工件坐标系的确定
- 格式:doc
- 大小:73.50 KB
- 文档页数:2
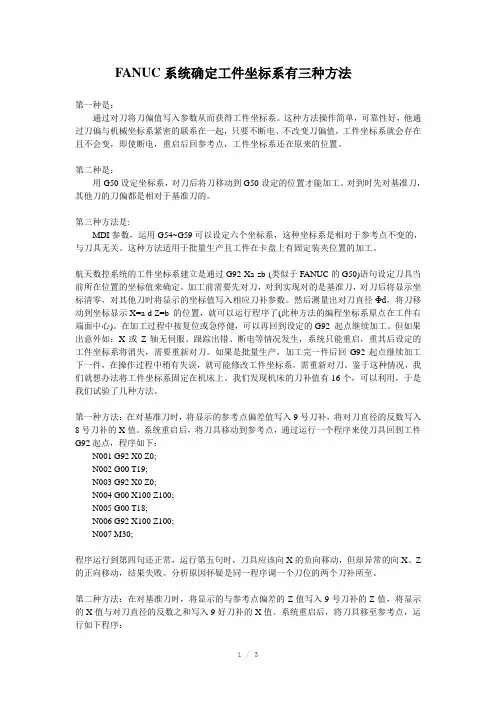
FANUC系统确定工件坐标系有三种方法第一种是:通过对刀将刀偏值写入参数从而获得工件坐标系。
这种方法操作简单,可靠性好,他通过刀偏与机械坐标系紧密的联系在一起,只要不断电、不改变刀偏值,工件坐标系就会存在且不会变,即使断电,重启后回参考点,工件坐标系还在原来的位置。
第二种是:用G50设定坐标系,对刀后将刀移动到G50设定的位置才能加工。
对到时先对基准刀,其他刀的刀偏都是相对于基准刀的。
第三种方法是:MDI参数,运用G54~G59可以设定六个坐标系,这种坐标系是相对于参考点不变的,与刀具无关。
这种方法适用于批量生产且工件在卡盘上有固定装夹位置的加工。
航天数控系统的工件坐标系建立是通过G92 Xa zb (类似于FANUC的G50)语句设定刀具当前所在位置的坐标值来确定。
加工前需要先对刀,对到实现对的是基准刀,对刀后将显示坐标清零,对其他刀时将显示的坐标值写入相应刀补参数。
然后测量出对刀直径Фd,将刀移动到坐标显示X=a-d Z=b 的位置,就可以运行程序了(此种方法的编程坐标系原点在工件右端面中心)。
在加工过程中按复位或急停健,可以再回到设定的G92 起点继续加工。
但如果出意外如:X或Z轴无伺服、跟踪出错、断电等情况发生,系统只能重启,重其后设定的工件坐标系将消失,需要重新对刀。
如果是批量生产,加工完一件后回G92起点继续加工下一件,在操作过程中稍有失误,就可能修改工件坐标系,需重新对刀。
鉴于这种情况,我们就想办法将工件坐标系固定在机床上。
我们发现机床的刀补值有16个,可以利用,于是我们试验了几种方法。
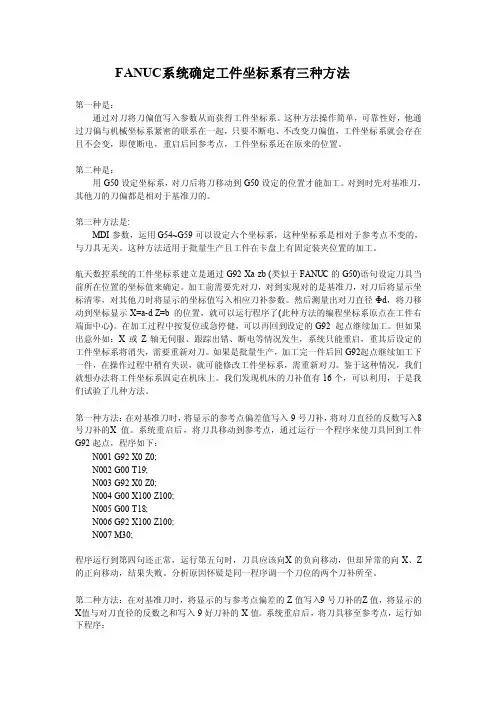
第一种方法:在对基准刀时,将显示的参考点偏差值写入9号刀补,将对刀直径的反数写入8号刀补的X值。
系统重启后,将刀具移动到参考点,通过运行一个程序来使刀具回到工件G92起点,程序如下:N001 G92 X0 Z0;N002 G00 T19;N003 G92 X0 Z0;N004 G00 X100 Z100;N005 G00 T18;N006 G92 X100 Z100;N007 M30;程序运行到第四句还正常,运行第五句时,刀具应该向X的负向移动,但却异常的向X、Z 的正向移动,结果失败。
六点法定义工具坐标系的步骤一、引言在工程领域中,工具坐标系是一种基本的坐标系,用于定义工具或工件在机床上的位置和姿态。
通过建立工具坐标系,可以准确描述机床中工具的位置、方向和姿态,从而实现精确的加工和定位。
本文将介绍以六点法定义工具坐标系的步骤,以帮助读者更好地理解和应用这一方法。
二、确定基准点确定基准点是定义工具坐标系的第一步。
基准点是工具坐标系的原点,通常选择机床上的一个固定点作为基准点。
在选择基准点时,需要考虑其稳定性和易于测量的特点。
三、确定X轴方向确定X轴方向是定义工具坐标系的第二步。
X轴是工具坐标系的一个重要方向,它通常与机床上的一个固定轴线平行。
在确定X轴方向时,可以选择机床上的一个固定轴线,如工作台的移动方向。
