第六章 Simulink组件的基本使用方法
- 格式:ppt
- 大小:1.86 MB
- 文档页数:29



Simulink的使用Matlab的Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。
它使得Matlab的功能得到进一步的扩展,这种扩展表现在三个方面:(1)实现了可视化建模,在Windows环境下,用户可以通过简单的鼠标操作建立直观的系统模型,进行分析仿真。
(2)实现了多种环境间的文件共享与数据交换,甚至能够与硬件实现实时信息交换。
(3)把理论研究与工程实现有机地结合在一起。
Simulink支持连续、离散及混合的线性系统和非线性系统,并且支持多采样率系统。
其可视化建模体现在为用户提供了用方框图进行系统建模的图形接口.Simulink具有一个较为完整的模型库,包括源节点(Source)、阱节点(Sink)、线性环节(Linear)、非线性环节(Nonlinear)、连线与接口(Connections)和其他环节(Extra),用户还可以根据需要定制和创建自己的模块。
Simulink模型具有分层的等级结构,用户可以采用由上到下或从下到上的方式构建系统模型。
可以从全局的角度来考察系统,然后用鼠标双击其中的子系统模块,来查看下一级的内容,依此类推,可以看到系统模型的全部细节。
这种方式帮助用户洞察整个系统模型的体系结构及其各个部分的相互关系。
定义完一个模型后,用户可以通过Simulink的菜单或者Matlab 命令对它进行仿真。
可以在仿真的同时显示仿真结果,非常实用。
除此之外,还可以在用户改变参数之后迅速观察到系统中发生的变化。
Simulink的仿真结果可以输入到Matlab工作空间,进行事后处理或者可视化输出。
Simulink的实时工作间(Real-Time Workshop,以后简称RTW)直接从Simulink的系统框图自动生成C语言代码,这样一来,就允许在更广的计算机平台(包括实时硬件)上执行连续、时间离散及混合系统模型。
Simulink RTW的Ada扩展的作用是直接从Simulink的系统框图自动生成Ada浯言代码。
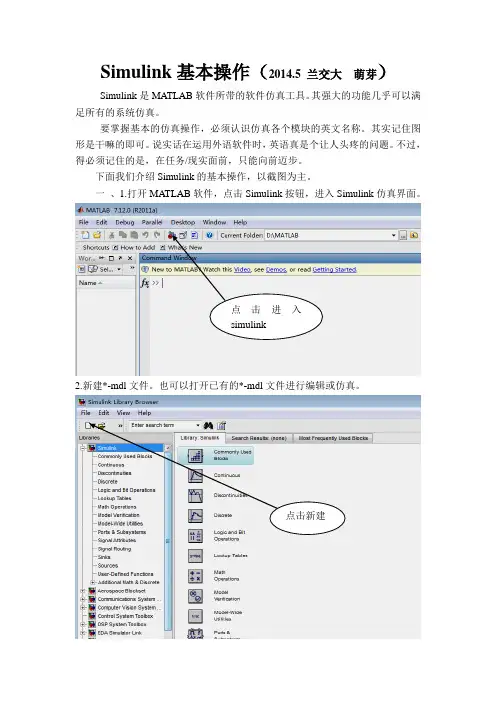
Simulink基本操作(2014.5 兰交大萌芽)Simulink是MATLAB软件所带的软件仿真工具。
其强大的功能几乎可以满足所有的系统仿真。
要掌握基本的仿真操作,必须认识仿真各个模块的英文名称。
其实记住图形是干嘛的即可。
说实话在运用外语软件时,英语真是个让人头疼的问题。
不过,得必须记住的是,在任务/现实面前,只能向前迈步。
下面我们介绍Simulink的基本操作,以截图为主。
一、1.打开MATLAB软件,点击Simulink按钮,进入Simulink仿真界面。
点击进入simulink2.新建*-mdl文件。
也可以打开已有的*-mdl文件进行编辑或仿真。
点击新建3.出现*-mdl界面。
现在进可以编辑机构框图了。
4.完成后,点击运行按钮,同时保存文件位置,注意文件地址要明确。
运行按钮Simulink给我们的基本模块结构很多,都在Simulink library browser窗口中。
其中有基本模块和专业模块。
常用基本模块。
二、下面,我们举例说明其简单的使用说明。
以下图为例。
该图为计算机控制系统的最少拍有纹波控制系统。
1.首先,添加各模块,同时修改其参数值,还可以边添加连线。
2.右键点击Add to …即可添加模块到*-mdl文件中。
点击右键点击我们可以改变其位置和大小。
3.再依次添加这两个。
发现在*-mdl文件中出现以下现象,不要着急!4.这时我们可以把他们移开(点击一个,拉开,再点击一个,拉开)同时放大合适的比例。
5.修改其属性的选中模块,双击打开。
