数控车床对刀及建立工件坐标系的几种方法
- 格式:doc
- 大小:1.43 MB
- 文档页数:14
在进行加工之前,数控车床要进行对刀操作,以便确保产品加工的精度以及准度,在实际进行生产的过程中,数控车床对刀的操作有试切对刀和机外对刀仪这两种对刀方法,但是在进行对刀操作的时候也会出现一些问题,下面我们就来具体介绍一下数控车床对刀的操作步骤。
1、试切对刀试切对刀主要用在建立加工坐标系。
在安装好工件后,为了可以加工出需要的加工件,要将编程原点设定为加工原点,建立加工坐标系,用来确定刀具和工件的相对位置,使刀具按照编程轨迹进行运动,最终加工出所需零件。
试切对刀的步骤主要有:(1)选择机床的手动操作模式;(2)启动主轴,试切工件外圆,保持X方向不移动;(3)停主轴,测量出工件的外径值;(4)选择机床的MDI操作模式;(5)按下“off set sitting”按钮;(6)按下屏幕下方的“坐标系”软键;(7)光标移至“G54”;(8)输入X及测量的直径值;(9)按下屏幕下方的“测量”软键;(10)启动主轴,试切工件端面,保持Z方向不移动;2、机外对刀仪对刀机外对刀仪对刀需要将显微对刀仪固定于车床上,用于建立刀具之间的补偿值。
但是因为刀具尺寸会有一定差别,机床中刀位点的坐标值也会因此而出现不同。
如果不设立刀具之间的补偿值,运行相同的程序时就不可能加工出相同的尺寸,想要保证运行相同的程序时,运用不同的刀具得出相同的尺寸,则需要建立刀具间的补偿。
机外对刀仪对刀的步骤主要有:(1)移动基准刀,让刀位点对准显微镜的十字线中心;(2)将基准刀在该点的相对位置清零,具体操作是选择相对位置显示;(3)将其刀具补偿值清零,具体操作是按下“off set sitting”按钮,按下屏幕下方的“补正”软键,选择“形状”,在基准刀相对应的刀具补偿号上输入Xo、Zo;(4)选择机床的手动操作模式,移出刀架,换刀;(5)使其刀位点对准显微镜的十字线中心;(6)选择机床的MDI操作模式;(7)设置刀具补偿值,具体操作是按下“offset sitting”按钮,按下屏幕下方的“补正”软键,选择“形状”,在相对应的刀补号上输入X、Z;(8)移出刀架,执行自动换刀指令即可。
机床七种对刀方式详解
机床刀具的对刀方式是在加工过程中调整和固定刀具位置的方法。
以下是机床常见的七种对刀方式的详细解释:
1.手动对刀:这是最基本的对刀方式之一,操作人员通过手动调整刀具位置,使其与工件对准。
这需要一定的经验和技巧,但适用于简单的对刀需求。
2.摆放法对刀:该方法使用特殊的对刀座,通过摆放工件和刀具来对准它们的位置。
操作人员通过观察对刀座上的刻度线或标记,调整刀具位置以实现对刀。
3.铣刀对刀:这种对刀方式适用于铣床,通过安装专用的对刀仪表,使铣刀与工件表面接触,然后调整刀具位置,使其与工件表面平行或垂直。
4.辅助刀具对刀:在一些复杂的加工过程中,使用辅助刀具来辅助对刀。
辅助刀具可以是特殊设计的夹具、校正块或辅助工具,用于确保刀具位置的准确性。
5.激光对刀:这是一种高精度的对刀方式,使用激光仪器来实现对刀。
激光束投射到工件上,操作人员通过调整刀具位置,使激光与工件表面对齐。
6.触发式对刀:这种对刀方式适用于带有自动对刀装置的机床。
装置会检测刀具与工件的接触,并自动调整刀具位置,以实现精确的对刀。
7.数控对刀:数控机床配备了先进的数控系统,可以通过输入坐标和参数来实现自动对刀。
操作人员只需输入正确的数值,机床就能自动调整刀具位置,确保准确的对刀。
这些对刀方式在不同的机床和加工需求下有不同的应用。
选择适当的对刀方式可以提高加工效率和加工质量,确保刀具和工件之间的准确对准。
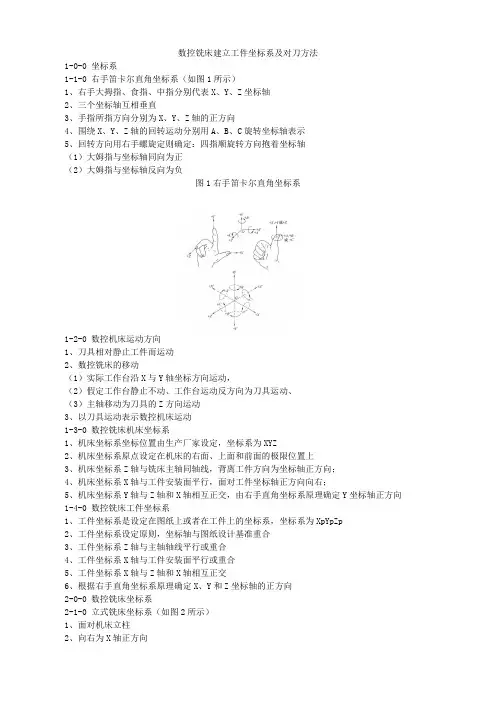
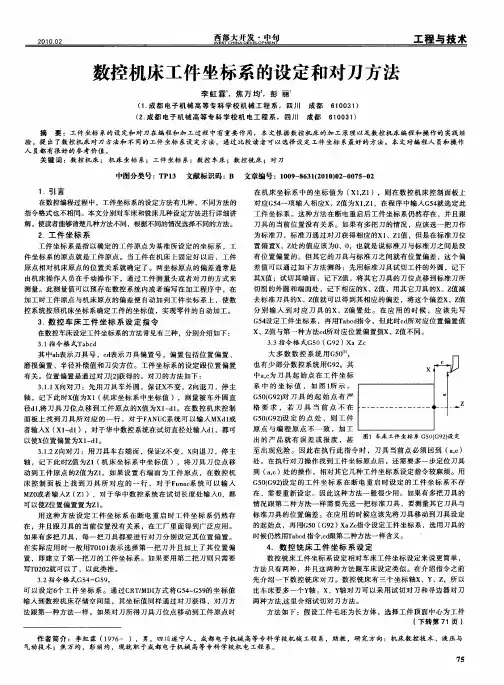
数控铣床建立工件坐标系及对刀方法1-0-0 坐标系1-1-0 右手笛卡尔直角坐标系(如图1所示)1、右手大拇指、食指、中指分别代表X、Y、Z坐标轴2、三个坐标轴互相垂直3、手指所指方向分别为X、Y、Z轴的正方向4、围绕X、Y、Z轴的回转运动分别用A、B、C旋转坐标轴表示5、回转方向用右手螺旋定则确定:四指顺旋转方向抱着坐标轴(1)大姆指与坐标轴同向为正(2)大姆指与坐标轴反向为负图1右手笛卡尔直角坐标系1-2-0 数控机床运动方向1、刀具相对静止工件而运动2、数控铣床的移动(1)实际工作台沿X与Y轴坐标方向运动,(2)假定工作台静止不动、工作台运动反方向为刀具运动、(3)主轴移动为刀具的Z方向运动3、以刀具运动表示数控机床运动1-3-0 