工件坐标系设定
- 格式:pdf
- 大小:320.59 KB
- 文档页数:12
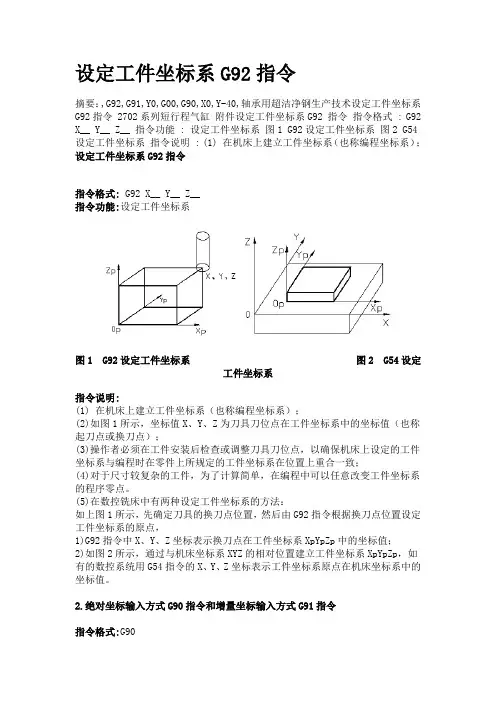
设定工件坐标系G92指令摘要:,G92,G91,Y0,G00,G90,X0,Y-40,轴承用超洁净钢生产技术设定工件坐标系G92指令 2702系列短行程气缸附件设定工件坐标系G92 指令指令格式 : G92 X__ Y__ Z__ 指令功能 : 设定工件坐标系图1 G92设定工件坐标系图2 G54设定工件坐标系指令说明 : (1) 在机床上建立工件坐标系(也称编程坐标系);设定工件坐标系G92指令指令格式: G92 X__ Y__ Z__指令功能:设定工件坐标系图1 G92设定工件坐标系图2 G54设定工件坐标系指令说明:(1) 在机床上建立工件坐标系(也称编程坐标系);(2)如图1所示,坐标值X、Y、Z为刀具刀位点在工件坐标系中的坐标值(也称起刀点或换刀点);(3)操作者必须在工件安装后检查或调整刀具刀位点,以确保机床上设定的工件坐标系与编程时在零件上所规定的工件坐标系在位置上重合一致;(4)对于尺寸较复杂的工件,为了计算简单,在编程中可以任意改变工件坐标系的程序零点。
(5)在数控铣床中有两种设定工件坐标系的方法:如上图1所示,先确定刀具的换刀点位置,然后由G92指令根据换刀点位置设定工件坐标系的原点,1)G92指令中X、Y、Z坐标表示换刀点在工件坐标系XpYpZp中的坐标值;2)如图2所示,通过与机床坐标系XYZ的相对位置建立工件坐标系XpYpZp,如有的数控系统用G54指令的X、Y、Z坐标表示工件坐标系原点在机床坐标系中的坐标值。
2.绝对坐标输入方式G90指令和增量坐标输入方式G91指令指令格式:G90G91指令功能:设定坐标输入方式指令说明:(1)G90指令建立绝对坐标输入方式,移动指令目标点的坐标值X、Y、Z表示刀具离开工件坐标系原点的距离;(2)G91指令建立增量坐标输入方式,移动指令目标点的坐标值X、Y、Z表示刀具离开当前点的坐标增量。
例题:如图3所示,刀具从A点快速移动至C点,使用绝对坐标与增量坐标方式编程。
加工中心g15g16编程用法(一)加工中心G15 G16编程用法基本概念•G15:设定工件坐标系•G16:设定工件坐标系平面G15编程用法1.G15的使用格式:G15 Pn;2.Pn表示设定工件坐标系,n为坐标系号,取值范围为1~9;3.将当前坐标系设为工件坐标系,可以用G54~G59命令;G16编程用法1.G16的使用格式:G16 Xn Yn Zn;2.Xn Yn Zn表示设定工件坐标系平面的法线方向;3.G16命令主要用来解决不规则工件的加工问题,使其在不同的平面上进行加工;总结•加工中心的G15和G16命令是切削加工中常用的编程命令;•G15命令有利于坐标系的设定,并可以使加工更加准确;•G16命令则有助于解决复杂工件的加工问题。
以上就是关于加工中心G15 G16编程用法的相关介绍,希望对大家有所帮助。
注意事项•在使用G15和G16命令时,必须先定义工件坐标系,否则会产生错误;•在使用G16命令时,必须先定义G15命令设定的工件坐标系,否则也会产生错误;•可以使用M98子程序命令在程序中嵌套G15和G16命令,使其更加灵活。
示例代码O0001(程序号)G00 G17 G40 G49 G54M3 S1000G0 X50 Y50G15 P1G0 X0 Y0G1 Z-10 F200G1 X100 Y0 F500G16 X0 Y0 Z1G1 X100 Y0 Z-10 F200M2以上代码为一个简单的工件坐标系设定程序,其中使用了G15命令将当前坐标系设为工件坐标系,并使用G16命令对工件坐标系平面进行设定并进行加工。