四、确定Z轴方向确定Z轴方向是定义工具坐标系的第三步。
Z轴是工具坐标系的另一个重要方向,它垂直于X轴和Y轴。
在确定Z轴方向时,可以选择机床上的一个固定轴线,如主轴的旋转轴线。
五、确定Y轴方向确定Y轴方向是定义工具坐标系的第四步。
Y轴是工具坐标系的剩余方向,它与X轴和Z轴垂直。
在确定Y轴方向时,可以选择机床上的一个固定轴线,如机床的进给方向。
六、确定坐标正负方向确定坐标正负方向是定义工具坐标系的最后一步。
在确定坐标正负方向时,需要考虑工具坐标系与机床坐标系之间的转换关系。
通常情况下,X轴正方向指向机床坐标系的正方向,Y轴正方向与机床坐标系的正方向相同,而Z轴正方向则与机床坐标系的负方向相反。
通过以上六个步骤,就可以完整地定义一个工具坐标系。
在实际应用中,可以通过测量和计算来确定工具坐标系的各个参数,如基准点的坐标和坐标轴的方向。
定义好工具坐标系后,就可以根据需要进行加工和定位,实现精确的工艺要求。
总结通过以上六点法定义工具坐标系的步骤,可以准确地描述工具或工件在机床上的位置和姿态。
这一方法在工程领域中得到广泛应用,对于实现精确的加工和定位非常重要。
在实际应用中,需要仔细选择基准点和确定坐标轴的方向,以确保工具坐标系的准确性和稳定性。
简述abb工业机器人工件坐标系的设定步骤和作用
ABB工业机器人工件坐标系的设定步骤和作用包括以下几个步骤:
1. 定义基坐标系:首先需要确定一个基坐标系,通常是机器人的参考点或固定的机器人坐标系。
2. 定义工件坐标系:根据实际需求,通过机器人的示教器或者编程进行操作,选取一个合适的位置和方向,定义一个工件坐标系,通常是相对于基坐标系的。
3. 设置工件坐标系的原点:确定工件坐标系的原点位置,可以是工件的中心点或者其他合适的位置。
4. 设置工件坐标系的方向:确定工件坐标系的方向,通常可以通过朝向工件的某个参考点或者参照工件的特征来确定。
5. 确认工件坐标系:经过以上步骤设定好工件坐标系后,需要进行确认,确认无误后将坐标系保存。
工件坐标系的作用主要有以下几个方面:
1. 操作参考:通过设定工件坐标系,机器人可以根据该坐标系进行定位和操作,方便操作者进行编程和示教。
2. 补偿校准:通过工件坐标系的设定,可以实现机器人对工件的补偿校准。
例如,如果工件位置发生微小偏差,可以通过调
整工件坐标系来实现对偏差的修正。
3. 工具坐标系的设定:在某些情况下,需要将工具的坐标系与工件坐标系进行关联。
通过设定工件坐标系,可以方便地设定工具的坐标系,以实现更精确的操作。
总的来说,ABB工业机器人工件坐标系的设定步骤和作用可以帮助机器人实现精确的操作和补偿校准,提高工作效率和质量。
建立工件坐标系的步骤一、确定基准面和基准点:基准面是建立坐标系的参考平面,通常选择工件上便于加工的平面作为基准面。
基准点是基准面上的确定点,用来确定坐标系的位置。
确定基准面和基准点后,可以用辅助工具(如划线底板、平行仪等)将基准点标记在基准面上。
二、确定坐标轴的方向和顺序:坐标轴是建立坐标系的基准线,它决定了工件坐标系的方向。
常用的坐标轴有X轴、Y轴和Z轴。
在确定坐标轴的方向时,需要考虑三个方向上的运动,以便确保机床能够满足加工的要求。
在确定坐标轴的顺序时,一般采用右手定则,即拇指指向X轴的正方向,食指指向Y轴的正方向,中指指向Z轴的正方向。
