距离码光栅尺参数设定及调试说明
- 格式:doc
- 大小:1.12 MB
- 文档页数:3
802D sl 第二编码器为光栅尺的调试方法在802Dsl中进行第二编码器的设置,详细方法见简明调试手册光栅尺的型号为LB382C时,配置第二编码器的类型时选2112。
当选择2112时与编码器相关的参数值如下:p400[1]=2112 Enc type selection 40000 nm, 1 Vpp, A/B Rdistance-codedp404[1]=10C011H Encoder configuration effectivep404[1].0=1 Linear encoderp404[1].4=1 Track A/B sinusp404[1].14=1 Distance-coded zero markp404[1].15=1 Commutation with zero markp404[1].20=1 Voltage level 5 Vp407[1]= 40000 Linear encoder grid divisionp424[1]=80 Encoder, linear zero mark distance第二编码器的类型选择为自定义9999时,通过starter进行设置后,相关参数数值如下:p400[1]=9999 Enc type selection 40000 nm, 1 Vpp, A/B Rdistance-codedp404[1]=104011H Encoder configuration effectivep404[1].0=1 Linear encoderp404[1].4=1 Track A/B sinusp404[1].14=1 Distance-coded zero markp404[1].15=0 Commutation with zero markp404[1].20=1 Voltage level 5 Vp407[1]= 40000 Linear encoder grid divisionp424[1]=80 Encoder, linear zero mark distance与编码器相关的驱动参数如下:P424 直线尺零脉冲间距 Encoder, linear zero mark distanceP425 旋转光栅零脉冲间距 Encoder, rotary zero mark distanceP404.14 距离编码零脉冲 distance-coded zero marksP407 直线尺栅距 linear encoder grid divisionP408 旋转编码器脉冲数 rotory encoder pulse Nomuber1.轴数据的设定MD30230 $MA_ENC_INPUT_NR[0,AX1]=2MD31000 $MA_ENC_IS_LINEAR[0,AX1]=1MD31010 $MA_ENC_GRID_POINT_DIST[0,AX1]=0.04MD31040 $MA_ENC_IS_DIRECT[0,AX1]=1MD34000 $MA_REFP_CAM_IS_ACTIVE[AX1]=0MD34060 $MA_REFP_MAX_MARKER_DIST[0,AX1]=80MD34200 $MA_ENC_REFP_MODE[0,AX1]=3MD34300 $MA_ENC_REFP_MARKER_DIST[0,AX1]=80MD34310 $MA_ENC_MARKER_INC[0,AX1]=0.041.第一、第二编码器之间的切换将30230=1 31000=0 切换为电机编码器下在切换的过程中,如果报其他警的话,将所有与光栅尺相关的参数都改为默认即可解决。
802D SL距离码光栅尺的调试一.检查硬件连接检查24V电源是否准备好,检查DRIVE CLiQ电缆和光栅尺电缆是否已连接好。
二.光栅尺配置1.将电脑连接好,打开STARTER软件,选择[options]——[set PG/PC interface],在接口设定画面选择IP协议:“S7ONLINE[STEP7]—>网卡型号”2.新建一个项目,双击“Insert single drive unit”,做如下配置:Device type:SINAMICS IN802DDevice Version:2.4xAddress type:IPBus addr:169.254.11.223.项目创建后,STARTER和PC建立在线连接,将项目802D SL传到PC上,然后下线开始配置。