该代码示例好理解,可以供学习参考。
总结本文重点介绍了加工中心G15 G16编程用法并给出示例代码,希望对您的学习有所帮助。
在实际工作中,我们要根据不同的加工工件和需求进行合理的编程,并严格按照编程规范执行,以确保生产质量。
工件坐标系原点设定的几种方法和比较(总5页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--数控铣床对刀操作步骤及工件坐标系原点的几种设定方法和比较清远市职业技术学校刘远林摘要:数控铣床操作教学中,因很多教师都不很详细介绍对刀操作步骤及工件坐标系原点的设定方法,甚至很多教师都只掌握工件坐标系原点设定的一、两种方法,不知道哪一种设定方法更为方便、快捷。
本文通过对数控铣床对刀操作步骤及工件坐标系原点的几种设定方法的介绍,以供大多数数控铣床操作者或教学者参考。
关键词:数控铣床对刀操作操作步骤工件坐标系设定在数控铣床操作的教学过程中,我发现很多学生对对刀这一操作及工件坐标系原点的设定相对较难掌握。
因很多教科书或数控铣床的相关操作手册并没有提到对刀操作的具体步骤,所以学生掌握对刀操作的具体步骤就只能靠教师的讲授和演示。
而工件坐标系的设定,不同的数控系统设定的方法又往往不同,且设定的方法较多种,如G92对刀方法G54对刀方法等。
这就是学生在学习数控铣床对对刀操作及工件坐标系原点设定的方法较难掌握的原因之一。
我根据多年对数控铣床的操作经验,总结出以下较常用的试切对刀操作步骤及工件坐标系原点的几种设定方法,并对工件坐标系原点的几种设定方法进行比较,以供大多数数控铣床的操作者尤其是初学者进行选用和参考。
下面以华中数控系统HNC-21/22M对对刀操作步骤及工件坐标系原点设定的几种方法进行说明和比较。
一、试切对刀操作步骤。
假设对刀点为图a两相互垂直直线的交点,且z轴零点在工件上表面上,其操作步骤为:(1)将工件毛胚准确定位装夹到工作台上。
安装时要使零件的基准方向和X、Y、Z轴的方向一致,并且切削时刀具不会碰到夹具或工作台。
(2)将所用铣刀装到主轴上并使主轴中速转动。
(3)移动(手动移动或手轮摇动)铣刀靠近被测边,并使铣刀周刃轻微接触到被测边,如图a铣刀所在A点(或B点)位置。
简述abb工业机器人工件坐标系的设定步骤和作用
ABB工业机器人工件坐标系的设定步骤和作用包括以下几个步骤:
1. 定义基坐标系:首先需要确定一个基坐标系,通常是机器人的参考点或固定的机器人坐标系。
2. 定义工件坐标系:根据实际需求,通过机器人的示教器或者编程进行操作,选取一个合适的位置和方向,定义一个工件坐标系,通常是相对于基坐标系的。
3. 设置工件坐标系的原点:确定工件坐标系的原点位置,可以是工件的中心点或者其他合适的位置。
4. 设置工件坐标系的方向:确定工件坐标系的方向,通常可以通过朝向工件的某个参考点或者参照工件的特征来确定。
5. 确认工件坐标系:经过以上步骤设定好工件坐标系后,需要进行确认,确认无误后将坐标系保存。
工件坐标系的作用主要有以下几个方面:
1. 操作参考:通过设定工件坐标系,机器人可以根据该坐标系进行定位和操作,方便操作者进行编程和示教。
2. 补偿校准:通过工件坐标系的设定,可以实现机器人对工件的补偿校准。
例如,如果工件位置发生微小偏差,可以通过调