三、确定坐标轴的起点和单位:坐标轴的起点是确定坐标系原点的位置,通常选择工件上的其中一明显特征点作为坐标轴的起点。
确定起点后,需要确定坐标轴的单位,即每单位长度所代表的数值。
常用的单位有毫米、厘米和英寸等。
四、绘制坐标系图像:在机械加工过程中,必须将工件坐标系的信息传达给机床控制系统,以便于机床按照给定的坐标进行加工。
绘制坐标系图像是传达坐标系信息的一种常用方式。
绘制坐标系图像时,需要将基准面、基准点、坐标轴方向和起点等信息准确地表示出来。
五、校验坐标系的准确性:建立好的工件坐标系需要经过校验,以确保其准确性。
校验的方法有很多种,一般可以通过测量工件上的几何要素(如尺寸、角度、位置等)来验证坐标系的正确性。
如果测量结果与设计要求相符,则可以认为建立的工件坐标系准确无误。
一般来说,建立工件坐标系的步骤可以概括为:确定基准面和基准点,确定坐标轴的方向和顺序,确定坐标轴的起点和单位,绘制坐标系图像,校验坐标系的准确性。
通过按照以上步骤进行操作,可以确保建立的工件坐标系准确无误,以便机床能按照给定的坐标进行准确的加工。
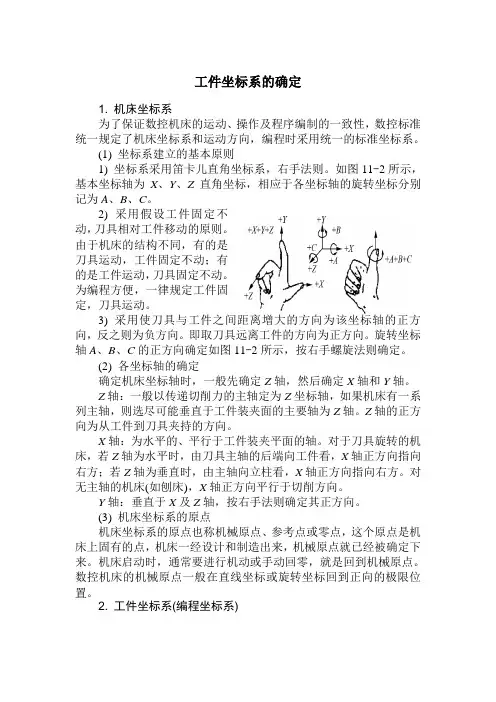
工件坐标系的确定1. 机床坐标系为了保证数控机床的运动、操作及程序编制的一致性,数控标准统一规定了机床坐标系和运动方向,编程时采用统一的标准坐标系。
(1) 坐标系建立的基本原则1) 坐标系采用笛卡儿直角坐标系,右手法则。
如图11-2所示,基本坐标轴为X、Y、Z直角坐标,相应于各坐标轴的旋转坐标分别记为A、B、C。
2) 采用假设工件固定不动,刀具相对工件移动的原则。
由于机床的结构不同,有的是刀具运动,工件固定不动;有的是工件运动,刀具固定不动。
为编程方便,一律规定工件固定,刀具运动。
3) 采用使刀具与工件之间距离增大的方向为该坐标轴的正方向,反之则为负方向。
即取刀具远离工件的方向为正方向。
旋转坐标轴A、B、C的正方向确定如图11-2所示,按右手螺旋法则确定。
(2) 各坐标轴的确定确定机床坐标轴时,一般先确定Z轴,然后确定X轴和Y轴。
Z轴:一般以传递切削力的主轴定为Z坐标轴,如果机床有一系列主轴,则选尽可能垂直于工件装夹面的主要轴为Z轴。
Z轴的正方向为从工件到刀具夹持的方向。
X轴:为水平的、平行于工件装夹平面的轴。
对于刀具旋转的机床,若Z轴为水平时,由刀具主轴的后端向工件看,X轴正方向指向右方;若Z轴为垂直时,由主轴向立柱看,X轴正方向指向右方。
对无主轴的机床(如刨床),X轴正方向平行于切削方向。
Y轴:垂直于X及Z轴,按右手法则确定其正方向。
(3) 机床坐标系的原点机床坐标系的原点也称机械原点、参考点或零点,这个原点是机床上固有的点,机床一经设计和制造出来,机械原点就已经被确定下来。
机床启动时,通常要进行机动或手动回零,就是回到机械原点。
数控机床的机械原点一般在直线坐标或旋转坐标回到正向的极限位置。
2. 工件坐标系(编程坐标系)图11-3 工件坐标系与机床坐标系的位置关系 工件坐标系是由编程人员在编制程序时用来确定刀具和程序的起点,工件坐标系的原点可由编程人员根据具体情况确定,但坐标轴的方向应与机床坐标系一致,并且与之有确定的尺寸关系。