(注:在点下线图标后,出现一对话框,把“Load changes To PG”选择上)这样,在802D SL系统中的拓扑结构就已经下到PG上,可以开始测量系统的配置了。
4.(在做此步骤时,要确保最后一个伺服模块的第二编码器已经被打掉)选择要配置的伺服轴(比如:SERVO_04Z轴),单击前面的“+”,双击“Configuration”,单击“Configure DDS…”,选择“Continue”,直至编码器选择画面,激活第二编码器,选择自定义编码器,选择“Encoder data”,做如下配置:Encoder type:LinearMeasuring system:Incremental sine/cosineGrid type:40000ZM(根据光栅尺类型填写“栅格间距”)Zero marks Configuration:distant code zero markEquidistant Zero mark spacing:80mm(根据光栅尺类型填写“零标记间距”)点击OK,选择“Continue”完成配置。
在结束配置时,可能会出现报警页面,选择“Cancel”,“Yes”,直至报警取消。
光栅尺使用说明书第1章前言感谢您选择使用本产品。
本说明书详细介绍了光栅尺的使用方法和注意事项,请您仔细阅读。
第2章产品概述2.1产品简介光栅尺是一种精密测量工具,可用于测量线性位移和角度。
2.2主要特点1)高精度:采用先进的光学测量技术,具有高精度的测量能力。
2)便携性:体积小巧,重量轻,方便携带和使用。
3)易操作:采用直观的操作界面,简单易学。
4)可靠性:采用优质材料,具有较高的耐用性和可靠性。
第3章使用方法3.1准备工作1)将光栅尺连接到电源,确保电源正常工作。
2)根据需要调整测量范围和精度。
3)将光栅尺安装到需要测量的物体上,保持稳定。
3.2开始测量1)打开光栅尺的开关,待显示屏亮起后即可开始测量。
2)将光栅尺移动到需要测量的位置,并保持稳定。
3)读取显示屏上的数据,即可得到测量结果。
3.3结束测量1)在测量完成后,关闭光栅尺的开关。
2)断开光栅尺与电源的连接。
3)将光栅尺放置在干燥、清洁的地方,避免碰撞和摩擦。
第4章注意事项4.1使用环境1)光栅尺适用于室内环境使用,避免阳光直射和雨淋。
2)使用温度范围为0~40℃,湿度范围为10%~80%RH。
4.2使用方式1)使用前请先阅读本说明书,了解光栅尺的使用方法和注意事项。
2)操作时请保持手部干燥,避免划伤光栅尺表面。
3)避免将光栅尺与尖锐物体接触,以免损坏传感器部件。
4.3维护保养1)定期清洁光栅尺表面,可使用软布轻柔擦拭。
2)长时间不使用时,请将光栅尺放置在干燥、清洁的地方。
第5章常见问题解答Q:光栅尺的测量范围是多少?A: 光栅尺的标准测量范围为0~1000mm,但可根据需要进行调整。
Q:光栅尺的测量精度是多少?A: 光栅尺的标准测量精度为0.01mm,但可根据需要进行调整。
Q:光栅尺能测量角度吗?A:是的,光栅尺具有角度测量功能。
第6章售后服务以上即为光栅尺的使用说明书,希望能对您有所帮助。
祝您使用愉快!。
光栅尺调试增加第二测量回路及增加光栅尺功能1.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 2.机床数据MD30200=2N30200 $MA_NUM_ENCS[AX1]=2N30240 $MA_ENC_TYPE[1,AX1]=1N31000 $MA_ENC_IS_LINEAR[1,AX1]=1N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02N31040 $MA_ENC_IS_DIRECT[1,AX1]=1N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500如果为带距离编码的光栅尺:3.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 4.