和利时透平压缩机系统-T880系统-内
- 格式:ppt
- 大小:2.32 MB
- 文档页数:38
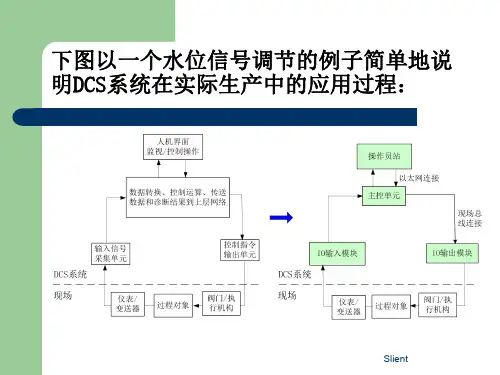

和利时最新DCS系统介绍网上搜不到的内部资料!本文导语杭州和利时自动化有限公司,工程设计中心项目设计部的徐屹昌工程师,就在第一时间给小7发来关于和利时最新DCS资料。
随后,浙江中控技术股份有限公司也发来相关资料。
因内容较多,小7只好逐一为大家呈现,今天介绍的和利时KM 系统(硬件)。
HOLLiAS MACS-K 系统是和利时公司于2013年正式推出的大型分布式控制系统。
重点提升系统的可靠性和易用性。
支持P-P(点对点结构)、C/S(客户机/服务器结构)、P-P和C/S(混合结构)三种网络构架。
吸收了安全系统的设计理念。
基于以太网和ProfiBus-DP现场总线构架,方便接入多种工业以太网和现场总线。
符合IEC61131-3标准,内部集成基于HART标准协议的AMS系统,并且方便集成SIS、PLC、MES、ERP系统等,以及众多知名厂家控制系统的驱动接口,可实现智能现场仪表设备、控制系统、企业资源管理系统之间无缝信息流传送,能方便的实现工厂智能化、管控一体化,集成多个行业先进控制算法平台,为工厂自动控制和企业管理提供全面的解决方案。
实现生产、设备和安全三大目标的协调最佳化,确保工厂生命周期内的投资维护成本最小,生产的运作目标可持续。
系统简介系统特点高可靠性全冗余系统网络、控制网络、控制器、电源模块、I/O模块均可冗余配置,无单点故障。
多重隔离系统总线和模块之间采用光电隔离;采用系统电源和现场电源双隔离供电;网络具有物理层和协议层双重隔离;全系列模块的各个通道之间完全故障隔离。
环境适应性系统基于恶劣的工业环境设计,符合EMC的设计规范,抗干扰性符合工业环境下的国际标准IEC61000,系统防腐蚀能力满足ISA S71.04标准G3等级要求。
高安全性系统网络采用确定性实时以太网通讯协议,标配带防火墙的交换机,保证网络安全;控制器CPU采用PowerPC构架工业级芯片,基于实时操作系统,内置防网络风暴组件;采用多比特位开关量和信号质量判断,故障倒向安全。
产品介绍:和利时T800k控制系统是基于HOLLiAS MACS系统中 K系列硬件设计的汽轮机DEH系统,T800 具有较强的对汽轮机主机及辅机系统扩展监控的能力,可以根据不同的用户需求,为汽轮机开发各种更为高级的控制功能。
产品特点:冗余的多功能总线,实现系统电源,现场电源,通讯总线全冗余。
可配置包含和利时T800kRTD,TC,AI,AO,DI,DO全系列模块冗余。
支持5ms、10ms、50ms执行周期,且每个方案页可单独设置,适合快慢不同现场。
模块可同时适应总线型和星型的拓扑结构,从收发器到通讯电缆全冗余。
T800-DEH控制系统系统支持1.5Mbps~3 Mbps的DP通讯速率,方便接入第三方DP设备。
系统支持接入100Mbps的工业以太网设备。
支持将模块转换为以太网接入其他系统。
全系列产品符号ISA-S71.04-1985 G3防护标准。
适应-20~60度的高湿温度及海拔3000米现场。
通过CE认证。
智能化DEH模块:K-FC01测速模块、K-SV01伺服模块全数字化可编程模块,齿数、跳闸转速、加速度阈值、伺服比例积分等数字化设置。
既可以独立使用,又可通过PROFIBUS-DP总线与和利时主控制系统一体化。
±10V ± 200mA范围电液伺服控制输出,可驱动各种电液伺服阀。
6线或3线制LVDT,RVDT直接接入伺服控制模块调制解调。
控制周期<30ms,确保DEH调节品质和孤网运行能力。
可通过MODBUS与其他控制系统通讯。
可通过CAN总线连成快速局域网。
控制系统按照“失效保护”和“安全自锁”的原则进行设计。
K-FC01测速模板采用三选二冗余方式。