比如Sum修改点击ok 得到6.双击Mux,在option中选择signals 点击ok,得连线鼠标放在箭头处,拉动,放入入口箭头处即可。
7.题目里出现两个相同模块的,可以进行复制、粘贴。
得到两个模块后在进行属性和参数的修改8.接着进行别的模块添加工作。
9.模块添加完成。
进行属性和参数设置,得到注;为了能让大家看的清楚些,我把布局缩小了,在自己实验仿真时,完全可以放开成大窗口,将模块放大,更清晰明了,不要小家子气。

实验三 Simulink 基本操作一、实验目的1.熟悉Simulink 集成环境,练习Simulink 模型文件基本操作。
2.熟悉Simulink 模块库。
3.掌握Simulink 集成环境建模,并学会Simulink 子封装。
二、实验原理Simulink 是MATLAB 的重要组成部分,是一个用来对动态系统进行建模、仿真和分析的软件包。
它支持线性和非线性系统连续和离散时间模型,或者是两者的混合。
它提供建立系统模型、选择仿真参数和数值算法、启动仿真程序对该系统进行仿真、设置不同的输出方式来观察仿真结果等功能。
启动simulink 之前必须首先运行MATLAB ,然后才能启动simulink 并建立系统模型。
启动simulink 过程:(1) 执行File →new ,在弹出的子菜单选Model ,进入Simulink 模型编辑窗口(2)双击Simulink 模型编辑窗口主工具栏的按 钮, 则打开Simulink 模型库浏览器(Simulink Library Browser)利用模型编辑窗口,可以通过鼠标的拖放操作创建一个模型。
三、实验内容1.在Simulink 环境建立系统 的仿真模型(见图1),其中subsystem 为子系统进行封装,其内部结构见图2。
图1 系统仿真模型⎩⎨⎧≤≥=25t ),t (u 1025t ),t (u 2)t (y图2 subsystem子系统封装系统参数设置如下:(1)模块参数Sine Wave模块:采用simulink默认参数设置,即单位幅值、单位频率的正弦信号。
Relational Operator模块:其参数设置为“>”Switch模块:设定Switch模块的Threshold值为0.5Clock模块:采用默认参数设置(2)系统仿真参数设置仿真开始时间设置为0,仿真停止时间设置为50,选择ode45算法2、根据单相半波整流电路(如图3所示),在模型窗口中建立主电路仿真模型,并进行仿真。
![[VIP专享]Simulink的使用](https://uimg.taocdn.com/877bd14d59eef8c75fbfb36f.webp)


simulink 用法
Simulink是MATLAB的一个附加组件,用于建模、模拟和分析动态系统。
以下是Simulink的一些基本用法:
1. 打开Simulink:在MATLAB命令窗口中输入“simulink”,然后按Enter键。
这将打开Simulink的库浏览器。
2. 创建新模型:在Simulink的库浏览器中,单击“Blank Model”,然后双击“New Model”。
这将打开一个新的Simulink模型窗口。
3. 添加模块:在Simulink模型窗口中,单击“Library Browser”按钮,然后浏览并选择所需的模块。
您可以通过单击模块并将其拖到模型窗口中来添加模块。
4. 连接模块:在模型窗口中,单击并拖动模块的端点以连接它们。
Simulink会自动为这些模块生成连接线。
5. 配置模块参数:双击您要配置的模块,然后选择“Parameters”选项卡。
您可以在这里设置模块的参数。
6. 运行模型:在模型窗口中,单击“Run”按钮以运行模型。
Simulink 将模拟模型的动态行为,并在“Scope”模块中显示结果。
7. 保存模型:在模型窗口中,单击“File”菜单,然后选择“Save”以保存您的模型。
