GPS载波相位测量
- 格式:doc
- 大小:219.50 KB
- 文档页数:5



7.4 整周跳变的探测与修复GPS 载波相位测量,只能测量载波滞后相位1周以内的小数部分,不能测量载波滞后相位的整周数)(0N 。
其后的载波滞后相位整周数变化值(始后周数),是通过多普勒积分由电子计数器累计读得的。
由于GPS 信号接收机自身故障或GPS 信号意外中断,导致载波锁相环路的短暂失锁,而引起多普勒计数的短暂中断;当载波锁相环路重新锁定后,多普勒计数又重新开始,以致造成载波滞后相位整周数变化值(始后周数)的不连续计数。
这种多普勒计数的中断现象,称为整周跳变,简称为周跳(cycle slip )。
当GPS 载波相位观测值没有发生周跳时,卫星一次通过的载波滞后相位整周数是连续的,各时元(历元)的观测值都会含有一个共同的整周未知数,即时元1t 的整周模糊度0N ,当发生周跳时,其后所有的载波相位观测值都会含有一偏差∆,该偏差就是中断期间所丢失的整周计数,即周跳后的载波相位观测中含有未知数∆+0N 。
所谓周跳的探测就是利用观测的信息来发现周跳。
在探测出周跳后,利用观测信息来估计丢失的周数∆,从而修正周跳后的载波相位观测值,称为周跳的修复。
在探测出周跳之后,也可将∆+0N 视为周跳后的整周模糊度而利用平差的原理解求出这个未知参数,这是一个整周模糊度的求解问题。
静态定位中,由于接收机静止不动,周跳的探测与修复问题已得到了很好的解决。
在动态环境下,由于动态接收机在不断地运动中,周跳的探测与修复比静态定位要困难得多。
由于GPS 信号接收机能提供多种观测信息,利用这些观测信息本身的相互关系(无需轨道信息),可以对周跳进行探测和修复,目前主要有下列方法。
(1)根据有周跳现象的发生将会破坏载波相位测量的观测值ϕϕ∆+)(Int 随时间 而有规律变化的特性来探测周跳(高次差或多项式拟合法)(2)利用载波相位及其变化率的多项式拟合来探测、修复周跳(多项式拟合法); (3)利用伪距和载波相位观测值组合来探测、修复周跳(伪距/载波组合法); (4)利用双频载波相位组合观测值探测、修复周跳(电离层残差法)。
通俗易懂的载波相位测量方法讲解
载波相位测量是一种利用GPS信号来确定两个同步观测站之间位置差的技术。
以下是对其通俗易懂的解释:
1. 了解GPS信号:GPS卫星发射的信号包含有特定的载波频率,当这些信号被地面接收机捕获后,接收机可以测量出信号的相位。
2. 测量载波相位:载波相位指的是信号波峰或波谷在特定时间点的位置。
接收机通过精确测定这些波峰或波谷到达的时间,可以计算出信号传播的距离。
3. 确定观测站间距离:通过比较两个观测站接收到同一GPS信号的相位差异,可以精确计算出这两个站点之间的距离差,这个过程通常称为基线向量解算。
4. 使用差分观测值:为了提高测量精度,实际应用中常采用差分GPS技术,即比较两个不同接收机对同一个卫星信号的相位测量值。
这种方法可以有效消除或减小误差,得到更精确的测量结果。
5. 获得坐标差:最终,通过一系列的计算和数据处理,可以获得两个观测站之间的三维坐标差,这就是载波相位测量的直接成果。
总之,载波相位测量方法因其高精度的特点,广泛应用于地质调查、地震监测、精密农业等领域。
通过这种技术,科学家们能够以厘米级甚至毫米级的精度来测量地表的微小变化。
载波相位测量作者:周晓林利用测距码进行伪距测量是全球定位系统的基本测距方法。
然而由于测距码的码元长度较大,对于一些高精度应用来讲其测距精度还显得过低无法满足需要。
如果观测精度均取至测距码波长的百分之一,则伪距测量对P码而言量测精度为30cm,对C/A码而言为3cm左右。
而如果把载波作为量测信号,由于载波的波长短所以就可达到很高的精度。
目前的大地型接收机的载波相位测量精度一般为1~2mm,有的精度更高。