整工件坐标系来实现对偏差的修正。
3. 工具坐标系的设定:在某些情况下,需要将工具的坐标系与工件坐标系进行关联。
通过设定工件坐标系,可以方便地设定工具的坐标系,以实现更精确的操作。
总的来说,ABB工业机器人工件坐标系的设定步骤和作用可以帮助机器人实现精确的操作和补偿校准,提高工作效率和质量。
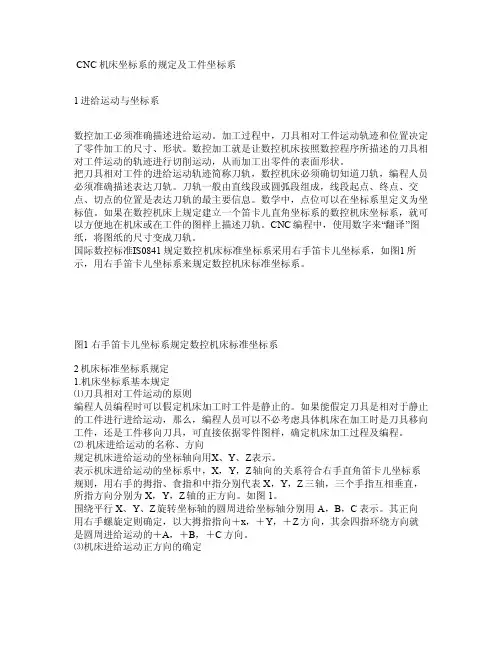
CNC机床坐标系的规定及工件坐标系1进给运动与坐标系数控加工必须准确描述进给运动。
加工过程中,刀具相对工件运动轨迹和位置决定了零件加工的尺寸、形状。
数控加工就是让数控机床按照数控程序所描述的刀具相对工件运动的轨迹进行切削运动,从而加工出零件的表面形状。
把刀具相对工件的进给运动轨迹简称刀轨,数控机床必须确切知道刀轨,编程人员必须准确描述表达刀轨。
刀轨一般由直线段或圆弧段组成,线段起点、终点、交点、切点的位置是表达刀轨的最主要信息。
数学中,点位可以在坐标系里定义为坐标值。
如果在数控机床上规定建立一个笛卡儿直角坐标系的数控机床坐标系,就可以方便地在机床或在工件的图样上描述刀轨。
CNC编程中,使用数字来“翻译”图纸,将图纸的尺寸变成刀轨。
国际数控标准I S0841规定数控机床标准坐标系采用右手笛卡儿坐标系,如图1所示,用右手笛卡儿坐标系来规定数控机床标准坐标系。
图1右手笛卡儿坐标系规定数控机床标准坐标系2机床标准坐标系规定1.机床坐标系基本规定⑴刀具相对工件运动的原则编程人员编程时可以假定机床加工时工件是静止的。
如果能假定刀具是相对于静止的工件进行进给运动,那么,编程人员可以不必考虑具体机床在加工时是刀具移向工件,还是工件移向刀具,可直接依据零件图样,确定机床加工过程及编程。
⑵机床进给运动的名称、方向规定机床进给运动的坐标轴向用X、Y、Z表示。
表示机床进给运动的坐标系中,X,Y,Z轴向的关系符合右手直角笛卡儿坐标系规则,用右手的拇指、食指和中指分别代表X,Y,Z三轴,三个手指互相垂直,所指方向分别为X,Y,Z轴的正方向。
如图1。
围绕平行X、Y、Z旋转坐标轴的圆周进给坐标轴分别用A,B,C表示。
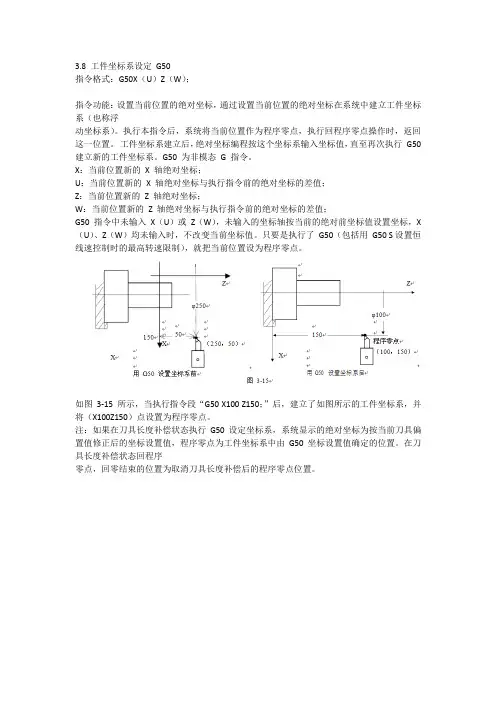
3.8 工件坐标系设定G50
指令格式:G50X(U)Z(W);
指令功能:设置当前位置的绝对坐标,通过设置当前位置的绝对坐标在系统中建立工件坐标系(也称浮
动坐标系)。
执行本指令后,系统将当前位置作为程序零点,执行回程序零点操作时,返回这一位置。
工件坐标系建立后,绝对坐标编程按这个坐标系输入坐标值,直至再次执行G50 建立新的工件坐标系。
G50 为非模态G 指令。
X:当前位置新的X 轴绝对坐标;
U:当前位置新的X 轴绝对坐标与执行指令前的绝对坐标的差值;
Z:当前位置新的Z 轴绝对坐标;
W:当前位置新的Z 轴绝对坐标与执行指令前的绝对坐标的差值;
G50 指令中未输入X(U)或Z(W),未输入的坐标轴按当前的绝对前坐标值设置坐标,X (U)、Z(W)均未输入时,不改变当前坐标值。
只要是执行了G50(包括用G50 S设置恒线速控制时的最高转速限制),就把当前位置设为程序零点。
如图3-15 所示,当执行指令段“G50 X100 Z150;”后,建立了如图所示的工件坐标系,并将(X100Z150)点设置为程序零点。
注:如果在刀具长度补偿状态执行G50设定坐标系,系统显示的绝对坐标为按当前刀具偏置值修正后的坐标设置值,程序零点为工件坐标系中由G50坐标设置值确定的位置。
