伪距、载波相位测量原理
- 格式:ppt
- 大小:2.93 MB
- 文档页数:36
载波相位与伪距组合测量
利用载波相位和伪距进行进行组合测量,主要有两种方法:
∙用伪距估算载波整周模糊度
算法思想:
伪距与载波相位的近似关系式:
因此,一种简单估算整周模糊度值的方法为:
其中,“[]”代表四舍五入的取整运算,即上式得到一个整周模糊度的整数型估算值。
分析:
这种估算方法只是用伪距对相位整周模糊度进行粗略的估计。
而载波相位的测量精度是波长的1/100,在2G频段上对应的精度为1.5mm,远小于码片宽度,调节范围小,只可做细校准,使数据的误差抖动较小,但是无法改变原有定位误差的基本量级。
(除非能够连续记录载波的变化)。
∙载波相位平滑伪距的方法
算法思想:
利用精度更高但存在模糊度的载波相位观测值来平滑粗糙的伪距观测值。
采用以下Hatch滤波的形式对观测值进行实时处理:
分析:
载波相位平滑伪距是一种滤波的形式,其本质是多次测量取均值,且利用载波相位进行局部调整。
其可以减小高斯噪声的影响,但是对于室内定位没有相对移动的情况下,无法减少多径引起的固有误差。
载波相位的调节能力有限:载波相位的数据相对伪距很小,单次测量对结果影响较小,卫星中通过长时间跟踪的总体累计产生影响。
而在地面定位系统数据为突发数据,无法维持长时间的累计,无法改变测量精度。
伪距测距原理GPS接收机若要实现定位,必须解决如下两个问题:一是要知道各颗可见卫星在空间的准确位置,二是要测量从接收机到这些卫星的精确距离。
GPS接收机对每颗卫星产生伪距和载波相位两个基本距离测量值。
伪距测量值:伪距在GPS领域是一个非常重要的概念,它是GPS接收机对卫星信号的一个最基本的距离测量值。
通过测量GPS信号从GPS卫星到接收机的传输时间,再乘以信号的传播速度,可得到GPS卫星与接收机之间大概距离的测量值称为伪距。
核心是测量GPS卫星发射的测距码信号(C/A码或P码)到达用户接收机天线的电波传播时间τ。
为了测量上述传播时间,在用户GPS接收机里复制了与卫星发射的测距码(C/A码或P码)结构完全相同的码信号,通过接收机中的时间延迟器,使复制的测距码进行相移,使其在码元上与接收到的卫星发射的测距码对齐,即进行相关处理。
当相关系数为1时,接收到的卫星测距码与本地复制的测距码码元对齐。
为此,所需要的相移量就是卫星发射的码信号到达接收机天线的传播时间τ。
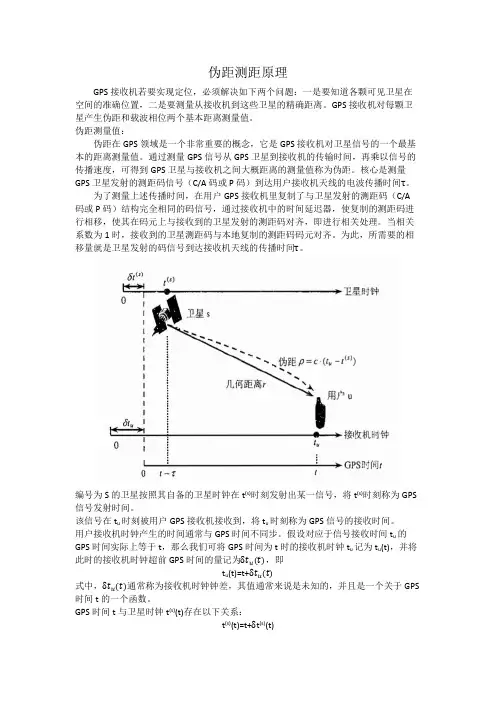
编号为S的卫星按照其自备的卫星时钟在t(s)时刻发射出某一信号,将t(s)时刻称为GPS 信号发射时间。
该信号在t u时刻被用户GPS接收机接收到,将t u时刻称为GPS信号的接收时间。
用户接收机时钟产生的时间通常与GPS时间不同步。
假设对应于信号接收时间t u的GPS 时间实际上等于t,那么我们可将GPS时间为t时的接收机时钟t u记为t u(t),并将此时的接收机时钟超前GPS时间的量记为δt u(t),即t u(t)=t+δt u(t)式中,δt u(t)通常称为接收机时钟钟差,其值通常来说是未知的,并且是一个关于GPS 时间t的一个函数。
