第10章 材料的超弹性力学行为
- 格式:ppt
- 大小:853.00 KB
- 文档页数:34


光学透明胶的超弹性力学性能表征方法研究贾永臻【摘要】光学透明胶(OCA)的复杂力学行为可以导致柔性显示屏幕表面形成波浪状条纹,最终影响显示效果.而构建OCA胶材的力学本构模型是研究柔性OLED屏幕应力管控问题的关键.本文采用DMA和旋转流变仪,分别测试了OCA胶材在拉伸和简单剪切变形模式下的应力应变关系,并选用减缩多项式模型和Arruda-Boyce模型建立OCA胶材的超弹性本构模型.基于实验获取的应力应变数据,采用Levenberg-Marquardt算法,完成了模型参数的拟合和Drucker稳定性评估.结果表明:三阶以上的减缩多项式模型可以构建出适用于OCA胶材的高精度超弹性本构模型.【期刊名称】《中南民族大学学报(自然科学版)》【年(卷),期】2018(037)004【总页数】4页(P84-87)【关键词】光学透明胶;柔性OLED;超弹性本构;减缩多项式模型;Arruda-Boyce模型【作者】贾永臻【作者单位】北京大学深圳研究生院,深圳518055【正文语种】中文【中图分类】O484.2柔性显示屏幕是未来显示技术的一个重要研发方向. 当前,柔性屏幕各个膜层间常采用光学透明胶材(Optically Clear Adhesive, OCA)进行粘接[1, 2],柔性屏幕的整体变形过程中,OCA胶材的力学行为最为复杂,易发生粘性流动,导致屏幕表面不平整,是形成波纹状显示效果的主要原因. 构建OCA胶材的力学本构模型是仿真分析波纹状显示效应的理论基础. Yeh[3]等率先建立了柔性屏幕的弯折仿真模型,但是该研究将OCA胶材看作简单的线弹性材料,无法对屏幕摊平及回弹过程中的非线性大变形问题进行解析. 薛宗伟[4]建立了基于小压缩变形数据的OCA超弹性本构模型,同样无法应用于柔性显示屏幕的大变形分析. 基于此,本文展开对OCA 胶材力学行为的基础研究,通过力学性能测试,获取了OCA胶材在单轴拉伸和简单剪切两种大变形模式下的应力应变曲线,并选用唯象模型和热力学模型,建立OCA胶材的超弹性本构模型.1 实验测试OCA胶材可以在发生大变形的情况下,卸载后自动恢复为初始形状,符合超弹性材料的一般特征,可以采用超弹性本构模型建立OCA胶材的弹性力学行为. 传统橡胶类超弹性材料通常采用单轴试验、双轴试验和平面试验等三种实验方法获取其应力应变曲线,但是OCA胶材的模量很低,商业化的双轴和平面拉伸试验机的传感器精度无法准确获取OCA胶材的应力变化,因此,采用精密度较高的动态机械分析仪和旋转流变仪,分别对OCA胶材的拉伸行为和简单剪切行为进行测试.首先进行试样制备,将3M公司生产的OCA胶材叠层粘接,厚度h达到1 mm,之后再按照夹具要求完成试样的切割,两种变形模式所采用的测试设备及相应的样品尺寸如表1所示. DMA拉伸测试时,拉伸速率参考ASTM标准D412[5];采用旋转流变仪进行简单剪切测试时,剪切应变速率控制在0.01 s-1.表1 试验测试设备及样品尺寸规格Tab.1 Test equipment and sample sizespecifications测试变形模式单轴拉伸简单剪切样品要求长条形试样,长l=50 mm;宽b=5 mm圆盘状试样,半径r= 40 mm测试仪器DMA动态机械分析仪旋转流变仪仪器厂商及型号TA InstrumentsRSA-G2TA InstrumentsDHR-2测试精度0.01 mN0.01 mN原始实验数据经过处理后,可以提取出应力σ和应变ε数据,具体的计算公式如下所示.(1)单轴拉伸变形模式下,拉伸应变εT和拉伸应力σT的关系式:(1)式中,l0表示试样原始长度;l表示试样拉伸长度;f表示拉伸载荷.(2)简单剪切变形模式下,剪切应变γs和剪切应力σs的关系式如下:(2)式中,φ表示平行板的旋转位移;τ表示平行板扭矩.2 超弹性本构模型构建及参数拟合2.1 基本理论超弹性材料的基本物理特征是弹性变形过程中熵产率为0,不发生能量耗散,因此超弹性材料的本构关系可以通过应变能密度函数U的形式给出:U=U(l1,l2,l3),(3)式中,l1,l2,l3分别为变形张量的三个不变量. 这些不变量和主伸长率λi(i=1,2,3)的关系如下:(4)式中,γi表示主应变,I3可以表征材料体积的变化,也用Jei表示,OCA胶材通常认为是不可压缩的,有I3=1.将应变能密度函数对主伸长率求偏导,得出Cauchy应力张量与主伸长率的关系[6]:(5)式中,p表示静水压力.2.2 应变能密度函数与变形模式超弹性材料的应变能密度函数主要分为维象模型和统计热力学模型两大类,基于经验的维象模型主要包括Ogden模型、多项式模型、减缩多项式模型、Marlow模型等,其中减缩多项式模型的实验拟合精度较高,同时仿真计算的收敛性较好,是比较常用的唯象模型之一. 