I/O模块、主控单元、电源可以带电插拔。
所有I/O模块均为智能化设计。
T800性能指标:转速调节范围 0~3360r.p.m转速控制回路的控制精度≤1r/min大升速率下的超调量≤3r/min控制系统的转速迟缓率≤0.06%甩全负荷时的大超速≤7%额定转速,并能维持空转平均连续运行时间MTBF ≥25000小时系统可用率≥99.9%系统控制周期小于≤50ms系统具有防干扰措施,抗现场各种电磁波及通讯设备的干扰。
和利时T880控制系统在制冷压缩机中的应用制冷压缩机是制冷系统的核心和心脏,将热量从低温环境排放到高温环境,供工艺生产使用。
由于环境温度是经常变化的,故压缩机大部分时间是处于部分负荷状态,易发生喘振。
和利時专为压缩机组的控制研发了三重冗余容错控制系统和基于无关坐标系防喘振计算和控制算法,实现机组的安全可靠的控制,并有效避免喘振的发生。
标签:和利时T880控制系统;制冷压缩机;无关坐标系某公司是一个以合成氨生产为龙头,集化肥化工产品为一体的化工企业,公司的产品有合成氨、尿素、三聚氰胺、纯碱、氯化铵等。
原尿素装置中的制冷压缩机组采用电机拖动方式,控制系统采用TRICON系统对机组进行控制,并对实时状态进行监测。
2015年完成由电机拖动到汽轮机拖动的形式,并将控制系统替换成杭州和利时自动化有限公司的三重冗余容错(TMR)控制系统,即T880控制系统。
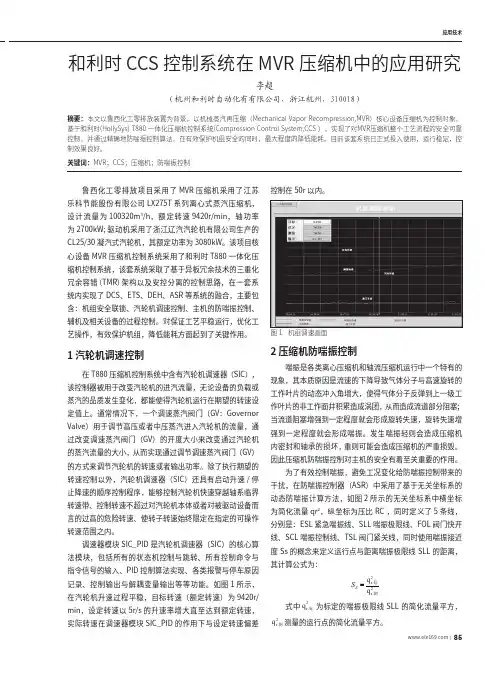
1 和利时T880控制系统概况1.1 架构图T880系统具有安全、可靠、配置方便、控制周期短等特点,能够最大限度地保证压缩机组在正常生产期间不发生误动作停车,最大程度地提高机组的运行效率。
如图1所示,是和利时公司T880控制系统的架构图,这种系统的最大优势是实现保护与控制的相对独立、提高系统安全性,CPU三冗余配置、通道三冗余配置、通讯卡双卡双网冗余,降级运行模式3-2-1-0。
根据压缩机控制系统点数特征设计专用控制模板、进行压缩机系统关键回路设计,快速任务与慢速任务在不同的CPU内运行、保证快速任务的实时性,快速回路控制速度快、典型应用控制周期≤20ms,IO采集速度快、数据更新时间≤2ms,通用DCS结构、通讯功能强大、并支持远程IO。
1.2 控制目标和利时T880控制系统的控制目标包括保证制冷压缩机在安全性高的条件下运行、并能够提供持续的喘振防护,喘振防护功能在保证运行安全的同时尽量不引起工艺的波动、不给生产活动带来能源浪费,最大程度地避免误停机现象的发生,并将机组运行效率最大化。
应用技术鲁西化工零排放项目采用了MVR压缩机采用了江苏乐科节能股份有限公司LX275T系列离心式蒸汽压缩机,设计流量为100320m3/h,额定转速9420r/min,轴功率为2700kW;驱动机采用了浙江辽汽汽轮机有限公司生产的CL25/30凝汽式汽轮机,其额定功率为3080kW。
该项目核心设备MVR压缩机控制系统采用了和利时T880一体化压缩机控制系统,该套系统采取了基于异板冗余技术的三重化冗余容错(TMR)架构以及安控分离的控制思路,在一套系统内实现了DCS、ETS、DEH、ASR等系统的融合,主要包含:机组安全联锁、汽轮机调速控制、主机的防喘振控制、辅机及相关设备的过程控制。
对保证工艺平稳运行,优化工艺操作,有效保护机组,降低能耗方面起到了关键作用。
1 汽轮机调速控制在T880压缩机控制系统中含有汽轮机调速器(SIC),该控制器被用于改变汽轮机的进汽流量,无论设备的负载或蒸汽的品质发生变化,都能使得汽轮机运行在期望的转速设定值上。
通常情况下,一个调速蒸汽阀门(GV:Governor Valve)用于调节高压或者中压蒸汽进入汽轮机的流量,通过改变调速蒸汽阀门(GV)的开度大小来改变通过汽轮机的蒸汽流量的大小,从而实现通过调节调速蒸汽阀门(GV)的方式来调节汽轮机的转速或者输出功率。