这只是Simulink的一些基本用法。
Simulink还提供了许多其他功能和工具,例如信号查看器、仿真配置、子系统等。
要了解更多关于
Simulink的信息,请参考MATLAB的官方文档或教程。
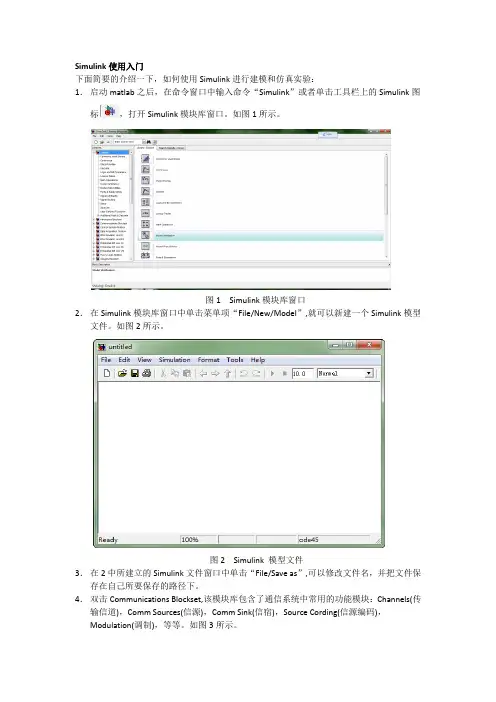
Simulink使用入门下面简要的介绍一下,如何使用Simulink进行建模和仿真实验:1.启动matlab之后,在命令窗口中输入命令“Simulink”或者单击工具栏上的Simulink图标,打开Simulink模块库窗口。
如图1所示。
图1 Simulink模块库窗口2.在Simulink模块库窗口中单击菜单项“File/New/Model”,就可以新建一个Simulink模型文件。
如图2所示。
图2 Simulink 模型文件3.在2中所建立的Simulink文件窗口中单击“File/Save as”,可以修改文件名,并把文件保存在自己所要保存的路径下。
4.双击Communications Blockset,该模块库包含了通信系统中常用的功能模块:Channels(传输信道),Comm Sources(信源),Comm Sink(信宿),Source Cording(信源编码),Modulation(调制),等等。
如图3所示。
图3 通信工具箱里的功能模块5.在Simulink基础库中找到自己需要的模块,选取该模块,直接拖动到新建模型窗口中的适当位置,或者选取该模块后,右击鼠标,“Add to…”加到所建模块窗口中。
图4中,把信号发生器放到了amn中。
图4 利用模块库建立仿真模型6.如果需要对模型模块进行参数设置和修改,只需选中模型文件中的相应模块,单击鼠标右键,选取相应的参数进行修改,或者双击鼠标左键,进行修改。
还可以在选中模块之后通过拖动鼠标来修改模块的位置、大小和形状。
7.通过快捷菜单的其它选项还可以对模型的颜色、旋转、字体、阴影等属性进行设置,也可以对模型进行接剪切、拷贝或删除。
8.模块外部的大于符号“>”分别表示信号的输入输出节点,为了连接两个模型的输入输出,可以将鼠标置于节点处,这时鼠标显示为十字,拖动鼠标到另一个模块的端口,然后释放鼠标的按钮,则形成了带箭头的连线,箭头的方向表示信号的流向。
Simulink模型库用法1. 简介Simulink是一款功能强大的图形化建模和仿真软件,它可以用于开发和调试各种复杂的动态系统模型。
Simulink模型库是Simulink提供的一个重要功能,它包含了大量可复用的模块、函数和工具箱,可以帮助用户快速构建和测试各种系统模型。
本文将详细介绍Simulink模型库的用法,包括如何使用、管理和扩展模型库,以及一些常用的技巧和注意事项。
2. 模型库的使用2.1 打开模型库要打开Simulink模型库,可以选择在Simulink界面上点击”Library Browser”按钮或者使用快捷键Ctrl+D。
打开后会出现一个浏览器窗口,其中包含了各种不同类型的模块和工具。
2.2 搜索模块在浏览器窗口中,可以通过搜索框来查找需要的模块。
输入关键词后,系统会自动过滤显示相关的结果。
点击结果即可将对应的模块添加到当前工作区。
2.3 添加/删除模块要将一个模块添加到当前工作区中,只需将其从浏览器窗口拖拽到工作区中的合适位置即可。
如果要删除一个模块,只需选中该模块并按下Delete键即可。
2.4 连接模块在Simulink中,模块之间可以通过信号线进行连接。
要连接两个模块,只需将鼠标移动到一个模块的输出端口上,然后按下鼠标左键并拖动到另一个模块的输入端口上释放即可。
系统会自动创建连接。
2.5 参数设置每个模块都有一些参数可以设置,用于调整其行为和性能。
要设置参数,只需双击相应的模块,在弹出的对话框中进行修改即可。
3. 模型库的管理3.1 创建新的模型库除了默认提供的Simulink模型库外,用户还可以创建自己的模型库来管理和组织自己编写的模块。