在刀具长度补偿状态回程序
零点,回零结束的位置为取消刀具长度补偿后的程序零点位置。
课题五G54工件坐标系的设定复习回顾数控加工中心面板组成:显示区、控制区和输入区一、任务描述1、任务描述在加工中心上对右图所示工件进行G54工件坐标系的设定(毛坯尺寸100mmX80mmX30mm )本课题使用CY-VMC650型FANUC系统数控加工中心。
2、任务要求掌握G54工件坐标系设定的操作流程掌握“取中”对刀法的操作步骤和使用方法掌握“试切” 法的操作方法二、任务分析G54工件坐标系设定的过程就是确定工件坐标系原点在机床坐标系内的位置。
该任务是数控机床加工的首要任务,为了完成该项任务,必须了解机床坐标系、工件坐标系、坐标系设定方法、对刀方法等方面的知识。
三、知识链接1、机床坐标系和机床原点机床坐标系是机床上固有的坐标系,是用来确定工件坐标系的基本坐标系,是确定刀具(刀架)或工件(工作台)位置的参考系,并建立在机床原点上。
作用:机床坐标系是确定工件在机床上的位置。
2.工件坐标系和工件原点编程人员在编程时设定的坐标系,也称为编程坐标系。
作用:工件坐标系是确定刀具在工件上的位置。
四、任务实施1、X、Y方向的对刀对刀的目的是确定加工工件原点在机床坐标系中的位置。
X、Y方向的对刀实质就是确定工件坐标系原点在机床坐系中X坐标值和Y坐标值。
X=(X1+X2)/22.Z向对刀Z向对刀操作有两种方式,一种方法是试切法,另一种方法是利用Z向设定器精确设定Z向零点位置。
本节课我们学习试切法对Z坐标。
五、任务总结1、任务小结本节课我们讲解了机床坐标系、工件坐标系、对中法找坐标值、偏心式寻边器的使用、试切法Z向对刀及G54工件坐标系的设定过程。
2、安全文明生产每位同学严格遵守机床操作规程,严格按照示范操作步骤进行练习,未经允许,不得擅自动用机床。
六、示范练习全班学生分六组,每组六人,一组一台机床,示范练习从第一组开始,其他各组先打开机床复习一下机床面板操作。
未经老师允许,任何人不得开动机床,由各组组长负责。
用g50设置工件坐标系的方法一、什么是g50。
1.1 g50是数控编程里一个非常重要的指令。
在数控车床的世界里呀,它就像是一个指挥官,专门负责设定工件坐标系呢。
这个工件坐标系啊,就好比是工件在数控车床这个大舞台上的“住址”,要是没有准确地设定这个“住址”,车床加工起来可就会像没头的苍蝇一样,乱了套啦。
1.2 简单来说,g50可以让我们告诉车床,工件的原点在哪里。
这原点就如同我们盖房子的地基,是整个加工的基准点。
比如说,我们要加工一个小零件,这个小零件在车床上的哪个位置开始加工,是由g50来确定这个起始点的,这可是相当关键的一步。
二、g50设置工件坐标系的步骤。
2.1 首先呢,我们得知道相关的坐标参数。
这就好比我们出门要知道目的地的地址一样。
在数控车床中,我们要清楚工件的尺寸、形状等信息,这样才能确定合适的坐标值。
比如说,一个圆柱形的工件,我们要知道它的直径、长度等数据,然后根据这些数据来计算坐标值。
这一步可不能马虎,要是坐标值算错了,那加工出来的工件可能就成了“四不像”,白白浪费了材料,这可就“竹篮打水一场空”啦。
2.2 接着,在编程的时候,我们要把g50指令写在合适的位置。
这就像我们安排工人在合适的时间做合适的工作一样。
一般来说,在程序的开头部分就要设置好g50指令。
例如,我们可以写成“g50 X100 Z100”,这里的X100和Z100就是我们设定的坐标值,这个值是根据工件的实际情况和加工要求来确定的。