除了执行期望的转速控制以外,汽轮机调速器(SIC)还具有启动升速/停止降速的顺序控制程序,能够控制汽轮机快速穿越轴系临界转速带、控制转速不超过对汽轮机本体或者对被驱动设备而言的过高的危险转速、使转子转速始终限定在指定的可操作转速范围之内。
调速器模块SIC_PID是汽轮机调速器(SIC)的核心算法模块,包括所有的状态机控制与跳转、所有控制命令与指令信号的输入、PID控制算法实现、各类报警与停车原因记录、控制输出与解耦变量输出等等功能。
如图1所示,在汽轮机升速过程平稳,目标转速(额定转速)为9420r/ min,设定转速以5r/s的升速率增大直至达到额定转速,实际转速在调速器模块SIC_PID的作用下与设定转速偏差控制在50r以内。
和利时 T880控制系统在合成气压缩机组控制中的运用分析摘要:合成气压缩机是一种用途广泛的离心式压缩机,是重要的化工气体压缩运输设备。
如其因压缩机喘振、超速等原因引发联锁停机,会导致物料回流循环、增加能耗或放火炬,造成重大经济损失和环境污染。
因此,要求合成气压缩机组控制系统满足高准确性、高可靠性的控制要求。
本文分析了和利时 T880 三重化冗余控制器的特点和优势,并探讨了其在合成气压缩机组控制中的运用。
关键词:和利时;T880;合成气压缩机;控制系统1概述随着大型压缩机组生产工艺的复杂性增高、工业现场环境的不稳定因素增加,对于大型压缩机组及其控制系统的抗干扰性、稳定性、实时性、安全可靠性都有着更高的要求,国际通用规范(API)要求大型压缩机连续运行三年以上不需要停车检修。
压缩机是工艺装置的核心设备,一但压缩机运行不稳定甚至联锁停机,便会造成物料、能量、环境的损失,甚至给装置带来安全隐患。
因此压缩机安全、长周期平稳运行十分重要。
其中,控制系统的性能直接关系到压缩机运行的平稳性和可靠性,是压缩机组控制中的重点。
2 T880 控制系统特点和利时T880 一体化压缩机控制系统采取了基于异板冗余技术的三重化冗余容错架构以及安控分离的控制思路。
采用了与和利时 HiaGuard SIS 系统复用的硬件平台,3重冗余的高速控制器在物理上相互独立,具有 3-2-1-0 的降级使用模式,SOE 精度可达 1ms,使得安全回路可用率达到 99.999%,可以安全有效地为机组提供紧急停车保护。
利时T880一体化压缩机控制系统应用和利时综合集成控制系统平台MACS,其监控网络可实现工程师站、操作员站、现场控制站之间的数据通讯。
可在工程管理器界面上,完成控制站组态、操作员站组态、图形组态、系统组态以及报表编辑等功能。
支持数据采集、逻辑控制、设备状态监视、报警服务、趋势服务、操作日志记录、SOE等功能。
可以保证工艺平稳运行,优化工艺操作,有效保护机组,并降低能耗。
通用透平控制器(T80/T80C)技术规格(发电机组适用)1.总则1.1 本技术规格对汽轮机数字电液控制保护系统提出了技术上的和其它相关方面的要求,是按对一套DEH的要求编制的。
1.2 本技术规格书并未对所有技术细节作出说明,也未充分引述与之有关的协议和标准。
供方保证提供符合技术协议书和有关工业标准要求的经过实践的代表当今技术的优质DEH产品。
供方提供DEH的电子硬件及软件,编程组态及现场技术服务。
2.功能说明T80/T80C单/双通道通用透平控制器(Turbine Control Module),是一种小型透平机械控制设备,适用于12MW以下的各种余热发电、垃圾发电、生物质发电、太阳能热发电和工业拖动等机组,可以提供孤网运行、热电牵连调节、补汽调节、滑压运行等控制策略。
控制器硬件采用工业级元件,符合军用标准GJB/Z35-93,抗电磁干扰能力符合GJB151A、HJB34-1990及IEC61000-4,保证控制器在工业环境中长期稳定、可靠地运行。