要创建新的模型库,可以在浏览器窗口中选择”File”->“New”->“Library”,然后选择保存路径和名称即可。
3.2 添加/删除/编辑子系统在Simulink中,子系统是一种特殊类型的组件,可以将多个相关联的模块封装成一个单独的单元。
实验四 Simulink基本模块的使用一、实验目的1、熟悉Simulink基本模块(信号发生器,数学模块,示波器)的使用。
2、掌握Simulink仿真参数的设置。
二、实验环境计算机,带Windwos操作系统三、实验原理1、使用Simulink启动MATLAB之后,在命令窗口中输入命令“Simulink”或单击MATLAB工具栏上的S imulink图标,打开Simulink 模块库窗口。
在Simulink模块库窗口中单击菜单项“File | Ne w | Mode l”,就可以新建一个Simulink 模型文件。
利用鼠标单击Simulink基础库中的子库,选取所需模块,将它拖动到新建模型窗口中的适当位置,如果需要对模型模块进行参数设置和修改,只需选中模型文件中的相应模块,单击鼠标右键,弹出快捷菜单,从中选取相应参数进行修改。
2、MA TLAB命令窗口中运行Simulink。
若参数设置为变量,变量可先在MA TLAB命令窗口中进行定义,并使用open,sim等命令直接运行信号。
然后在命令行提示符下输入>> a=1;b=1;open('s01.mdl');sim('s01.mdl');可得到同样的结果。
实验五构建SIMULINK子系统和模块的封装一、实验目的1、熟悉构建Simulink子系统。
2、学习自建模快的封装,帮助文档的编写。
3、掌握MATLAB命令窗口中运行Simulink。
二、实验环境计算机,带Windwos操作系统三、实验原理1、MA TLAB命令窗口中运行Simulink。
启动MATLAB之后,在命令窗口中输入命令“Simulink”或单击MATLAB工具栏上的S imulink图标,打开Simulink 模块库窗口。
在Simulink模块库窗口中单击菜单项“File | Ne w | Model”,就可以新建一个Simulink 模型文件。
Simulink使用基本Simulink是一种功能强大的图形化建模和仿真环境,用于分析和设计控制系统。
它是MATLAB的一个扩展工具箱,提供了一种直观和可视化的方法来创建和模拟动态系统模型。
在本文中,我们将介绍Simulink的基本使用方法。
在Simulink中,模型由一个个模块组成,每个模块代表系统的一个部分,例如传感器、执行器、控制器等。
这些模块通过线缆相互连接,以传递信号和数据。
要添加模块到模型中,我们可以在库浏览器中选择合适的模块,然后将其拖动到模型窗口中。
我们还可以使用快捷键B打开库浏览器,并通过栏来快速找到需要的模块。
一旦添加了模块,我们可以使用鼠标点击模块并拖动来改变连接线的位置。
要连接两个模块,只需将鼠标从一个模块上的端口位置拖动到另一个模块上的端口位置。
另外,我们还可以使用连接线工具栏上的线条样式来自定义连接线的样式,例如线的颜色、宽度等。
在进行仿真之前,我们需要设置模型的参数。
这包括设置仿真时间、步长和求解器等。
可以在模型窗口的工具栏上找到仿真按钮,点击后将启动仿真过程。
Simulink将按照设定的时间和步长,以及模型中各模块的逻辑,模拟系统的动态行为,并生成仿真结果。
仿真结果可以在仿真数据视图中查看和分析,包括系统的输入、输出、状态变量等。
除了基本的建模和仿真功能,Simulink还提供了许多高级功能和工具,用于系统控制、优化、验证等。
例如,我们可以使用状态流程图(Stateflow)来建模系统的离散事件行为,使用原型环境(Simscape)来建模物理系统,使用代码生成工具箱来生成嵌入式代码等。