但载波信号是一种周期性的正弦信号,而相位测量又只能测定其不足一个波长的部分,因而存在着整周数不确定性的问题,使解算过程变得比较复杂。
在GPS信号中由于已用相位调整的方法在载波上调制了测距码和导航电文,因而接收到的载波的相位已不再连续,所以在进行载波相位测量以前,首先要进行解调工作,设法将调制在载波上的测距码和卫星电文去掉,重新获取载波,这一工作称为重建载波。
重建载波一般可采用两种方法,一种是码相关法,另一种是平方法。
采用前者,用户可同时提取测距信号和卫星电文,但用户必须知道测距码的结构;采用后者,用户无须掌握测踉码的结构,但只能获得载波信号而无法获得测距码和卫星电文。
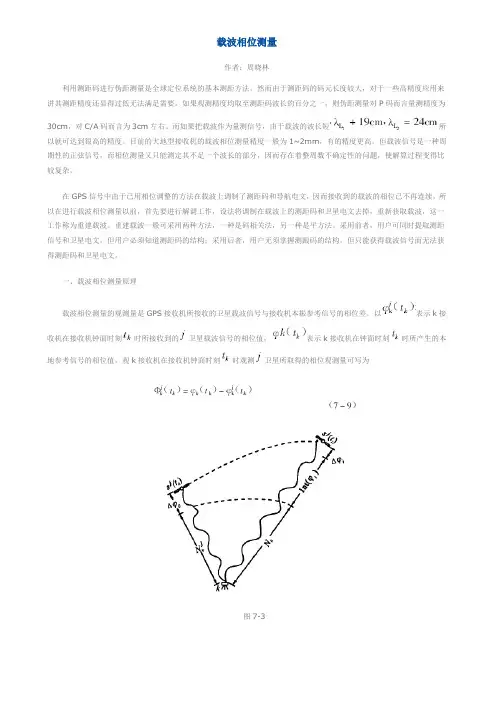
一、载波相位测量原理载波相位测量的观测量是GPS接收机所接收的卫星载波信号与接收机本振参考信号的相位差。
以表示k接收机在接收机钟面时刻时所接收到的卫星载波信号的相位值,表示k接收机在钟面时刻时所产生的本地参考信号的相位值,观k接收机在接收机钟面时刻时观测卫星所取得的相位观测量可写为图7-3通常的相位或相位差测量只是测出一周以内的相位值。
实际测量中,如果对整周进行计数,则自某一初始取样时刻以后就可以取得连续的相位测量值。
如图7-3在初始时刻,测得小于一周的相位差为,其整周数为,此时包含整周数的相位观测值应为接收机继续跟踪卫星信号,不断测定小于一周的相位差,并利用整波计数器记录从到时间内的整周数变化量,只要卫星从到之间卫星信号没有中断,则初始时刻整周模糊度就为一常数,这样,任一时刻卫星到# 接收机的相位差为上武说明,从第一次开始,在以后的观测中,其观测量包括了相位差的小数部分和累计的整周数。
《GPS 定位原理及应用》授课教案第五章 GPS 卫星定位基本原理5.3 载波相位测量定义:载波相位观测值:载波相位应被称为载波拍频相位,它是收到的受多普勒频移影响的卫星信号载波相位与接收机本机振荡产生信号相位之差。
整周模糊度:可记录下相位的变化值,但开始观测时的接收机和卫星振荡器的相位初值是不知道的,起始历元的相位整数也是不知道的,即整周模糊度。
5.3.1 载波相位测量原理载波信号量测精度优于波长的1/100,载波波长(L1=19cm, L2=24cm )比C/A 码波长 (C/A=293m)短得多,所以GPS 测量采用载波相位观测值可以获得比伪距(C/A 码或P 码)定位高得多的成果精度。
5.3.2 载波相位测量的观测方程载波相位基本观测方程: 时刻相位观测值)((初始相位观测值)it Int JN i t j k i t j k i t j k J N t j k )(0)()()(00)0(ϕϕϕϕ++-=Φ+∆=Φ考虑电离层、对流层、钟差影响有:12()() (5-18)jjjk i k i tj tk k f f f t t f f N cccρδδδρδρΦ=+---+5.3.3 整周跳变修复整周跳变:卫星信号被障碍物挡住而暂时中断,或受无线电信号干扰造成失锁,计数器无法连续计数,当信号重新被跟踪后,使整周计数不正确,但不到一整周的相位观测值仍是正确的。
这种现象称为周跳。
整周跳变的探测与修复常用的方法有下列几种: 1. 屏幕扫描法此种方法是由作业人员在计算机屏幕前依次对每个站、每个时段、每个卫星的相位观测值变化率的图像进行逐段检查,观测其变化率是否连续。
如果出现不规则的突然变化时,就说明在相应的相位观测中出现了整周跳变现象。
然后用手工编辑的方法逐点、逐段修复。
2. 用高次差或多项式拟合法此种方法是根据有周跳现象的发生将会破坏载波相位测量的观测值Int(ψ)+Δψ随时间而有规律变化的特性来探测的。