数控铣床机床坐标系1、机床坐标系坐标位置由生产厂家设定,坐标系为XYZ2、机床坐标系原点设定在机床的右面、上面和前面的极限位置上3、机床坐标系Z轴与铣床主轴同轴线,背离工件方向为坐标轴正方向;4、机床坐标系X轴与工件安装面平行,面对工件坐标轴正方向向右;5、机床坐标系Y轴与Z轴和X轴相互正交,由右手直角坐标系原理确定Y坐标轴正方向1-4-0 数控铣床工件坐标系1、工件坐标系是设定在图纸上或者在工件上的坐标系,坐标系为XpYpZp2、工件坐标系设定原则,坐标轴与图纸设计基准重合3、工件坐标系Z轴与主轴轴线平行或重合4、工件坐标系X轴与工件安装面平行或重合5、工件坐标系X轴与Z轴和X轴相互正交6、根据右手直角坐标系原理确定X、Y和Z坐标轴的正方向2-0-0 数控铣床坐标系2-1-0 立式铣床坐标系(如图2所示)1、面对机床立柱2、向右为X轴正方向3、向前为Y轴正方向4、向上为Z轴正方向图2 立式铣床坐标系2-2-0 卧式数控铣床坐标系(如图3所示)1、背对机床立柱(操作数控卧式铣床占具的位置,便于观察刀具对工件的切削加工)2、向右为X轴正方向3、向前为Y轴正方向4、向上为Z轴正方向图3 卧式铣床坐标系3-0-0 板坯零件工件坐标系3-1-0 对称轮廓板坯零件工件坐标系3-1-1 对称轮廓板坯零件建立工件坐标系方法1、工件轮廓左、右面和前、后面分别对称2、工件轮廓最高点为工件坐标系Z坐标原点3、工件坐标系原点为左右对称面交线与工件上表面的交点3-1-2 对刀法建立工件坐标系(如图4所示、刀位尺寸如表1所示)图4 对刀法建立工件坐标系表1刀位尺寸【X】=221X X+【Y】=221YY+【Z】=Z3-1-3工件坐标系与机床坐标系相互位置关系(如表2所示)表2 工件坐标系与机床坐标系相互位置关系3-2-0 非对称轮廓板坯零件工件坐标系3-2-1 非对称轮廓板坯零件建立工件坐标系方法1、工件轮廓上表面的前侧为X坐标轴2、工件轮廓上表面的左侧为Y坐标轴3、工件轮廓上表面为Z坐标轴原点3-2-2 对刀法建立工件坐标系(如图5所示)图5 非对称轮廓板坯零件工件坐标系【X】=X+2D【Y】=Y+2D【Z】=Z3-2-3工件坐标系与机床坐标系相互位置关系(如表3所示)表3 工件坐标系与机床坐标系相互位置关系4-0-0 盘类零件工件坐标系(如图6所示)4-1-0 盘类零件建立工件坐标系方法1、工件坐标系原点在盘类零件中心上2、工件坐标系原点在盘类零件上表面上图6盘类零件工件坐标系4-2-0 对刀法建立工件坐标系(如图7所示)图7 百分表找准建立工件坐标系4-2-1 X和Y方向对刀1、磁力表座将杠杆百分表吸在机床主轴端面上2、手动操作移动表头使表头压住被测表面3、表头旋转一周,指针跳动量在允许对刀误差内,则认定主轴旋转中心与被测圆柱面中心重合4、记录CRT中X、Y坐标,即为工件坐标系原点在机床坐标系中坐标值4-2-2 Z向对刀1、刀具端面与工件上表面接触2、记录CRT中Z坐标,即为工件坐标系原点在机床坐标系中坐标值4-3-0工件坐标系与机床坐标系相互位置关系(如表4所示)表4 工件坐标系与机床坐标系相互位置关系4-4-0 设定工件坐标系方法1、点击键盘OFFSET/SETTING功能键2、按键盘软键“坐标系”3、选择坐标系4、选择坐标轴5、输入对刀对数(工件坐标系坐标轴原点在机床坐标系中坐标值)5-0-0 G92指令5-1-0 G92指令格式指令格式 G92 X A Y B Z C指令功能通过刀具起点或换刀点位置设定工件坐标系指令说明坐标值A、B与C表示刀具起点或换刀点在工件坐标系中坐标值(如图8所示)图8 起点或换刀点位置设定工件坐标系5-2-0 工件坐标系G92指令应用(如图9所示)1、刀位点在新建坐标系中坐标:20、15、102、坐标的相反坐标:-20、-15、-10为新建坐标系原点相对刀位点的坐标图9 G92指令的应用6-0-0 工件坐标系指令G54~G596-1-0 工件坐标系指令G54~G59格式指令格式 G54~G59指令功能设定工作坐标系指令说明对刀法设定工件坐标系零点在机床坐标系中坐标1、运用坐标平移原理2、偏置机床坐标系原点3、寄存偏移参数在G54~G59指令指定的坐标之中6-2-0 机床坐标系表示工件坐标系(G54~G59)坐标X机床=X G54-G59+X工件Y机床=Y G54-G59+Y工件Z机床=Z G54-G59+Z工件式中X机床、Y机床、Z机床为机床坐标系坐标X G54-G59、Y G54-G59、Z G54-G59为工件坐标系原点在机床坐标系中坐标X工件、Y工件、Z工件为工件在工件坐标系中坐标6-3-0 机床坐标系表示工件坐标系G54~G59与工件坐标系G92坐标X机床=X G54-G59+X G92+X工件Y机床=Y G54-G59+Y G92+Y工件Z机床=Z G54-G59+Z G92+Z工件式中X机床、Y机床、Z机床为机床坐标系坐标X G54-G59、Y G54-G59、Z G54-G59为工件坐标系原点在机床坐标系中坐标X G92、Y G92、Z G92为G92坐标系原点在G54~G59坐标系中坐标X工件、Y工件、Z工件为工件在工件坐标系中坐标6-4-0应用机床坐标系表示工作坐标系坐标(如表5所示)。