GPS时间t与卫星时钟t(s)(t)存在以下关系:t(s)(t)=t+δt(s)(t)其中卫星时钟钟差δt(s)(t)可以视为已知的,根据此式GPS时间与卫星时钟在信号发射时刻(t-τ)时的关系可表达成t(s)(t-τ)=t-τ+δt(s)(t-τ)GPS接收机根据接收机时钟在t u(t)时刻对GPS信号进行采样,然后对采样信号进行处理,可得到标记在GPS信号上的发射时间t(s)(t-τ)。
一、静态定位与动态定位(一)定义1.静态定位2.动态定位(二)动态定位和静态定位1.静态定位:由于接受机的位置固定不动,就可以进行大量的重复观测,所以静态定位可靠性强,定位精度高,在大地测量、工程测量中得到了广泛的应用,是精密定位中的基本模式。
2.动态定位:其特点是测定一个动点的实时位置,多余观测量少、定位精度低。
目前,导航型的GPS接受机可以说是一种广义的动态定位,它除了要求测定动点的实时位置外,一般还要求测定运动载体的状态参数,如速度、时间和方位等。
二、单点定位和相对定位1.定义GPS单点定位也叫绝对定位,就是采用一台接受机进行定位的模式,它所确定的是接受机天线在WGS-84世界大地坐标系统中的绝对位置,所以单点定位的结果也属于该坐标系统。
2.单点定位的优缺点:优点是只需一台接受机即可独立定位,外业观测的组织及实施较为方便,数据处理也较为简单。
缺点是定位精度较低,受卫星轨道误差,钟同步误差及信号传播误差等因素的影响,精度只能达到米级。
所以该定位模式不能满足大地测量精密定位的要求。
但它在地质矿产勘察等低精度的测量领域,仍有着广泛的应用前景。
3.相对定位定义:4.单点定位、相对定位与动、静态的关系在单点定位和相对定位中,又都可能包括静态定位和动态定位两种方式。
其中静态相对定位一般均采用载波相位观测值为基本观测量。
这种定位方法是当前GPS测量定位中精度最高的一种方法,在大地测量、精密工程测量、地球动力学研究和精密导航等精度要求较高的测量工作中被普遍采用。
三、主动式测距和被动式测距1.主动式测距用电磁波测距仪发射测距信号,通过另一端的反射器回来,再由测距仪接受。
如图4-2所示:根据测距信号的往、返传播时间求解出往、返距离2ρ 。
由于电磁波测距仪需在测站点上主动发出测距信号,故称这种测距方式为主动式测距。
主动式测距只需要求一起钟自身能在信号往、返时间段中保持稳定,就不会影响测距精度。
其缺点是用户必须发射信号,因而难以隐蔽自己,这对军事用户十分不利。
【转】GPS定位原理⼀、距离测定原理1、伪距测量伪距测量是利⽤全球卫星定位系统进⾏导航定位的最基本的⽅法,其基本原理是:在某⼀瞬间利⽤GPS接收机同时测定⾄少四颗卫星的伪距,根据已知的卫星位置和伪距观测值,采⽤距离交会法求出接收机的三维坐标和时钟改正数。
伪距定位法定⼀次位的精度并不⾼,但定位速度快,经⼏⼩时的定位也可达⽶级的若再增加观测时间,精度还可以提⾼。
每⼀卫星播发⼀个伪随机测距码信号,该信号⼤约每1毫秒播发⼀次,接收仪同时复制出⼀个同样结构的信号并与接收到的卫星信号进⾏⽐较,由信号的延迟时间(dT)推算出卫星⾄接收仪的距离。
2、载波相位测距载波相位测量是利⽤GPS卫星发射的载波为测距信号。
由于载波的波长(λL1=19cm,λL2=24cm) ⽐测距码波长(λC/A=293m,λp=29.3m)要短得多,因此对载波进⾏相位测量,就可能得到较⾼的测量定位精度。
整周未知数N的确定是载波相位测量中特有的问题,也是进⼀步提⾼GPS定位精度、提⾼作业速度的关键所在。
