载波相位观测方程
- 格式:ppt
- 大小:1.02 MB
- 文档页数:83

GPS期末考试复习题填空题名词解释1、天球:以地球质心M为球心,以任意长为半径的假想球体。
2、春分点:当太阳在黄道上从天球南半球向北半球运行时,黄道与天球赤道的交点称为春分点。
3、章动:由于月球轨道和月地距离的变化,使实际北天极沿椭圆形轨道绕瞬时平北天极旋转的现象。
4、WGS-84坐标系:(World Geodical System-84)由美国国防部制图局建立协议地球坐标系,是GPS所采用的坐标系统。
坐标系原点位于地球的质心;Z轴指向定义的协议地球极方向;X轴指向起始子午面与赤道的交点;Y轴位于赤道面上,且按右手与X轴呈90°夹角。
5、预报星历:监控数据时间序列外推估注入的卫星轨道参数。
6、精密星历:为了满足大地测量学和地球动力学对高精度定位的要求,一些国家的有关部门,根据各自建立的GPS卫星跟踪站所获得的GPS卫星精密观测资料,采用确定预报星历的相似的方法,计算出任一时刻的卫星星历。
目前,这样的组织至少有两个:一个是美国国防制图局(DMA),另一个是国际GPS动力学服务IGS(International GPS service for geodynamics)。
7、星钟的数据龄期:从作预报星历的最后观测时间到第一数据块的参考时间之间的时段。
8、绝对定位:也叫单点定位,即利用GPS卫星和用户接收机之间的距离观测值直接确定用户接收机天线在WGS-84坐标系中相对于坐标系原点(地球质心)的绝对位置。
9、伪随机码:伪随机码是一个具有一定周期的取值0和1的离散符号串。
它不仅具有高斯噪声所有的良好的自相关特性,而且具有某种确定的编码规则。
10、伪距:由卫星发射的测距码信号到达GPS接收机的传播时间乘以光速所得的量测距离。
该距离受钟差和信号延迟影响,测量的实际距离和卫星到接收机的几何距离有一定差值,称量测距离为伪距。
11、伪距法:将整周未知数当作平差中的待定参数多普勒法快速确定整周未知数法12、屏幕扫描法:用高次差或多项式拟合法在卫星间求差法双频观测值修复法平差后残差修复法13、双差实数解:理论上整周未知数N是一整数,但平差解算得的是一实数,称为双差实数解。
载波相位方程推导1. 推导载波相位双差观测量观测方程的线性化表达式载波相位双差观测方程的一般形式为:()()()()()1,22122111,21,21,22121k k k k k k k k i i i i i i i i i i DD O SD O SD O O O O O =-=---如果以载波相位作为观测量,并且考虑各种误差对于方程的影响,则有如下形式的观测方程:.()()()()1,2221121211,221222211k k k k k k k k k k i i i i i i j i i i i ion trop pDD j N N N N dd j dd dd λρρρρλδδΦ=--++--+-++若在GPS 标准时s τ,卫星钟面时s t ,卫星发射的载波相位为)(s st Φ,在GPS标准时r τ,接收机钟面时r t ,接收机接收到卫星在时刻s τ发射的信号,接收机产生的参考信号的相位为)(r r t Φ。
设:0()j X t 为卫星js 于历元t 的坐标近似值向量i X 为观测站的坐标i T近似值向量()[(),(),()]Ti i i i X t x t y t z t δδδδ=为接收机坐标的改正数向量则有:12222()(){[()][()][()]}j j j j ji i i i i t t x t x y t y z t z ρρρ=-=-+-+-则载波相位观测量观测方程为:(,)(,)[()()]s s sr r s r r s s s r r r t t t t c t t t t N ρρδδλ=+-+然后分别对x,y,z 求偏导:000000000()1[()]()()()1[()]()()()1[()]()()j j j i i i ji i j j