主从式机器人的系统控制策略
- 格式:doc
- 大小:15.00 KB
- 文档页数:3
智能机器人系统的控制策略与路径规划技巧智能机器人系统的控制策略与路径规划技巧是实现机器人自主运动和智能决策的关键。
随着科技的不断发展,智能机器人系统在各行各业的应用越来越广泛,因此控制策略和路径规划技巧的优化显得尤为重要。
本文将探讨一些常见的控制策略和路径规划技巧,并分析其优缺点。
一、控制策略1. 解耦控制策略解耦控制策略是指将机器人的不同自由度分开进行控制,以达到提高运动效果和增强控制精度的目的。
一种常见的解耦控制策略是基于PID(比例、积分、微分)控制的方法。
PID控制器根据目标位置和当前位置之间的差异进行调整,通过不断修正机器人的位置和姿态,实现精确控制。
2. 协调控制策略协调控制策略是指将机器人的多个自由度进行协同控制,以实现复杂任务的完成。
一种常见的协调控制策略是基于反馈控制的方法。
通过传感器获取环境信息和机器人状态,将其作为反馈信号,并根据特定的控制算法进行实时调整,从而使机器人能够适应复杂的环境和任务需求。
3. 强化学习控制策略强化学习控制策略是近年来兴起的一种基于智能算法的控制方法。
该方法通过让机器人与环境进行交互,根据不同动作的结果进行反馈优化,从而使机器人能够逐步学习并提高自己的控制能力。
强化学习控制策略在复杂任务和动态环境下表现出色,但也存在训练时间长、对初始状态敏感等问题。
二、路径规划技巧1. 规划算法选择路径规划是指在给定起点和终点的情况下,确定机器人在空间中的具体路径。
常见的路径规划算法包括A*算法、D*算法和遗传算法等。
在选择路径规划算法时,需要根据具体的任务需求和环境条件进行权衡。
如A*算法适用于静态环境下的最短路径规划,而D*算法适用于动态环境下的在线路径规划。
2. 环境建模和感知在路径规划过程中,准确的环境建模和感知是关键。
机器人需要通过传感器获取周围环境的信息,如障碍物的位置、形状和大小等。
然后将这些信息以合适的方式表示出来,建立环境地图。
基于环境地图,机器人可以进行路径规划,并避开障碍物,安全到达目标位置。
机器人的控制系统设计机器人作为现代工业生产和科研的重要工具,其控制系统的设计和优化,对其性能和效能具有重要影响。
本文将探讨机器人的控制系统设计的关键要素和原则,通过合理的设计来提高机器人的工作效率和性能。
1. 概述机器人的控制系统是指对机器人进行控制和指挥的软件和硬件系统。
它由多个子系统组成,包括传感器、执行器、中央处理器和通信模块等。
这些子系统共同工作,使机器人能够感知环境、执行任务并与外部进行通信。
2. 控制系统设计的原则(1)可靠性和鲁棒性:控制系统应具备良好的可靠性和鲁棒性,能够在复杂和恶劣的环境条件下正常工作,并能适应各种场景需求的变化。
(2)实时性:机器人的控制系统需要具备快速的响应能力,能够实时感知环境变化并做出相应的反应,确保机器人的动作准确性和安全性。
(3)可扩展性和灵活性:控制系统应具备良好的可扩展性和灵活性,能够适应不同类型的机器人和任务需求,满足未来发展和扩展的需要。
3. 控制系统的组成部分(1)传感器系统:机器人的传感器系统用于感知环境信息,包括声音、图像、力量等。
常见的传感器包括摄像头、激光扫描仪、力传感器等。
(2)执行器系统:执行器系统用于执行机器人的动作,包括驱动电机、液压系统等。
执行器系统需要具备高精度和高效率,以确保机器人能够准确地完成任务。
(3)中央处理器:中央处理器是控制系统的核心,负责处理传感器数据、决策和控制机器人的运动。
中央处理器需要具备较高的计算能力和算法实现能力。
(4)通信模块:通信模块用于机器人与外部环境进行通信,包括无线通信和有线通信等。
通信模块的设计需要考虑数据传输的可靠性和安全性。
4. 控制系统的设计方法(1)模块化设计:控制系统的设计应该采用模块化的方式,将功能分解为多个模块,实现模块间的相互独立和可复用。
这种设计方法有助于提高系统的可维护性和扩展性。
(2)闭环控制:闭环控制是指控制系统能够根据反馈信息对机器人的状态进行调整和修正。