Simulink还支持与MATLAB的混合编程,可以通过MATLAB脚本和函数来调用Simulink 模型,并在Simulink模型中使用MATLAB函数。
总结起来,Simulink是一个强大的图形化建模和仿真环境,适用于各种控制系统的分析和设计。
它提供了直观和可视化的方法来创建和模拟系统模型,并提供了丰富的工具和功能来支持系统开发的各个方面。
simulink基本模块的使用Simulink是一种强大的仿真和建模工具,常用于开发控制系统、信号处理和通信系统等。
本文将一步一步介绍Simulink的基本模块的使用,并讨论它们在不同领域中的应用。
一、Simulink基础知识在开始介绍基本模块之前,我们需要了解Simulink的一些基础知识。
Simulink是MATLAB软件的一个附加模块,用于建立模型以及执行仿真。
Simulink模型是由各种模块组成的,这些模块通过连线连接在一起,形成一个图形化的仿真模型。
它使用图形化界面,使用户能够直观地构建和修改模型。
二、Simulink基本模块1. 恒定值(constant)模块:恒定值模块用于生成恒定的信号,其输出值不会改变。
在模型中,我们可以通过恒定值模块设置输入信号的初始值、幅值以及一些其他属性。
该模块常用于生成常数信号,如直流电压或恒定的参考信号。
2. 脉冲(gain)模块:脉冲模块将输入信号的幅值乘以一个常数增益,然后输出结果。
通过改变增益系数,可以调整输出信号的幅值。
该模块常用于放大或缩小信号的幅值。
3. 积分器(integrator)模块:积分器模块对输入信号进行积分,并输出积分值。
积分器模块用于对信号进行数值积分操作,可用于控制系统中的积分环节,如PID控制器中的积分环节。
4. 微分器(derivative)模块:微分器模块对输入信号进行微分计算,并输出结果。
微分器模块适用于需要对信号进行微分操作的场景,如滤波器设计和导数控制器。
5. 比例积分微分(PID)控制器模块:PID控制器模块是Simulink中非常重要的一个模块,它结合了前面介绍的比例、积分和微分模块,实现了闭环控制。
PID控制器模块根据输入信号和误差信号生成控制信号,以实现期望输出。
该模块在自动控制系统中应用广泛。
6. 转换器(Switch)模块:转换器模块根据输入信号的值和条件判断,选择输出信号的路径。
该模块可以用于实现逻辑判断,选择不同的信号传递路径。
simulink 的用法
Simulink是一种图形化建模和仿真环境,用于设计、建模和仿真动态系统。
它是MATLAB软件的一部分,提供了一种直观的方法来构建和模拟各种系统,包括控制系统、通信系统、图像处理系统等。
Simulink的用法包括以下几个步骤:
1.打开Simulink:使用MATLAB软件打开Simulink工具包,或者直接在MATLAB命令窗口中输入"simulink"打开。
2.创建模型:在Simulink界面上使用不同的模块和线段,构建系统模型。
模块可以代表各种组件,如传感器、控制器、执行器等,线段则表示信号和数据流。
3.连接模块:使用适当的线段连接不同的模块,建立模型中各个组件之间的数据流和控制逻辑。
4.参数设置:对模型中的各个模块进行参数设置,以确保其行为与实际系统相符。
5.仿真运行:运行模型进行仿真,观察系统的动态行为和输出结果。
可以通过修改模型参数、调整模型结构来进一步优化和改进系统设计。
除了以上基本用法,Simulink还提供了许多高级功能,如模型验证、优化设计、代码生成等。
模型验证功能可以检测和解决模型中的错误和问题。
优化设计功能可以通过自动搜索和调整模型参数,实现系统性能的最优化。
代码生成功能可以将Simulink模型转换为C代码或其他可执行文件,以便在嵌入式系统中进行实时部署。
总的来说,Simulink提供了一种直观的图形化建模方法,将系统设计过程可视化,使得系统建模和仿真更加简单和高效。