简述工业机器人工件坐标的标定方法以及工件坐标系的作用随着工业机器人在生产领域的应用越来越广泛,工件坐标的准确性和标定成为了至关重要的问题。
工件坐标标定是指确定机器人执行任务时所需的工件坐标与实际工件位置之间的准确关系。
下面我们来详细讨论一下工业机器人工件坐标的标定方法以及工件坐标系的作用。
工业机器人工件坐标的标定方法:1. 基础标定法:将工件放置在已知坐标系中,通过测量机器人末端执行器相对于该已知坐标系的坐标来计算工件坐标系的位置和姿态。
2. 视觉标定法:通过机器视觉系统获取工件的图像信息,利用图像处理算法计算工件的位置和姿态。
3. 可编程标定法:通过程序控制机器人执行一系列特定动作,例如移动、旋转等,然后通过测量工具对机器人末端执行器的坐标进行测量,从而计算出工件坐标系的位置和姿态。
4. 双手协作标定法:利用机器人两只手的力和力矩传感器测量工件的力和力矩,通过对力和力矩的分析和计算,得到工件坐标系的位置和姿态。
工件坐标系的作用:1. 精确定位:工件坐标系的确定可以帮助机器人实现对工件的精确定位,从而有效地进行操作和加工。
2. 姿态控制:工件坐标系可以帮助机器人确定工件的姿态,从而实现准确的操作和加工。
3. 任务规划:工件坐标系可以作为规划的参考,帮助机器人确定路径和动作,从而实现高效的任务规划和执行。
4. 误差补偿:通过对工件坐标系的标定,可以计算出机器人在执行任务时可能存在的误差,从而进行误差补偿,提高生产的准确性和一致性。
5. 自动化生产:工件坐标系的准确标定可以使机器人实现自动化生产,提高生产效率和品质。
在工业机器人应用中,工件坐标的标定方法和工件坐标系的作用至关重要。
通过选择适合的标定方法,并正确理解和利用工件坐标系的作用,可以提高工业机器人的生产效率和准确性,促进制造业的发展。
简述工业机器人工件坐标的标定方法以及工件坐标系的作用工件坐标的标定方法主要包括直接法和间接法两种。
直接法是通过对每个工件的各个特征点进行测量、计算,建立工件的坐标系,一般适用于复杂的工件;间接法是通过对工具或治具的定位基准面进行测量,而间接确定工件的位置,一般适用于简单的工件。
坐标标定的具体步骤主要包括:第一步,选择三个不在一直线上的点作为基准点;第二步,用基准点建立一个局部坐标系;第三步,测量参考点在局部坐标系中的坐标;第四步,测量参考点在世界坐标系中的坐标;第五步,求解两坐标系之间的变换矩阵;第六步,确认变换矩阵的正确性。
这些步骤中,选择基准点和测量参考点的位置是关键环节。
工件坐标系主要用于确定工件的位置和姿态。
在工件上建立一个坐标系,可以方便地描述工件在空间中的位置和方向,这在许多机械制造过程中是必需的,如数控编程、机器人路径规划等。
工件坐标系一般以工件的特征点、特征线或特征面为基准,建立与工件几何形状、尺寸、位置关系密切的坐标系。
通过坐标系,可以实现工件的精确位置定位,从而提高生产效率和加工精度,对于提高产品质量、降低生产成本具有重要意义。
机床坐标系的判定原则机床坐标系的判定原则一、前言机床坐标系是机床加工的基础,其正确性直接影响到加工件的精度和质量。
因此,在进行数控加工时,必须对机床坐标系进行正确的判定和调整。
本文将从坐标系的概念、判定原则、判定方法及调整方法等方面详细介绍机床坐标系的判定原则。