如果写错了位置,车床可能就会误解我们的意图,加工出来的东西肯定不符合要求,那可就“前功尽弃”喽。
2.3 最后呀,我们要进行校验。
这就如同我们做完一件事要检查一遍一样。
我们可以通过模拟加工或者在车床上进行试切等方法,来看看我们设置的工件坐标系是否正确。
如果发现有问题,要及时调整。
可不能抱着“得过且过”的心态,不然到最后加工出一堆废品,那可就亏大了。
三、g50设置工件坐标系的注意事项。
3.1 坐标值的准确性是重中之重。
工件坐标系指令
工件坐标系(Work Coordinate System,WCS)在机械加工中是非常重要的概念,它定义了机床上的工件相对于机床坐标系的位置和方向。
在 CNC(Computer Numerical Control,数控)编程中,你需要使用相应的指令来设置和切换工件坐标系。
以下是一些常见的 CNC 编程语言中用于工件坐标系的指令:
1. G54-G59(G代码):选择工件坐标系
这些 G 代码用于选择工件坐标系。
例如:
G54: 选择工件坐标系 #1
G55: 选择工件坐标系 #2
以此类推,直到 G59
G54 ; 选择工件坐标系 #1
G55 ; 选择工件坐标系 #2
2. G92(G代码):设置工件坐标系偏移
G92 用于设置工件坐标系的偏移。
它通常用于零点设定,将机床坐标系的零点移动到工件上的某个点。
G92 X0 Y0 Z0 ; 将机床坐标系的零点设置为工件坐标系的原点
3. 工件坐标系偏移值(常量)
在一些 CNC 编程语言中,你可以直接指定工件坐标系的偏移值。
#100=10.0 ; 将 X 轴的工件坐标系偏移值设置为 10.0
#101=5.0 ; 将 Y 轴的工件坐标系偏移值设置为 5.0
4. G92.1(G代码):取消工件坐标系偏移
G92.1 用于取消工件坐标系的偏移,将其重新设置为零。
G92.1 ; 取消工件坐标系的偏移
这些指令的确切语法和功能可能会根据 CNC 控制器的型号和制造商而有所不同。
在编写 CNC 程序时,请参考相应的 CNC 控制器文档以确保正确的使用和理解。
数控机床g54坐标系设定方法数控机床是现代制造业中广泛使用的一种加工设备,它能够通过程序控制实现高精度、高效率的加工。
而在数控机床的加工过程中,坐标系的设定是非常重要的,它能够确定工件和刀具之间的相对位置,使加工过程更加精确和稳定。
本文将详细介绍数控机床中的G54坐标系设定方法。
G54坐标系是数控机床中常用的一个工件坐标系,它是基准坐标系的一种扩展。
在数控机床中,通常会有多个工件坐标系,每个工件坐标系都有自己的编号,G54就是其中之一。
G54坐标系的设定方法如下:1. 首先,需要清空机床的坐标系,确保没有其他坐标系的影响。
可以通过输入G92.1指令来实现清空坐标系的操作。
2. 然后,需要确定工件坐标系的原点位置。
原点位置通常选择在工件的某个特定点上,比如工件的中心点或者某个固定的参考点。
确定好原点位置后,将工件放置在机床上,并用夹具固定好。
3. 接下来,需要将刀具对准工件的原点位置。
可以通过手动操作或者辅助设备来实现刀具的对准。
对准好刀具后,可以使用手动模式进行试切,以确保刀具的位置和工件的原点位置一致。
4. 在刀具对准完成后,可以开始设定G54坐标系。
首先,需要输入G10指令,该指令用于设定坐标系编号和坐标系的原点位置。
比如,可以输入G10 L2 P1 X0 Y0 Z0,表示设定G54坐标系编号为1,原点位置为X=0,Y=0,Z=0。