统计热力学模型则主要有Arruda-Boyce模型、Van der Waals模型和Gent模型等. 下面将分别给出两类模型中比较有代表性的减缩多项式模型和Arruda-Boyce模型的具体表达式,以及在不同变形模式下推导出的应力应变关系.由式5可以导出具体变形模式下Cauchy应力张量σi的表达式. 在单轴拉伸变形模式下,拉伸应力的表达式为[7]:(λ1=1+εT).(6)在简单剪切变形模式下,剪切应力的表达式为:(7)2.2.1 减缩多项式模型减缩多项式(Reduced Polynomial)模型[8, 9]中忽略了第二变形张量不变量对于应变能的影响,具体的应变能密度函数表达式为:(8)式中,N表示多项式的阶数;Ci0=(i=1~6)为表征剪切变形的材料常数,Di为表征体积变形的材料常数,对于OCA胶材不予考虑.将式(8)代入式(6)和(7),可得到减缩多项式本构模型中的应力-应变关系. 在单轴拉伸变形模式下,其应力应变关系为:(9)其中,λT=1+εT 在简单剪切变形模式下,其应力应变关系为:(10)2.2.2 Arruda-Boyce模型Arruda-Boyce模型[10]是一类由非高斯统计理论建立的简单热力学模型,其应变能函数表达式如下:(11)式中,μ、λm为表征剪切变形的材料常数.将式(11)代入式(6)和(7),可得到Arruda-Boyce本构模型中的应力-应变关系. 在单轴拉伸变形模式下,其应力应变关系为:(12)在简单剪切变形模式下,其应力应变关系为:(13)3 参数拟合与分析基于上述推导出的应力-应变关系,结合单轴拉伸和简单剪切的实验数据,即可实现超弹性参数的拟合. 目前,尚无商业化的仿真软件可以将单轴拉伸和简单剪切数据同时拟合,也未见相关的公式推导和拟合方法等内容有公开报道. 本文利用数学软件1Stopt,采用Levenberg-Marquardt算法,按照上述本构方程编写代码,实现了单轴拉伸与简单剪切数据的同时拟合,具体结果如表2所示.表2 OCA胶材的超弹性本构模型参数拟合误差分析Tab.2 The fitting error analysis of the OCA hyperelastic constitutive model本构模型模型参数RMS误差Drucker稳定性Reducedpolynomial N=1C100.283稳定Reducedpolynomial N=2C10=5.73×10-3C20=-7.79×10-3 0.164不稳定Reducedpolynomial N=3C10=6.74×10-3C20=-2.5×10-4C30=7.53×10-60.0979稳定Reducedpolynomial N=4C10=7.40×10-3C20=-4.74×10-4C30=-3.12×10-5C40=-7.83×10-70.0725不稳定ReducedpolynomialN=5C10=7.88×-3C20=-7.51×-3C30=8.41×-4C40=-4.87×-5C50=1.1×-60.0590稳定Arruda-Boyceμ=9.05×10-3λm=9.98×105 0.283稳定完成参数拟合的本构模型需进行Drucker稳定性评估,对于通过稳定性评估的本构模型,其应力应变曲线如图1~4所示.由应力应变曲线的拟合结果对比后可知,Arruda-Boyce本构模型和一阶减缩多项式模型的拟合误差较大,在拉伸和简单剪切变形模式下,其力学行为趋近于线弹性. Ritto等[7]进行了基于简单剪切数据的超弹性本构模型参数拟合,其研究成果指出,拟合误差控制在0.2以内,就代表了较高的拟合精度. 由表2可知,三阶(拟合误差0.0979)和五阶的减缩多项式模型(拟合误差0.0590)具备了较好的拟合精度,相较而言,五阶减缩多项式本构模型的拟合精度更高,但是更高阶数的本构模型在仿真分析时会带来较严重的收敛性问题,因此,对于柔性OLED屏幕的应力管控问题,本文推荐采用三阶减缩多项式本构模型进行研究.图1 一阶减缩多项式本构模型的拟合结果Fig.1 Fitting result of the first-order reduced polynomial model图2 三阶减缩多项式本构模型的拟合结果Fig.2 Fitting result of the third-order reduced polynomial model图3 五阶减缩多项式本构模型的拟合结果Fig.3 Fitting result of the fifth-order reduced polynomial mode图4 Arruda-Boyce本构模型的拟合结果Fig.4 Fitting result of the Arruda-Boyce model4 结语基于应变能函数的超弹性模型是描述材料超弹性行为的一种有效方法. 