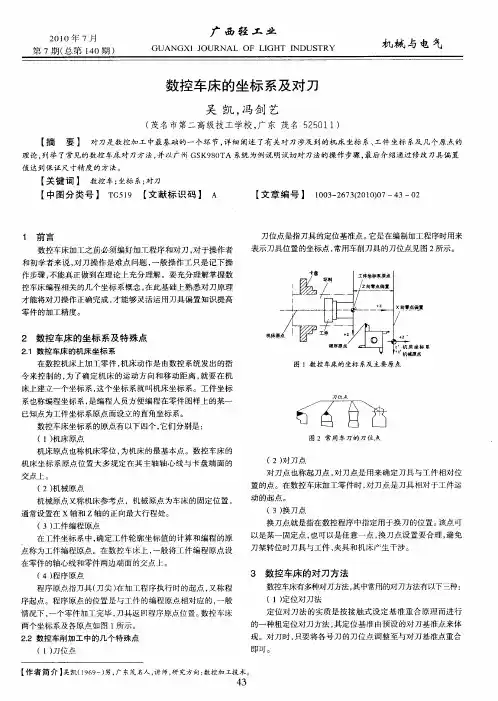
(数控加工)数控车床对刀及建立工件坐标系的方法数控车床对刀及建立工件坐标系的方法摘要:利用数控车床进行零件加工时,开机后,我们先要执行回参考点的操作,以便建立机床坐标系;然后要进行对刀及建立工件坐标系的操作,最后再编制零件的程序且加工。
对刀的准确和否直接会影响后面的加工。
在实际使用中,试切法对刀有三种形式,本文主要介绍这三种对刀形式。
关键字:数控车床机床坐标系工件坐标系试切法对刀正文:在数控车床上加工零件时,我们通常先开机回零,然后安装零件毛坯和刀具,接着要进行对刀和建立工件坐标系的操作,最后才是编制程序和自动加工。
对刀操作的正确和否,直接会影响后续的加工。
对刀有误的话,轻则影响零件的加工精度,重则会造成机床事故。
所以作为数控车床的操作者,首先要掌握对刀及工件坐标系的建立方法。
数控车床上的对刀方法有俩种:试切法对刀和机外对刀仪对刀。
壹般学校没有机外对刀仪这种设备,所以采用试切法对刀。
而根据实际需要,试切法对刀又能够采用三种形式,本文以华中数控HNC-21/T系统为例来阐述这三种形式的对刀及工件坐标系的建立方法。
壹、T对刀T对刀的基本原理是:对于每壹把刀,我们假设将刀尖移至工件右端面中心,记下此时的机床指令X、Z的位置,且将它们输入到刀偏表里该刀的X偏置和Z偏置中。
以后数控系统在执行程序指令时,会将刀具的偏置值加到指令的X、Z坐标中,从而保证所到达的位置正确。
其具体的操作如下:(1)开启机床,释放“急停”按钮,按“回零”,再按“+X”和“+Z”,执行回参考点操作。
(2)按“主轴正转”启动主轴,按“手动”,将刀具移动到合适的位置然后按“-Z”手动车削外圆,最后按“+Z”沿Z向退刀,如图1所示。
(3)按“主轴停止”停止主轴,然后测量试切部分的直径,测得直径为Φ69.934,按“F4(MDI)”,再按“F2(刀偏表)”,将光条移到1号刀的试切直径上,回车,输入69.934,再回车,1号刀的X 偏置会自动计算出来,如图3所示。
![数控FANUC对刀方法及坐标系建立[1]](https://uimg.taocdn.com/95bf8eb9c67da26925c52cc58bd63186bceb922e.webp)
一、基本坐标关系一般来讲,往常使用的有两个坐标系:一个是机械坐标系;此外一个是工件坐标系,也叫做程序坐标系。
在机床的机械坐标系中设有一个固定的参照点(假定为 (X,Z))。
这个参照点的作用主假如用来给机床自己一个定位。
因为每次开机后不论刀架逗留在哪个地点,系统都把目前地点设定为(0,0),这样必然造成基准的不一致,因此每次开机的第一步操作为参照点回归(有的称为回零点 ),也就是经过确立 (X,Z)来确定原点 (0,0)。
为了计算和编程方便,我们往常将程序原点设定在工件右端面的展转中心上,尽量使编程基准与设计、装置基准重合。
机械坐标系是机床独一的基准,因此一定要弄清楚程序原点在机械坐标系中的地点。
这往常在接下来的对刀过程中达成。
二、对刀方法1.试切法对刀试切法对刀是实质中应用的最多的一种对刀方法。
下边以采纳 MITSUBISHI 50L 数控系统的 RFCZ12车床为例,来介绍详细操作方法。
工件和刀具装夹完成,驱动主轴旋转,挪动刀架至工件试切一段外圆。
而后保持 X 坐标不变挪动 Z 轴刀具走动工件,丈量出该段外圆的直径。
将其输入到相应的刀具参数中的刀长中,系统会自动用刀具目前 X 坐标减去试切出的那段外圆直径,即获取工件坐标系 X 原点的地点。
再挪动刀具试切工件一端端面,在相应刀具参数中的刀宽中输入Z0,系统会自动将此时刀具的 Z 坐标减去方才输入的数值,即得工件坐标系 Z 原点的地点。
比如, 2#刀刀架在 X 为150.0 车出的外圆直径为25.0,那么使用该把刀具切削时的程序原点X 值为150.0-25.0=125.0;刀架在 Z 为180.0 时切的端面为 0,那么使用该把刀具切削时的程序原点Z 值为180.0-0=180.0。
分别将 (125.0,180.0)存入到 2#刀具参数刀长中的 X 与 Z 中,在程序中使用 T02 就能够成功成立出工件坐标系。
事实上,找工件原点在机械坐标系中的地点其实不是求该点的实质地点,而是找刀尖点抵达 (0,0)时刀架的地点。
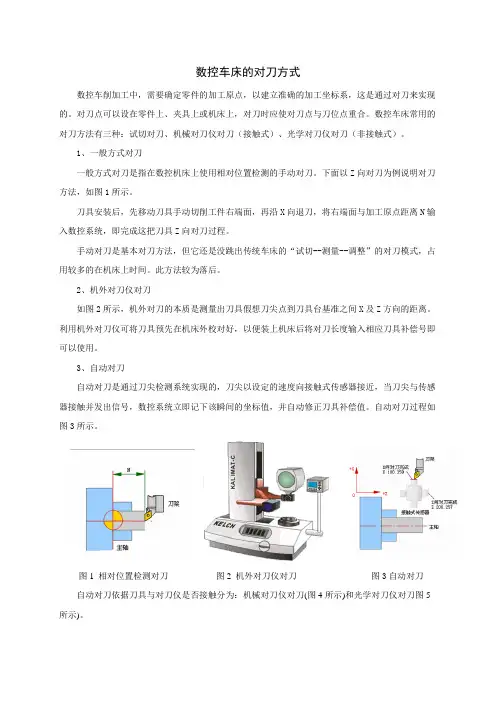
数控车床的对刀方式