3.控制原理图4. 主要控制功能及技术指标4.1 T80/T80C功能对汽轮发电机组的转速、负荷进行控制,包括以下功能:4.1.1 控制功能升速设置目标转速后,机组可自动沿当前热状态对应的经验曲线控制调节阀,完成升速暖机过临界直到额定转速定速控制。
自动同期汽机定速后,DEH可接受自动同期装置指令,自动将机组控制到同步转速。
并网带初负荷发电机并网后,DEH自动增加给定值,使发电机自动带上初负荷避免出现逆功率。
升负荷机组并网后,司机可根据需要采用阀控方式或功控方式完成升负荷过程。
阀控方式设置目标阀位直接控制调门开度,DEH维持阀位不度。
这时,机组负荷与蒸汽压力自动平衡。
功控方式设置目标功率来控制机组负荷,DEH以汽机实发功率作为反馈信号进行功率闭环控制,维持机组负荷不变。
主汽压力控制设置目标值来控制机组主汽压力,DEH以汽机实际主汽压力作为反馈信号进行主汽压力闭环控制,维持机组主汽压力不变。
和利时助力世界首台(套)300兆瓦级压缩空气储能电站并网发
电
佚名
【期刊名称】《变频器世界》
【年(卷),期】2024(27)4
【摘要】4月9日,世界首台(套)300兆瓦级压气储能电站,湖北应城300兆瓦级压气储能电站示范工程首次并网一次成功,创造了单机功率、储能规模、转换效率3项世界纪录,以及6个行业示范数十项国际首创、全球首次突破,项目入选了国家能源局发布的《第三批能源领域首台(套)重大技术装备(项目)名单》。
和利时为该项目提供了300MW非补燃压缩空气透平膨胀机DEH、ETS及ATC控制系统。
【总页数】1页(P57-57)
【正文语种】中文
【中图分类】F42
【相关文献】
1.世界首套!中国能建300兆瓦级压缩空气储能系统亮相兰洽会
2.我国首台(套)300兆瓦级压缩空气储能示范工程开工
3.首套百兆瓦级压缩空气储能项目主体工程启动
4.世界首台(套)湖北应城300MW级压缩空气储能电站厂用系统受电一次成功
5.世界首台300 MW级压缩空气储能电站并网发电
因版权原因,仅展示原文概要,查看原文内容请购买。
和利时T880控制系统在多级组装式压缩机组的应用研究作者:贾超来源:《科技风》2019年第12期摘要:本文简要介绍了多级组装式压缩机组特点,在满足压缩机在工艺流程中的重要性和高可靠性控制要求的情况下,国产T880控制器继承和延续了三重化冗余的先进设计理念,为国产三冗余系统在组装式压缩机组控制上的应用提供参考和借鉴。
关键词:三冗余;控制功能;转速控制;防喘振1 概述近年来随着我国冶金、石油、化工等领域不断新建、改扩建项目,由于工业现场环境的不定因素及生产工艺的复杂性比较高,对于大型压缩机组及其控制系统的抗干扰性、稳定性、实时性、可靠性及安全性都有着越来越高的要求。
2 多级组装式离心压缩机组特点本项目我公司设计制造的SVK8-4H氮气压缩机组使用的装置为新能能源有限公司 20万吨/年稳定轻烃项目 LNG装置。
本装置以煤气化制取的原料气进行深冷液化分离,得到产品LNG。
工艺装置主要包括深冷分离、制冷剂罐区、LNG储罐、LNG装车站等。
上述的氮气压缩机用于 LNG装置深冷分离。
而深冷分离是整个LNG装置的核心工段。
SVK8-4H是由汽轮机驱动的整体齿式多级组装式压缩机组。
由于机组的结构特点和作为深冷分离的核心工段,机组有其突出的重要性,本项目采用国产和利时T880系列控制器,CPU、输入输出卡均采用三重模块冗余架构,保证机组的高可靠性、稳定性控制要求。
3 和利时T880控制系统配置特色3.1 三冗余的前端控制器本项目系统设置3个ETM281智能前端控制器。
3个模块通过连接器与专用机笼 ETM100的底板以及对应端子模块相连接,完成对现场模拟量和开关量信号的采集;进行快速的数据交换、数据处理、输入数据表决、逻辑运算、输出数据表决等;再将结果以模拟量和开关量信号形式输出到现场。
ETM281智能前端控制器采用三重模块冗余(TMR)架构,即 3个 ETM281模块组成冗余的三系;具有独立的固定控制周期,冗余的三系控制器之间在每个控制周期内同步运行;3 系冗余工作时,工作模式为 3-2-1-0,自动升降级。