通过采集传感器数据,并与预设目标进行比较,控制系统可以实现精确的控制和调节。
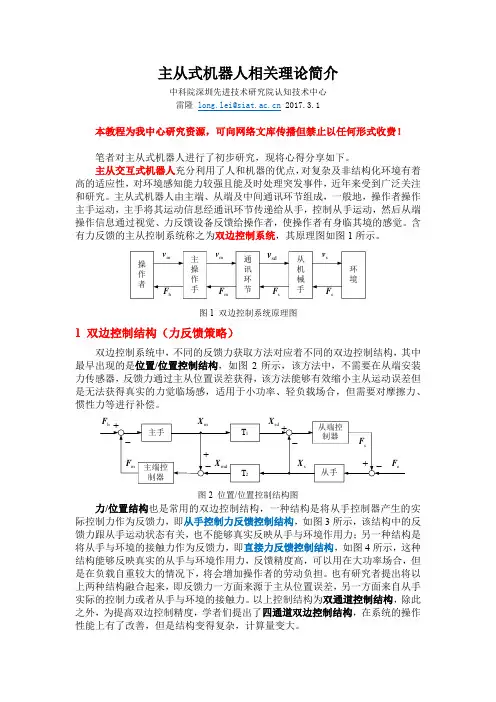

微创手术机器人Mciro Hand A主从控制策略研究0 引言微创手术是利用细长的手术工具通过病人体表切口探入体内进行手术操作的。
与传统开口手术相比,它可以减少手术对病人造成的创伤,缩短恢复时间。
另一方面,它也为医生操作带来了诸多困难,如:灵活性降低,工具的自由度被约束为4 个(不含开合);由于切口的限制,操作呈现杠杆效应;医生通过二维显示器获得手术场景的信息,缺乏深度方向上的感觉。
微创手术的这些缺点,使得其仅在相对简单的手术中得到应用[1]。
微创手术操作示意图所示。
微创手术的优势及其局限性,使得医生期望获得辅助设备以方便实施并能够在更多领域中开展这类手术[2]。
机器人技术的引入可以: a)增加工具的自由度数;b)发挥机器人操作稳定、定位准确的优势; c)使医生在三维图像下进行手术操作,且能够克服眼手不协调的缺点[3]; d)机器人辅助手术还具有远程操作的潜力[4]。
近年来,多种形式的微创机器人样机相继开发出来,包括利用自然腔道进行操作的微型机器人 [5,6],直接安装于病人身体之上的小型机器人[7,8],安装于手术床上的机器人 [9],布置于地面的体积较大的机器人 [10,11]等。
其中,由Intuitive Surgical. Inc.开发的da Vinci 机器人系统[11]及由Computer Motion 公司开发的Zeus 机器人系统[12],均通过了美国FDA 认证。
文献[13]总结了两者的特点及性能比较。
两公司合并后,Zeus 机器人系统不再生产[14]。
然而,已获得推广的机器人也存在相关问题,如:技术垄断、价格昂贵、所提供的手术工具并不能满足不同区域的病人的需求等。
尽管如此,机器人技术对手术操作带来的变革仍然被认为与CT、MRI 等图像技术对医疗诊断带来的变革等同[15]。
针对这种情况,我们自主研发了新型的微创手术机器人“Micro Hand A”系统。
本文以“Micro Hand A”为研究对象,建立了微创机器人系统的主从运动控制策略,包括:运动一致性控制,比例控制及增量式控制。

机器人的控制系统1. 引言机器人的控制系统是指对机器人进行实时控制和指导的软硬件系统。
它是机器人技术中的重要组成部分,负责控制机器人的运动、感知和决策。
机器人的控制系统需要具备高效、准确和可靠的特点,以实现机器人在不同环境和任务下的自主、智能运行。
本文将介绍机器人的控制系统的基本原理和主要功能。
2. 控制系统的基本原理机器人的控制系统通常采用分层控制结构,包括感知层、决策层和执行层。
感知层负责采集机器人周围环境的信息,决策层负责根据感知数据制定运动策略和任务计划,执行层负责控制机器人的运动和动作执行。
控制系统的基本原理如下:2.1 感知层感知层的主要任务是通过传感器采集机器人周围环境的信息。
常用的传感器包括摄像头、激光雷达、红外传感器等。
感知层通过感知和识别环境中的物体、障碍和目标,提供给决策层进行处理。
2.2 决策层决策层的主要任务是根据感知数据制定运动策略和任务计划。
决策层利用感知数据进行环境分析和目标识别,然后根据预先设定的算法和规则进行决策。
决策层可以根据情况调整机器人的运动策略和行为。
2.3 执行层执行层的主要任务是根据决策层的指令控制机器人的运动和动作执行。
执行层通过控制机器人的关节和执行器,实现机器人的运动、抓取和操作等动作。
执行层需要根据任务需求实时调整机器人的运动参数,保证机器人能够完成所要执行的任务。
3. 控制系统的主要功能机器人的控制系统具有多种功能,包括自主导航、路径规划、避障和交互等。
以下将介绍控制系统的主要功能:3.1 自主导航自主导航是控制系统的基本功能之一,机器人需要通过感知环境和决策运动策略,在未知环境中实现自主导航。
自主导航需要进行环境建模、路径规划和运动控制等步骤,以实现机器人的安全、高效移动。
3.2 路径规划路径规划是指根据机器人的起点、终点和环境信息,确定机器人的移动路径。
