小区域控制测量的原理及方法
- 格式:doc
- 大小:535.00 KB
- 文档页数:36
控制测量的作用是限制测量误差的传播和积累,保证必要的测量精度,使分区的测图能拼接成整体,整体设计的工程建筑物能分区施工放样。
控制测量贯穿在工程建设的各阶段:在工程勘测的测图阶段,需要进行测图控制测量;在工程施工阶段,要进行施工控制测量;在工程竣工后的营运阶段,为建筑物变形观测而需要进行的专用控制测量。
控制测量分为平面控制测量和高程控制测量,本单元先介绍平面控制测量。
1、平面控制测量(1)概述测定控制点平面位置的工作,称为平面控制测量。
平面控制网常规的布设方法有三角网、三边网和导线网。
三角网是测定三角形的所有内角以及少量边,通过计算确定控制点的平面位置。
三边网则是测定三角形的所有边长,各内角是通过计算求得。
导线网是把控制点连成折线多边形,测定各边长和相邻边夹角,计算它们的相对平面位置。
1)国家平面控制测量网在全国范围内布设的平面控制网,称为国家平面控制网。
国家平面控制网采用逐级控制、分级布设的原则。
国家平面控制网分为:一、二、三、四等三角测量和一、二等精密导线测量及A、B、C、D、E级GPS控制测量网,它是全国各种比例尺测图的基本控制网。
它是用精密测量仪器依照施测精度建立的,它的低级点受高级点逐级控制。
国家平面控制网主要由三角测量法布设,在西部困难地区采用导线测量法。
如图7-1-1所示,一等三角锁沿经线和纬线布设成纵横交叉的三角锁系,锁长200~250公里,构成许多锁环。
一等三角锁内由近于等边的三角形组成,边长为20~30公里。
二等三角测量有两种布网形式,一种是由纵横交叉的两条二等基本锁将一等锁环划分成4个大致相等的部分,这4个空白部分用二等补充网填充,称纵横锁系布网方案。
另一种是在一等锁环内布设全面二等三角网,称全面布网方案。
二等基本锁的边长为20~25公里,二等网的平均边长为13公里。
一等锁的两端和二等网的中间,都要测定起算边长、天文经纬度和方位角。
所以国家一、二等网合称为天文大地网。
我国天文大地网于1951年开始布设,1961年基本完成,1975年修补测工作全部结束,全网约有5万个大地点。
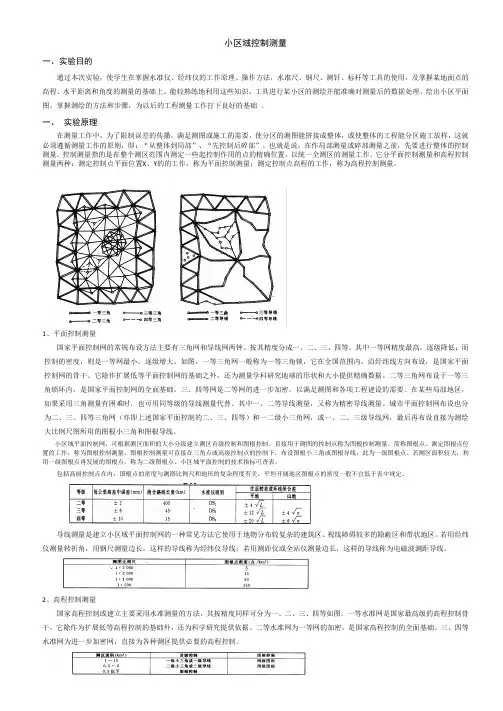
小区域控制测量一、实验目的通过本次实验,使学生在掌握水准仪、经纬仪的工作原理、操作方法,水准尺、钢尺、测钎、标杆等工具的使用,及掌握某地面点的高程、水平距离和角度的测量的基础上。
能较熟练地利用这些知识、工具进行某小区的测绘并能准确对测量后的数据处理、绘出小区平面图,掌握测绘的方法和步骤,为以后的工程测量工作打下良好的基础。
一、实验原理在测量工作中,为了限制误差的传播,满足测图或施工的需要,使分区的测图能拼接成整体,或使整体的工程能分区施工放样,这就必须遵循测量工作的原则,即:“从整体到局部”、“先控制后碎部”。
也就是说,在作局部测量或碎部测量之前,先要进行整体的控制测量。
控制测量指的是在整个测区范围内测定一些起控制作用的点的精确位置,以统一全测区的测量工作。
它分平面控制测量和高程控制测量两种:测定控制点平面位置X、Y的的工作,称为平面控制测量;测定控制点高程的工作,称为高程控制测量。
1、平面控制测量国家平面控制网的常规布设方法主要有三角网和导线网两钟。
按其精度分成一、二、三、四等。
其中一等网精度最高,逐级降低;而控制的密度,则是一等网最小,逐级增大。
如图,一等三角网一般称为一等三角锁,它在全国范围内,沿经纬线方向布设,是国家平面控制网的骨干。
它除作扩展低等平面控制网的基础之外,还为测量学科研究地球的形状和大小提供精确数据。
二等三角网布设于一等三角锁环内,是国家平面控制网的全面基础。
三、四等网是二等网的进一步加密,以满足测图和各项工程建设的需要。