j i i i j ii j j j ii i j ii t x t x l t x t t y t y m t y t t z t z n t z t ρρρρρρ⎧∂=-=⎪∂⎪⎪∂⎪=-=⎨∂⎪⎪∂=-=⎪∂⎪⎩()i j jj 0i i i i i ()()m n ++()j j s i i r r s X t t l Y N t t c Z δρρδλδδδ⎛⎫ ⎪=+- ⎪ ⎪⎝⎭考虑其他误差因素的影响,则单个测站载波相位观测方程线性化结果为:()i j jj i i i i i (,)(,)-m n ()s s s r r s r r s r s r ion tro tide mul rel X t t t t l Y t t c N Z δρρδδδλδδδδδεδ⎛⎫ ⎪=+-+++++++ ⎪ ⎪⎝⎭因为单差是两个测站在同一历元对同一颗卫星观测量之差值,所以载波相位单差观测方程线性化为:()()i0i1k 01j j j j j j i0,i101i0i0i0i0i1i1i1i1i0i10101(,)-(,)-m n m n ()(-)d d d s s r r s r r s s s r r r r ion tro X X SD t t t t l Y l Y Z Z t t c N N δδρρδδδδδδλλδδε⎛⎫⎛⎫⎪ ⎪=++ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭-++++ 双差是两个测站对两颗卫星的单差做差,对两个方程进行做差计算,则卫星双差观测方程为:k1,k211221221i0,i101100101(,)-(,)-(,)(,)(--)k k k k k k k k i r s i r s i r s i r s i i i i ion tro DD t t t t t t t t N N N N dd dd dd ρρρρλδδε=++++++对上式进行线性化处理,得:()()()()01k1,k21122k1k1k1k1k1k1i0,i10110i0i0i00i1i1i110101k2k2k2k2k2k2i0i0i00i1i1i1101(,)-(,)-(,)(,)-m n m n -m n m n k k k k i r s i r s i r s i r s X X DD t t t t t t t t l Y l Y Z Z X X lY l Y Z Z δδρρρρδδδδδδδδδδ⎛⎫⎛⎫ ⎪ ⎪=++ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎛⎫⎛⎫ ⎪ + ⎪ ⎪ ⎝⎭⎝12210101(--)k k k k i i i i ion tro N N N N dd dd dd λδδε⎪+++++⎪⎪⎭。

载波相位测量作者:周晓林利用测距码进行伪距测量是全球定位系统的基本测距方法。
然而由于测距码的码元长度较大,对于一些高精度应用来讲其测距精度还显得过低无法满足需要。
如果观测精度均取至测距码波长的百分之一,则伪距测量对P码而言量测精度为30cm,对C/A码而言为3cm左右。
而如果把载波作为量测信号,由于载波的波长短所以就可达到很高的精度。
目前的大地型接收机的载波相位测量精度一般为1~2mm,有的精度更高。
但载波信号是一种周期性的正弦信号,而相位测量又只能测定其不足一个波长的部分,因而存在着整周数不确定性的问题,使解算过程变得比较复杂。
在GPS信号中由于已用相位调整的方法在载波上调制了测距码和导航电文,因而接收到的载波的相位已不再连续,所以在进行载波相位测量以前,首先要进行解调工作,设法将调制在载波上的测距码和卫星电文去掉,重新获取载波,这一工作称为重建载波。
重建载波一般可采用两种方法,一种是码相关法,另一种是平方法。
采用前者,用户可同时提取测距信号和卫星电文,但用户必须知道测距码的结构;采用后者,用户无须掌握测踉码的结构,但只能获得载波信号而无法获得测距码和卫星电文。