路径规划需要考虑避障、优化路径和实时调整等因素,以确保机器人能够按照预定路线安全、高效地移动。
机器人控制系统一、工业机器人控制系统应具有的特点工业机器人控制系统的主要任务是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等项。
其中有些项目的控制是非常复杂的,这就决定了工业机器人的控制系统应具有以下特点:(1)工业机器人的控制与其机构运动学和动力学有着密不可分的关系,因而要使工业机器人的臂、腕及末端执行器等部位在空间具有准确无误的位姿,就必须在不同的坐标系中描述它们,并且随着基准坐标系的不同而要做适当的坐标变换,同时要经常求解运动学和动力学问题。
(2)描述工业机器人状态和运动的数学模型是一个非线性模型,随着工业机器人的运动及环境而改变。
又因为工业机器人往往具有多个自由度,所以引起其运动变化的变量不止个,而且各个变量之间般都存在耦合问题。
这就使得工业机器人的控制系统不仅是一个非线性系统,而且是一个多变量系统。
(3)对工业机器人的任一位姿都可以通过不同的方式和路径达到,因而工业机器人的控制系统还必须解决优化的问题。
二、对机器人控制系统的一般要求机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下:•记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。
•示教功能:离线编程,在线示教,间接示教。
在线示教包括示教盒和导引示教两种。
•与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。
•坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。
•人机接口:示教盒、操作面板、显示屏。
•传感器接口:位置检测、视觉、触觉、力觉等。
•位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。
•故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。
三、机器人控制系统的组成(图1)(1)控制计算机控制系统的调度指挥机构。
一般为微型机、微处理器有32位、64位等,如奔腾系列CPU以及其他类型CPU。
主从控制系统原理-回复标题:主从控制系统原理详解主从控制系统是一种常见的分布式控制结构,广泛应用于工业自动化、机器人技术、网络通信等领域。
其基本原理是通过一个主控制器和多个从控制器之间的信息交互和协调,实现对系统整体的控制和管理。
以下我们将详细解析主从控制系统的原理,包括其结构、工作流程、优势以及应用。
一、主从控制系统的结构主从控制系统主要由两部分构成:主控制器和从控制器。
1. 主控制器:主控制器是系统的中心节点,负责整个系统的协调和管理。
它接收来自上层系统的指令,根据这些指令制定控制策略,并将这些策略分发给各个从控制器。
2. 从控制器:从控制器是系统的执行节点,负责执行主控制器下发的控制指令。
每个从控制器都与主控制器保持通信,接收并执行主控制器的指令,同时将自身的状态信息反馈给主控制器。
二、主从控制系统的运行流程主从控制系统的运行主要包括以下几个步骤:1. 上层系统向主控制器发送控制指令。
2. 主控制器接收到指令后,进行解析和处理,制定出相应的控制策略。
3. 主控制器将控制策略分发给各个从控制器。
4. 从控制器接收到控制策略后,开始执行相应的操作,并将执行结果和自身状态信息反馈给主控制器。
5. 主控制器收集各个从控制器的反馈信息,进行分析和处理,判断是否需要调整控制策略。
6. 如果需要调整,主控制器则重新制定控制策略并下发给从控制器;如果不需要,系统则继续按照当前策略运行。
这个过程是一个闭环控制系统,主控制器通过不断的反馈和调整,保证了系统的稳定运行和精确控制。
三、主从控制系统的优点主从控制系统具有以下优点:1. 分布式控制:主从控制系统采用分布式控制结构,可以将复杂的控制任务分解为多个相对简单的子任务,分配给各个从控制器执行,提高了系统的处理能力和效率。