机床数据MD30200=2N30200 $MA_NUM_ENCS[AX1]=2N30240 $MA_ENC_TYPE[1,AX1]=1N31000 $MA_ENC_IS_LINEAR[1,AX1]=1N31040 $MA_ENC_IS_DIRECT[1,AX1]=1N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1MD34200 ENC_REFP_MODE=3N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.04 ; MD34310 ENC_MARKER_INC =0.04MD 34300 ENC_REFP_DIST=80N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=80MD34320 ENC_INVERS[1] ;=0 光栅尺与机床同方向MD34000 REFP_CAM_IS_ACTIVE =0绝对光栅尺:5.机床数据MD30200=2N30200 $MA_NUM_ENCS[AX1]=2N30240 $MA_ENC_TYPE[1,AX1]=4N31000 $MA_ENC_IS_LINEAR[1,AX1]=1N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02 型号来定N31040 $MA_ENC_IS_DIRECT[1,AX1]=1N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500MD34200 ENC_REFP_MODE=0MD34102 REF_SYNC-ENC=1MD1030=18H标定的步骤:和802D 一样第二测量回路生效第二测量回路生效光栅尺分辩率;两个零脉冲之间的差值:两个零脉冲之间的距离;找参考点的最大距离=1 光栅尺与机床反方向// 根据光栅尺的如果是光栅回零的话,请参考以下以下方法:如果你的光栅尺是带距离编码参考点标志的光栅尺的话(一般海德汉光栅尺后面带C标志的都有此功能),回参考点就不需要回零开关,参数设定如下:1、34200=3光栅尺使用类型2、34300[1]=20mm 直线光栅尺标准参考点标志栅格间距(LS486C为20mm)3、34060[1]=40返回参考点最大移动距离=2倍直线光栅尺标准参考点标志栅格间距4、34000=0不使用进给轴返回参考点凸轮,即不用返回参考点减速开关信号(DB31.DBX12.7)5、34090=XXX返回参考点偏移值6、34310[1]=0.020 光栅尺信号节距(LS486C 为0.020mm)希望对你有参考价值!2.进入“手动”方式,将坐标移动到一牛已知位的置设置,激活机床参数:按机床控制面板上的复位键,可激活的以上设定的参数7.按照返冋参考点的方向按方向阻无坐杯移动.但系统口动设定「卜列:屏幕上的显示位宙为设定的位置。
光栅尺使用说明书【原创实用版】目录1.光栅尺简介2.光栅尺的结构和工作原理3.光栅尺的使用方法4.光栅尺的维护与保养5.光栅尺的常见问题与解决方法6.结论正文一、光栅尺简介光栅尺,全称光栅距离测量仪,是一种高精度的测量工具。
它利用光栅的莫尔条纹原理来测量物体的长度、宽度、高度等尺寸,具有高精度、高稳定性、操作简便等优点。
在我国的机械制造、电子工业、精密仪器等领域得到了广泛应用。
二、光栅尺的结构和工作原理光栅尺主要由光栅尺本体、读数头和信号处理器等部分组成。
其中,光栅尺本体是测量长度、宽度、高度等尺寸的基础,由刻有线性光栅的玻璃尺或钢尺构成。
读数头是光栅尺与信号处理器之间的连接部分,负责接收光栅尺本体上的莫尔条纹信号并将其转换为数字信号。
信号处理器负责对读数头传输的数字信号进行处理,最终得到测量结果。
光栅尺的工作原理是利用光栅尺本体上的莫尔条纹与读数头内的光电探测器之间产生的干涉条纹进行测量。
当物体移动时,干涉条纹会发生相应的变化,通过信号处理器对这种变化进行处理,最终得到物体的尺寸。
三、光栅尺的使用方法1.在使用光栅尺之前,需要检查光栅尺的零位是否正确,并确保光栅尺的尺身、读数头和信号处理器连接正常。
2.使用时,将光栅尺放置在待测物体上,使物体与光栅尺尺身平行。
3.启动信号处理器,调整读数头的位置,使其与光栅尺尺身紧密接触。
4.移动物体或光栅尺,观察信号处理器上的显示数值,即可得到物体的尺寸。
四、光栅尺的维护与保养1.光栅尺使用过程中应避免与油污、水滴等污染物接触,以免影响测量精度。
2.定期对光栅尺进行校准,确保测量精度。
3.长期不使用时,需将光栅尺存放在干燥、通风、避免阳光直射的地方。
五、光栅尺的常见问题与解决方法1.测量数据不准确:可能是光栅尺零位不准确、光栅尺尺身或读数头损坏等原因,需进行检修或更换。