5. 设定好G54坐标系后,可以通过输入G54指令来激活该坐标系。
激活后,机床将以G54坐标系为基准进行加工操作。
需要注意的是,数控机床中的坐标系设定是一个非常精细和复杂的过程,需要操作人员具备一定的技术和经验。
在实际操作中,还需要根据具体的加工要求和工件特点,选择合适的坐标系和坐标系原点位置。
除了G54坐标系,数控机床中还有其他常用的坐标系,如G55、G56等。
每个坐标系都有自己的编号和原点位置,操作人员可以根据需要进行选择和设定。
G54坐标系的设定是数控机床加工过程中非常重要的一步。
一.工具坐标系 1.工具坐标系的创建新建工具名称界面工具初始值参数设置界面工具设定界面工具的重量“mass”值的设定工具的重心偏移“cog”值的设定进入工具定义界面一.工具坐标系 2.工具坐标系的标定机器人工具坐标系的标定是指将工具中心点(TCP)的位置告诉机器人,指出它与末端关节坐标系的关系。
(1)外部基准标定法只需要使工具对准某一测定好的外部基准点,便可完成标定,标定过程快捷简便。
(2)多点标定法这类标定包含工具中心点(TCP)位置多点标定和工具坐标系(TCF)姿态多点标定。
TCP位置标定是使几个标定点TCF位置重合,从而计算出TCP,即工具坐标系原点相对于末端关节坐标系的位置。
•四点法:TCP姿态标定是使几个标定点之间具有特殊的方位关系,从而计算出工具坐标系相对于末端关节坐标系的姿态;•五点法:在四点法的基础上,除能确定工具坐标系的位置外还能确定工具坐标系的X轴方向;•六点法:在五点法的基础上,还能确定工具坐标系的Z轴方向;“点3”修改位置界面机器人姿态3画面“点1”修改位置界面机器人姿态1画面“点2”修改位置界面机器人姿态2画面“点4”修改位置界面机器人姿态4画面•六点法标定————设定TCP视频演示•自动计算工具重量及重心位置进入单轴运动模式界面进入主程序编辑界面选定的例行程序界面例行程序打开后界面载荷确认界面选定的例行程序界面一.工件(用户)坐标系的标定工件坐标是用来描述工件位置的坐标系。
工件坐标由两个框架构成:用户框架和对象框架。
所有的编程位置将与对象框架关联,对象框架与用户框架关联,而用户框架与大地坐标系关联。
建立工件坐标系的方法如下:主菜单→程序数据→工件坐标系→新建→名称→定义工件坐标系。
定义工件坐标系有如下两种方法:1.直接输入坐标值,即x、y、z的值。
2.示教法:编辑→定义→第一点→第二、三点(三点不在同一条直线上即可)。
三点法创建工件坐标系的步骤在我们进行加工或者测量的时候,工件坐标系的建立可谓是重中之重。
今天,我就来聊聊怎么用简单的三点法来创建工件坐标系,保证你一听就懂,甚至可以带着笑声去实践!1. 前期准备1.1 清理工作台首先,咱们得把工作台收拾干净,别让杂物在旁边捣乱。
就像做饭之前要把厨房清理干净一样,干净的工作环境能让我们的思路更加清晰。
想象一下,满桌的碗碟和食材,让人怎么下得去手呢?1.2 工具准备然后,准备好测量工具。
无论是卡尺、水平仪还是其他测量设备,都得齐全。
这里可是关键!就像打游戏之前要把装备准备好,缺一不可,才能顺利通关。
2. 确定基准点2.1 选择基准点接下来,我们得在工件上选择三个点。
这可不是随便挑的,而是要有讲究的。
想象一下,在一个球场上,三分线、罚球线、底线都得有明确的定位,不然你根本不知道怎么进球!所以,选择这三个点时,最好是工件的角落、中心或边缘,确保它们可以形成一个平面。