2. 灵活性和可扩展性:主从控制系统可以根据需要增加或减少从控制器的数量,以适应不同的系统规模和复杂度。
同时,由于每个从控制器都是独立的,因此可以在不影响其他控制器的情况下进行维护和升级。
主从同构穿刺手术机器人遥操作控制策略研究张忠林;熊璟;张东文【摘要】文章在分析了穿刺机器人系统功能需求的基础上,搭建了主从遥操作系统的半实物仿真平台。
基于等效微分变换的思想,提出雅克比矩阵(Jacobian Matrix)方法和比例微分(Proportional-Derivative,PD)控制律的联合控制方法。
通过设计数字滤波器来消除外科医生的手部低频抖动对穿刺手术机器人精度的影响。
实验结果表明从机器人末端执行器在笛卡尔空间坐标下能够精确快速安全地跟随主机器人末端执行器的位置变化,并且主机器人端的手部抖动能够被消除。
%In this paper, a semi-physical simulation platform of the master-slave robot control simulation system was built based on the analysis on functional requirements of the PHANToM OMNI robot system. Based on differential transformation method, the real-time master-slave control was executedby using Jacobian matrix and proportional-derivative(PD) close-loop control algorithm, and the digital iflter was designed to eliminate effects of surgeons’ hand low-frequency tremors on the precision of the master-slave control. The simulation experimental results demonstrate that the slave robot can follow precisely and quickly movements of the master robot and eliminate hand tremors.【期刊名称】《集成技术》【年(卷),期】2014(000)004【总页数】7页(P81-87)【关键词】穿刺手术机器人;主从控制;雅克比矩阵;PD控制算法;抖动消除【作者】张忠林;熊璟;张东文【作者单位】中国科学院深圳先进技术研究院深圳 518055;中国科学院深圳先进技术研究院深圳 518055;中国科学院深圳先进技术研究院深圳 518055【正文语种】中文【中图分类】TP242遥操作穿刺手术是通过专用手术器械插入患者体内,对患者体内的病灶进行手术操作的外科手术。
主从式机器人的系统控制策略
作者:张景生
来源:《科学与财富》2016年第16期
摘要:本文主要针对主从式机器人的系统控制策略展开了探讨,对机器人的控制作了详细的阐述,并为主从式机器人的控制策略及解算作了系统的分析,以期能为有关方面的需要提供有益的参考和借鉴。
关键词:主从式机器人;系统;控制策略
0 引言
随着科学信息技术的不断应用发展,主从式机器人系统的应用也得到了相应的创新进步。
然而在真正的应用过程中,若要进一步掌握主从式机器人的系统,就必须要采取有效的策略做好系统的控制。
基于此,本文就主从式机器人的系统控制策略进行了探讨,相信对有关方面的需要能有一定的帮助。
1 机器人控制
从工业机器人的系统构成来看,大致可以分为动作部分、检测部分和控制部分,如图1所示。
动作部分相当与机器人手臂、腕部、手指和行走机构足等具有动作功能的部分;检测部分是获得来自于操作对象物、机器人自身以及环境的种种信息,并对其作信息处理来认识对象物,感知自身状态和识别环境的部分;控制部分是基于来自检测等部分的信息,为了使动作部分完成目标操作所承担的控制功能的部分。