42DCS的通信网络是连接所有控制和人机交互设备的中枢,所有监视、操作和控制信息均通过这一通信网络进行传送,是体现分散控制系统信息集中、功能分散、危险分散原则的桥梁纽带。
网络通信的正常与否将直接影响DCS工作的可靠性和实时性,提高网络的可用性,已成为提高DCS系统可靠性和实时性的关键因素。
一、800MW机组DCS网络结构绥中800MW机组DCS改造采用了和利时生产的HOLLIAS-MACS V6系统,网络由100M/1000M自适应的高速冗余网络构成,用于系统历史站与操作员站、工程师站、控制器、通信站、网络打印机的连接,完成整个系统的数据监视,并对操作员的各种操作请求做出响应,如图形切换、数据显示、趋势显示、报表打印、屏幕拷贝、表格日志查询等。
工程师站与I/O 控制站站连接,完成控制站的数据下装;增加测点,修改画面或方案页,下装操作站和控制站直接生效。
操作员站与控制器点对点通信。
历史站与控制站之间进行实时数据通信。
提供数据采集的备份功能。
800MW机组DCS网络采用P2P 结构,操作与控制采用一个冗余网络,即由一个128网和一个129网组成,两个网络相互独立的运行,中间无交叉连接。
网络交换机的型号为WS 2960-24T C,单元机组2×6台,公用系统网络2×1台。
每个交换机有24个以太网10/100Mbps端口,2个固定以太网10/100/1000Mbps上行端口。
二、DCS网络问题分析DCS的每个控制器、操作员站、历史站等所有连接128、129网上的设备,源设备发送的信息在两个网中双路并行,在正常的情况下,目的设备接收信息包以先到为主,后到的信息包废弃。
1.多交换机互联问题。
两台单元机组的网段各有2×6台交换机,公用系统网络有2×1台交换机。
因此,128网、129网各有13台交换机,网络设备部件太多,每个交换机之间都是简单的级联。
难免会出现故障,一旦出现交叉故障时,就会发生128与129同时断网。
氧气透平压缩机控制组态程序(和利时MACSV系统)第一部分:氧透启动停车时序控制程序程序声明部分:PROGRAM OC_SFC(*氧透启动停车时序*)V AR RETAINDELAY:TON;(*计时器*)INIT:BOOL:=TRUE;STEP2:BOOL;STEP3:BOOL;STEP4:BOOL;STEP5:BOOL;STEP6:BOOL;STEP7:BOOL;STEP8:BOOL;STEP9:BOOL;STEP10:BOOL;STEP11:BOOL;STEP12:BOOL;STEP13:BOOL;STEP14:BOOL;STEP15:BOOL;STEP16:BOOL;STEP17:BOOL;STEP22:BOOL;STEP23:BOOL;STEP24:BOOL;STEP32:BOOL;STEP33:BOOL;STEP34:BOOL;_INIT:BOOL:=TRUE;_STEP2:BOOL;_STEP3:BOOL;_STEP4:BOOL;_STEP5:BOOL;_STEP6:BOOL;_STEP7:BOOL;_STEP8:BOOL;_STEP9:BOOL;_STEP10:BOOL;_STEP11:BOOL;_STEP12:BOOL;_STEP13:BOOL;_STEP14:BOOL;_STEP15:BOOL;_STEP16:BOOL;_STEP17:BOOL;_STEP22:BOOL;_STEP23:BOOL;_STEP24:BOOL;_STEP32:BOOL;_STEP33:BOOL;_STEP34:BOOL;END_V AR程序主体部分:采用SFC语言编制,利用该语言的并行分支功能实现正常停车、重故障停车、喷氮停车程序的跳转。