二、坐标系概念1. 坐标系定义在数学中,坐标系是指用来描述空间位置关系的一组规则。
在机床中,坐标系是用来描述机床各轴相对位置关系的一种规则。
2. 坐标轴定义在机床中,通常有三个互相垂直的轴:X轴、Y轴和Z轴。
其中X轴为水平方向,Y轴为纵向方向,Z轴为垂直于X、Y两轴且朝上方向。
三、坐标系判定原则1. 坐标系应满足右手法则右手法则是指当右手拇指指向X轴正方向时,食指指向Y轴正方向,则中指所指方向为Z轴正方向。
因此,在判定机床坐标系时,应满足右手法则。
2. 坐标系应满足左右对称性机床坐标系应满足左右对称性。
即,机床的X轴正方向和负方向应分别对称,Y轴和Z轴同理。
3. 坐标系应满足直角关系机床坐标系中,X、Y、Z三个轴应互相垂直,并且形成直角关系。
4. 坐标系原点的确定机床坐标系原点的确定是十分重要的。
通常情况下,原点都是在工件加工区域内部或边缘上。
在判定时,应确保原点与工件有一定的距离,以避免误差产生。
四、坐标系判定方法1. 利用数控系统进行判定现代数控系统通常都有自动判定坐标系功能。
操作者只需按照系统提示进行操作即可完成坐标系的判定。
2. 利用测量仪器进行判定利用测量仪器可以精确地测量出各轴之间的相对位置关系,并据此确定机床坐标系。
常用的测量仪器有三角板、平板等。
五、坐标系调整方法1. 调整机床各轴的位置在进行加工时,如果发现加工件的误差较大,可以通过调整机床各轴的位置来改善。
具体方法是先通过测量仪器测量出各轴之间的相对位置关系,然后根据需要进行微调。
2. 调整数控系统参数数控系统中有许多参数可以进行调整,如补偿值、校准值等。
操作者可以根据实际情况进行相应的调整,以达到更好的加工效果。
FANUC系统确定工件坐标系有三种方法第一种是:通过对刀将刀偏值写入参数从而获得工件坐标系。
这种方法操作简单,可靠性好,他通过刀偏与机械坐标系紧密的联系在一起,只要不断电、不改变刀偏值,工件坐标系就会存在且不会变,即使断电,重启后回参考点,工件坐标系还在原来的位置。
第二种是:用G50设定坐标系,对刀后将刀移动到G50设定的位置才能加工。
对到时先对基准刀,其他刀的刀偏都是相对于基准刀的。
第三种方法是:MDI参数,运用G54~G59可以设定六个坐标系,这种坐标系是相对于参考点不变的,与刀具无关。
这种方法适用于批量生产且工件在卡盘上有固定装夹位置的加工。
航天数控系统的工件坐标系建立是通过G92Xa zb (类似于FAN UC的G50)语句设定刀具当前所在位置的坐标值来确定。
加工前需要先对刀,对到实现对的是基准刀,对刀后将显示坐标清零,对其他刀时将显示的坐标值写入相应刀补参数。
然后测量出对刀直径Фd,将刀移动到坐标显示X=a-d Z=b 的位置,就可以运行程序了(此种方法的编程坐标系原点在工件右端面中心)。
在加工过程中按复位或急停健,可以再回到设定的G92起点继续加工。
但如果出意外如:X或Z轴无伺服、跟踪出错、断电等情况发生,系统只能重启,重其后设定的工件坐标系将消失,需要重新对刀。
如果是批量生产,加工完一件后回G92起点继续加工下一件,在操作过程中稍有失误,就可能修改工件坐标系,需重新对刀。
鉴于这种情况,我们就想办法将工件坐标系固定在机床上。