2.2 标记点位选好点之后,用记号笔或铅笔在上面轻轻标记一下。
小心别用太深,毕竟工件是用来加工的,不是给你涂鸦的地方。
标记就像是给工件穿上了“衣服”,让它显得更加整齐。
3. 测量与计算3.1 测量距离现在就要用你的测量工具来测量这三个点之间的距离了。
像玩拼图一样,得把每个点的位置给测量好。
想想看,如果你把拼图的边拼错了,结果就惨了!所以,认真测量,确保每一条线都准确无误。
3.2 计算坐标系最后一步,就要把测量的数据转化为坐标系了。
你可以把第一个点设定为原点,然后根据其他两点的位置,分别确定它们的坐标。
简单来说,就是把你的工件变成了一个小小的地图,让你能轻松找到每一个点。
这个过程就像在做数学题,虽然一开始可能有点难,但慢慢来,总能找出答案的。
4. 实际操作中的注意事项在整个过程中,有几个小贴士可以分享给大家。
首先,保持心态平和,别急于求成。
急功近利可不好,做事情要稳稳当当,才能保证质量。
其次,定期检查工具的准确性,别因为工具的问题而影响了整个过程。
一、概述在机械加工中,工件坐标系的设定是非常重要的一步。
工件坐标系的准确设定能够保证加工精度和效率,因此在G代码编程中,设定工件坐标系的指令也是至关重要的一部分。
本文将就G代码中关于工件坐标系设定的指令进行介绍和解析,帮助读者更好地理解和应用这些指令。
二、G54指令G54指令用于设定工件坐标系的原点位置。
具体用法如下:G54 X__ Y__ Z__;其中,X、Y、Z分别为工件坐标系原点在机床坐标系中的坐标值。
这些坐标值将确定工件坐标系的原点位置,从而确定工件的相对位置。
三、G55指令G55指令和G54指令类似,用于设定多个工件坐标系。
其具体用法如下:G55 X__ Y__ Z__;通过使用G55指令,可以为不同的工件设定不同的坐标系,从而方便在加工多个工件时进行坐标切换。
四、G56~G59指令G56至G59指令同样用于设定多个工件坐标系,其具体用法和功能与G55相似,只是可用于更多的工件坐标系的设定。
五、注意事项在使用G54~G59指令时,需要注意以下几点:1. 在设定工件坐标系时,要保证坐标值的准确性,避免因误差导致加工偏差。
2. 在切换工件坐标系时,要及时更新坐标系的切换,避免出现错误的位置偏差。
3. 对于不同类型的加工,需要灵活使用G54~G59指令,合理设定工件坐标系,以提高加工效率和精度。
六、结语通过对G54~G59指令的介绍和解析,我们了解到这些指令在G代码编程中的重要性和用法。
正确使用这些指令,能够帮助我们更好地控制工件的坐标系,从而提高加工的精度和效率。
希望读者在今后的机械加工中,能够更加熟练地运用这些指令,取得更好的加工效果。
七、G54~G59指令的应用举例在实际机械加工中,G54~G59指令的应用非常广泛。
下面我们通过一些具体的应用举例来展示这些指令的实际用法。
1. 多工件加工在进行批量加工时,常常需要加工多个相同或相似的工件。
使用G54~G59指令可以灵活地设定不同的工件坐标系,从而在不同的工件之间实现坐标切换,提高加工效率。
G54指令建立可偏移工件原点的工件坐标系G54指令建立可偏移工件原点的工件坐标系。
指令格式:G54(或G55~G59)指令说明:①加工之前,通过对刀确定工件坐标系原点在机床坐标系中的坐标值,再通过MDI方式(手动数据输入)把该值输入到机床相应寄存器中(如G54寄存器)。
程序中出现G54指令时,就相应地建立了工件坐标系。