⽬前,确定整周未知数的⽅法主要有三种:伪距法、N作为未知数参与平差法和三差法。
考虑到GPS定位时的误差来源,当前普遍采⽤的观测量线性组合⽅法称之为差分法,其具体形式有三种,即所谓的单差法、双差法和三差法。
⼆、点位测定原理当只有⼀颗卫星时,我们只能确定以 R1为半径的圆上的某个点上。
当有两颗卫星时,2个球⾯相交成⼀个圆弧点位被限制在⼀曲线上。
当只有三颗卫星时,3个球⾯相交成⼀个点,3个距离段可以确定纬度,经度,和⾼程,点的空间位置被确定。
当只有四颗卫星时,4段或更多的距离就解决了纬度,经度,⾼程和时间四个未知数,这就类似于测边交会问题的解决原理。
多颗卫星不间断地发送⾃⾝的星历参数和时间信息,⽤户接收到这些信息后,经过计算求出接收机的三维位置,三维⽅向以及运动速度和时间信息。
从以上原理我们可以知道,在GPS测量时,⾄少需要四颗卫星即可进⾏测量,但由于卫星信号的误差源⽐较多,想要得到更⾼精度的点位精度或在进⾏RTK测量时,必须要在五⾥颗以上才能保证测量的精度。
伪距和载波相位观测方程异同点伪距观测和载波相位观测是卫星导航系统中常用的两种测量方式。
它们分别基于卫星信号的传播时间和相位变化来确定接收机与卫星之间的距离和位置。
虽然伪距观测和载波相位观测在原理和应用上存在一些异同点,但它们都是通过测量卫星信号的特征来实现导航定位的重要手段。
伪距观测和载波相位观测都是通过测量接收机接收到的卫星信号来计算距离的。
伪距观测是利用卫星信号的传播时间差来确定距离,而载波相位观测则是通过测量卫星信号的相位变化来计算距离。
不同的是,伪距观测是直接测量卫星信号的传播时间差,而载波相位观测则需要通过对信号的相位进行解算来得到距离。
伪距观测和载波相位观测在测量精度上存在一定的差异。
伪距观测由于只测量了信号的传播时间差,受到误差的影响较大,一般精度在几米至十几米左右。
而载波相位观测由于测量的是信号的相位变化,精度较高,可以达到亚米甚至厘米级别。
因此,在高精度定位和导航应用中,更常采用载波相位观测来实现更精确的定位。
伪距观测和载波相位观测在数据处理上也存在一些差异。
伪距观测直接从接收机接收到的卫星信号中提取出伪距信息,处理简单快速,但由于信号传播过程中存在大气延迟等误差,需要进行差分改正和误差校正才能得到较准确的定位结果。
而载波相位观测需要对信号进行解算,需要更复杂的算法和计算过程,但由于测量精度高,可以获得更准确的定位结果。
不仅如此,伪距观测和载波相位观测在应用上也有一些差异。
伪距观测由于测量简单、处理快速,更适用于实时定位和导航应用,如车载导航、船舶定位等。
而载波相位观测由于精度高,更适用于精密测量和科学研究领域,如大地测量、精密农业等。
总结起来,伪距观测和载波相位观测是卫星导航系统中常用的两种测量方式,它们分别基于卫星信号的传播时间和相位变化来确定接收机与卫星之间的距离和位置。
虽然两者在原理、精度、数据处理和应用上存在一些差异,但都是实现导航定位的重要手段。
伪距观测适用于实时定位和导航应用,而载波相位观测适用于精密测量和科学研究。
载波相位测量作者:周晓林利用测距码进行伪距测量是全球定位系统的基本测距方法。
然而由于测距码的码元长度较大,对于一些高精度应用来讲其测距精度还显得过低无法满足需要。