本文采用DMA和流变仪准确测得了OCA胶材在拉伸和简单剪切变形模式下的应力应变曲线,为构建胶材的超弹性模型准备了充足的原始数据. 以减缩多项式模型和Arruda-Boyce模型作为OCA胶材的应变能函数,推导了两种模型在拉伸和简单剪切变形模式下的应力应变公式,并使用Levenberg-Marquardt算法,实现了同时运用单轴拉伸与简单剪切数据,完成本构模型的参数拟合. 通过Druker稳定性评估,最终筛选出了与实验吻合精度高的本构模型及相应参数. 该理论算法可适用于一般胶黏剂材料的超弹性本构模型构建及参数拟合.参考文献【相关文献】[1] 杨青. 光学透明胶特性及其在触控显示行业中的应用[J]. 中国胶粘剂,2014,23(8): 56-58.[2] 孙金媛,黄家健,周华俊,等. 膨胀单体改性液态光学胶的制备及性能[J]. 高分子材料科学与工程,2015,31(2):155-159.[3] Yeh M K,Chang L Y,Cheng H C,et al. Bending stress analysis of laminated foldable touch panel[J]. Procedia Engineering,2014,79(3):189-193.[4] 薛宗伟. 基于Abaqus的光学胶动态力学行为分析[J]. 计算机辅助工程,2013,22(s2):404-407.[5] ASTM International. Standard test methods for vulcanized rubber and thermoplastic elastomers-tension D412 [S]. West Conshohocken,Pennsylvania,United States: ASTM International,2003,9.[6] 傅志红,喻坚,魏灵娇. 聚碳酸酯的应力松弛实验及数据处理分析[J]. 塑料工业,2014,42(6): 89-92.[7] Ritto T G,Nunes L C S. Bayesian model selection of hyperelastic models for simple and pure shear at large deformations [J]. Computers & Structures,2015,156: 101-109.[8] Darijani H,Naghdabadi R. Hyperelastic materials behavior modeling using consistent strain energy density functions [J]. Acta Mechanica,2010,213(3-4): 235-254.[9] Mao Y,Li Y,Chen Y,et al. Hyperelastic behavior of two rubber materials under quasistatic and dynamic compressive loadings — testing,modeling and application[J]. Polimery -Warsaw-,2015,60(7/8):516-522.[10] Boyce M C. Direct comparison of the gent and the Arruda-Boyce Constitutive models of rubber elasticity [J]. Rubber Chemistry & Technology,1996,69(5): 781-785.。

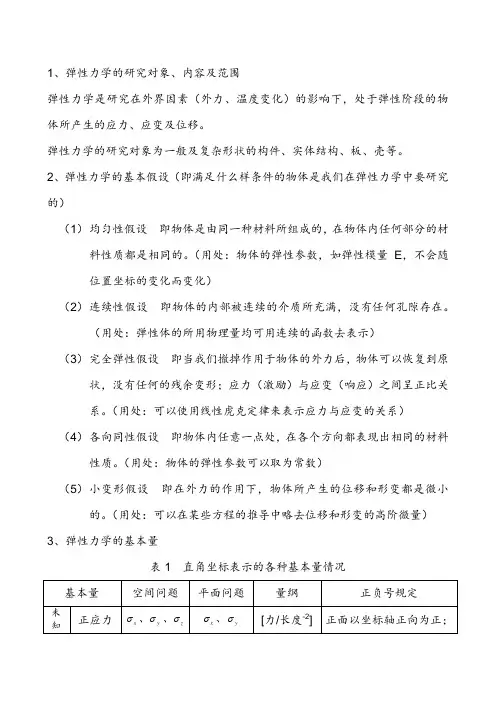
1、弹性力学的研究对象、内容及范围弹性力学是研究在外界因素(外力、温度变化)的影响下,处于弹性阶段的物体所产生的应力、应变及位移。
弹性力学的研究对象为一般及复杂形状的构件、实体结构、板、壳等。
2、弹性力学的基本假设(即满足什么样条件的物体是我们在弹性力学中要研究的)(1)均匀性假设即物体是由同一种材料所组成的,在物体内任何部分的材料性质都是相同的。
(用处:物体的弹性参数,如弹性模量E,不会随位置坐标的变化而变化)(2)连续性假设即物体的内部被连续的介质所充满,没有任何孔隙存在。
(用处:弹性体的所用物理量均可用连续的函数去表示)(3)完全弹性假设即当我们撤掉作用于物体的外力后,物体可以恢复到原状,没有任何的残余变形;应力(激励)与应变(响应)之间呈正比关系。