数控车削加工中,需要确定零件的加工原点,以建立准确的加工坐标系,这是通过对刀来实现的。
对刀点可以设在零件上、夹具上或机床上,对刀时应使对刀点与刀位点重合。
数控车床常用的对刀方法有三种:试切对刀、机械对刀仪对刀(接触式)、光学对刀仪对刀(非接触式)。
1、一般方式对刀
一般方式对刀是指在数控机床上使用相对位置检测的手动对刀。
下面以Z向对刀为例说明对刀方法,如图1所示。
刀具安装后,先移动刀具手动切削工件右端面,再沿X向退刀,将右端面与加工原点距离N输入数控系统,即完成这把刀具Z向对刀过程。
手动对刀是基本对刀方法,但它还是没跳出传统车床的“试切--测量--调整”的对刀模式,占用较多的在机床上时间。
此方法较为落后。
2、机外对刀仪对刀
如图2所示,机外对刀的本质是测量出刀具假想刀尖点到刀具台基准之间X及Z方向的距离。
利用机外对刀仪可将刀具预先在机床外校对好,以便装上机床后将对刀长度输入相应刀具补偿号即可以使用。
3、自动对刀
自动对刀是通过刀尖检测系统实现的,刀尖以设定的速度向接触式传感器接近,当刀尖与传感器接触并发出信号,数控系统立即记下该瞬间的坐标值,并自动修正刀具补偿值。
自动对刀过程如图3所示。
图1 相对位置检测对刀图2 机外对刀仪对刀图3自动对刀自动对刀依据刀具与对刀仪是否接触分为:机械对刀仪对刀(图4所示)和光学对刀仪对刀图5所示)。
机械对刀仪对刀
光学对刀仪对刀。
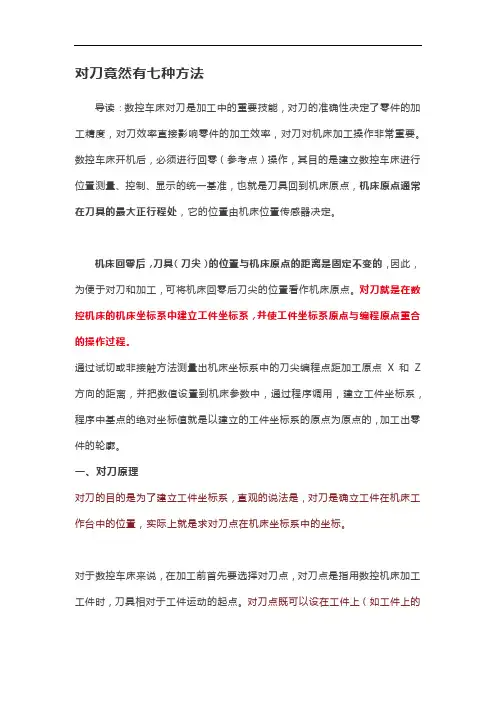
对刀竟然有七种方法导读:数控车床对刀是加工中的重要技能,对刀的准确性决定了零件的加工精度,对刀效率直接影响零件的加工效率,对刀对机床加工操作非常重要。
数控车床开机后,必须进行回零(参考点)操作,其目的是建立数控车床进行位置测量、控制、显示的统一基准,也就是刀具回到机床原点,机床原点通常在刀具的最大正行程处,它的位置由机床位置传感器决定。
机床回零后,刀具(刀尖)的位置与机床原点的距离是固定不变的,因此,为便于对刀和加工,可将机床回零后刀尖的位置看作机床原点。
对刀就是在数控机床的机床坐标系中建立工件坐标系,并使工件坐标系原点与编程原点重合的操作过程。
通过试切或非接触方法测量出机床坐标系中的刀尖编程点距加工原点X和Z 方向的距离,并把数值设置到机床参数中,通过程序调用,建立工件坐标系,程序中基点的绝对坐标值就是以建立的工件坐标系的原点为原点的,加工出零件的轮廓。
一、对刀原理对刀的目的是为了建立工件坐标系,直观的说法是,对刀是确立工件在机床工作台中的位置,实际上就是求对刀点在机床坐标系中的坐标。
对于数控车床来说,在加工前首先要选择对刀点,对刀点是指用数控机床加工工件时,刀具相对于工件运动的起点。
对刀点既可以设在工件上(如工件上的设计基准或定位基准),也可以设在夹具或机床上,若设在夹具或机床上的某一点,则该点必须与工件的定位基准保持一定精度的尺寸关系。
对刀时,应使指刀位点与对刀点重合,所谓刀位点是指刀具的定位基准点,对于车刀来说,其刀位点是刀尖。
对刀的目的是确定对刀点(或工件原点)在机床坐标系中的绝对坐标值,测量刀具的刀位偏差值。
对刀点找正的准确度直接影响加工精度。
在实际加工工件时,使用一把刀具一般不能满足工件的加工要求,通常要使用多把刀具进行加工。
在使用多把车刀加工时,在换刀位置不变的情况下,换刀后刀尖点的几何位置将出现差异,这就要求不同的刀具在不同的起始位置开始加工时,都能保证程序正常运行。
为了解决这个问题,机床数控系统配备了刀具几何位置补偿的功能,利用刀具几何位置补偿功能,只要事先把每把刀相对于某一预先选定的基准刀的位置偏差测量出来,输入到数控系统的刀具参数补正栏指定组号里,在加工程序中利用T指令,即可在刀具轨迹中自动补偿刀具位置偏差。
题目:数控车床的对刀、坐标系确定及数控加工编程技巧毕业论文(设计)任务书论文题目:数控车床的对刀、坐标系确定及数控加工编程巧学号:姓名:专业:数控技术指导教师:系主任:一、主要内容及基本要求:数控车床对刀基本方法,建立合理工件坐标系,要求数控加工可获得精度高、质量德定的产品,因而在机械制造领城得到了越来越广泛的应角,数控编程是应用数控机床进行零件加工的前提,因而如何合理地编制数控程序成为数控加工的关健。
二.重点研究的问题:数控车床虽然加工柔性比普通车床优越,但单就某一种零件的生产效率而言,与普通车床还存在一定的差距。
因此,提高数控车床的效率便成为关键,而合理运用编程技巧,编制高效率的加工程序,对提高机床效率往往具有意想不到的效果。