图1 机器人系统
1.1 机器人控制方式
机器人控制器是一个计算机控制系统,它包含高性能计算机,与机器人运动学和动力学建模有密切联系,并以机器人控制技术为理论。
机器人控制器有多种不同控制策略,有非伺服(开环)控制、伺服控制、基于传感信息的控制、最优PID控制、非线性反馈的动态补偿控制、自适应控制、变结构(滑模)控制、模糊控制、分级分散的多臂(或多机器人)协调控制等,但目前实用的多数还是PID伺服控制。
1.2 机器人控制的主要控制变量
一台机器人的各关节控制变量。
X(t)表示末端执行装置在空间的实时位置。
只有当关节θ1~θ6移动时,X才变化。
用矢量θ(t)来表示关节变量θ1至θ6。
各关节在力矩C1~C6作用下而运动,这些力矩构成矢量C(t);矢量C(t)由各传动电动机的力矩矢量T(t)经过
变速机送到各个关节。
这些电动机在电流或电压矢量V(t)所提供的动力作用下,在1台或多台微处理机的控制下,产生力矩T(t)。
对一台机器人的控制,本质上就是对下列双向方程式的控制:
1.3 机器人控制的控制层次
由此可见,计算机控制主要分为3个控制级,即人工智能级、控制模式级和伺服系统级。
第一级:人工智能级表示机器人所具有的指令和产生矢量以及这两者间的关系,是建立第一级(即最高级)控制的工作。
它包括与人工智能有关的所有可能问题,如词汇和自然语言理解、规划的产生以及任何描述等。
第二级:控制模式级这一级能够建立起X(t)和T(t)之间的双向关系。
重要的是必须记住,有多种可供采用的控制模式。
这是因为下列关系:
式中4个矢量之间的关系可建立4种模型:
在工业上一般不采用复杂的模型,而采用两种控制(又有很多变种)模型。
这些控制模型是以稳态理论为基础的,即认为机器人在运动过程中依次通过一些平衡状态。
这两种模型分别称为几何模型和运动模型。
前者利用X和θ间的坐标变换,后者则对几何模型进行线性处理,并假定X和θ变化很小。
属于几何模型的控制有位置控制和速度控制等,属于运动模型的控制有变分控制和动态控制等。
第三级:伺服系统级第三级所关心的是机器人的一般实际问题。
必须指出下列两点:
(1)控制第一级和第二级并非总是截然分开的。
是否把传动机构和减速齿轮包括在第二级,更是一个问题。
这个问题涉及解决下列问题:
当前的趋向是研究具有组合减速齿轮的电动机,它能直接安装在机器人的关节上。
不过,这样做的结果有产生惯性力矩和减速比的问题。
这是需要进一步解决的。
(2)—般的伺服系统是模拟系统,但它们已越来越普遍地为数字控制伺服系统所代替。
2主从式机器人的控制策略
图2所示系统控制策略中,Fm二和Fb为控制系统输入;rm、rs为控制系统输出。
PID控制部分由硬件实现。
即机器人模块根据输入Fm和Fs,计算出要产生力觉临场感,主、从伺服电机下一步应到达的位置rm和rs。
主手和从手被控制来跟踪相应虚拟内部模型生成的轨迹,每个模型的动力学参数可调,从而可以方便地改变机器人的操作性能。
由于主手在机构上的特殊设计,Mm、Ms、Cm、Cs均可看作常系数矩阵,可进行以下解算。
3 控制策略的解算
3.1 控制策略的(即动力学方程)描述
3.2 动力学方程整理
3.3由动力学方程写出动态方程
3.4 连续时间系统状态空间表达式的离散化
在用数字计算机求解连续时间系统动态方程时,由于数字计算机所处理的数据是数字量,数字量不仅在数值上是整量化的,而且在时间上是离散的,所以必须将连续时间系统状态空间表达式离散化。
设系统采样周期为T,且T较小(小于系统最小时间常数的1/10),所以有
具体离散化过程可见参考文献。
4 结束语
综上所述,近年来主从式机器人系统被广泛应用在医疗、深海等非结构性环境中,因此,为了进一步促进主从式机器人系统的应用,就需要认真掌握系统各方面的要点,采取有效的策略做好系统的控制。
参考文献
[1] 盛国栋、曹其新.遥操作机器人系统主从控制策略[J].江苏科技大学学报(自然科学版).2013(05).
[2] 黄晓萍、鲁守银、谈金东.主从式带电作业机器人控制系统[J].计算机系统应用.2013(22).。