(用处:可以使用线性虎克定律来表示应力与应变的关系)(4)各向同性假设即物体内任意一点处,在各个方向都表现出相同的材料性质。
(用处:物体的弹性参数可以取为常数)(5)小变形假设即在外力的作用下,物体所产生的位移和形变都是微小的。
(用处:可以在某些方程的推导中略去位移和形变的高阶微量)3、弹性力学的基本量表1 直角坐标表示的各种基本量情况4、两类平面问题的概念(1)平面应力问题(应力是平面的;变形是空间的)如图所示薄板,其z方向的尺寸比其他两个方向上的尺寸小得多;外力和体力都平行于板面,并且沿着板的厚度没有变化,这样的问题称为平面应力问题。
(2)平面应变问题若物体在z方向的尺寸比在其他两个方向上的尺寸大得多,如图所示很长的坝体,外力及体力沿着z方向没有变化,则这类问题称为平面应变问题。
(3)两类平面问题的一些特征空间问题的基本未知量共有8个,每个基本未知量仅仅是坐标(),x y的函数。
表2 两类平面问题的一些特征5、平面问题的基本方程平面问题的基本方程包括:(1)平衡方程;(2)几何方程;(3)物理方程 平面问题的基本量有8个,分别是:3个应力分量:x σ、y σ、xy τ; 3个形变分量:x ε、y ε、xy γ; 2个位移分量:u 、v(1)平衡方程平衡方程描述的是体力分量与应力分量之间的关系0yxx x f x yτσ∂∂++=∂∂; 0xy y y f x y τσ∂∂++=∂∂ 上述平衡方程对于平面应力问题和平面应变问题均适用 (2)几何方程几何方程描述的是形变分量与位移分量之间的关系x ux ε∂=∂;y v y ε∂=∂;xy v u x y γ∂∂=+∂∂ (3)物理方程物理方程描述的是形变分量与位移分量之间的关系平面应力问题的物理方程为: 平面应变问题的物理方程为: 6、平面问题的边界条件弹性力学问题的边界条件,简单的说就是用来描述弹性体边界上所受的外部作用。
![NiTi合金的超弹性力学特性及其应用(王心美[等]著)PPT模板](https://uimg.taocdn.com/335f45beaf1ffc4fff47ac38.webp)
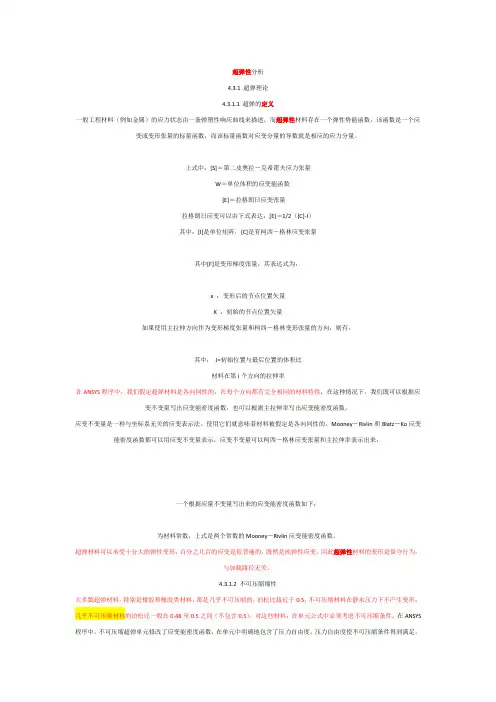
超弹性分析4.3.1 超弹理论4.3.1.1 超弹的定义一般工程材料(例如金属)的应力状态由一条弹塑性响应曲线来描述,而超弹性材料存在一个弹性势能函数,该函数是一个应变或变形张量的标量函数,而该标量函数对应变分量的导数就是相应的应力分量。
上式中:[S]=第二皮奥拉-克希霍夫应力张量W=单位体积的应变能函数[E]=拉格朗日应变张量拉格朗日应变可以由下式表达:[E]=1/2([C]-I)其中:[I]是单位矩阵,[C]是有柯西-格林应变张量其中[F]是变形梯度张量,其表达式为:x :变形后的节点位置矢量X :初始的节点位置矢量如果使用主拉伸方向作为变形梯度张量和柯西-格林变形张量的方向,则有:其中: J=初始位置与最后位置的体积比材料在第i个方向的拉伸率在ANSYS程序中,我们假定超弹材料是各向同性的,在每个方向都有完全相同的材料特性,在这种情况下,我们既可以根据应变不变量写出应变能密度函数,也可以根据主拉伸率写出应变能密度函数。
应变不变量是一种与坐标系无关的应变表示法。
使用它们就意味着材料被假定是各向同性的。
Mooney-Rivlin和Blatz-Ko应变能密度函数都可以用应变不变量表示,应变不变量可以柯西-格林应变张量和主拉伸率表示出来:一个根据应量不变量写出来的应变能密度函数如下:为材料常数,上式是两个常数的Mooney-Rivlin应变能密度函数。
超弹材料可以承受十分大的弹性变形,百分之几百的应变是很普遍的,既然是纯弹性应变,因此超弹性材料的变形是保守行为,与加载路径无关。
4.3.1.2 不可压缩缩性大多数超弹材料,特别是橡胶和橡胶类材料,都是几乎不可压缩的,泊松比接近于0.5,不可压缩材料在静水压力下不产生变形,几乎不可压缩材料的泊松比一般在0.48至0.5之间(不包含0.5),对这些材料,在单元公式中必须考虑不可压缩条件。
在ANSYS 程序中,不可压缩超弹单元修改了应变能密度函数,在单元中明确地包含了压力自由度。
弹性力学讲课文档contents •弹性力学基本概念与原理•弹性力学分析方法•一维问题求解方法与应用•二维问题求解方法与应用•三维问题求解方法与应用•弹性力学在工程中应用案例目录01弹性力学基本概念与原理弹性力学定义及研究对象定义弹性力学是研究弹性体在外力作用下产生变形和内部应力分布规律的科学。
研究对象主要研究弹性体(如金属、岩石、橡胶等)在小变形条件下的力学行为。
