)4、每个磁肿冲等效运行距离C 0.01分米v C v 0.2分米5、外型尺寸:400X 160X 320mm6、净重:6kg7、工作方式:连续8、容器位置检测精度0.1 米,最大显示值3276.8 米9、速度检测精度:0.1 米/秒,最大显示值19.9 米/秒10、失效保护:全程、连续11、使用条件:a环境温度:-10C—+40Cb相对湿度:v 80%c 无腐蚀性气体三、主要功能:1、提升深度显示功能,保护器能准确跟踪显示提升容器在井筒运行过程中离井口的时实位置供司机观察,显示精度为0.1 米。
2、提升速度显示功能:保护器显示提升容器在井筒运行过程中的时实速度供司机观察,显示精度为0.1 米。
3、深度指示器失效检测与保护功能:当深度指示器因故失效,例如传动系统断轴打牙、滚键等造成指针不能准确提示容器在井筒中的真实位置时微机将连续发出声光报警信号,当提升容器运行到2 米/ 秒限速点及以后发生深度指示器失效时,微机除发出声光报警信号外,还将发生控制指令,通过电控环节实施紧急制动(距离死区可小于3 米)。
4、超速保护功能:当容器实际运行速度超过最大速度的10%时微机发出声光报警信号,当提升容器运行速度超过最大速度的15%时微机除发出声光报警外还同时发出控制指令,通过电控回路实施安全制动。
5、减速段限速保护功能:容器在减速段实行保护,一旦超过规定运行速度范围,微机立即发出控制指令,通过电控回路实施安全制动。
6、后备减速功能:当容器运行到减速点时微机将立即发出减速指令,后备减速通过电控回路实施减速控制。
7、接近井口2 米/ 秒限速保护功能;当容器运行到 2 米/秒限速点及以后实际运行速度超过2米/ 秒时,微机随时发出控制指令,绞车立即安全制动。
8、后备过卷功能:当提升容器一但发生过卷,微机立即发出过卷指令,安全回路断电,绞车安全制动。
过卷保护距离的调整可根据现场情况予先设定过卷控制点,设定范围,0.1-25 米。
9、卡箕斗保护功能:箕斗顺利通过时信号显示,一旦箕斗被卡住微机发出卡箕斗信号,控制指令,绞车安全制动。
10、有双码校正功能:因提升过程中滚筒衬木磨损等原因造成的位置误差可以自动校正。
11、有松绳,满仓,闸间隙保护功能:一旦发生松绳或满仓时其信号送入微机,微机立即发出指令,声光报警,同时实施安全制动。
12、有传感元件运行状态自检功能,正常运行时每只传感元件接受磁信号后,都发出灯光指示。
13、打点记忆功能:打点信号直接显示,并记忆前三次打点信号,可以和提升下降开关连接实现方向闭锁。
14、钩数记忆功能:可方便计量产量和管理。
四、结构特点:1、本机采用国产标准机箱,前面板除“深度显示”,“速度显示”,“打点记忆”“钩数记忆”四个窗屏外,还设有20 只指示灯,以左至右依次指示超速10%,超速15%,后备减速,减速段限速 2 米/ 秒,后备过卷,失效指示,卡箕斗A 卡箕斗B松绳指示,满仓指示等。
另有“0K、“CLR、“SET、“上”、“下” 五只按键其作用如下,“0K键为安全制动后当故障排除后按“ 0K键,当发生上下过卷时,只有回到正常值后,按“0K键才可解除保护,设置参数后按“ 0K 键记忆参数并回到正常状态。
按住“ CLR键三秒以上提升钩数清零,同时按住“ CLR 、“上、“下键三秒以上深度指示清零。
按“ SET 键三秒进入参数设置状态。
2、后板设有各执行功能继电器输出接点端子排,传感信号引入插座,还有电源开关,保护投入开关等。
3、本机采用硬件和软件双套抗干扰措施,监测准确运行可靠。
4、按本机保护范围,当绞车出现运行故障时本机立即发出控制指令,通过电控回路实施控制,按一下“ 0K 键即可恢复正常运行状态。
五、工作原理:1、提升容器在井筒中的位置检测原理。
矿井提升主要是在主电机驱动下运行的,正常情况下容器在井筒中所处的位置与电动机的转数相对应,准确采集主电动机的转数(即磁脉冲数)即能换算出提升容器在井筒中相对应的位置,电机部位靠近减速机处高速轴上安装霍尔传感器(见图1),当电机转动时霍尔传感器将连续收到一系列磁脉冲信号,经微机计算并处理后在显示屏上将提升容器的运行时实位置显示出来。
2、提升容器运行速度检测原理微机根据事先存贮的提升有效总距离和总磁脉冲个数即可换算出提升容器运行过程中的实时速度并通过窗屏显示出来。
3、深度指示器失效检测原理在深度指示器杠一端的链条盘部位按装若干块直径约8—10m/m的磁块(磁块多少由现场要求的失效保护距离而定,一般和电机高速轴处安装磁铁个数一样)与磁块相对应的部位固定安装霍尔传感器、当丝杠转动时有一系列磁脉冲信号送入微机再与电机轴端送来的磁脉冲信号进行比较,在正常情况下两边发出信号是有严格比例的,一旦深度指示器失效,这个比例将被破坏,微1机立即发出声光报警信号和控制信号进行控制,这种失效检测在提升全过程中都是连接的。
基于上述原理,微机对超速、后备减速、减速段限速和 2 米/秒限速等功能的处理,也是灵活方便的。