②工件坐标系可进行六次偏移,指令分别是G54、数控机床G55、G56、G57、G58、G59,均为模态指令。
G54为缺省值。
③若第一次原点偏移值对刀后,其他几次工件原点偏移加工中心值则可不需要重新对刀,而直接通过工件相互之间几何关系确定工件原点偏移值,通过MDI方式把该值输入到机床相应寄存器中(如G55、G56、G57、G58、G59寄存器),从而建立工件坐标系,程序中用G55、G56、G57、G58、G59指令建立工件坐标系。
④G54~G59指令程序段可以和其他指令同行出现,数控机床如G54 Gg0 G01 X10 Y10时,运动部件在选定的工件坐标系中进行移动。
程序段运行后,无论刀具当前点在哪里,它加工中心都会移动到工件坐标系中的X10 Y10点上。
(4)G54与G92配合使用有些时候用G54建立工件坐标系与G92建立浮动工件坐标系配合使用更加方便。
加工之前,通过对刀确定工件坐标系原点O在机床坐标系中的坐标值,再通过MDI方式(手动数据输入)把该值输入到机床相应寄存器中(如G54寄存器)。
程序中出现G54指令时,数控机床就相应地建立了工件坐标系。
用G92建立浮动工件坐标系不需要输入各工件坐标系的机床坐标值。
(5)数控机床对刀操作对刀是指零件被装夹到机床上之后,加工中心操作人员用某种操作方法获得工件原点在机床坐标系中的位置坐标值的操作过程。
通过对刀操作确定工件坐标系原点在机床坐标系的值,建立工件坐标系,从而建立编程坐标系与机床坐标系的联系。
因此,数控机床对刀的目的就是建立工件坐标系!①简易对刀步骤。
数控车床对刀及建立工件坐标系的方法随着工业自动化和信息化的不断提升,数控技术在各种加工领域得到了广泛的应用。
而在数控切削加工中,数控车床是最常用的加工设备之一。
数控车床除了具有高精度、高效率和适应性强等特点,还需经过严格的数控系统编程和设置,才能完成高质量的加工工作。
其中,数控车床对刀及建立工件坐标系是数控加工的重要环节,本文将介绍数控车床对刀及建立工件坐标系的方法。
一、数控车床对刀的基本概念对刀是指将切削刀具与工件之间的距离调整到实际加工中所需要的距离,以达到满足加工精度和质量的要求。
对刀的目的是使刀具与工件表面紧密接触,确保加工时的切削精度和加工质量,同时还能提高加工效率和加工精度,避免刀具和工件的磨损。
在数控车床中,对刀是设置加工坐标系的前提,只有正确的对刀才能建立准确的加工坐标系。
二、数控车床对刀和建立工件坐标系的方法数控车床对刀及建立工件坐标系的方法主要包括手动对刀、自动对刀、激光对刀、数字化对刀和工件坐标系的设定。
1. 手动对刀手动对刀是一种较为简单、粗略的对刀方法。
它需要由操作工人手动调整刀具与工件的距离,以确定刀具的切削位置和切削深度。
这种操作方法适用于简单的加工,而且工人需要有一定的经验和技巧。
2. 自动对刀自动对刀是一种先进的对刀方法。
它采用数控系统中的控制指令,通过加工程序自动调整刀具和工件的距离,实现自动对刀。
自动对刀比手动对刀更精确可靠,同时也能提高加工效率。
具体操作步骤为:先设置加工刀具,选择自动对刀功能,然后运行自动对刀程序,等待自动对刀完成即可。
3. 激光对刀激光对刀是一种用激光设备进行对刀的方法。
它能够无需接触式感应,或者在接触时减小误差,能够实现更加准确的定位,从而节约了对刀时间,提高了对刀精度。
操作步骤如下:在工件表面上安装激光对刀仪,开启激光对刀功能,将激光探头平行于工件表面调整至合适位置,然后使用数控系统设置对刀程序,就可以自动完成激光对刀功能,根据显示出的数值进行校正。