弹性体基本假设与约束条件基本假设连续性假设、完全弹性假设、小变形假设、无初始应力假设。
约束条件弹性体在变形过程中,必须满足几何约束(如位移连续、无重叠等)和物理约束(如应力平衡、应变协调等)。
应力单位面积上的内力,表示物体内部各部分之间的相互挤压或拉伸作用。
应变物体在外力作用下产生的形状和尺寸的变化,反映物体变形的程度。
位移物体上某一点在变形前后位置的变化,描述物体的整体移动。
关系应力与应变之间存在线性关系(胡克定律),位移是应变的积分结果。
应力、应变及位移关系弹性力学中能量原理能量守恒原理弹性体在变形过程中,外力所做的功等于弹性体内部应变能的增加。
最小势能原理在所有可能的位移场中,真实位移场使系统总势能取最小值。
虚功原理外力在虚位移上所做的虚功等于内力在相应虚应变上所做的虚功。
02弹性力学分析方法解析法分离变量法通过分离偏微分方程的变量,将其转化为常微分方程进行求解。
积分变换法利用积分变换(如傅里叶变换、拉普拉斯变换等)将偏微分方程转化为常微分方程或代数方程进行求解。
复变函数法引入复变函数,将弹性力学问题转化为复平面上的问题,利用复变函数的性质进行求解。
将连续问题离散化,用差分方程近似代替微分方程进行求解。
有限差分法有限元法边界元法将连续体划分为有限个单元,对每个单元进行分析并建立单元刚度矩阵,然后组装成整体刚度矩阵进行求解。
将边界划分为有限个单元,利用边界积分方程进行求解,适用于处理无限域和复杂边界问题。
半解析法有限体积法将计算区域划分为一系列控制体积,将待解的微分方程对每一个控制体积积分得出离散方程进行求解。
基本载荷作用下橡胶类材料的超弹性力学性能分析桑建兵;刘彦勇;邢素芳;王静远;付双建【摘要】基于有限变形的基本理论,对基本载荷作用下橡胶类材料的超弹性力学性能进行了分析.在高玉臣所提出的橡胶类材料的本构模型的基础上,给出了1种新的不可压缩超弹性应变能函数.引入参数α,当n=l且oα=l时,新模型转化为Mooney-Rivlin模型,而当n=l且α=0时,新模型转化为Neo-Hookean模型.利用新的本构关系对橡胶类材料在单轴拉伸以及受内压膨胀2种基本载荷作用下的超弹性力学性能进行了研究,分析了本构参数对单轴拉伸和内压膨胀的影响,指出本构参数n为材料的强化参数,橡胶圆管受内压膨胀时存在失稳现象,其稳定性不仅依赖于本构参数n而且与本构参数α相关.%Based on the finite deformation theory,analysis of hyper elastic mechanical property on rubber like materials under basic load has been proposed.A new constitutive model modified from Gao's second constitutive model has been introduced by utilizing the finite deformation theory.In the circumstance that material is incompressible,when and,the new constitutive relation may be simplified to Mooney-Rivlin model;when and,the new constitutive relation may be simplified to Neo-Hookean model.By utilizing the new constitutive relation,super elastic mechanical properties of the rubber materials has been researched under basic loads,which include the uniaxial tension and inflation under internal pressure.The influence of constitutive parameters has been analyzed,which has been pointed out that is the intensive parameter of the materials.Rubber tube has the phenomenon of instabilityunder internal pressure.Its stability is not only dependent on the constitutive parameter but also related to the c onstitutive parameter α.