如果观测精度均取至测距码波长的百分之一,则伪距测量对P码而言量测精度为30cm,对C/A码而言为3cm左右。
而如果把载波作为量测信号,由于载波的波长短所以就可达到很高的精度。
目前的大地型接收机的载波相位测量精度一般为1~2mm,有的精度更高。
但载波信号是一种周期性的正弦信号,而相位测量又只能测定其不足一个波长的部分,因而存在着整周数不确定性的问题,使解算过程变得比较复杂。
在GPS信号中由于已用相位调整的方法在载波上调制了测距码和导航电文,因而接收到的载波的相位已不再连续,所以在进行载波相位测量以前,首先要进行解调工作,设法将调制在载波上的测距码和卫星电文去掉,重新获取载波,这一工作称为重建载波。
重建载波一般可采用两种方法,一种是码相关法,另一种是平方法。
采用前者,用户可同时提取测距信号和卫星电文,但用户必须知道测距码的结构;采用后者,用户无须掌握测踉码的结构,但只能获得载波信号而无法获得测距码和卫星电文。
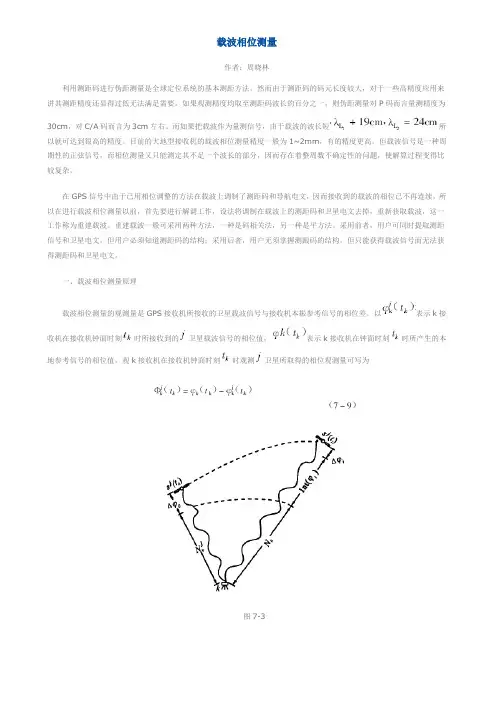
一、载波相位测量原理载波相位测量的观测量是GPS接收机所接收的卫星载波信号与接收机本振参考信号的相位差。
以表示k接收机在接收机钟面时刻时所接收到的卫星载波信号的相位值,表示k接收机在钟面时刻时所产生的本地参考信号的相位值,观k接收机在接收机钟面时刻时观测卫星所取得的相位观测量可写为图7-3通常的相位或相位差测量只是测出一周以内的相位值。
实际测量中,如果对整周进行计数,则自某一初始取样时刻以后就可以取得连续的相位测量值。
如图7-3在初始时刻,测得小于一周的相位差为,其整周数为,此时包含整周数的相位观测值应为接收机继续跟踪卫星信号,不断测定小于一周的相位差,并利用整波计数器记录从到时间内的整周数变化量,只要卫星从到之间卫星信号没有中断,则初始时刻整周模糊度就为一常数,这样,任一时刻卫星到# 接收机的相位差为上武说明,从第一次开始,在以后的观测中,其观测量包括了相位差的小数部分和累计的整周数。
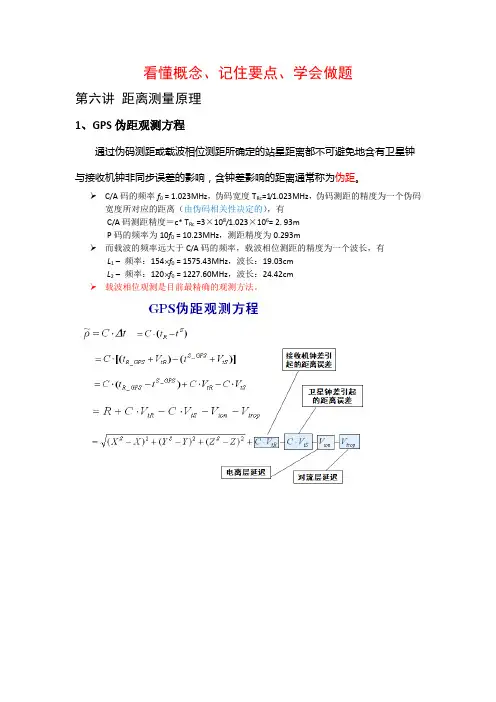
看懂概念、记住要点、学会做题第六讲距离测量原理1、GPS伪距观测方程通过伪码测距或载波相位测距所确定的站星距离都不可避免地含有卫星钟与接收机钟非同步误差的影响,含钟差影响的距离通常称为伪距。
➢C/A码的频率f0 = 1.023MHz,伪码宽度T Rc=1/1.023MHz,伪码测距的精度为一个伪码宽度所对应的距离(由伪码相关性决定的),有C/A码测距精度=c* T Rc =3×108/1.023×106= 2. 93mP码的频率为10f0 = 10.23MHz,测距精度为0.293m➢而载波的频率远大于C/A码的频率,载波相位测距的精度为一个波长,有L1–频率:154⨯f0 = 1575.43MHz,波长:19.03cmL2–频率:120⨯f0 = 1227.60MHz,波长:24.42cm➢载波相位观测是目前最精确的观测方法。
2、载波相位测量原理测量接收机接收到的具有多普勒频移的载波信号,与接收机产生的参考载波信号之间的相位差。