在某些局部地区,如果采用三角测量有困难时,也可用同等级的导线测量代替。
其中一、二等导线测量,又称为精密导线测量。
城市平面控制网布设也分为二、三、四等三角网(亦即上述国家平面控制的二、三、四等)和一二级小三角网,或一、二、三级导线网,最后再布设直接为测绘大比例尺图所用的图根小三角和图根导线。
小区域平面控制网,可根据测区面积的大小分级建立测区首级控制和图根控制。

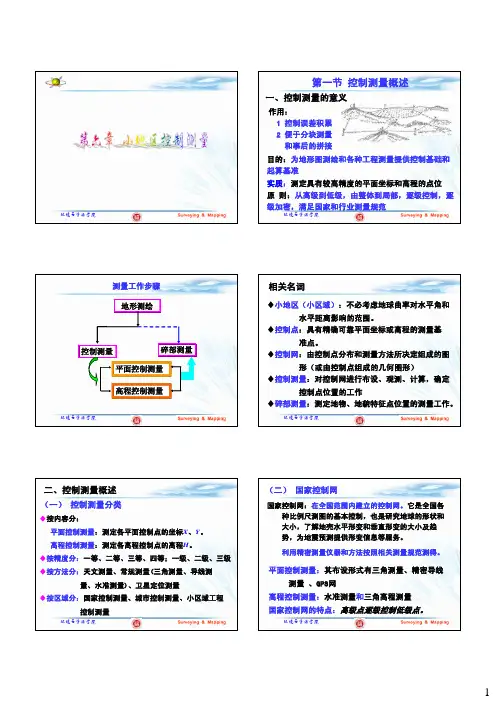
环境与资源学院环境与资源学院第一节控制测量概述一、控制测量的意义作用:1 控制误差积累2 便于分块测量和事后的拼接目的:为地形图测绘和各种工程测量提供控制基础和起算基准实质:测定具有较高精度的平面坐标和高程的点位原则:从高级到低级,由整体到局部,逐级控制,逐级加密,满足国家和行业测量规范环境与资源学院地形测绘控制测量碎部测量平面控制测量高程控制测量测量工作步骤环境与资源学院相关名词小地区(小区域):不必考虑地球曲率对水平角和水平距离影响的范围。
控制点:具有精确可靠平面坐标或高程的测量基准点。
控制网:由控制点分布和测量方法所决定组成的图形(或由控制点组成的几何图形)控制测量:对控制网进行布设、观测、计算,确定控制点位置的工作碎部测量:测定地物、地貌特征点位置的测量工作。
环境与资源学院二、控制测量概述(一)控制测量分类按内容分:平面控制测量:测定各平面控制点的坐标X 、Y 。
高程控制测量:测定各高程控制点的高程H 。
按精度分:一等、二等、三等、四等;一级、二级、三级 按方法分:天文测量、常规测量(三角测量、导线测量、水准测量)、卫星定位测量按区域分:国家控制测量、城市控制测量、小区域工程控制测量环境与资源学院(二)国家控制网平面控制测量:其布设形式有三角测量、精密导线测量、GPS网高程控制测量:水准测量和三角高程测量国家控制网的特点:高级点逐级控制低级点。
国家控制网:在全国范围内建立的控制网。
它是全国各种比例尺测图的基本控制,也是研究地球的形状和大小,了解地壳水平形变和垂直形变的大小及趋势,为地震预测提供形变信息等服务。
利用精密测量仪器和方法按照相关测量规范测得。
环境与资源学院(1)三角测量各三角形向某一个方向延伸推进而连成锁状,称三角锁三角形向各方向扩展而连成网状,称为三角网按精度不同全国性平面控制网分为一、二、三、四等。
观测所有三角形的内角,并至少测量其中一条边长,作为起算边。
这种三角形的顶点称为三角点,并进行这种控制测量称为三角测量。
小区域空间定位系统测量放样工法小区域空间定位系统测量放样工法是一种高精度测量放样工法,适用于建筑施工等小区域空间需求精确定位的场景。
本文将介绍小区域空间定位系统的原理、使用方法以及优势。
一、小区域空间定位系统的原理小区域空间定位系统主要由定位仪、基站和电脑控制软件组成。
定位仪是用于获取实时测量数据的仪器,基站是作为信号发射器的中心控制设备,电脑控制软件则用于处理和分析测量数据。
定位仪通过接收基站发出的无线信号定位自身的位置,并将定位信息传输到电脑控制软件进行处理。
基站通过与定位仪之间的通讯实现与定位仪的实时数据交换,并根据接收到的定位数据计算出目标点的坐标。
二、小区域空间定位系统的使用方法1. 设定基站:在使用小区域空间定位系统之前,首先需要设定基站的位置。
基站应尽可能处于目标区域的中心位置,以确保测量范围的完整性和准确性。
2. 安装定位仪:将定位仪放置在需要进行测量放样的目标点上,并将其与基站进行无线连接。
定位仪可以通过受限区域的布放和墙面的粘贴等方式进行安装。
3. 启动系统:启动基站和定位仪,并确认二者之间的连接是否正常。
在启动过程中,系统将进行自动校准和对齐。