前言:本文主要介绍的是关于《gps载波相位距离测量原理》的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇《gps载波相位距离测量原理》能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!正文:就一般而言我们的gps载波相位距离测量原理具有以下内容:GPS载波相位距离测量原理详解一、引言全球定位系统(GPS)在现代导航和定位技术中占据着核心地位。
其高精度、全天候、全球覆盖的特性使得GPS在军事、民用、科研等多个领域都有广泛的应用。
在GPS定位技术中,载波相位距离测量是一种重要的方法,它能够提供厘米甚至毫米级的定位精度。
本文将对GPS载波相位距离测量原理进行详细介绍。
二、GPS载波相位距离测量的基本概念GPS载波相位距离测量是基于GPS卫星发射的射频信号中的载波相位信息来进行的。
在GPS系统中,每颗卫星都会发射两种频率的射频信号:L1(1.57542 GHz)和L2(1.2276 GHz)。
这些信号由载波、伪随机噪声码(PRN码)和数据码组成。
载波相位距离测量主要关注的是载波信号的相位信息。
三、GPS载波相位距离测量的原理载波相位的定义与观测载波相位是指卫星发射的射频信号中载波波形的瞬时相位角。
在GPS接收机中,通过测量接收到的信号与本地生成的参考信号之间的相位差,可以得到卫星信号的载波相位观测值。
这个相位差包含了卫星到接收机之间的传播时间信息。
载波相位距离计算载波相位观测值不能直接用于计算卫星到接收机的距离,因为观测值中包含了一个未知的整周数(即整数个波长的距离)。
为了得到准确的距离值,需要通过差分技术来消除这个整周数的不确定性。
差分技术主要包括单差、双差和三差。
其中,单差是指两个接收机之间的相位差;双差是指两个频率或两个卫星之间的相位差;三差则是进一步考虑了不同历元之间的相位差。
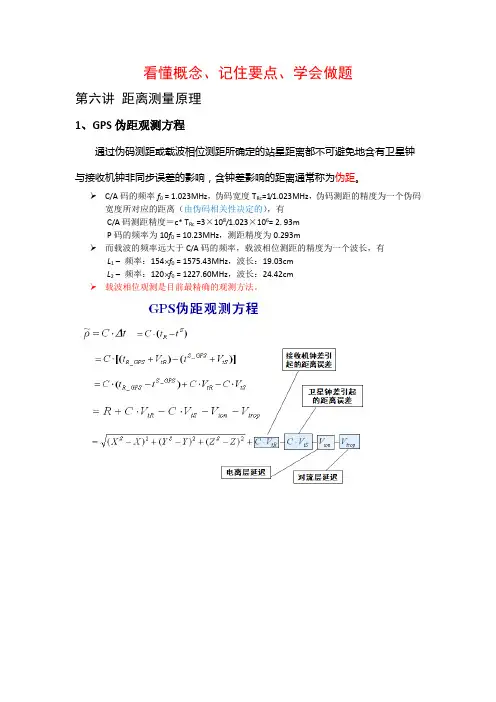
看懂概念、记住要点、学会做题第六讲距离测量原理1、GPS伪距观测方程通过伪码测距或载波相位测距所确定的站星距离都不可避免地含有卫星钟与接收机钟非同步误差的影响,含钟差影响的距离通常称为伪距。
➢C/A码的频率f0 = 1.023MHz,伪码宽度T Rc=1/1.023MHz,伪码测距的精度为一个伪码宽度所对应的距离(由伪码相关性决定的),有C/A码测距精度=c* T Rc =3×108/1.023×106= 2. 93mP码的频率为10f0 = 10.23MHz,测距精度为0.293m➢而载波的频率远大于C/A码的频率,载波相位测距的精度为一个波长,有L1–频率:154⨯f0 = 1575.43MHz,波长:19.03cmL2–频率:120⨯f0 = 1227.60MHz,波长:24.42cm➢载波相位观测是目前最精确的观测方法。
2、载波相位测量原理测量接收机接收到的具有多普勒频移的载波信号,与接收机产生的参考载波信号之间的相位差。
ϕSϕRρ=λ(ϕ-ϕS R )ϕSϕRΦ()t R Φ(t S 接收机根据自身的钟在时刻复制信号的相位t R 接收机根据自身的钟在时刻所接收到卫星在时刻所发送信号的相位t R t Sρ=λ(Φ()-)t R Φ()t S(理想情况) (实际情况)载波相位测量的观测方程有三种类型的线性组合:➢ 同类型同频率观测值的线性组合 ➢ 同类型不同频率观测值的线性组合 ➢ 不同类型的双频观测值的线性组合(1)同类型同频率观测值的线性组合-差分观测值trop ion V V t C λN φ-+∆⋅=⋅+)(tropion s R V V T t C -+-⋅=)(tropion tS tR V V V C V C λN R λφ-+⋅-⋅+⋅-=⋅tropion tS tR S S S V V V C V C λN Z Z Y Y X X -+⋅-⋅+⋅--+-+-=222)()()(①站间差分:同步观测值在接收机间求差在A、B两站同步观测相同的GPS卫星,由A点所测相位与由B点所测相位相减,卫星钟差抵消。