ϕSϕRρ=λ(ϕ-ϕS R )ϕSϕRΦ()t R Φ(t S 接收机根据自身的钟在时刻复制信号的相位t R 接收机根据自身的钟在时刻所接收到卫星在时刻所发送信号的相位t R t Sρ=λ(Φ()-)t R Φ()t S(理想情况) (实际情况)载波相位测量的观测方程有三种类型的线性组合:➢ 同类型同频率观测值的线性组合 ➢ 同类型不同频率观测值的线性组合 ➢ 不同类型的双频观测值的线性组合(1)同类型同频率观测值的线性组合-差分观测值trop ion V V t C λN φ-+∆⋅=⋅+)(tropion s R V V T t C -+-⋅=)(tropion tS tR V V V C V C λN R λφ-+⋅-⋅+⋅-=⋅tropion tS tR S S S V V V C V C λN Z Z Y Y X X -+⋅-⋅+⋅--+-+-=222)()()(①站间差分:同步观测值在接收机间求差在A、B两站同步观测相同的GPS卫星,由A点所测相位与由B点所测相位相减,卫星钟差抵消。
伪距载波相位多普勒-回复伪距、载波相位和多普勒是在导航和通信等领域中使用的重要概念。
本文将从基础概念、原理和应用三个方面,依次介绍伪距、载波相位和多普勒的相关知识。
一、基础概念1. 伪距(Pseudorange)伪距是指卫星信号从发射到接收之间所经过的时间乘以光速,再加上发射信号时钟误差的修正值。
简而言之,伪距就是卫星信号传播的距离。
2. 载波相位(Carrier Phase)载波相位是指卫星信号的频率相位差,即卫星信号到接收器之间的相位延迟。
3. 多普勒效应(Doppler Effect)多普勒效应是指当移动接收器相对于发射源或反之移动时,接收到的信号频率将发生变化。
当接收器朝向发射源移动时,接收到的信号频率会比实际频率高,而当接收器远离发射源时,接收到的信号频率会比实际频率低。
二、原理1. 伪距的原理伪距原理是基于时间的测量,利用卫星发射信号的到达时间与接收器接收到信号的时间差来计算距离。
接收器通过测量收到信号的时间差和接收的信号速度(光速),就可以计算出卫星与接收器之间的距离。
2. 载波相位的原理载波相位原理是基于相位的测量,利用接收到的卫星信号相位变化来计算距离。
接收器通过测量信号到达时的相位延迟,然后将其转换为距离。
需要注意的是,由于载波相位的值是一个循环变量,因此需要使用相位差来计算距离。
3. 多普勒的原理多普勒效应原理是基于频率的测量,利用接收到的卫星信号频率的变化来计算相对速度。
当接收器相对于发射源移动时,接收到的信号频率会发生变化。
通过测量频率变化的大小和方向,可以得到接收器与发射源之间的相对速度。
三、应用1. 伪距的应用伪距广泛应用于全球定位系统(GPS)和其他导航系统中。
通过测量多个卫星信号的伪距,接收器可以使用三边定位或多边定位算法来确定自身的位置。
此外,伪距还可以用于时间同步和测量导航信号的传播延迟等方面。
2. 载波相位的应用载波相位主要应用于高精度定位和测量等领域。
由于载波相位精度更高,相比伪距更适合进行高精度的测量和定位。
DGPS原理以及GPS系统的特点知识介绍DGPS原理目前GPS系统提供的定位精度是优于10米,而为得到更高的定位精度,我们通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。
根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。