我们发现机床的刀补值有16个,可以利用,于是我们试验了几种方法。
第一种方法:在对基准刀时,将显示的参考点偏差值写入9号刀补,将对刀直径的反数写入8号刀补的X值。
工件坐标系标定方法一、工件坐标系标定的重要性。
1.1 这就像给工件找个家。
工件坐标系标定啊,那可是相当重要的事儿。
你可以把每个工件想象成一个小居民,那工件坐标系就是它们的家的地址。
如果这个地址没标定好,就好比居民找不到自己的家了,后续的加工啊、测量啊,就全乱套了。
就像我们平常说的“差之毫厘,谬以千里”,一点点的标定误差,可能导致整个工件的加工或者检测结果完全不对路。
1.2 是精确加工的基础。
在机械加工领域,精确性就如同生命线。
没有准确的工件坐标系标定,就像在黑暗中摸索着前进,不知道方向。
这就好比盖房子,地基要是歪了,房子肯定盖不好。
精确的标定能让机床准确地知道工件的位置和姿态,这样加工出来的工件才能够符合设计要求,达到严丝合缝的效果。
二、常见的标定方法。
2.1 三点标定法。
这个方法就像三角形具有稳定性一样可靠。
选取工件上三个不在同一条直线上的点,通过测量这三个点在机床坐标系中的坐标值,然后经过一定的数学计算,就能确定工件坐标系。
这就像是通过三个柱子来确定一个平面的位置,简单又实用。
比如说在加工一些小型的、形状规则的工件时,三点标定法就像是一把得心应手的小工具,能快速准确地完成标定工作。
2.2 六点标定法。
六点标定法相对来说就更细致一些了。
它就像是给工件做了一个全方位的体检。
选取六个点,这六个点能更全面地描述工件的位置和姿态。
这种方法适合那些形状稍微复杂一点的工件,就好比给一个调皮捣蛋的小孩穿衣服,你得从多个角度去调整才能让衣服穿得合适。
六点标定法能够更精确地确定工件坐标系,减少误差。
2.3 利用基准工装标定。
这就像是找了个中间人来帮忙。
先制作一个高精度的基准工装,这个工装就像一个标准的模特。
把工件和这个基准工装进行特定的装配或者定位,然后根据基准工装在机床坐标系中的位置来确定工件坐标系。
这种方法在一些批量生产、并且工件有特定装配关系的情况下非常好用。
就如同行军打仗时,有个经验丰富的向导带着大家走,不容易迷路。
简述工件坐标系原点的选择原则,并针对数控车床和加工中心具体工件坐标系是数控机床加工中必不可少的一部分,是指建立在工件表面上的坐标系,由三条互相垂直的线确定。
确定坐标系原点的位置十分重要,因为它关系到整个加工过程的准确性和效率。
选取坐标系原点的原则如下:第一步:选择合适的坐标系首先需要明确选取何种类型的坐标系。
数控机床加工中,最主要的是直角坐标系和极坐标系。
直角坐标系是在工件表面上建立的三维坐标系,X、Y、Z轴相互垂直,可以表示工件上任何点的位置。
而极坐标系则是根据工件的外形和加工要求建立的坐标系,适用于某些特定的工件,例如内锥面、圆锥面等等。
第二步:选定坐标系原点的位置- 在数控车床中:如果加工工件的形状不规则或者有很多零部件的话,应该选择工件的结构中心作为坐标系原点。
如果加工工件形状比较规则,就可以选择中心轴线作为坐标系原点。
如果采用了极坐标系,则要根据工件结构选择原点位置。
- 在数控加工中心中:由于加工中心可以在工件上进行多个面的加工,因此,选定坐标系原点应该考虑到工件的多个面,一般应在工件加工后厚度最大处建立坐标系。