第33卷 第3期测 绘 学 报Vol .33,N o .3 2004年8月A CTA G EO DA ET ICA e t CART OG RA PHICA SI NI CAA ug .,2004 文章编号:1001-1595(2004)03-0210-06中图分类号:P228 文献标识码:AGPS 载波相位测量中的信号多路径效应影响研究袁林果1,黄丁发1,丁晓利2,熊永良1,钟 萍1,李成钢1(1.西南交通大学土木工程学院,四川成都610031;2.香港理工大学,香港九龙)On the Influence of Signal Multipath Effectsin GPS Carrier Phase SurveyingYUAN Lin -guo 1,H UANG Ding -fa 1,DING Xiao -li 2,XIONG Yong -liang 1,ZHONG Ping 1,LI Cheng -gang 1(1.School of Civil Engineering ,Southwest Jiaotong University ,Chengd u 610031,China ;2.T he Hong K ong Poly -technic University ,Hong K ong ,China )A bstract :Recently GPS technique has not only been used for land surveying but also for monito ring applicationsthat requires mo re accurate and reliable baseline solutio ns at millime ter lev el .In these hig h precision GPS applica -tions ,such as structure deformation mo nitoring ,multipath effects could no t be igno red or eliminated by averaging .T he influence of multipath effects in GPS carrier phase surv eying is theoretically analyzed ,the characteristics of sig -nal multipath effects and the effective magnitude of the measurements of carrier -phase are studied .A moving average method of detecting multipa th effects in coo rdinate sequence fo r a short static baseline is presented based o n the pre -vious analy sis ,and some useful results from the experience are summarized .Key words :G PS ;multipath effects ;carrier phase surveying ;moving average 摘 要:当利用GPS 进行高精度变形监测时,GPS 信号的多路径效应成为影响GPS 变形监测精度和可靠性的一种不可忽略的误差源。
GPS载波相位测量【摘要】利用GPS进行导航和测量定位,都必须要利用GPS接收机接收GPS信号。