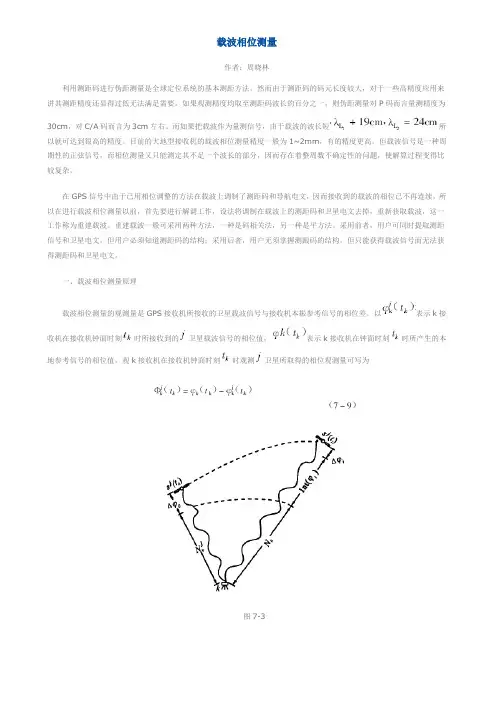
一、载波相位测量原理载波相位测量的观测量是GPS接收机所接收的卫星载波信号与接收机本振参考信号的相位差。
以表示k接收机在接收机钟面时刻时所接收到的卫星载波信号的相位值,表示k接收机在钟面时刻时所产生的本地参考信号的相位值,观k接收机在接收机钟面时刻时观测卫星所取得的相位观测量可写为图7-3通常的相位或相位差测量只是测出一周以内的相位值。
实际测量中,如果对整周进行计数,则自某一初始取样时刻以后就可以取得连续的相位测量值。
如图7-3在初始时刻,测得小于一周的相位差为,其整周数为,此时包含整周数的相位观测值应为接收机继续跟踪卫星信号,不断测定小于一周的相位差,并利用整波计数器记录从到时间内的整周数变化量,只要卫星从到之间卫星信号没有中断,则初始时刻整周模糊度就为一常数,这样,任一时刻卫星到# 接收机的相位差为上武说明,从第一次开始,在以后的观测中,其观测量包括了相位差的小数部分和累计的整周数。
、名词解释1、 岁差:地球在绕太阳运行时,地球自转轴的方向在天球上缓慢移动,春分点在黄道上 随之慢慢移动章动:在岁差的基础上还存在各种大小和周期各不相同的微小的周期性变化2、 WGS-84坐标系:美国国防部 1984年世界大地坐标系,属于协议地球坐标系3、 卫星星历:描述有关卫星轨道的信息4、 自相关系数:R (t )=(Au-Bu )/(Au+Bu )Au 为相同码元数 Bu 为相异码元数5、 重建载波:在进行载波相位测量前,首先要进行解调工作,设法将调制在载波上的测 距码和导航电文去掉,重新恢复载波,这一工作叫重建载波6、 相对定位:确定同步跟踪相同的GPS 卫星信号的若干台接收机之间的相对位置(坐标 差)的定位方法7、 伪距:p =T *c 距离p 并不等于卫星至地面测站的真正距离,叫伪距&整周跳变:如果由于某种原因使计数器无法连续计数,那么信号被重新跟踪后,整周计数器中将丢失某一量而变得不正确。
而不足一整周的部分 Fr ( $ )由于是一个瞬时量测值,因而仍是正确的,这种现象叫整周跳变9、 整周未知数:是在全球定位系统技术的载波相位测量时,载波相位与基准相位之 间相位差的首观测值所对应的整周未知数10、 P DOP 值:空间位置精度因子11、 相对论效应:是由于卫星钟和接收机钟所处的状态(速度和重力位)不同而引起卫星 钟和接收机钟产生相对钟误差的现象12、 数学同步误差:加上改正数工八一「心 "二二」后的卫星钟读数和 GPS 标准时间之差称为数学同步误差13、 平均相位中心:天线瞬时相位中心的平均值14、 独立基线:两台接收机得到的多余观测边以外的必要基线15、异步环闭合差不是完全由同步观测基线所组成的闭合环称为异步环,异步环的闭合差 16、 基线解算:利用多个测站的 GPS 同步观测数据,获得这些测站之间坐标差的过程17、 网平差:将基线结果再当成数据18、 约束平差:平差时所采用的观测值完全是GPS 观测值(即GPS 基线向量),而且, 在平差时引入了使得 GPS 网产生由非观测量所引起的变形的外部起算数据。

载波相位观测方程 -回复载波相位观测方程是指用于测量卫星信号传输时间和距离的方程。
在卫星导航领域中,精确测量卫星和接收机之间的距离非常重要,因为这可以确定接收机的具体位置。
为了测量距离,我们必须先知道卫星发射信号的到达时间和到达接收机的时间差。
载波相位观测方程就是为了测量这个时间差而出现的。
下面是载波相位观测方程的公式和具体解释。
载波相位观测方程公式如下:Φ = 2π (f_c/f_0) (R + ΔR) / c + Nλ + I其中,Φ是载波相位观测值,f_c是载波频率,f_0是参考频率(通常为卫星的发射频率或GPS标准频率),R是测量卫星到接收机的距离,ΔR是由于信号传播途中大气层折射引起的延迟距离,c是光速,N是整数,λ是波长,I是接收机硬件偏移值。
在这个公式中,我们可以看到,载波相位观测值由四个主要部分组成。