2.读数头无法正常工作:可能是连接线路松动、信号处理器故障等原因,需检查线路连接并修复信号处理器。
海德汉光栅尺调试光栅尺调试增加第二测量回路及增加光栅尺功能1.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 第二测量回路生效。
机床数据MD30200=2 2.N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=1 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02 N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1 N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500 如果为带距离编码的光栅尺:3.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 第二测量回路生效。
4.机床数据MD30200=2 N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=1 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1 MD34200 ENC_REFP_MODE=3 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.04 ;光栅尺分辩率MD34310 ENC_MARKER_INC =0.04 ;两个零脉冲之间的差值MD 34300 ENC_REFP_DIST=80 :两个零脉冲之间的距离N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=80 ;找参考点的最大距离MD34320 ENC_INVERS[1] ;=0 光栅尺与机床同方向=1 光栅尺与机床反方向MD34000 REFP_CAM_IS_ACTIVE =0 绝对光栅尺:5.机床数据MD30200=2 N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=4 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02 型号来定N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110$MA_ENC_FEEDBACK_POL[1,AX1]=-1N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500 MD34200 ENC_REFP_MODE=0 MD34102 REF_SYNC-ENC=1 MD1030=18H 标定的步骤:和802D 一样如果是光栅回零的话,请参考以下以下方法:如果你的光栅尺是带距离编码参考点标志的光栅尺的话(一般海德汉光栅尺后面带C 标志的都有此功能),回参考点就不需要回零开关,参数设定如下:1、34200=3 光栅尺使用类型2、34300[1]=20mm 直线光栅尺标准参考点标志栅格间距(LS486C 为20mm)3、34060[1]=40 返回参考点最大移动距离=2 倍直线光栅尺标准参考点标志栅格间距4、34000=0 不使用进给轴返回参考点凸轮,即不用返回参考点减速开关信号(DB31.DBX12.7)5、34090=XXX 返回参考点偏移值6、34310[1]=0.020 光栅尺信号节距(LS486C 为0.020mm)希望对你有参考价值!。
哈挺机床(上海)有限公司 Hardinge Machine (Shanghai) Co., Ltd 制定人:KKX 2008-12-04 版本:01EU 带距离码光栅尺零点调试1) 全闭环开通1. 光栅尺安装完毕,检查系统功能为选项是否开通,请检查诊断画面N1203#4 (0i-mc )N1139#2(0i-md)是否为“1”。
若为零,请与工程部联系,以开通此功能。