对载波(L1或L2载波)相位进行量测,获得载波相位观测值。
利用这些观测值的不同组合(求差)进行相对定位,可以有效地消除或减弱相关误差的影响,从而提高精度。
利用载波相位测量的二次差分观测值解算基线向量的方法及数学模型已成为大多数GPS基线处理软件包中必选的模型。
【关键词】载波相位;重建载波;差分观测值;平差模型;精度评定0.引言载波相位测量是测量接收机接收到的具有多普勒频移的载波信号,与接收机产生的参考载波信号之间的相位差,通过相位差来求解接收机位置。
由于载波的波长远小于码长,C/A码码元宽度293m,P 码码元宽度29.3m,而L1载波波长为19.03cm,L2载波波长为24.42cm,在分辨率相同的情况下,L1载波的观测误差约为2.0mm,L2载波的观测误差约为2.5mm。
而C/A码观测精度为2.9m,P码为0.29m。
载波相位观测是目前最精确的观测方法。
1.载波相位测量原理GPS卫星信号接收机接收到的来自GPS卫星的载波信号是一个调制信号,因为GPS卫星在发射载波信号时己经将测距码信号和数据码(导航电文)信号调制到了载波信号上这一过程通常称为信号的调制。
因而接收到的载波的相位己不再连续,所以在进行载波相位测量以前,首先要进行解调工作,即利用一定的方法将调制在载波上的测距码和卫星电文去掉,重新获取载波,这一工作称为重建载波。
重建载波一般可采用两种方法,一种是码相关法,另外一种是平方法。
采用前者,用户可同时提取测距信号和卫星电文,但用户必须知道测距码的结构;采用后者,用户无需掌握测距码的结构,但只能获取载波信号而无法获得测距码和卫星电文。
GPS载波动态相对定位目前的实现方法有两种,第一种方法:参考站向移动站发送原始观测数据,在移动站上进行卫星之间和测站之间的双差处理,求解移动站的三维位置信息,这种方法对差分系统数据链要求很高,移动站上计算量很大。
GPS 载波相位测量 2.1 综述
GPS 测姿定向技术就是利用GPS 接收机对载体(GPS 天线的负载平台)的姿态进行测量。
其原理是通过GPS 天线接收机GPS 卫星信号,测量不同天线的相对位置在当地水平坐标系中的表示,并结合天线在载体坐标系中的已知安装关系,确定出载体坐标系相对当地水平坐标系的姿态。
GPS 测量技术一般来讲包括以下三类:伪距测量技术、载波相位测量技术和多普勒测量技术。
由于GPS 载波频率高(其两种载波频率分别为1
1575.42L f MHz =、21227.6L f MHz =)、波长短(1
19.05L cm λ=、
2
24.45L cm λ=),相对于伪距测量而言,载波相位测量具有很高的距离
测量精度(毫米级),并且具有很高的相对定位精度,因而GPS 测姿通常采用载波相位测量技术。
载波相位观测量是测定GPS 接收机所接收的卫星载波信号与接收机振荡器产生的参考载波信号之间的相位差。
载波相位观测量理论上是GPS 信号在接收时刻的瞬时载波相位值。
但实际上是无法直接测量出任何信号的瞬时载波相位值,测量接收到的是具有多普勒频移的载波信号与接收机产生的参考载波信号之间的相位差。
GPS 信号被接收机接收后,首先进行伪随机码的延时锁定,即实现对卫星信号的跟踪。
一旦跟踪成功,接收机的本地伪随机码就与卫星的伪随机码严格对齐,给出伪距观测量。
之后利用锁相环实现相位的锁定,锁相后接收机本地信号相位与GPS 载波信号相位相同,此时接收机本地信
号相位与初始相位的差即为载波相位观测量。
2.2 载波相位测量定位
图2-1 载波相位测量示意图
Figure 2-1 sketch map of carrier phase measuring
如图2-1所示,某一卫星s 在时刻t 发出相位为s φ的载波信号,经过一段传输距离ρ被接收机u 接收,此时载波相位为u φ,在由卫星s 至接收机u 传输距离上的相位变化为()s u φφ-。