第三步:选取坐标轴的方向- 在数控车床中:如果加工工件已经存在的轴线与数控系统坐标轴平行,则应该选择该轴线作为Z轴,X负方向指向工件的前端。
当不存在轴线时,可以通过测量寻找工件的中心,并将中心点作为坐标系原点。
如果采用了极坐标系,则可以通过测量工件外形找出极径和极角的方向。
- 在数控加工中心中:加工中心的坐标轴是由机床制造商事先规定好的,X轴通常指向机头,Y轴指向机车侧面,Z轴垂直工作台,指向上方。
总之,在选择坐标系原点位置和坐标轴方向时,应该根据工件的形状和加工要求进行合理的判断,选择最合适的方案,以保证加工过程中的准确性和效率。
三坐标建立工件坐标系应注意的问题
建立工件坐标系时,需要注意以下问题:
1. 坐标系的原点确定:确定工件坐标系的原点通常是选择一个固定点或特定特征来作为参考点。
这个选取应该便于工件的尺寸和形状以及后续加工过程的测量和操作。
2. 坐标轴方向:确定工件坐标系的坐标轴方向是非常重要的,它会直接影响到坐标系的表示和工件的加工操作。
通常,选择一个合适的方向来表示工件的长度、宽度和高度,并确保坐标轴的正方向与工件的特性相匹配。
3. 坐标轴的单位:确定工件坐标系的坐标轴单位,例如毫米、厘米、英尺等。
这取决于工件的尺寸以及后续加工和测量设备的精度和单位。
4. 坐标轴的面表示:确定坐标系的面表示,即确定哪个面是主面或者参考面。
这对于确定后续加工操作中的方向和位置至关重要。
5. 坐标系的转换和平移:如果需要将工件坐标系与其他坐标系进行转换或平移,则需要确定转换的方法和参数,并确保转换后的坐标系与原始坐标系保持一致。
6. 坐标系的标记和命名:为了方便工艺操作和后续数据分析,对工件坐标系的坐标轴进行标记和命名是必要的。
这可以通过正确的标记和命名来提高工作效率和准确性。
总之,在建立工件坐标系时,需要综合考虑工件特性、加工要求、测量设备和操作习惯等因素,同时确保坐标系的准确性和一致性。
三点法标定工件坐标系原理
三点法标定工件坐标系是一种通过测量工件上的三个点来确定工件坐标系位置的方法。
其原理如下:
1. 确定三个点:首先,在工件上选择三个已知的、不共线的点作为参考点。
这三个点可以是工件的几何中心、边缘或其他具有代表性的点。
2. 测量点坐标:使用测量设备(如激光跟踪仪、三坐标测量机等)测量这三个点的坐标值。
通常,这些坐标值相对于测量设备的坐标系给出。
3. 计算工件坐标系:通过这三个点的坐标值,可以计算出工件坐标系的原点、X轴和Y轴的方向以及Z轴的方向。
这个计算过程通常涉及到数学变换和坐标转换。
4. 应用标定结果:一旦计算出工件坐标系,就可以将工件相对于测量设备的坐标系进行平移和旋转,以获得工件的真实位置和姿态信息。
需要注意的是,三点法标定工件坐标系的精度取决于测量设备的精度以及选择的参考点的精度和代表性。
因此,在实际应用中,需要选择合适的测量设备和参考点,并进行多次测量和校准,以确保标定结果的准确性和可靠性。
建立工件坐标系操作方法
1. 确定工件的中心点:首先需要在工件上找到准确的中心点,通常通过测量来获得。
2. 定位工件:将工件放置在加工设备上,需要解决工件的定位问题,以便确定它的准确位置。