三、进度安排序号各阶段完成的内容完成时间1 论文名称 09年2月23日2 摘要及关键词 09年2月23日3 正文 09年2月28日4 参考文献 09年3月1日5 封面 09年3月2日6 毕业论文任务书 09年3月3日7 学生登记表 09年3月3日四、应收集的资料及主要参考文献资料: 1.车床与车削运动2.刀具材料和切削用量3.数控编程的方法主要参考文献: 1车工工艺与技能训练2 数控机床的编程3 机械制造工艺基础五、文献综述1.车工工艺与技能训练车工工艺是根据技术上先进、经济上合理的原则,研究将毛坯车削合成格工件的加工方法和过程的一门学科,是广大车工人员和科技作者在长期的车削实践中不断总结、长期积累、逐渐升华而成的专业理论知识。
本课程的任务是使学生获得中级车工应具备的专业理论,具体要求如下:(1)了解常用车床的结构、性能和传统,掌握常用车厂的调整方法,掌握车削的有关计算。
(2)了解车工常用工具和量具的结构,熟练掌握其使用方法。
掌握常用刀具的使用方法,能合理地选择切削用量和切削液。
(3)能合理地选择工件饿定位基准和中等复杂工件的装夹方法,掌握常用车床夹具的结构原理。
能独立制定中等复杂工件的车削工艺,并能根据实际情况采用先进工艺。
数控建立工件坐标的方法宝子!今天咱来唠唠数控建立工件坐标那点事儿。
在数控加工里啊,工件坐标可重要啦。
那怎么建立呢?有一种方法是通过对刀来实现。
就像是给机床的刀具和工件之间牵红线呢。
你得把刀具慢慢靠近工件,直到刚刚好接触到工件的表面。
这个时候啊,机床就知道这个点的位置啦,就像是给这个点做了个特殊的标记。
比如说在铣床上,你要铣一个小零件,刀具接触到零件的一个角,这个角的坐标就可以作为工件坐标的一个基准点。
还有哦,有的数控系统可以直接输入已知的工件尺寸和位置数据来建立坐标。
这就像是你告诉机床,“小机机,这个工件就在这个地方,按照这个尺寸来加工就行啦。
”不过呢,这种方法得保证你输入的数据超级准确,要是错了一点,那加工出来的工件可能就成了个小怪物啦。
另外呢,在一些比较高级的数控设备上,有那种自动测量和建立工件坐标的功能。
就像是机床自己长了眼睛一样,它能通过一些传感器之类的东西,自动探测到工件的位置和形状,然后就把工件坐标建立起来了。
这可太酷了,就像有个小助手在旁边帮你干活。
不过呀,不管用哪种方法,都得小心谨慎呢。
要是工件坐标建立错了,那后面的加工可就全乱套了。
就好比你要盖房子,地基都打歪了,房子能盖好才怪呢。
而且在建立坐标的过程中,要多检查几遍,就像检查自己的小宝贝有没有带齐东西出门一样。
咱建立工件坐标的时候啊,也得根据实际的加工需求来。
如果是加工一些复杂的曲面,可能就需要更精确、更多的坐标点来保证加工的精度。
要是加工简单的小方块之类的,可能就相对简单一些。
总之呢,数控建立工件坐标虽然听起来有点复杂,但只要你多摸索,多实践,就像玩游戏打怪升级一样,慢慢就会掌握得很好啦。
宝子,加油哦,相信你一定能把这个小技能拿捏得死死的!。
数控编程与操作智慧树知到课后章节答案2023年下内蒙古机电职业技术学院内蒙古机电职业技术学院第一章测试1.安装在车床主轴上的专用夹具有()。
A:顶尖 B:四爪单动卡盘 C:心轴 D:三爪卡盘答案:三爪卡盘2.对刀装置就是将刀具的()置于对刀点上,以便建立工件坐标系。
A:主切削刃 B:刀位点 C:换刀点 D:起刀点答案:刀位点3.数控车床对刀方法有几种()。
A:2 B:4 C:3 D:1答案:34.数控车床常用的对刀方法是()。
A:G92 B:G54 C:对刀仪 D:试切法答案:对刀仪5.刀尖点在数控机夹刀具中是否真实存在()。
A:否 B:是答案:否6.数控外圆精加工刀具,常用刀片角度是多少度()。
A:75 B:35 C:55 D:80答案:357.下列数控系统()是数控车床应用的控制系统A:SIEMENS820G B:HNC818B C:GSK980M D:HNC818A 答案:HNC818A8.数控车床Z轴对刀时试车后只能沿()轴方向退刀A:Z B:先X再Z数 C:X D:X、Z都可以答案:X9.安装数控车刀时,刀具一般伸出刀具的多长合适()A:其余选项均不正确 B:2/3 C:1/3答案:1/310.数控车床X轴对刀时试车后只能沿()轴方向退刀。
A:X B:先X再Z数 C:X、Z都可以 D:Z答案:Z第二章测试1.主轴正转的命令是()。
A:M06 B:M04 C:M05 D:G03答案:M052.数控机床的旋转轴之一B轴是绕()旋转的轴。
A:W轴 B:Z轴 C:Y轴 D:X轴答案:Y轴3.根据ISO标准,数控机床在编程时采用()规则。
A:按坐标系确定 B:工件相对静止,刀具运动 C:刀具相对静止,工件运动 D:按实际运动情况确定答案:刀具相对静止,工件运动4.数控机床的编程基准是()。
A:机床参考点及工件原点 B:编程原点 C:机床原点 D:机床参考点答案:编程原点5.程序结束并复位指令是()。
数控车床对刀及建立工件坐标系的方法摘要:利用数控车床进行零件加工时,开机后,我们先要执行回参考点的操作,以便建立机床坐标系;然后要进行对刀及建立工件坐标系的操作,最后再编制零件的程序并加工。