【期刊名称】《河北工业大学学报》【年(卷),期】2017(046)002【总页数】6页(P36-41)【关键词】橡胶类材料;本构关系;有限变形理论;单轴拉伸;内压膨胀【作者】桑建兵;刘彦勇;邢素芳;王静远;付双建【作者单位】河北工业大学机械工程学院,天津,300130;河北工业大学机械工程学院,天津,300130;河北工业大学机械工程学院,天津,300130;河北工业大学机械工程学院,天津,300130;河北工业大学机械工程学院,天津,300130【正文语种】中文【中图分类】U465从20世纪40年代开始,弹性材料的有限变形理论得到了很大的发展.所得出的有意义理论结果和许多实验验证的结果被广泛地应用于描述橡胶类材料的物理行为和工程领域.弹性材料有限变形的数学理论的本质是非线性的,在理论和应用中所遇到的数学方面的困难是可想而知的.近年来,有许多力学工作者用数学和数值分析方法对许多有限弹性理论的非线性问题和技术难题进行了研究.在研究中,人们越来越认识到建立反映橡胶类材料变形特征本构模型是解决问题的核心,选取简单而适用的描述橡胶类材料的本构模型,决定着数值分析方法的精确性和得出结果的可用性[1-5].目前,人们越来越关注橡胶类材料本构模型的建立,1948年Rivlin[6]从唯象学的角度出发提出了针对各向同性超弹性材料应变能函数:其中:为材料的本构参数;和分别为右Cauchy-Green变形张量的第1和第2不变量.取得到满足此应变能函数的Mooney-Rivlin本构模型.Mooney-Rivlin本构模型由于形式简单,容易通过实验进行验证,因此在工程上有着广泛的应用.在长期的研究中积累了大量的理论和实验结果,为后续的新本构模型的建立奠定了基础.该模型能较好拟合不可压缩橡胶材料小变形和中等应变范围的材料力学行为,但不能精确的描述产生硬化现象的橡胶类材料的力学行为以及描述在大变形中应力-应变曲线的“陡升”行为,为了解决这些问题,人们构造对数型和幂指数型的本构模型[8-9].1997年高玉臣[10]从材料的抗拉和抗压角度,给出一种橡胶类材料的应变能函数,并基于此本构模型对橡胶类材料的裂尖场进行了分析.然而,在不可压缩条件下,此应变能函数既不能简化为Neo-Hookean材料,也不能简化为Mooney-Rivlin 材料.这影响着应变能函数应用的实验基础.高玉臣基于此本构模型对橡胶缺口与刚性楔体之间的大变形接触问题,集中力作用下橡胶楔体的拉伸问题,橡胶类材料的界面裂纹,大应变弹性体的应力以及奇异性进行了分析[11-14].Long R[15]基于此本构模型对软弹性体的裂尖场进行了准大变形分析.Sang JB[16]对此本构模型进行了修正,基于有限变形理论对含空洞圆形橡胶薄膜的大变形问题进行了分析.在本文中,借鉴高玉臣的本构模型,建立一个描述不可压缩橡胶类材料的新的本构模型.当n=1且α =0时,新模型转化为Neo-Hookean模型,而当n=1且α=1时,新模型转化为Mooney-Rivlin模型.通过对均匀变形进行分析和计算,考察了新模型的合理性和适用性.给出橡胶类材料的单轴拉伸以及橡胶圆管受内压膨胀两个特例,讨论了两个本构参数对材料行为的影响.1997年高玉臣给出应变能函数[10]:基于有限变形理论可得Cauchy应力张量的表达式为其中:B是左Cauchy-Green变形张量;分为B的3个不变量;A和n为材料参数;从式(2)可以看出,此应变能函数显然不满足应变能函数W(3,3,1)=0的条件.对于不可压缩材料,当n=1时,次本构模型即不能简化为Neo-Hookean 材料,也不能简化为Mooney-Rivlin材料.基于本构模型式(2),对不可压缩橡胶类材料,给出了修正后的应变能函数其中:为材料参数,反映了I2对应力分布的影响;为初始构型中橡胶类材料的密度.由有限变形弹性理论和式(4),对各向同性不可压缩超弹性材料Cauchy应力张量的表达式为其中:为单位张量为静水压力,在自然构形中式(5)本构关系可记为对于不可压缩性材料,在自然构形中,也是任意的标量函数.显然,式(6)满足其中:是“非确定性应力”;D为应变率张量;对不可压缩性材料对于新的本构模型式(4)的合理性,做如下讨论.首先,式(4)满足在刚性条件下,这意味着参考构形是自然构形.其次β1和β2满足∂β1/∂I2+∂β2/∂I1=0即材料是超弹性的.再次,1975年Batra提出对各向同性材料进行单轴拉伸时,其本构模型需满足经验不等式,β1>0,β2≤0,Rivlin、Saunders和Treloar等人的试验数据都说明这个经验不等式是成立的,显然,由式(7)可以看出,当A>0,n>0,α≥0时,β1≥0;β2≤0成立.