InitOC_OCTIP:=0;(*停车状态*)DELAY(IN:=FALSE);(*计时器复位*)PID_V3304_TS:=FALSE;OC_OCQDLS:=TRUE;OC_OCRING:=FALSE;(*关闭警铃*)STOP3301:=FALSE;Step2入口动作:OC_AM3301:=TRUE;OC_AM3302:=TRUE;OC_AM3303:=TRUE;OC_AM3304:=TRUE;OC_AM3306:=TRUE;OC_AM3309:=TRUE;OC_AM3315:=TRUE;OC_AM3316:=TRUE;OC_AM3317:=TRUE;OC_AM3318:=TRUE;DELAY(IN:=FALSE);动作:IF SO3350=FALSE THENOC_OCTIP:=1;(*氧透准备启动*)OC_ZD3301:=FALSE;(*全关*)OC_ZD3302:=TRUE;(*全开*)OC_ZD3303:=FALSE;(*全开*)OC_ZD3304:=TRUE;(*全关*)PID_V3304_TS:=TRUE;(*V3004跟踪0*)OC_ZD3306:=FALSE;(*全关*)OC_ZD3309:=FALSE;(*全开*)OC_ZD3315:=FALSE;(*全关*)OC_ZD3316:=TRUE;(*全开*)OC_ZD3317:=TRUE;(*可调节*)OC_ZD3318:=FALSE;(*全关*)OC_OCLS1:=FALSE;(*进口压力联锁*)OC_OCLS5:=FALSE;(*轴封差压联锁*)OC_OCLS6:=FALSE;(*轴封差压联锁*)OC_OCQDLS:=TRUE;(*氧透启动联锁允许*) OC_OCQDLS:=TRUE;DELAY(IN:=TRUE,PT:=T#10S);END_IF退出动作:OC_AM3301:=FALSE;OC_AM3302:=FALSE;OC_AM3303:=FALSE;OC_AM3304:=FALSE;OC_AM3306:=FALSE;OC_AM3309:=FALSE;OC_AM3315:=FALSE;OC_AM3316:=FALSE;OC_AM3317:=FALSE;OC_AM3318:=FALSE;Step3入口动作:DELAY(IN:=FALSE);动作:OC_OCTIP:=2;(*氧透可以启动*)Step4入口动作:DELAY(IN:=FALSE);OC_OCRING:=FALSE;动作:OC_OCTIP:=3;(*启动*)DELAY(IN:=TRUE,PT:=T#10S);OC_OCRING:=TRUE;Step5入口动作:DELAY(IN:=FALSE);动作:OC_OCQDLS:=FALSE;(*切除启动联锁*) OC_OCRING:=FALSE;(*关闭警铃*)DELAY(IN:=TRUE,PT:=T#180S);OC_OCTIP:=4;(*氧透启动关闭警铃*)Step6入口动作:DELAY(IN:=FALSE);OC_OCLS:=TRUE;(*停车联锁投入*) OC_AM3302:=TRUE;OC_AM3303:=TRUE;OC_AM3304:=TRUE;动作:OC_OCTIP:=5;(*V3303/V3304可调节*) OC_ZD3302:=FALSE;(*全关*)OC_ZD3303:=TRUE;(*可调*)OC_ZD3304:=TRUE;(*可调*)PID_V3304_TS:=FALSE;(*可调*) DELAY(IN:=TRUE,PT:=T#180S);退出动作:OC_AM3302:=FALSE;OC_AM3303:=FALSE;OC_AM3304:=FALSE;Step7动作:OC_OCTIP:=41;(*等待主断路器投入*)Step8入口动作:DELAY(IN:=FALSE);动作:OC_OCTIP:=6;(*氧气进口阀可以打开*) DELAY(IN:=TRUE,PT:=T#1S);Step9入口动作:DELAY(IN:=FALSE);OC_AM3316:=TRUE;OC_AM3317:=TRUE;OC_AM3309:=TRUE;动作:OC_OCTIP:=7;(*关V3316/V3317;*) OC_ZD3309:=TRUE;DELAY(IN:=TRUE,PT:=T#25S);IF