第一个部分(2π (f_c/f_0) (R + ΔR) / c)是半个周期(π)的载波相位差,它是由于接收机和卫星之间的距离差异引起的。
第二个部分(Nλ)是N个波长的相位差,它是由于波长整数倍的周期性变化引起的。
第三个部分(I)是接收机硬件偏移,通常称为缓冲区偏移或接收器的不精确延迟。
第四个部分(ΔR)是由于信号穿过大气层时受到的折射影响引起的。
这个部分通常是无法准确测量的,因为它受到大气条件的影响,而这些条件在不同的位置和时间下会有所不同。
载波相位观测方程是一种用于测量距离的工具,它有很高的精度。
在卫星导航系统中,这个方程是用于测量GPS和其他导航系统信号传输的时间差,确定接收机的位置。
载波相位观测方程还可以用于其他无线通讯系统中,如无线电视、无线电收音机等。
在实际应用中,我们要结合载波相位观测方程和其他数据来进行准确的距离测量,以达到高精度的定位和导航目的。
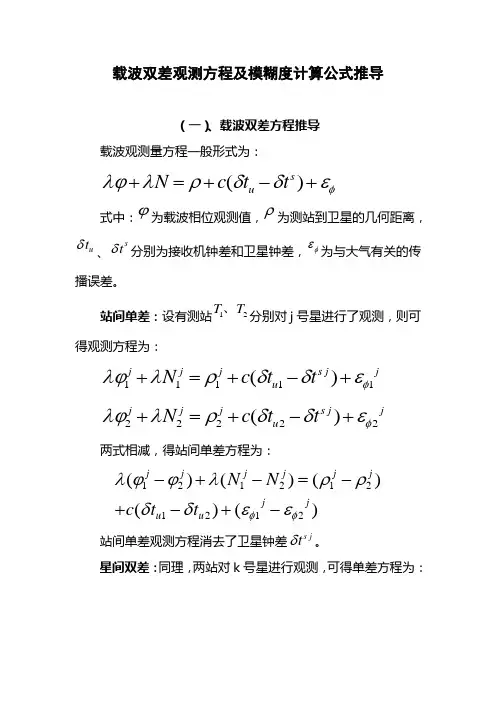
载波双差观测方程及模糊度计算公式推导(一)、载波双差方程推导载波观测量方程一般形式为:()s u N c t t φλϕλρδδε+=+-+式中:ϕ为载波相位观测值,ρ为测站到卫星的几何距离,u t δ、s t δ分别为接收机钟差和卫星钟差,φε为与大气有关的传播误差。
站间单差:设有测站12T T 、分别对j 号星进行了观测,则可得观测方程为:11111()j j j s j j u N c t t φλϕλρδδε+=+-+22222()j j j s j ju N c t t φλϕλρδδε+=+-+两式相减,得站间单差方程为:1212121212()()()()()jj j j j j j j u u N N c t t φφλϕϕλρρδδεε-+-=-+-+-站间单差观测方程消去了卫星钟差s jtδ。
星间双差:同理,两站对k 号星进行观测,可得单差方程为:1112121212()()()()()k k k k k k kku u N N c t t φφλϕϕλρρδδεε-+-=-+-+-两式相减,得到站间单差后的星间双差表达式为:1212121212121212[()()][()()]()()()()j j k k j j k kjj k k j jk kN N N N φφφφλϕϕϕϕλρρρρεεεε---+---=---+--- 星间双差消去了接收机钟差u t δ,故双差观测方程中不含卫星和接收机钟差影响。
式中:1212[()()]j j k k ϕϕϕϕ---为双差载波相位观测值,用j kϕ∆∇表示;1212()()j j k kρρρρ---为接收机到卫星几何距离的双差值,用jkρ∆∇表示;1212()()j j k k φφφφεεεε---为与大气有关延迟的双差观测值,短基线(<1km )情况下,可以近似为0,长基线情况下,要考虑电离层延迟,用LC 组合观测消除,以下公式推导默认为短基线情况。
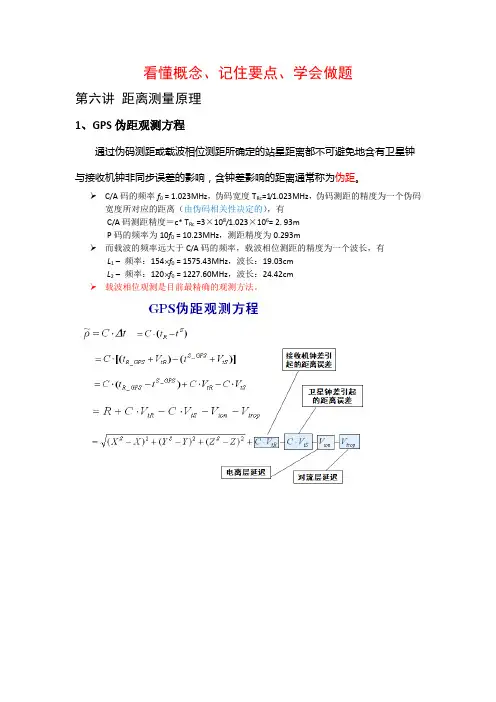
看懂概念、记住要点、学会做题第六讲距离测量原理1、GPS伪距观测方程通过伪码测距或载波相位测距所确定的站星距离都不可避免地含有卫星钟与接收机钟非同步误差的影响,含钟差影响的距离通常称为伪距。
➢C/A码的频率f0 = 1.023MHz,伪码宽度T Rc=1/1.023MHz,伪码测距的精度为一个伪码宽度所对应的距离(由伪码相关性决定的),有C/A码测距精度=c* T Rc =3×108/1.023×106= 2. 93mP码的频率为10f0 = 10.23MHz,测距精度为0.293m➢而载波的频率远大于C/A码的频率,载波相位测距的精度为一个波长,有L1–频率:154⨯f0 = 1575.43MHz,波长:19.03cmL2–频率:120⨯f0 = 1227.60MHz,波长:24.42cm➢载波相位观测是目前最精确的观测方法。
2、载波相位测量原理测量接收机接收到的具有多普勒频移的载波信号,与接收机产生的参考载波信号之间的相位差。