用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。
差分GPS分为两大类:伪距差分和载波相位差分1.伪距差分原理这是应用最广的一种差分。
在基准站上,观测所有卫星,根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。
再与测得的伪距比较,得出伪距改正数,将其传输至用户接收机,提高定位精度。
这种差分,能得到米级定位精度,如沿海广泛使用的“信标差分”2.载波相位差分原理载波相位差分技术又称RTK(Real Time Kinematic)技术,是实时处理两个测站载波相位观测量的差分方法。
即是将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
载波相位差分可使定位精度达到厘米级。
大量应用于动态需要高精度位置的领域。
GPS系统的特点GPS系统具有全天候、全方位、高精度、多用途以及方便快捷高效等特点。
1)全天候:指野外观测可不受时间的限制。
不论白天黑夜、刮风下雨、夏暖冬寒,均可获得满意的观测效果。
2)全方位:指野外作业不受空间的限制,只要能同时接收到四颗以上卫星的信号,即可进行定位。
不要求测站间互相通视,可在陆地、海上、水上、空中(航测)测量定位。
既可静态观测,也可动态观测。
3)高精度:单频GPS接收机静态测量(后处理)精度可达±5mm+2ppm·D。
双频GPS 接收机静态测量精度可达±5mm+1ppm·D。
实时动态测量(RTK)精度可达±20mm+2ppm·D。
4)多用途:不仅用于测量定位,还可用于导航以及测速和授时。
全球定位系统的伪距定位原理全球定位系统(GPS)是一种基于卫星技术的导航系统,可用于定位、导航和时间与频率同步等应用。
GPS通过将地球上的接收器与位于空间的卫星建立连接,使用雷达测距原理进行定位。
伪距定位原理是GPS定位技术的基础,下面我们将详细介绍GPS伪距定位原理。
一、GPS卫星系统GPS卫星系统由31颗卫星组成,其中24颗卫星用于定位和导航,3颗卫星用于备份,4颗卫星则用于维护系统正常运行。
每个GPS卫星都会发送一个包含时间和位置信息的无线电信号,地面接收器可以通过这个信号定位自己的位置。
GPS卫星系统是由美国国防部开发的,因此只有美国政府可以控制和维护这个系统。
二、伪距测量原理伪距测量原理是GPS确定位置的基础。
首先,GPS接收器向卫星发送请求,等待卫星发送信号,该信号会在接收器上生成一个时间戳。
然后,GPS接收器计算从卫星发射信号到接收器接收信号之间的时间差(也称为传输时间延迟)。
接着,GPS接收器将信号的传输时间延迟与信号速度进行乘积运算,即可获得与卫星之间距离的伪距。
在接收到多个卫星信号后,GPS接收器会将伪距值与卫星位置信息一起计算,通过交叉定位法确定自己的位置。
这个过程需要至少接收到4个卫星信号,因为每个卫星的信号可以提供3个未知量(即x轴、y轴和z轴坐标)。
在接收到4个或更多卫星信号后,GPS接收器可以用交叉定位法计算出自己的位置。
三、误差来源1. 星历误差:由于GPS卫星的轨道不是完美的圆形,因此卫星位置信息可能不精确。
此外,地球的引力和其他因素也可能导致卫星位置信息的变化。
2. 信号传播误差:GPS信号在传播过程中可能会受到多种因素的影响,如大气层中的电离和折射、建筑物和山脉的遮阻,以及信号反射和多次传播等。