最后讨论新的本构模型是否满足Baker-Ericksen不等式,这是1962年由Truesdell和Noll提出的.对于各向同性材料,较大的主应力应该产生在较大的主伸长[1],即考察平面应力条件下的双向拉伸.设初始构形的笛卡尔坐标用描述,即时构形的笛卡尔坐标变形模式满足其中表示i方向的主伸长.不变量的表达式为不可压缩条件为由平面应力条件由方程(5)可得由不可压缩条件(11)得到即对于条件(9)成立.综上所述,将方程(4)作为描述不可压缩橡胶类材料的应变能函数从而建立材料的本构方程具有合理性.为不失一般性,考虑一个有限变形材料的立方单元体.如图1所示.在方向上受作用.变形模式满足:其中主伸长为是坐标的正交基矢量.变形梯度和左Cuachy-Green变形张量分别为由本构关系式(5)可得分量形式由于不可压缩条件结合式(17),拉伸应力表示为得式(18)建立了之间关系的表达式.在小变形条件下,即(ε为小变形应变),式(18)可简化为其中为小变形条件下的杨氏模量.为了讨论本构参数α和n对材料力学性能的影响,引入无量纲化的作用力F/A,由方程(18)得出:对方程(20)的计算结果由图2和图3给出.对于给定的如图2所示)在单轴拉伸情形下,随着本构参数n增加,应力增大,明显的具有强化特征,因此可认为n是材料的强化参数.从图2可以看出,当n=1.4出现在大变形中应力-应变曲线的“陡升”行为;从图3中可以看出,α控制了I2对于材料变形和应力的影响,对于给定的n= 1.2,α的增加,使应力增加,但影响的效果较强化参数n的影响的效果小.取参考坐标系为柱坐标,表示变形前的柱坐标分量,变形前其内、外半径分别为A 和B.在内压力P的作用下,变形后的坐标分量分别用r、θ、z表示,且其内、外半径分别为a和b.则变形模式为其中,代表轴向的主伸长比.定义各主伸长量分别为则变形梯度用矩阵表示为:由于变形是不可压缩的,所以有由此得出橡胶圆管径向、环向以及轴向方向的主伸长分别为其左柯西-格林应变张量以及3个应变不变量可表示为由式(5)可以得到各Cauchy应力分量为其中对于自由膨胀由此可得将式(27)代入式(26)可得:在柱坐标系下,不计体力的影响,并由轴对称条件得到径向平衡方程为此时橡胶圆管的径向边界条件为:为内部压力),利用此边界条件,从而得到式(29)的积分形式为将式(31)代入式(30)可得膨胀压力的表达式为其中假设橡胶圆管为薄壁管,定义且由于材料的不可压缩性,经推导可得将式(33)代入式(32),经过化简可得将膨胀压力P进行无量纲化处理可得其中:图5显示了当时,材料参数关系曲线的影响,当n取较小值时,橡胶圆管具有较大的环向主伸长,表示橡胶圆管的膨胀能力较强,韧性较好;当n取较大值时,橡胶圆管具有较小的环向主伸长,表明橡胶圆管的硬化程度较高,且随着n的增加,内压增加明显,具有明显的强化特征.尤其当时,橡胶圆管出现了失稳现象.图6显示了当时,材料参数关系曲线的影响,α控制了对于材料I2变形的影响,随着α的增加,内压相应地增加,但影响的效果较强化参数n的影响效果小.基于有限变形的基本理论,对高玉臣所提出的橡胶类材料的本构模型进行修改,给出1个新的不可压缩超弹性应变能函数.由于引入参数α和n,使描述材料的模型具有更大的实用范围.当n=1且α=0时,新的本构模型转化为Neo-Hookean模型,而当n=1且α=1时,转化为Mooney-Rivlin模型.对于橡胶类材料的单轴拉伸,给定本构参数α,随着本构参数n增加,应力增大,明显的具有强化特征,当n=1.4出现在大变形中应力-应变曲线的“陡升”行为;给定本构参数n,α控制了I2对于材料变形和应力的影响,对于给定的n=1.2,随着α的增加,应力相应的也会增加,但影响的效果较强化参数n的影响的效果小.对于橡胶圆管受内压膨胀问题,固定α和λz,当n取较小值时,橡胶圆管具有较大的环向主伸长,表示橡胶圆管的膨胀能力较强,韧性较好,尤其当n<1时,橡胶软管出现了失稳现象.当n取较大值时,橡胶圆管具有较小的环向主伸长,随着n的增加,内压增加明显,具有明显的强化特征;固定n和λz,α同样控制了I2对于材料变形的影响,随着α的增加,内压相应地增加,但影响的效果较强化参数n的影响效果小.【相关文献】[1]Beatty M F.Topics in finite elasticity:hyperelasticity of rubber,elastomer,and biological tissues-with example[J].Applied Mechanics Review,1987,40(12):1699-1734.