2 .将光栅尺检测功能开通将参数设为全闭环控制N1815#1 OPT 改为:“1”N1815#2 改为 1关机20秒后重启系统2) 各轴运行检测手轮方式移动各轴检查各轴是否平稳检查各轴急停是否有效3) 相关参数若N1820 为2,CMR=1时N1821 20000N1882 20020若N1820为20,CMR=10N1821 200000N1882 2002004) 设定参考点(以X 轴为例)1. 在“MDI ”方式将1883置“0”2. 关机20秒后系统重启3. 在“MDI ”方式,按一下“”OFFSET ”,切换到工件坐标系画面,将工件坐标系G53,G54清“0”4. 切换到回零方式,执行X 回零操作,工作台在回零方向连续移动3次后停止5. 将方式开关切换为手轮方式,然后将工作台移至机床参考点位置,记下此时的机械坐标值,如:-9998.4566. 切换工作方式到“MDI ”,拍下急停,将机械坐标输入参数N1883如:-9998456 注意去掉小数点,否则系统会报警“格式不对”注意,如果CMR=20时,放大10倍。
7. 关机20秒后系统重启8. 在回零方式,执行X 回零操作,工作台在回零方向连续移动3次后停止,查看此时机械坐标,看与到参考点的实际距离是否一致。
若一致,切换一下工作方式开关,再回到回零方式,执行回零,零点设置完成;若不一致,从第一步重新开始。
光栅尺使用说明书一、产品概述光栅尺是一种高精度的位置测量传感器,广泛应用于数控机床、机器人、自动化生产线等领域的位移测量。
本说明书将为您提供光栅尺的使用、安装、保养等方面的指导。
二、安装步骤1. 确认光栅尺的规格和尺寸是否符合您的设备需求。
2. 根据光栅尺的安装要求,准备合适的安装基座和安装孔位。
3. 将光栅尺安装到基座上,并使用适当的固定件(如螺丝、螺母等)将其固定。
4. 连接光栅尺的电缆到控制器或驱动器上,确保连接牢固。
5. 按照设备的电气规范进行电源连接。
6. 检查所有安装步骤是否正确,并进行初步测试以确保光栅尺正常工作。
三、操作说明1. 确保设备已正确启动并处于准备状态。
2. 通过控制器或驱动器发送位移测量指令给光栅尺。
3. 光栅尺将位移信号转换为电信号,并输出给控制器或驱动器。
4. 控制器或驱动器根据接收到的电信号进行相应的控制操作。
5. 定期检查光栅尺的工作状态,确保其正常工作。
四、注意事项1. 在安装和操作过程中,请遵守相关电气安全规范,确保电源和电缆连接正确可靠。
2. 请勿随意拆卸或修改光栅尺,以免造成损坏或精度损失。
3. 在使用过程中,避免对光栅尺施加过大的外力或振动,以免影响其测量精度。
4. 定期清洁光栅尺的测量面,保持清洁无尘,以保证测量精度。
5. 在使用过程中,如发现光栅尺工作异常或有故障提示,应及时停机检查并排除故障。
五、故障排除1. 检查电源和电缆连接是否正常,确保电源电压符合光栅尺的要求。
2. 检查光栅尺的安装是否牢固,如有松动请重新固定。
3. 检查控制器或驱动器的设置和配置是否正确,包括波特率、数据位等参数。
4. 如以上步骤均无问题,可能是光栅尺本身出现故障,建议联系专业维修人员进行检修或更换。
六、保养维护1. 定期检查光栅尺的测量面是否清洁无尘,如有需要可用适当的清洁剂进行清洁。
2. 检查光栅尺的固定件是否松动或磨损,如有需要请更换或加固。
3. 对于长期使用的光栅尺,建议定期进行精度校准和维护保养,以保证测量精度和使用寿命。
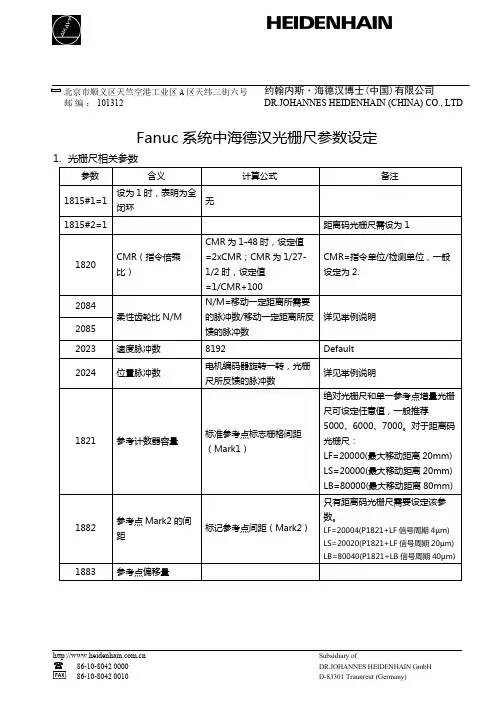
约翰内斯·海德汉博士(中国)有限公司DR.JOHANNES HEIDENHAIN (CHINA) CO., LTD北京市顺义区天竺空港工业区A 区天纬三街六号 邮编:101312Fanuc 系统中海德汉光栅尺参数设定1. 光栅尺相关参数约翰内斯·海德汉博士(中国)有限公司DR.JOHANNES HEIDENHAIN (CHINA) CO., LTD北京市顺义区天竺空港工业区A 区天纬三街六号 邮编:1013122. Example 1: 系统指令单位1µm,丝杠螺距为10mm ,减速比1/2, 光栅尺型号为LS177,TTLx5,标准栅距为20µm,5倍细分后信号周期为4µm,光栅尺只有一个参考点。
● CMR=指令单位(1µm)/检测单位(1µm)=1,P1820=2xCMR=2指令单位:CNC 发出一个指令脉冲时,机床所移动的距离。
检测单位:光栅尺可以检测机械位置的最小单位。