()s u φφ-包括载波相位的整周数和不足一周的小数部分。
测定()s u φφ-之后,则卫星s 到接收机u 的距离ρ可以表示为:
()()0s u N ρλφφλφ=⋅-=⋅-∆
其中:λ为GPS 载波信号的波长;0N 为载波相位的整周数;φ∆为载波相位中不足一周的小数部分。
实际测量中,卫星s 发出的载波相位s φ是无法测量的,因此接收机振荡器便产生一个与卫星载波信号完全相同的参考信号,该参考信号相位等于载波信号的相位。
GPS 接收机得到的载波相位实际上就是接收机接收到的载波信号与本振参考信号的相位差(如图2-2所示)。
这一段改一下?
图2-2 载波相位测量原理示意图
Figure 2-1 sketch map of the principle of carrier phase measuring
在初始观测时刻0t ,测量的相位差()0s
u t Φ为:
()()()()()()000000s
s s s s u u u u u u t t t N t t N t φφφΦ=-+=∆+
式中,()0u t φ为在0t 时刻接收机u 的本振参考信号的载波相位值;()0s u t φ为接收机u 在0t 时刻所接收到的卫星s 的载波信号相位值;()0s u N t 为初始观测时刻0t 的载波整周数,它是一个待定的未知数,成为初始整周模糊度,以2π为单位。
这一段改一下?
初始测量之后,接收机对卫星信号的整周相位变化可以连续进行测量,如图2-3所示。
在0t 以后的1t ,2t ,各个时刻,可以测得不足一周的小数部分,也可以测定的0t 至任一时刻t 时刻的整周数
()0s u N t t -。
图2-3 信号的相位测量
Figure 2-3 phase measurement of the signal
则接收机u 在t 时刻观测卫星s ,其相位观测量为:
()()()()()00s s s s u u u u u t t t N t t N t φφΦ=-+-+
在GPS 时间系统j T 时刻,接收机接收到卫星于某一时刻i T 发出的相位事件,该信号的传播延迟时间j i T T τ∆=-。
也就是说,接收机在j T 时刻所接收到的相位,是卫星在i T 时刻的相位(或接收机参考信号在
i T 时刻的相位),即:
()()()s s u j i u i T T T φφφ==
考虑接收机时钟和卫星时钟相对GPS 系统时之间的钟差,有:
i i i t T t δ=+ j j j t T t δ=+
式中,i t 和j t 分别为卫星时钟和接收机时钟的钟面时刻,
根据上面两个式(),可以得到j t 时刻载波相位观测量:
()()()()s
s s
u u j u j u s
s
u j j i i u
t t N T t T t N
φφφδφδΦ=-+=+-++
式中,()()00s s s u u u N N t t N t =-+为观测时刻整周数。
对于卫星和接收机的时钟,其振荡频率稳定良好,所以信号的相位变化与时间的关系可以表示为:
()()t t t f t φφ+∆=+⋅∆
式中,f 表示频率,φ以周2π为单位。
根据上两式(),式()可以改写为:
s
s u j i u f f t f t N τδδΦ=⋅∆+-+
考虑传播延迟时间τ∆中包含有电离层和对流层的影响ion δρ和
tro δρ,则:
()1
ion tro c
τρδρδρ∆=
-- 式中,c 为电磁波传播速度,ρ为接收机到卫星之间的几何距离,带入式()可以得到接收机u 对卫星s 的载波相位测量方程:
s s u j i ion tro u f f f
f t f t N c c c
ρδδδρδρΦ=
+---+。