以「探调试及注立那项挺论电机•拯TMK疋眩・■只fnawhEimtm・m t£«» L电机传酣的安聚电机传辭的安聚水Q图加图听示:g銀传够签衣利和憊体茨面何腺收取27mm左仏K.便用岛#进体.悠体用阳附f胶同崔化电机績哎桟速机轴上; c.破体个歌一叙为2—4个。
d.如衆传広签儿毗沙“a・j•左翎她和建钛转动方詞徴.记牧方向反时.A、B传S»U童堂换-EBU4传協器和深描戏1的檢饮对照.和离2—5・*果融体个ftWHl机轴1:的雜体个ttWH在井架上安装卡斗同步传感器,在机斗或罐笼上安装永久磁钢,开关与磁铁对应间隙40—70mm。
a、开关与磁钢对应处距停车位置应在零位b、两套开关对应的高度应一致4、参数设置按SET键进入参数设置状态,再按SET键可选择需要更改的参数项,按上下键可以更改原参数(持续按上下键时参数值变化会越来越快),如果不知道后备减速、减速1、减速2、减速3、2米限速位置时,可以使容器位于井口开车,使容器向下运行,当运行到减速1,减速为4米/秒的位置为减速2,速度为3米/秒的位置为减速3,速度为2/秒米的位置为2米限速。
小绞车有时不需要减速段保护,只要将保护值设大点即可,也可根据实际情况设定位置和速度保护值。
5、井口清零: 当参数设置完毕时要进行井口清零,容器在井口时同时按住CLR键和上下键(按顺序)3秒以上,深度指示窗口即清零。
这种功能还用于如下情况:A:由于某些未知的原因引起零位错误时。
B:参数表及含义由于深度变化或钢绳磨损,引起零位错误时。
6、参数表接法说明: “控制”:为保护控制输出常闭接点,当超速保护,减速段保护,后备过卷,两米限速,卡箕斗A,卡箕斗B,中任何一种保护时,此时“控制”将断开,控制绞车安全制动,一般串接与安全回路,同时相应的指示灯会亮,如故障解除,按“0K键即可恢复正常。
“松满”为松绳,满仓的保护输出常闭点,当松绳,满仓有任一保护时,此时松满断开,实行保护控制,一般串接与安全回路中。
“后备减速”对有后备减速功能的绞车时用,当绞车运行到某一点时发出自动减速信号(后备减速端闭合)绞车减速到预定速度后,后备减速端断开,平时为常开点。
“提升”、“下降”为方向闭锁控制端,平时为常开点,和打点信号配合,当打点信号为升时,“提升”端闭合,打点信号为降时“下降”端闭合。
为停时,则“提升”,“下降”端都断开。
以上触点可承受220V, 10A电流。
“打点”端子为打点信号输出端,可接一常开按钮。
打几下前面就显几下,并记忆三此打点信号,或在原打点信号线路中接一继电器,由原打点信号控制。
(注:不可将两根电源同时接入“打点”端子)。
“急停”端为急停信号输入端,当有急停信号输入时,“提升”,“下降”端均断开,绞车不能开动。
可接一带自锁的常开按钮。
“闸A”,“闸B', “满仓”,“松绳”,接入相应的行程开关常开点即可。
保护开关打到开位置时,所有保护都起作用。
打到关的位置时所有控制输出都不动作,仅发出声光报警,前面的相应指示灯亮。
7、调试说明:调试时有些功能对有些绞车无用,如卡斗A,卡斗B,打点记忆,后备减速,满仓等都为可选的。
调试主要就是计算一些参数,并输入主机内,调试步骤如下:1)脉冲系数(C)代表电机轴上每走一个脉冲钢丝绳走多少毫米,确定方法如下: 将绞车提升到井口位置,并将C先设定为100.0,使深度显示清零。
开车,到井底,此时记下深度显示的数据,如为:234.5就表示总脉冲数为2345,(小数点不记)。
用已知井深除以脉冲数,就得出脉冲系数C,(注意换算成毫米,即乘以1000.)也可以根据滚筒直径,减速比,及磁铁数计算:C=(滚筒直径+钢丝绳直径)X 3.1416十减速比十磁铁数(毫米)2)H井深:C确定后,主机从井口到井底所测定的值。
3)深指失效脉冲个数,指机械式深度指示器失效时保护,电机轴转动和深指上的链条或齿轮转动成严格比例关系,如果电机转而深指指示不动,说明深指失效,判断原理就是看比例是否正确,一般设为40,表示电机处转动40个磁脉冲深指处至少有一个脉冲。
4) L 零位修正,一般为零,表示清零后的初始值 5) A1上过卷,超过井口多少米时报警保护 6) A2下过卷,超过井底多少米时报警保护 7)DA 等速段报警,在井中正常运行时,如果超出正常速度的10%寸报警,但不保护停车,如正常车速为 3米/秒,DA=3<( 1+0.1 ) =3.3米。
8)DH 等速段保护,在井中正常运行时,如果超出正常速度的15%寸保护,如正 常车速为 3 米/ 秒,DH=3X ( 1+0.15) =3.45 米。
9) 减段设置:仅设置井口减速段参数,主机会自动计算井底相应的参数,如果 在设定的位置超过设定的速度就会保护动作。
10) 卡斗A,卡斗B,设置为零时,此功能无效(无此功能),设置为 1时有效。
井口鑼笼运行示盘图等速曲线卩p P滾度播示H榕体安装示盘图=Mita11笼电机•■个》制动Hl并口潰*代翦21电祐机1VSS 引it:埶空林头引线I捺为取廉止禺蓝为口为債号蠣檢为电那正根盘为U・tAffi号埼0米舛米限逢位子恋速I位予純速2位千"還3位后备减逮位井深H (米)。