● 假设需要移动10mm ,系统需发送10mm/0.001=10 000 Pulse机床移动10mm ,光栅尺反馈10mm/0.004=2500 Pulse N/M=10 000/2500=4/1 P2084=4 ;P2085=1. ● 速度反馈脉冲数P2023=8192● 电机一转机床移动5mm ,由光栅尺反馈的脉冲数位5mm/0.004(光栅尺信号周期)=1250 Pulse P2024=1250● 参考计数器容量P1821为5000,6000.7000中的任意值. 3. Example 2:若还是同一坐标轴,换成LS177C ,TTLx5● 其他参数同上,只有参考点参数设定不同 ● P1821=20 000 ● P1882=20 0204. Example 3:同一坐标轴,光栅尺换成LB382C ,信号周期40µm。
● CMR=2● 假设需要移动10mm ,系统需发送10mm/0.001=10 000 Pulse机床移动10mm ,光栅尺反馈10mm/0.04=250 Pulse N/M=10 000/250=40/1 P2084=40 ;P2085=1.● 电机一转机床移动5mm ,由光栅尺反馈的脉冲数位5mm/0.04(光栅尺信号周期)=125 Pulse P2024=125 ● P1821=80 000 ● P1882=80 040。
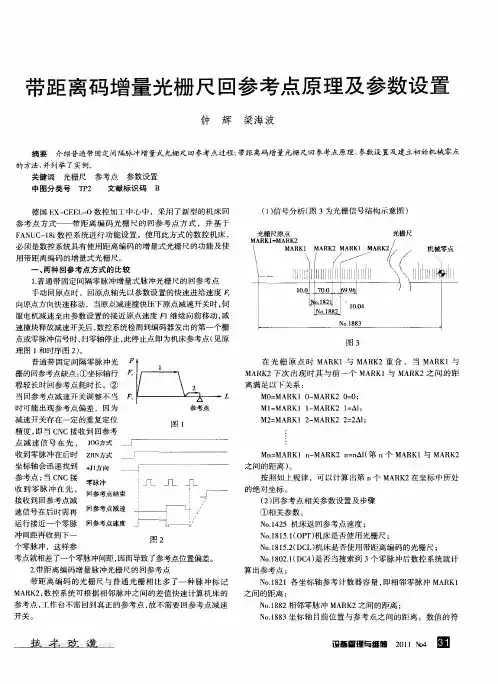
距离码光栅尺的调试一、原理(本节内容抄的,看过的请跳跃)带距离编码参考点标志的线性测量系统的原理是采用包括一个标准线性的栅格标志和一个与此相平行运行的另一个带距离编码参考点标志通道,每组两个参考点标志的距离是相同的,但两组之间两个相邻参考点标志的距离是可变的,每一段的距离加上一个固定的值,因此数控轴可以根据距离来确定其所处的绝对位置,如图下所示:(LS486C为例)例如从A点移动到C,中间经过B点,系统检测到10.02就知道轴现在在是哪一个参考点位置,同样从B点移动到D,中间经过C点,系统从C点到D点的距离是10.04就知道轴现在在是哪一个参考点位置,所以只要轴任意移动超过两个参考点距离 (20mm)就能得到机床的绝对位置. HEIDENHAIN公司的直线光栅尺后面带"C"的都有此功能,如"LF183C, LS486C,LB382C"等. 西班牙FAGOR公司的直线光栅尺中间带"O"的也有此功能,如"COV, COVP,FOP"等.二、调试相关参数:MD30200=2MD30240=2 (编码器类型:1.增量式;2.距离码;4.绝对值)MD31000=1 (0:编码器;1:光栅尺)MD31010=0.02 (光栅尺节点距离)MD31040=1 (直接测量系统)MD34200=3 (回零模式)MD34300=20 (标准参考点标志栅格间距)MD34060=40 (返参考点最大移动距离=2*栅格间距)MD34000=0 (使用凸轮)MD34040=1000 (返参考点速度)MD34310=0.02 (栅距)还包括MD34090(返参考点偏移值)和MD34320(返参考点极性)。
以及驱动数据:P407,P424,P426。
对大部分光栅尺,其栅距都是20um,通过驱动配置用以上数据可以完成调试。
三、案例用户现场使用的是意大利的GIVI Misure光栅尺,栅距20um。
光栅尺调试方案
操作步骤如下:
1、如上图接线;
2、X轴工作在半闭环模式;将STB14 = 0;
3、Z轴工作在全闭环模式,此时,将X轴光栅尺接在Z轴驱动单元上;
4、Z参数设置:
STB12 = 1
STB13 = 1
STB14 = 1
不要给Z轴驱动单元使能信号;
5、将系统参数中X轴轴参数中的电子齿轮比及轴每转脉冲数都改为X轴电机的值。
6、移动X轴;
观察X轴及Z轴驱动单元的DP-PFL DP-PFH;看两者的计数方向是否一致(同时增加或同时减少);
若不一致;将Z轴的PA10设置为512;保存断电;
7、重新上电,再次移动X轴;
此时,X轴及Z轴的DP-PFL DP-PFH计数方向应该一致;
8、先停下X轴,记下Z轴的DP-PFL DP-PFH值
F1 = DP-PFH * 10000 + DP-PFL;
将X轴运行一个丝杠导程;再次记下Z轴的DP-PFL DP-PFH值;
F2 = DP-PFH * 10000 + DP-PFL;
记下F3 = F2 – F1;
完成之后,将Z轴改回半闭环模式;
9、重新接线
将X轴光栅尺的反馈线缆接到X轴的XS6上;
修改X轴参数:
STB12 = 1
STB13 = 1
STB14 = 1
10、修改系统参数X轴的齿轮比及轴每转脉冲数。
轴每转脉冲数。
光栅尺使用说明书光栅尺使用说明书感谢您购买我们的光栅尺。
本使用说明书将为您提供一份完整、生动、有指导意义的操作指南,帮助您正确、高效地使用光栅尺。