4. 数据采集和放样:通过定位仪获取目标点的实时位置数据,并将数据传输到电脑控制软件进行处理。
根据测量结果,进行相应的放样工作。
三、小区域空间定位系统的优势1. 高精度:小区域空间定位系统具有极高的测量精度,可以实现亚毫米级的定位精度,满足各种建筑施工的精确要求。
2. 实时性:定位仪可以实时获取目标点的位置数据,并将其传输到电脑控制软件进行处理,减少了数据传输和处理的时间,提高了工作效率。
3. 灵活性:小区域空间定位系统适用于各种小区域空间定位需求,具有广泛的应用范围,如建筑施工、室内设计等。
4. 可视化:小区域空间定位系统可以通过电脑控制软件进行数据处理和分析,将测量结果直观显示在电脑界面上,便于用户理解和操作。
综上所述,小区域空间定位系统是一种高精度的测量放样工法,通过定位仪、基站和电脑控制软件的组合使用,可以实现小区域空间的精确定位,并具有高精度、实时性、灵活性和可视化等优势。
Chap07 小区域控制测量引言小区域控制测量是指在无线通信系统中,对小区进行精确的控制和测量。
小区域控制测量在无线通信系统中起着至关重要的作用,它可以提高系统的覆盖范围和容量,同时减少干扰。
本文将介绍小区域控制测量的基本原理、常用测量方法和实施步骤,以及小区域控制测量的应用。
小区域控制测量的原理小区域控制测量的原理是基于无线通信系统中的测量技术和控制算法。
无线通信系统中的测量技术包括接收信号强度指示(Received Signal Strength Indication, RSSI)、截幅测量(Clipping Measurement)和链路质量测量(Link Quality Measurement)等。
控制算法主要包括功率控制算法、干扰抑制算法和拓扑优化算法等。
在小区域控制测量中,首先通过RSSI测量技术获取到接收信号的强度,然后将测量结果传输给控制算法进行处理。
控制算法根据接收信号的强度和预设的阈值进行判断,从而决定是否进行功率控制、干扰抑制或拓扑优化等操作。
通过不断的测量和控制,可以实现小区的精确控制和优化。
常用的小区域控制测量方法小区域控制测量方法主要包括RSSI测量、干扰测量和链路质量测量等。
RSSI测量RSSI测量是指通过接收信号强度指示技术对无线信号强度进行测量。
常用的RSSI测量方法包括信号强度指示器(Signal Strength Indicator, SSI)和能量检测器(Energy Detector)等。
这些方法可以通过测量接收信号的功率或能量来判断信号的强度。
干扰测量是指通过测量在小区内的干扰信号来判断当前的干扰程度。
常用的干扰测量方法包括干扰损耗测量(Interference Loss Measurement, ILM)和噪声测量等。
这些方法可以通过测量接收信号的干扰程度来判断当前的干扰情况。
链路质量测量链路质量测量是指通过测量无线链路的质量指标来判断链路的性能。
常用的链路质量测量方法包括误码率测量(Bit Error Rate, BER)和链路容量测量等。
小区域控制测量的原理及方法控制测量概述在绪论中已经指出,测量工作必须遵循“从整体到局部,先控制后碎部”的原则,先建立控制网,然后根据控制网进行碎部测量和测设。
控制网分为平面控制网和高程控制网两种。
测定控制点平面位置的工作,称为平面控制测量。
测定控制点高程的工作,称为高程控制测量。
在全国范围内建立的控制网,称为国家控制网。
它是全国各种比例尺测图的基本控制,并为确定地球的形状和大小提供研究资料。
国家控制网是用精密测量仪器和方法依照施测精度按一、二、三、四等四个等级建立的,它的低级点受高级点逐级控制。
一等三角锁是国家平面控制网的骨干。
二等三角网布设于一等三角锁环内,是国家平面控制网的全面基础。
三、四等三角网为二等三角网的进一步加密。