DELAY.ET>=T#20S THENOC_ZD3317:=FALSE;END_IF退出动作:OC_AM3316:=FALSE;OC_AM3317:=FALSE;OC_AM3309:=FALSE;Step10入口动作:DELAY(IN:=FALSE);OC_AM3318:=TRUE;动作:OC_OCTIP:=8;(*开V3318*)OC_ZD3318:=TRUE;DELAY(IN:=TRUE,PT:=T#10S);退出动作:OC_AM3318:=FALSE;Step11入口动作:DELAY(IN:=FALSE);动作:OC_OCTIP:=9;(*出口阀可以打开*)OC_OCLS1:=TRUE;(*进口压力联锁投入*) OC_OCLS5:=TRUE;(*差压联锁投入*)OC_OCLS6:=TRUE;(*差压联锁投入*)Step12动作:OC_OCTIP:=10;(*氧透正常运行*)Step13入口动作:OC_AM3304:=TRUE;动作:OC_OCTIP:=11;(*正常停车*)OC_ZD3304:=FALSE;(*失电*)退出动作:OC_AM3304:=FALSE;Step14入口动作:OC_AM3302:=TRUE;OC_AM3309:=TRUE;动作:OC_OCTIP:=12;(*开V3302,V3303,V3309*)OC_ZD3302:=TRUE;(*全开*)OC_ZD3303:=FALSE;(*失电*)OC_ZD3309:=FALSE;(*失电*)OC_OCLS1:=FALSE;(*进口压力联锁解除*)OC_OCLS5:=FALSE;(*轴密封氧气与混合气差压联锁解除*) OC_OCLS6:=FALSE;(*轴密封氮气与混合气差压联锁解除*) 退出动作:OC_AM3302:=FALSE;OC_AM3303:=FALSE;OC_AM3309:=FALSE;Step15入口动作:OC_AM3306:=TRUE;DELAY(IN:=FALSE);动作:OC_ZD3306:=FALSE;(*全关*)DELAY(IN:=TRUE,PT:=T#120S);STOP3301:=TRUE;OC_OCTIP:=121;退出动作:OC_AM3306:=FALSE;STOP3301:=FALSE;Step16入口动作:OC_AM3301:=TRUE;DELAY(IN:=FALSE);动作:OC_OCTIP:=13;(*全关V3301*)OC_ZD3301:=FALSE;(*全关*)DELAY(IN:=TRUE,PT:=T#180S);退出动作:OC_AM3301:=FALSE;Step17入口动作:OC_AM3304:=TRUE;动作:OC_ZD3304:=TRUE;(*得电*)PID_V3304_TS:=TRUE;(*跟踪0*)OC_OCTIP:=131;(*全关V3304*)退出动作:OC_AM3304:=FALSE;Step22入口动作:DELAY(IN:=FALSE);OC_AM3302:=TRUE;OC_AM3303:=TRUE;OC_AM3304:=TRUE;OC_AM3306:=TRUE;OC_AM3309:=TRUE;动作:OC_OCTIP:=22;(*重故障停车*)OC_ZD3302:=TRUE;(*全开*)OC_ZD3303:=FALSE;(*失电*)OC_ZD3304:=FALSE;(*失电*)OC_ZD3306:=FALSE;(*全关*)OC_ZD3309:=FALSE;(*失电*)OC_OCLS1:=FALSE;(*进口压力联锁切除*) OC_OCLS5:=FALSE;(*轴封压力