[2]Fuzhang Zhao.Continuum constitutive modeling for isotropic hyperelasticmaterials[J].Advances in Pure Mathematics,2016,6,571-582.[3]EhretAE.OnamolecularstatisticalbasisforOgden'smodelofrubberelasticity[J].Journal ofthe Mechanics and Physics of Solids,2015,78:249-268.[4]Yükseler R F.A theory for rubber-like rods[J].International Journal of Solids&Structures,2015,69-70:350-359.[5]Li F,Liu J,Yang H,et al.Numerical simulation and experimental verification of heat build-up for rubber compounds[J].Polymer,2016,101:199-207.[6]Rivlin R rge elastic deformations of isotropic materials.ii.some uniqueness theorems for pure,homogeneous deformation[J].Philosophical Transactions of the Royal Society B Biological Sciences,1948,240(822):491-508.[7]黄筑平.连续介质力学基础[M].北京:高等教育出版社,2003.[8]Gent A N.A new constitutive ralation for rubber[J].Rubber Chemistry and Technology.1996,69(1):59-61.[9]Horgan C O,Saccomandi G.A molecular-statistical basis for the Gent constitutivemodel of rubber elasticity[J].J Elasticity,2002,68(1):167-176.[10]Gao Y rge deformation field near a crack tip in rubber-likematerial[J].Theoretical&Applied Fracture Mechanics,1997,26(3):155-162.[11]Gao Y C,Gao T rge deformation contact of a rubber notch with a rigidwedge[J].International Journal of Solids and Structures,2000,37(32):4319-4334. [12]Gao Y C,Chen S H.Analysis of a rubber cone tensioned by a concentratedforce[J].Mechanics Research Communications,2001,28(1):49-54.[13]Gao Y C.Analysis of the interface crack for rubber-like materials[J].Journal of Elasticity,2002,66(1):1-19.[14]Gao Y C,Jin M,Dui G S.Stresses,singularities,and a complementary energy principle for large strain elasticity[J].Applied Mechanics Reviews,2011,61(61):683-695.[15]Long R,Hui C Y.Crack tip fields in soft elastic solids subjected to large quasi-static deformation-A review[J].Extreme Mechanics Letters,2015,4:131-155.[16]Sang JB,Xing SF,Tian HY et al.Research on mechanical properties of a polymer membrane with a void based on the finite deformation theory[J].e-Polymers,2015,15(5):293-299.。