3. 确定坐标轴方向:确定工件坐标系坐标轴的方向。
通常情况下,Z轴方向指向加工设备的刀具,X轴方向垂直于Z轴,而Y轴方向则右手定则决定。
4. 选择初始点:选择一个已知的初始点,在此点上建立工件坐标系,可以选择工件的表面或者边缘作为初始点。
5. 建立坐标系:根据选择的初始点和坐标轴方向,在工件上建立起坐标系,同时需要确定坐标系的原点和各坐标轴与机床相对应的方向。
6. 清除误差:在建立完坐标系后,需要检查误差和校正偏差,确保坐标系的精度和准确性。
7. 确定工件坐标系的起点:确定工件坐标系的起点,这个点被称为工件零点,它通常位于工件的中心点。
建立坐标系后,需要将零点清零,以便计算机控制系统能够准确地计算出坐标位置。
8. 测量并记录工件坐标系:最后需要进行测量并记录工件坐标系,以便后续的加工过程能够按照准确的坐标系进行。
工件坐标系的确定
1. 机床坐标系
为了保证数控机床的运动、操作及程序编制的一致性,数控标准统一规定了机床坐标系和运动方向,编程时采用统一的标准坐标系。
(1) 坐标系建立的基本原则
1) 坐标系采用笛卡儿直角坐标系,右手法则。
如图11-2所示,基本坐标轴为X、Y、Z直角坐标,相应于各坐标轴的旋转坐标分别记为A、B、C。
2) 采用假设工件固定不
动,刀具相对工件移动的原则。
由于机床的结构不同,有的是
刀具运动,工件固定不动;有
的是工件运动,刀具固定不动。
为编程方便,一律规定工件固
定,刀具运动。
3) 采用使刀具与工件之间距离增大的方向为该坐标轴的正方向,反之则为负方向。
即取刀具远离工件的方向为正方向。
旋转坐标轴A、B、C的正方向确定如图11-2所示,按右手螺旋法则确定。
(2) 各坐标轴的确定
确定机床坐标轴时,一般先确定Z轴,然后确定X轴和Y轴。
Z轴:一般以传递切削力的主轴定为Z坐标轴,如果机床有一系列主轴,则选尽可能垂直于工件装夹面的主要轴为Z轴。
Z轴的正方向为从工件到刀具夹持的方向。
X轴:为水平的、平行于工件装夹平面的轴。
对于刀具旋转的机床,若Z轴为水平时,由刀具主轴的后端向工件看,X轴正方向指向右方;若Z轴为垂直时,由主轴向立柱看,X轴正方向指向右方。
对无主轴的机床(如刨床),X轴正方向平行于切削方向。
Y轴:垂直于X及Z轴,按右手法则确定其正方向。
(3) 机床坐标系的原点
机床坐标系的原点也称机械原点、参考点或零点,这个原点是机床上固有的点,机床一经设计和制造出来,机械原点就已经被确定下来。
机床启动时,通常要进行机动或手动回零,就是回到机械原点。
数控机床的机械原点一般在直线坐标或旋转坐标回到正向的极限位置。
2. 工件坐标系(编程坐标系)
图11-3 工件坐标系与机床坐标系的位置关系 工件坐标系是由编程人员
在编制程序时用来确定刀具和
程序的起点,工件坐标系的原点
可由编程人员根据具体情况确
定,但坐标轴的方向应与机床坐标系一致,并且与之有确定的尺寸关系。
机床坐标系与工件坐标
系的关系如图11-3所示。
不同的工件建立的坐标系也可有所不同,有的数控系统允许一个工件可建立多个工件坐标系,或者在一个工件坐标系下再建立一个坐标系,称之为局部坐标系。
局部坐标系原点的坐标值应是相对于工件坐标系,而不是相对于机床坐标系。
通过建立多个坐标系或局部坐标系可大大简化零件的编程工作。