联锁切除*) OC_OCLS6:=FALSE;(*轴封压力联锁切除*) DELAY(IN:=TRUE,PT:=T#2M);STOP3301:=TRUE;退出动作:OC_AM3302:=FALSE;OC_AM3303:=FALSE;OC_AM3304:=FALSE;OC_AM3306:=FALSE;OC_AM3309:=FALSE;Step23入口动作:DELAY(IN:=FALSE);OC_AM3301:=TRUE;动作:OC_OCTIP:=23;(*关V3301*)DELAY(IN:=TRUE,PT:=T#180S);OC_ZD3301:=FALSE;(*全关*)退出动作:OC_AM3301:=FALSE;Step24入口动作:OC_AM3304:=TRUE;DELAY(IN:=FALSE);动作:OC_OCTIP:=24;(*关V3304*)OC_ZD3304:=TRUE;(*得电*)PID_V3304_TS:=TRUE;(*跟踪0*)DELAY(IN:=TRUE,PT:=T#1S);退出动作:OC_AM3304:=FALSE;Step32入口动作:DELAY(IN:=FALSE);OC_AM3301:=TRUE;OC_AM3302:=TRUE;OC_AM3303:=TRUE;OC_AM3304:=TRUE;OC_AM3306:=TRUE;OC_AM3309:=TRUE;OC_AM3315:=TRUE;OC_AM3316:=TRUE;OC_AM3318:=TRUE;动作:OC_OCTIP:=32;(*喷氮停车*)OC_ZD3301:=FALSE;(*全关*)OC_ZD3302:=TRUE;(*全开*)OC_ZD3303:=FALSE;(*失电*)OC_ZD3304:=FALSE;(*失电*)OC_ZD3306:=FALSE;(*全关*)OC_ZD3309:=FALSE;(*失电*)OC_ZD3315:=TRUE;(*得电*)OC_ZD3316:=TRUE;(*得电*)OC_ZD3318:=FALSE;(*失电*)OC_OCLS1:=FALSE;(*进口压力联锁切除*) OC_OCLS5:=FALSE;(*轴封压力联锁切除*) OC_OCLS6:=FALSE;(*轴封压力联锁切除*) OC_OCOPMA1:=FALSE;OC_OCOPMA2:=FALSE;OC_OCOPMC1:=TRUE;OC_OCOPMC2:=TRUE;DELAY(IN:=TRUE,PT:=T#60S);STOP3301:=TRUE;退出动作:OC_AM3301:=FALSE;OC_AM3302:=FALSE;OC_AM3303:=FALSE;OC_AM3304:=FALSE;OC_AM3306:=FALSE;OC_AM3309:=FALSE;OC_AM3315:=FALSE;OC_AM3316:=FALSE;OC_AM3318:=FALSE;OC_OCOPMC1:=FALSE;OC_OCOPMC2:=FALSE;Step33入口动作:DELAY(IN:=FALSE);OC_AM3315:=TRUE;OC_AM3316:=TRUE;OC_AM3318:=TRUE;动作:OC_OCTIP:=33;(*关V3315/V3316*) DELAY(IN:=TRUE,PT:=T#240S); OC_ZD3315:=FALSE;(*全关*)OC_ZD3316:=FALSE;(*全关*)OC_ZD3318:=TRUE;(*得电*)退出动作:OC_AM3315:=FALSE;OC_AM3316:=FALSE;OC_AM3318:=FALSE;Step34入口动作:OC_AM3304:=TRUE;动作:OC_OCTIP:=34;(*关V3304*)OC_ZD3304:=TRUE;(*得电*)PID_V3304_TS:=TRUE;(*跟踪0*) 退出动作:OC_AM3304:=FALSE;。