对刀的准确与否直接会影响后面的加工。
在实际使用中,试切法对刀有三种形式,本文主要介绍这三种对刀形式。
关键字:数控车床机床坐标系工件坐标系试切法对刀正文:在数控车床上加工零件时,我们通常先开机回零,然后安装零件毛坯和刀具,接着要进行对刀和建立工件坐标系的操作,最后才是编制程序和自动加工。
对刀操作的正确与否,直接会影响后续的加工。
对刀有误的话,轻则影响零件的加工精度,重则会造成机床事故。
所以作为数控车床的操作者,首先要掌握对刀及工件坐标系的建立方法。
数控车床上的对刀方法有两种:试切法对刀和机外对刀仪对刀。
一般学校没有机外对刀仪这种设备,所以采用试切法对刀。
而根据实际需要,试切法对刀又可以采用三种形式,本文以华中数控HNC-21/T系统为例来阐述这三种形式的对刀及工件坐标系的建立方法。
一、T对刀T对刀的基本原理是:对于每一把刀,我们假设将刀尖移至工件右端面中心,记下此时的机床指令X、Z的位置,并将它们输入到刀偏表里该刀的X偏置和Z偏置中。
以后数控系统在执行程序指令时,会将刀具的偏置值加到指令的X、Z坐标中,从而保证所到达的位置正确。
其具体的操作如下:(1)开启机床,释放“急停”按钮,按“回零”,再按“+X”和“+Z”,执行回参考点操作。
(2)按“主轴正转”启动主轴,按“手动”,将刀具移动到合适的位置然后按“-Z”手动车削外圆,最后按“+Z”沿Z向退刀,如图1所示。
(3)按“主轴停止”停止主轴,然后测量试切部分的直径,测得直径为Φ69.934,按“F4(MDI)”,再按“F2(刀偏表)”,将光条移到1号刀的试切直径上,回车,输入69.934,再回车,1号刀的X偏置会自动计算出来,如图3所示。
图1 图2 (4)移动刀具到合适的位置,按“主轴正转”启动主轴,按“手动”,然后按“-X”手动车削端面,最后按“+X”沿X向退刀,如图2所示。
数控机床对刀步骤方法数控机床对刀是加工过程中非常重要的一项操作,正确的对刀方法可以有效提高加工精度和效率。
下面将介绍数控机床对刀的步骤方法。
步骤一:准备工作在进行数控机床对刀之前,需要做好充分的准备工作。
首先要检查机床的各个部件是否正常,包括主轴、夹具、刀具等部件,确保机床处于正常工作状态。
同时,准备好刀具,工件以及测量工具等。
步骤二:装夹刀具将待对刀的刀具装夹到主轴上,并严密固定好。
确保刀具与主轴安装良好,不会出现松动等情况。
步骤三:设定工件坐标通过数控系统,设定工件坐标系原点。
根据加工图纸和要求,确定工件坐标系的原点位置,包括X、Y、Z三个方向的坐标值。
步骤四:机床坐标系和工件坐标系的转换通过数控系统,将机床坐标系和工件坐标系进行转换。
根据实际情况,设置机床坐标系和工件坐标系之间的关系,确保刀具可以准确的定位到工件上。
步骤五:对刀操作1.在数控系统中选择对刀功能,并按照系统指引操作。
2.通过手动操纵主轴,使刀具对准工件表面。
3.使用对刀仪或感应器,检测刀具与工件表面的距离,调整刀具位置,直至刀具与工件表面接触。
4.确认刀具正确对准工件,并锁紧刀具。
步骤六:校准刀具偏移量根据实际情况,通过数控系统,校准刀具的偏移量。
根据实际加工需要,调整刀具的偏移量,确保加工准确。
步骤七:完成对刀验证刀具对准工件的准确性,确认刀具位置无误后,完成对刀操作。
可以进行后续的加工工序。
数控机床对刀是数控加工过程中的一项关键工序,正确的对刀方法可以有效提高加工精度和效率。
希望通过以上步骤方法的介绍,能够帮助操作人员更好地进行数控机床对刀操作。
数控操作中对刀的操作方法
数控操作中的对刀操作通常有以下几种方法:
1. 使用对刀仪进行自动对刀:首先将对刀仪夹在主轴上,并将刀具安装在主轴上。
然后通过数控系统的操作界面进入对刀模式,按照系统提示进行操作,待系统自动完成对刀后即可。
2. 使用对刀仪进行手动对刀:与自动对刀类似,将对刀仪夹在主轴上,并将刀具安装在主轴上。
但是此时需要手动操作对刀仪,根据对刀仪上的刻度调整刀具位置,使其与对刀仪相匹配。
3. 使用机床自带的对刀功能:某些数控机床具备对刀功能,可以通过机床的操作界面进行对刀操作。
通常需要将一个特殊的对刀卡具夹在主轴上,将对刀杆插入对刀卡具中,然后根据机床操作界面的指示进行操作。
4. 手动对刀:如果没有对刀仪或对刀功能,可以通过手动对刀的方法进行操作。
先将刀具装在主轴或刀架上,然后通过微调手轮或手柄调整刀具位置,使其与工件表面平行或垂直。
无论采用哪种方法,对刀时需要注意以下几点:
- 保证刀具的安全性:在对刀过程中,要确保刀具及其夹持装置的牢固性,以防
止刀具在对刀过程中脱落或变形。
- 调整刀具位置:根据对刀操作的目的,调整刀具位置使其与工件表面保持适当的距离。