1. 光栅尺简介光栅尺是一种测量仪器,主要用于测量线性位移和角度。
它由主体、滑块、刻度尺和读数头组成。
主体通常安装在固定的位置上,而滑块随着被测物体的位移而移动,刻度尺和读数头用来读取位移量。
2. 光栅尺的安装在安装光栅尺之前,请仔细阅读安装手册。
一般来说,您需要将光栅尺的主体安装在一个稳固的平台上,确保其与被测物体的相对位置恒定。
同时,根据实际需要,确保滑块能够自由移动,并且与被测物体的接触尽量减少误差。
安装完成后,务必检查各部件的紧固度和连接状态。
3. 光栅尺的使用在使用光栅尺之前,请确保您已经熟悉了光栅尺的工作原理和相关技术要点。
首先,确保光栅尺和被测物体之间没有异物或污垢,以免影响测量精度。
然后,通过调整滑块位置,使其保持与被测物体的接触,然后开始测量。
在测量过程中,要注意避免外力的干扰,并保持测量装置的稳定性。
同时,可以根据需要调整读数头和相关仪表的参数,以获取更准确的测量结果。
4. 光栅尺的维护光栅尺在使用过程中需要进行适当的维护,以保证其正常运行和延长使用寿命。
定期清洁光栅尺的表面和刻度尺,可以使用软布和清洁液擦拭,但请勿使用有机溶剂等易造成损伤的清洁剂。
同时,注意保护光栅尺的防尘罩和连接线,避免受到外界的物理损害。
若发现任何磨损或故障,请及时联系我们的售后服务人员。
5. 光栅尺的注意事项在使用光栅尺时,请注意以下几点:a. 避免光栅尺与尖锐物体接触,以免损坏测量装置。
b. 避免将光栅尺安装在易受冲击或振动的位置,以免影响测量精度。
c. 避免暴露在高温、高湿度或腐蚀性气体的环境中,以免损坏光栅尺。
d. 避免将光栅尺用于超出其额定范围的测量,以免损坏仪器或影响测量结果。
e. 注意操作人员的安全,避免直接触摸光栅尺的电气部件,以免触电危险。
希望以上使用说明对您能够正确、高效地使用光栅尺有所帮助。
内燃机与配件0引言数控机床安装光栅尺,可以不通过任何中间装置即可对机床位置进行直接测量。
当光栅尺直接安装在机床基面(平行于导轨)上并正常测量时,机床的实际位移被直接反馈到数控系统,这样由于机械热膨胀、丝杠螺距误差、反向间隙等机械问题引起的测量误差都是最小的。
1选型配置①该龙门高速机的M720数控系统硬件配置如下:1)数控系统FCA720P-4VS (M720CNC )1件2)显示屏DU140(10.4寸彩显)1件3)键盘单元KB047(字母全键盘)1件4)输入输出单元DX710(64DI/64DO )1件5)主轴驱动器MDS-D-SP-1601件6)伺服驱动器MDS-D-V1-3201件MDS-D-V2-160160W 1件7)主轴电机SJ-DL7.5/150-01T (S )1件8)伺服电机HF903S-A48(X )1件HF703S-A48(Y )1件HF703BS-A48(Z )1件9)信号转换模块MDS-B-HR-113件②该龙门高速机选配发格公司的光栅尺,具体配置如下:1)X 轴光栅:GOP 2640-5有效测量长度2640mm 1件2)Y 轴光栅:GOP 1740-5有效测量长度1740mm 1件3)Z 轴光栅:GOP 1040-5有效测量长度1040mm 1件以上光栅尺都是距离编码式,输出信号为正余弦1Vpp ,精度±5μ/m ,分辨率Up to 0.1μ。
该龙门的三轴行程为X =2500mm ,Y =1600mm ,Z =900mm ,选择光栅时,各轴都考虑140mm 的安全余量,避免机床超行程时损坏光栅。
同样在选择光栅时,需要考虑对应系统对光栅信号输出的要求。
2课题描述光栅尺直接安装在机床基面(平行于导轨)上并正常测量时,机床的实际位移被直接反馈到数控系统,这样由于机械热膨胀、丝杠螺距误差、反向间隙等机械问题引起的测量误差都是最小的。
可以不通过任何中间装置即可对机床位置进行直接测量。
光栅尺调试方法
1. 嘿,你知道吗,光栅尺调试第一步就是要做好清洁呀!就像你每天要洗脸让自己干干净净的一样。
把光栅尺和读数头清理得一尘不染,这样它们才能更好地配合工作呀!比如,如果上面有灰尘啥的,那不就像你眼睛进了沙子,能看得清才怪呢!
2. 然后呢,要仔细检查连接线路哦!这可不能马虎,就好比身体的血管,得保证畅通无阻啊!要是线松了或者断了,那还怎么调试,这不是瞎折腾嘛!你想想,要是电器插头没插好,能正常工作吗?
3. 接下来,调整读数头的位置可关键啦!就如同跳舞要站对位置一样重要。
读数头的位置不对,那数据肯定不准呀!比如说,你投篮的时候位置偏了,还能投进吗?