ϕSϕRρ=λ(ϕ-ϕS R )ϕSϕRΦ()t R Φ(t S 接收机根据自身的钟在时刻复制信号的相位t R 接收机根据自身的钟在时刻所接收到卫星在时刻所发送信号的相位t R t Sρ=λ(Φ()-)t R Φ()t S(理想情况) (实际情况)载波相位测量的观测方程有三种类型的线性组合:➢ 同类型同频率观测值的线性组合 ➢ 同类型不同频率观测值的线性组合 ➢ 不同类型的双频观测值的线性组合(1)同类型同频率观测值的线性组合-差分观测值trop ion V V t C λN φ-+∆⋅=⋅+)(tropion s R V V T t C -+-⋅=)(tropion tS tR V V V C V C λN R λφ-+⋅-⋅+⋅-=⋅tropion tS tR S S S V V V C V C λN Z Z Y Y X X -+⋅-⋅+⋅--+-+-=222)()()(①站间差分:同步观测值在接收机间求差在A、B两站同步观测相同的GPS卫星,由A点所测相位与由B点所测相位相减,卫星钟差抵消。
GPS思考题及参考答案1.L1载波上没有P码信息。
(×)L1载波上有P码信息,用于捕获P码2.精密星历可以用于实时导航之中。
(×)精密星历是后处理星历,不能用于实时导航中3.WGS-84是一种协议坐标系。
(√)4.GPS相对定位中至少需要两台接收机。
(√)5.LADGPS是局部区域差分系统的简称。
(√)6.天球坐标系和地球坐标系无关,因此常用天球坐标系描述卫星的位置。
(√)7.从时间系统的实质来说,GPS时间系统是一种原子时。
(√)8.GPS载波相位观测值在接收机间求差可以消除接收机的钟差。
(×)GPS载波相位观测值在星站二次差分可以消除接收机的钟差。
9.在平面控制中,地方坐标系和WGS84存在着一定的关系,一般是先进行旋转后平移,实现两坐标的转换。
(×)在平面控制中,地方坐标系和WGS84存在着一定的关系,一般是先进行平移后旋转,实现两坐标的转换。
10、在观测中要求卫星高度角的目的主要是减弱电磁波在大气层传播的误差。
(√)11、地球自转轴长周期变化,引起黄道缓慢变化,称为岁差。
(√)12.升交点的赤径,轨道的倾角,唯一的确定了卫星轨道平面和地球体的相对定位。
(√)13.GPS中定位中获得的是大地高,可以直接纳入我国高程系统。
(×)GPS中定位中获得的是大地高,不可以直接纳入我国高程系统。
14.地球瞬时自转轴在天球上随时间而变,称极移。
(×)地球瞬时自转轴在地球上随时间而变,称极移。
15.GPS定位结果的转换可以在约束平差过程中实现。
(√)16.WGS84坐标系是一种理论坐标系。
(×)WGS84坐标系是一种协议坐标系。
17. 实时导航中可以使用精密星历。
(×)实时导航中使用广播星历。
18. GPS网平差是以野外原始观测数据值为基本观测量。
(×)GPS网平差是以基线解算后获得的基线向量为基本观测量。
19.不同的坐标系之间一般存在着平移和旋转关系。
GPS载波相位测量【摘要】利用GPS进行导航和测量定位,都必须要利用GPS接收机接收GPS信号。
对载波(L1或L2载波)相位进行量测,获得载波相位观测值。
利用这些观测值的不同组合(求差)进行相对定位,可以有效地消除或减弱相关误差的影响,从而提高精度。
利用载波相位测量的二次差分观测值解算基线向量的方法及数学模型已成为大多数GPS基线处理软件包中必选的模型。
【关键词】载波相位;重建载波;差分观测值;平差模型;精度评定0.引言载波相位测量是测量接收机接收到的具有多普勒频移的载波信号,与接收机产生的参考载波信号之间的相位差,通过相位差来求解接收机位置。
由于载波的波长远小于码长,C/A码码元宽度293m,P 码码元宽度29.3m,而L1载波波长为19.03cm,L2载波波长为24.42cm,在分辨率相同的情况下,L1载波的观测误差约为2.0mm,L2载波的观测误差约为2.5mm。
而C/A码观测精度为2.9m,P码为0.29m。
载波相位观测是目前最精确的观测方法。