通常情况下,刀具与工件表面之间的间隙应越小越好,以确保加工精度。
- 确认刀具位置:在完成对刀操作后,应使用测量工具如千分尺或高度规等测量刀具与工件表面的距离,以确认刀具位置是否准确。
- 记录刀具位置:为了方便后续的加工操作,应将对刀后刀具的坐标位置记录下来,为下次对刀时提供参考。
数控车床对刀及建立工件坐标系的方法在数控车床上加工零件时,我们通常先开机回零,然后安装零件毛坯和刀具,接着要进行对刀和建立工件坐标系的操作,最后才是编制程序和自动加工。
对刀操作的正确与否,直接会影响后续的加工。
对刀有误的话,轻则影响零件的加工精度,重则会造成机床事故。
所以作为数控车床的操作者,首先要掌握对刀及工件坐标系的建立方法。
数控车床上的对刀方法有两种:试切法对刀和机外对刀仪对刀。
一般学校没有机外对刀仪这种设备,所以采用试切法对刀。
而根据实际需要,试切法对刀又可以采用三种形式,本文以华中数控HNC-21/T系统为例来阐述这三种形式的对刀及工件坐标系的建立方法。
一、T对刀T对刀的基本原理是:对于每一把刀,我们假设将刀尖移至工件右端面中心,记下此时的机床指令X、Z的位置,并将它们输入到刀偏表里该刀的X偏置和Z 偏置中。
以后数控系统在执行程序指令时,会将刀具的偏置值加到指令的X、Z 坐标中,从而保证所到达的位置正确。
其具体的操作如下:(1)开启机床,释放“急停”按钮,按“回零”,再按“+X”和“+Z”,执行回参考点操作。
(2)按“主轴正转”启动主轴,按“手动”,将刀具移动到合适的位置然后按“-Z”手动车削外圆,最后按“+Z”沿Z向退刀,如图1所示。
(3)按“主轴停止”停止主轴,然后测量试切部分的直径,测得直径为Φ69.934,按“F4(MDI)”,再按“F2(刀偏表)”,将光条移到1号刀的试切直径上,回车,输入69.934,再回车,1号刀的X偏置会自动计算出来,如图3所示。
图1 图2(4)移动刀具到合适的位置,按“主轴正转”启动主轴,按“手动”,然后按“-X”手动车削端面,最后按“+X”沿X向退刀,如图2所示。
(5)按“主轴停止”停止主轴,将光条移到1号刀的试切长度上,回车,输入0,再回车,1号刀的Z偏置会自动计算出来,如图3所示。
图32号刀的对刀过程与1号刀类似,只不过不能切端面。
具体如下:(1)按“刀位转换”将2号刀换到切削位置,按“主轴正转”启动主轴,按“手动”,将刀具移动到合适的位置然后按“-Z”手动车削外圆,最后按“+Z”沿Z向退刀,如图4所示。
(2)按“主轴停止”停止主轴,然后测量2号刀试切部分的直径,测得直径为Φ65.980,将光条移到2号刀的试切直径上,回车,输入65.980,再回车,2号刀的X偏置会自动计算出来,如图6所示。
(3)按“主轴正转”启动主轴,按“手动”,然后按“-Z”手动继续车削外圆,最后按“+X”沿X向退刀,如图5所示。
(4)按“主轴停止”停止主轴,测量2号刀的试切长度,得33.087,将光条移到2 号刀的试切长度上,回车,输入-33.087,再回车,2号刀的Z偏置会自动计算出来,如图6所示。
如果还有3号和4号刀具,其对刀方法与2号刀具是一样的,这里不再赘述。
图4 图5图6使用T对刀需要注意两点:(1)G54~G59这六个坐标系的坐标原点都要设成(0,0),后面将会讲述。
(2)程序中,每一把刀具在使用前,都应该用T指令调用相应的刀偏,如T0101,T0202等。
二、G54~G59对刀G54~G59又称零点偏置指令,它是将机床坐标系偏移一定的距离来建立工件坐标系。
其具体操作如下:(1)按“刀位转换”将1号刀换到加工位置上,按“主轴正转”启动主轴,按“手动”,将刀具移动到合适的位置然后按“-Z”手动车削外圆,最后按“+Z”沿Z向退刀,如图1所示。
(2)按“主轴停止”停止主轴,然后测量1号刀试切部分的直径,测得直径为Φ69.934,则半径为34.967。
记下机床指令位置的X值,为-185.034。
那么工件轴线在机床坐标系下的X坐标为X=-185.034-34.967=-220.001。
(3)按“主轴正转”启动主轴,按“手动”,将刀具移动到合适位置,然后按“-X”手动车削端面,最后按“+X”沿X向退刀,如图2所示。
(4)按“主轴停止”停止主轴,记下机床指令位置的Z坐标Z=-103.167,这表示工件右端面在机床坐标系下的Z坐标Z=-103.167。
(5)按“F10(返回)”返回顶层菜单,按“F4(MDI)”,再按“F4(坐标系)”,进入自动坐标系G54的界面,在MDI的提示下输入“X-220.001 Z-103.167”,如图7所示。
(6)按回车,结果G54的界面就会显示“X-220.001 Z-103.167”,如图8所示。
图7图82号刀的对刀过程与1号刀类似,只不过不能切端面。