4. 对参数的设置也要格外上心呀!这可不是随随便便就能搞定的,得认真对待。
这就好像给机器设定一个精确的目标,你设得乱七八糟的,它能完成任务吗?你看,手机里的设置要是弄错了,得多麻烦。
5. 还有啊,在调试的时候一定要有耐心!就像拼图一样,得一块一块慢慢来。
着急可不行哦!你总不能指望一下子就拼好一幅超级难的拼图吧。
6. 最后,反复测试可不能少啊!这就好像考试前要多做练习题一样。
只有不断测试,才能确保光栅尺正常工作呀!你想想,不经过多次练习,能考好试吗?总之呀,光栅尺调试可不是一件容易的事,但只要按照这些方法认真去做,肯定能成功的!。
光栅尺数显表说明书1. 引言本说明书旨在介绍光栅尺数显表的性能、功能和使用方法,以帮助用户正确、高效地操作该设备。
请在使用前仔细阅读本说明书,并按照指导进行操作。
2. 设备概述光栅尺数显表是一种用于测量线性位移的仪器,它通过测量光栅尺上的刻度来确定被测物体的位置。
该设备具有以下特点: - 高精度:光栅尺数显表采用先进的传感技术和数字显示技术,具有高精度的测量能力。
- 易于安装:设备结构简单紧凑,可以方便地安装在各种机械设备上。
- 数字显示:通过数码管显示被测物体的位置值,直观清晰。
3. 技术参数以下是光栅尺数显表的主要技术参数: - 测量范围:0~1000mm - 分辨率:0.01mm - 精度:±0.02mm - 工作温度:-10℃~50℃ - 工作湿度:20%~80% - 供电电源:AC220V/50Hz4. 功能介绍4.1 数字显示光栅尺数显表采用数码管显示被测物体的位置值,可以实时、直观地观察测量结果。
4.2 零点设置在使用光栅尺数显表进行测量之前,需要进行零点设置。
具体操作方法如下: 1. 将光栅尺数显表安装在被测物体上。
2. 打开电源,待设备启动完成后,按下零点设置按钮。
3. 移动被测物体到零位位置,并松开零点设置按钮。
4. 数码管显示器将显示当前位置为零点。
4.3 单位切换光栅尺数显表支持多种单位切换,包括毫米(mm)、英寸(inch)等。
用户可以根据需要选择合适的单位进行测量。
4.4 数据存储光栅尺数显表具有数据存储功能,可以记录多次测量结果。
用户可以通过相应按钮查看历史记录,并进行数据分析和比较。
5. 使用方法以下是使用光栅尺数显表的基本操作步骤: 1. 将光栅尺安装在被测物体上,并确保安装牢固。
2. 打开电源,待设备启动完成后,按下零点设置按钮进行零点设置。
3. 将被测物体移动到需要测量的位置。
4. 数码管显示器将实时显示被测物体的位置值。
6. 注意事项在使用光栅尺数显表时,请注意以下事项: 1. 请勿将设备暴露在过高或过低的温度环境中,以免影响测量精度和设备寿命。
距离码光栅尺参数设定说明
(1)柔性齿轮比的设定
No.2084、No.2085的计算,对于使用模拟信号(1Vpp)输出的光栅尺,柔性齿轮比按照以下的计算方法:
目前贵厂在调的轧辊车,X轴使用的光栅尺型号为MOP-42,FAGOR光栅尺说明书如下:
X轴光栅尺的信号周期为20um,因此柔性齿轮比(N/M)=20/512/1=20/512=5/128
Z轴使用的光栅尺型号为LOP-64,FAGOR光栅尺说明书如下:
Z轴光栅尺的信号周期为40um,因此柔性齿轮比(N/M)=40/512/1=40/512=10/128
(2)位置脉冲数的计算
No.2024 电机每转动1周时,从分离式检测器反馈的脉冲数。
X轴采用丝杠传动,减速比为1/4,丝杠螺距为8mm,电机每转一圈,工作台移动2mm:位置脉冲数=2mm/(20um/512)=51200(>32767),因此采用No.2024和No.2185的乘积设
定位置脉冲数。
可进行如下的设定No.2024=25600 No.2185=2。
Z轴采用齿轮齿条传动,减速比为3249/416075,您提供的另一个参数为384.266mm,电机每转动一圈,工作台的移动距离为384.266*(3249/416075)约等于3mm,现在以3mm计算:
位置脉冲数=3mm/(40um/512)=38400(>32767),因此采用No.2024和No.2185的乘积设定位置脉冲数。
可进行如下的设定No.2024=19200 No.2185=2。
(3)参考计数器容量的计算
No.1821和No.1882的设定:
X轴使用的光栅尺型号为MOP-42,FAGOR光栅尺说明书如下:
No.1821=20000 No.1882=20020
Z轴使用的光栅尺型号为LOP-64,FAGOR光栅尺说明书如下:
No.1821=80000 No.1882=80040
(4)其他参数的设定
No.1815#1=1 使用分离式检测器
No.1815#2=1 使用带有绝对寻址标记的标尺(距离码光栅尺)。
2、距离码光栅尺回参考点的说明
距离码光栅尺回零的时候会走一下,停一下,共计3次,然后会把当前的坐标显示在机械坐标系上,第一次回零的时候,机械坐标值会非常大,此时,手动把伺服轴移动到零点,然后把此时的机械坐标值(非常大的数)手动输入到No.1883就可以了。
以上回零动作的实现必须有选项功能“附带绝对地址参照标记的直线尺”。