平面机构的自由度之局部自由度和虚约束 第二课
- 格式:docx
- 大小:18.14 KB
- 文档页数:3


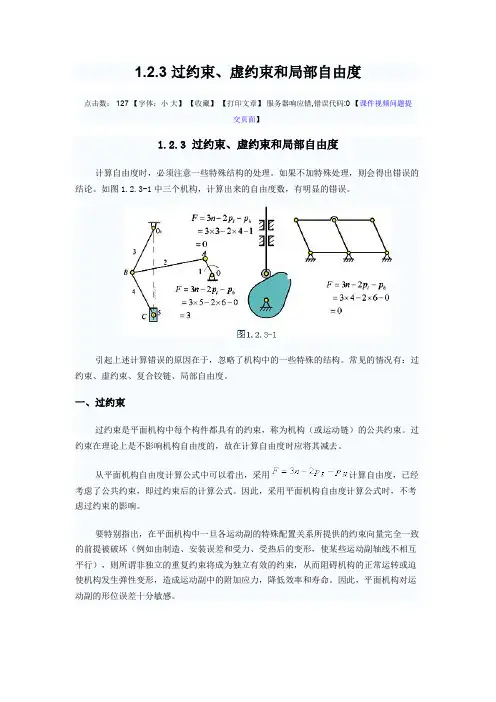
1.2.3 过约束、虚约束和局部自由度点击数: 127 【字体:小大】【收藏】【打印文章】服务器响应错,错误代码:0 【课件视频问题提交页面】1.2.3 过约束、虚约束和局部自由度计算自由度时,必须注意一些特殊结构的处理。
如果不加特殊处理,则会得出错误的结论。
如图1.2.3-1中三个机构,计算出来的自由度数,有明显的错误。
引起上述计算错误的原因在于,忽略了机构中的一些特殊的结构。
常见的情况有:过约束、虚约束、复合铰链、局部自由度。
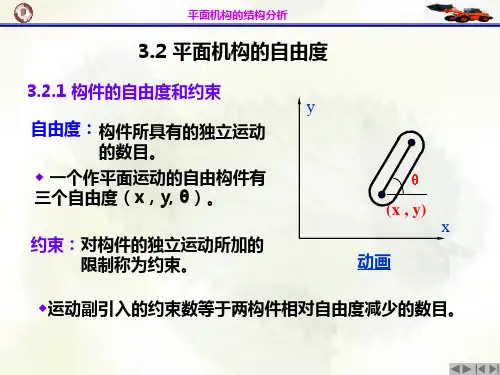
一、过约束过约束是平面机构中每个构件都具有的约束,称为机构(或运动链)的公共约束。
过约束在理论上是不影响机构自由度的,故在计算自由度时应将其减去。
从平面机构自由度计算公式中可以看出,采用计算自由度,已经考虑了公共约束,即过约束后的计算公式。
因此,采用平面机构自由度计算公式时,不考虑过约束的影响。
要特别指出,在平面机构中一旦各运动副的特殊配置关系所提供的约束向量完全一致的前提被破坏(例如由制造、安装误差和受力、受热后的变形,使某些运动副轴线不相互平行),则所谓非独立的重复约束将成为独立有效的约束,从而阻碍机构的正常运转或迫使机构发生弹性变形,造成运动副中的附加应力,降低效率和寿命。
因此,平面机构对运动副的形位误差十分敏感。
闭链机构,特别是平面闭链机构,一般都普遍存在过约束;开链机构由于末端构件不存在运动副的强制封闭,故不存在过约束。
二、虚约束在特殊的几何条件下,有些约束所起的限制作用是重复的,这种不起独立限制作用的约束称为虚约束。
例如图1.2.3-2中的平行四边形机构,为了增加连杆AB的强度,加入了一根MN杆,和两个转动副,并使AO1∥BO3∥MN。
由于MN杆加入前后,A、B点的轨迹没有发生任何变化,故实际上MN杆所引入的约束是重复的,不影响机构自由度。
但如果单纯按照平面机构的构件数和运动副数计算,则会得到错误的结论。
故在计算时应首先将带来虚约束的构件,连同引入的两个运动副一起去除掉,然后再进行机构自由度计算。


第二章 平面机构的结构分析2-1 绘制图示机构的运动简图。
2-3 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
解:(a) C 处为复合铰链。
7,n =p h =0,p l =10。
自由度 323721001W l h F n p p =--=⨯-⨯-=。
(b) B 处为局部自由度,应消除。
3n =, p h =2,p l =2自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(c) B 、D 处为局部自由度,应消除。
3n =, p h =2,p l =2。
自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(d) CH 或DG 、J 处为虚约束,B 处为局部自由度,应消除。
6n =,p h =1,p l =8。
自由度 32362811W l h F n p p =--=⨯-⨯-=。
(e) 由于采用对称结构,其中一边的双联齿轮构成虚约束,在连接的轴颈处,外壳与支架处的连接构成一个虚约束转动副,双联齿轮与外壳一边构成虚约束。
其中的一边为复合铰链。
其中4n =,p h =2,p l =4。
自由度 32342422W l h F n p p =--=⨯-⨯-=。
(f) 其中,8n =,p h =0,p l =11。
自由度 323821102W l h F n p p =--=⨯-⨯-=。
(g) ① 当未刹车时,6n =,p h =0,p l =8,刹车机构自由度为② 当闸瓦之一刹紧车轮时,5n =,p h =0,p l =7,刹车机构自由度为③ 当两个闸瓦同时刹紧车轮时,4n =,p h =0,p l =6,刹车机构自由度为2-3 判断图示机构是否有确定的运动,若否,提出修改方案。
分析 (a) 要分析其运动是否实现设计意图,就要计算机构自由度,不难求出该机构自由度为零,即机构不能动。
要想使该机构具有确定的运动,就要设法使其再增加一个自由度。