具体如下:(1)按“刀位转换”将2号刀换到切削位置,按“主轴正转”启动主轴,按“手动”,将刀具移动到合适的位置然后按“-Z”手动车削外圆,最后按“+Z”沿Z向退刀,如图4所示。
(2)按“主轴停止”停止主轴,然后测量2号刀试切部分的直径,测得直径为Φ65.980,则半径为32.990。
记下机床指令位置的X值,为-108.99。
那么工件轴线在机床坐标系下的X坐标为X=-108.99-32.99=-141.980。
(3)按“主轴正转”启动主轴,按“手动”,然后按“-Z”手动继续车削外圆,最后按“+X”沿X向退刀,如图5所示。
(4)按“主轴停止”停止主轴,测量2号刀的试切长度,得33.087。
记下机床指令位置的Z值,为-70.559。
那么工件右端面在机床坐标系下的Z坐标Z=-70.559-33.087=-103.646。
(5)按“F10(返回)”返回顶层菜单,按“F4(MDI)”,再按“F4(坐标系)”,进入自动坐标系G54的界面,按“PgDn”键进入G55的界面,在MDI的提示下输入“X-141.980 Z-103.646”,按回车,结果G55的界面就会显示“X-141.980 Z-103.646”,如图9所示。
如果还有3号和4号刀具,其对刀方法与2号刀具是一样的,这里不再赘述。
使用G54~G59对刀需要注意以下几点:(1)刀偏表中所有刀具的X偏置和Z偏置都要设为0。
这是因为如果采用G54~G59进行了零点偏移,而同时在刀偏表中设置了刀具偏置,程序执行时会进行双重偏置,系统会产生超程报警,不予执行。
图9(2)程序中,每一把刀具在使用前,都应该用G54~G59指令调用相应的工件坐标系,如:%0001G54 (调用G54坐标系)M03 S800 T0101 (用1号刀)…………G55 (调用G55坐标系)T0202 (用2号刀)…………M30 (程序结束)三、G92设定工件坐标系上面介绍的T对刀和G54~G59对刀都是在程序执行之前手动进行的。
我们也可以在程序执行的过程中动态地建立工件坐标系,这就要用到G92指令。
它的格式是G92 Xα Zβ。
其原理是:以刀具当前位置为基准,建立一个坐标系,使得刀尖在该坐标系下的坐标值是(α,β)。
用法如下:(1)按“刀位转换”将1号刀换到加工位置上,按“主轴正转”启动主轴,按“手动”,将刀具移动到合适的位置然后按“-Z”手动车削外圆,最后按“+Z”沿Z向退刀。
(2)按“主轴停止”停止主轴,然后测量1号刀试切部分的直径,测得直径为Φ69.934,则半径为34.967。
记下机床指令位置的X值,为-185.034。
那么工件轴线在机床坐标系下的X坐标为X=-185.034-34.967=-220.001。
(3)按“主轴正转”启动主轴,按“手动”,将刀具移动到合适位置,然后按“-X”手动车削端面,最后按“+X”沿X向退刀。
(4)按“主轴停止”停止主轴,记下机床指令位置的Z坐标Z=-103.167,这表示工件右端面在机床坐标系下的Z坐标Z=-103.167。
(5)按“F10(返回)”返回顶层菜单,按“F4(MDI)”,再按“F6(MDI运行)”,在MDI方式下,逐行输入以下程序段。
每输入一行后敲回车,并按“循环启动”。
M03 S600(主轴正转,转速600r/min)G53 G90 G01 Z-103.167 F100(直接机床坐标系编程,刀具移动到工件右端平面上)G53 G90 G01 X-220.001 F100(直接机床坐标系编程,刀具移动到工件右端面中心,如图10)G91 G00 X100 Z50(相对编程,刀具相对右端面中心,沿X正向移动100,Z正向移动50,如图11、图12)M05(主轴停止)图10 图11进行以上操作后,编写程序时,程序开头应该有G92 X100 Z50。
例如:%0002G92 X100 Z50M03 S600……G00 X100 Z50M30图12使用G92应该注意以下问题:(1)G92只是在程序开头动态建立工件坐标系,实际系统执行该指令时,刀具并不产生动作。
(2)使用G92时,1号刀的X偏置和Z偏置都要设为0,G54~G59这六个坐标系的X和Z也都要设为0。
(3)MDI方式下将刀具移动到(100,50)后,在程序执行前不要再手动移动刀具。
(4)程序结束前,应该将刀具移动到(100,50)的位置。
否则下次执行程序时会产生偏移。
(5)本例中只给了一把刀具,如果有几把刀具,则其它刀具的X偏置和Z 偏置只能设置为相对于1号刀的相对刀偏。
至于怎么设置,本文不作深入讨论,有兴趣的读者可以自行研究。
四、结论对刀方法灵活多样,初学者容易迷惑。
建议初学者开始只使用T对刀,等慢慢熟练后,再试用另外两种方法并且掌握它们。
这样,我们就可以根据不同的场合需要而采用相应的对刀方法。