1.载波相位测量原理GPS卫星信号接收机接收到的来自GPS卫星的载波信号是一个调制信号,因为GPS卫星在发射载波信号时己经将测距码信号和数据码(导航电文)信号调制到了载波信号上这一过程通常称为信号的调制。
因而接收到的载波的相位己不再连续,所以在进行载波相位测量以前,首先要进行解调工作,即利用一定的方法将调制在载波上的测距码和卫星电文去掉,重新获取载波,这一工作称为重建载波。
重建载波一般可采用两种方法,一种是码相关法,另外一种是平方法。
采用前者,用户可同时提取测距信号和卫星电文,但用户必须知道测距码的结构;采用后者,用户无需掌握测距码的结构,但只能获取载波信号而无法获得测距码和卫星电文。
GPS载波动态相对定位目前的实现方法有两种,第一种方法:参考站向移动站发送原始观测数据,在移动站上进行卫星之间和测站之间的双差处理,求解移动站的三维位置信息,这种方法对差分系统数据链要求很高,移动站上计算量很大。
第22卷第4期测 绘 工 程Vol.22,No.42013年8月Engineering of Surveying and MappingAug.,2013网络RTK模式下多频载波相位观测值解算整周模糊度伍 岳1,邱 蕾2(1.三峡大学土木与建筑学院,湖北宜昌443002;2.深圳市地籍测绘大队,广东深圳518034)摘 要:在GPS现代化下,研究多频卫星导航定位的关键技术,利用现有的双频观测值去模拟L5载波相位观测值,然后根据网络RTK基准站连续观测的特点,利用基准站坐标精确已知的条件,研究多频模式下基准站间的整周模糊度求解。
通过分析,在不同基线长度下,多频模式下的基准站间模糊度求解比双频模式下更加可靠,求解整周模糊度更加便捷。
关键词:多频;网络RTK;整周模糊度中图分类号:P228.4 文献标志码:A 文章编号:1006-7949(2013)04-0001-04Ambiguity resolution to multi-frequency carrier phaseobservations under RTK ModeWU Yue1,QIU Lei 2(1.College of Civil Engineering and Architeeture,Three Gorges University,Yichang 443002,China;2.Shenzhen RegionalMapping and Surveying Division,Shenzhen 518034,China)Abstract:The key technologies of multi-frequency ambiguity resolutions are studied under GPSmodernization.The L5carrier phase observations are simulated by using the existing dual-frequencyobservations.Then according to the characteristics of the continuous observations of network RTK,theambiguities between base stations are resolved by use of multi-frequency.By analyzing the differentbaseline length,ambiguity resolutions in multi-frequency mode are more reliable and more convenient.Key words:multi-frequency;network RTK;ambiguity resolution收稿日期:2012-03-13基金项目:国家自然科学基金资助项目(41004010)作者简介:伍 岳(1977-),男,副教授,博士.利用GPS进行高精度导航定位的前提是准确确定载波相位观测值的整周模糊度。