3. 接收器误差:GPS接收器的精度也可能会受制于各种因素,如接收器的质量、天线的方向和环境噪声等。
4. 时间误差:接收器和卫星之间的时间差也可能会影响GPS定位的精度。
载波相位平滑伪距原理
载波相位平滑伪距原理是一种导航定位技术,它基于卫星载波信号的相位变化来进行测量和跟踪。
具体原理如下:
1. 信号接收:接收到的GPS卫星信号经过天线接收,然后通过射频前端进行放大和转换。
2. 载波相位测量:通过对接收到的GPS卫星信号进行解调和相位测量,得到不同卫星的载波相位信息。
3. 伪距计算:根据测量得到的载波相位信息,结合已知的卫星位置信息和观测站的位置信息,计算得到每颗卫星与观测站之间的伪距。
4. 相位平滑:由于载波相位测量的误差较大,需要进行平滑处理来提高定位精度。
相位平滑是通过连续测量多个时刻的载波相位来提高测量精度,消除测量误差。
5. 伪距平滑计算:通过相位平滑处理得到的载波相位,结合已知的卫星位置信息和观测站的位置信息,计算得到平滑后的伪距。
6. 定位计算:通过观测到的卫星伪距和平滑伪距,结合已知的卫星位置信息和观测站的位置信息,使用定位算法进行定位计算,得到观测站的位置。
通过载波相位平滑伪距原理,可以实现高精度的导航定位,适用于航空、航海、地面车辆导航等应用领域。
伪距和载波相位观测方程异同点伪距观测和载波相位观测是在全球定位系统(GPS)中常用的测量方法。
它们在测量距离和位置时有着不同的原理和特点。
我们来看一下伪距观测。
伪距观测是通过测量卫星和接收机之间的信号传播时间来计算距离的方法。
接收机接收到来自卫星的信号后,会记录下信号的到达时间,并与卫星发送信号的时间进行比较。
通过乘以光速,就可以得到从接收机到卫星的距离。
伪距观测的优点是测量简单、实时性好,且不需要太多复杂的计算。
然而,由于伪距观测只是通过测量信号传播时间来计算距离,而没有考虑信号传播过程中的误差和干扰,因此精度相对较低。
接下来,我们来看一下载波相位观测。
载波相位观测是通过测量接收机接收到的卫星信号的相位差来计算距离的方法。
具体来说,接收机会记录下信号的相位,然后与卫星发送信号的相位进行比较。
通过计算相位差,乘以波长,就可以得到从接收机到卫星的距离。
载波相位观测的优点是精度高,可以达到亚米级的测量精度。
然而,载波相位观测需要考虑许多因素,如信号传播过程中的大气延迟、多路径效应等,因此需要进行更复杂的计算和误差校正。
伪距观测和载波相位观测在原理和应用上存在一些异同点。
首先,两种观测方法都可以用于计算接收机到卫星的距离,从而确定接收机的位置。
然而,伪距观测只是通过测量信号传播时间来计算距离,而载波相位观测则是通过测量信号的相位差来计算距离,因此载波相位观测的精度更高。
两种观测方法在误差和干扰方面也存在差异。
伪距观测只考虑了信号传播时间的误差,没有考虑其他因素的影响,因此精度相对较低。
而载波相位观测需要考虑多个因素,如大气延迟、多路径效应等,需要进行更复杂的计算和误差校正,但可以获得更高的精度。
两种观测方法在实际应用中也存在一些差异。
伪距观测相对简单,实时性好,因此在导航和定位系统中被广泛使用。
而载波相位观测虽然精度更高,但需要进行更复杂的计算和误差校正,因此在一些高精度测量领域中应用较多,如地质勘探、测绘等。