建立国家平面控制网,主要采用三角测量的方法。
国家一等水准网是国家高程控制网的骨干。
二等水准网布设于一等水准环内,是国家高程控制网的全面基础。
三、四等水准网为国家高程控制网的进一步加密,建立国家高程控制网,采用精密水准测量的方法。
在城市或厂矿等地区,一般应在上述国家控制点的基础上,根据测区的大小、城市规划和施工测量的要求,布设不同等级的城市平面控制网,以供地形测图和施工放样使用。
直接供地形测图使用的控制点,称为图根控制点,简称图根点。
测定图根点位置的工作,称为图根控制测量。
图根点的密度(包括高级点),取决于测图比例尺和地物、地貌的复杂程度。
至于布设哪一级控制作为首级控制,应根据城市或厂矿的规模。
中小城市一般以四等网作为首级控制网。
面积在15km以内的小城镇,可用小三角网或一级导线网作为首级控制。
面积在0.5km以下的测区,图根控制网可作为首级控制。
厂区可布设建筑方格网。
城市或厂矿地区的高程控制分为二、三、四等水准测量和图根水准测量等几个等级,它是城市大比例尺测图及工程测量的高程控制。
同样,应根据城市或厂矿的规模确定城市首级水准网的等级,然后再根据等级水准点测定图根点的高程。
水准点间的距离,一般地区为2—3km,城市建筑区为1—2km,工业区小于1km。
一个测区至少设立三个水准点。
本文主要讨论小地区(10km’以下)控制网建立的有关问题。
下面将分别介绍用导线测量建立小地区平面控制网的方法,用三、四等水淮测量和三角高程测量建立小地区高程控制网的方法。
第二节导线测量导线测量是平面控制测量的一种方法。
所谓导线就是由测区内选定的控制点组成的连续折线,见图6-1所示。
折线的转折点A、B、C、E 、F 称为导线点;转折边D AB 、D BC 、D CE 、D EF 称为导线边;水平角B β,C β,E β称为转折角,其中B β、E β在导线前进方向的左侧,叫做左角,C β在导线前进方向的右侧,叫做右角;AB α称为起始边D AB 的坐标方位角。
导线测量主要是测定导线边长及其转折角,然后根据起始点的已知坐标和起始边的坐标方位角,计算各导线点的坐标。
图6-1 导线示意图一、导线的形式根据测区的情况和要求,导线可以布设成以下几种常用形式: 1.闭合导线。
如图6-2a)所示,由某一高级控制点出发最后又回到该点,组成一个闭合多边形。
它适用于面积较宽阔的独立地区作测图控制。
2.附合导线。
如图6-2b)所示,自某一高级控制点出发最后附合到另一高级控制点上的导线,它适用于带状地区的测图控制,此外也广泛用于公路、铁路、管道、河道等工程的勘测与施工控制点的建立。
3.支导线。
如图6-2c)所示,从一控制点出发,即不闭合也不附合于另一控制点上的单一导线,这种导线没有已知点进行校核,错误不易发现,所以导线的点数不得超过2~3个。
图6-2 导线的布置形式示意图二、导线的等级除国家精密导线外,在公路工程测量中,限据测区范围和精度要求,导线测量可分为三等、四等、一级、二级和三级导线五个等级。
各级导线测量的技术要求如表6-1所列。
导线测量的技术要求表6-1导线测量的外业工作导线测量的工作分外业和内业。
外业工作一般包括选点、测角和量边;内业工作是根据外业的观测成果经过计算,最后求得各导线点的平面直角坐标。
本节要介绍的是外业中的几项工作。
一、选点导线点位置的选择,除了满足导线的等级、用途及工程的特殊要求外,选点前应进行实地踏勘,根据地形情况和已有控制点的分布等确定布点方案,并在实地选定位置。
在实地选点时应注意下列几点: (1)导线点应选在地势较高、视野开阔的地点,便于施测周围地形;(2)相邻两导线点间要互相通视,便于测量水平角:(3)导线应沿着平坦、土质坚实的地面设置,以便于丈量距离;(4)导线边长要选得大致相等,相邻边长不应悬殊过大;(5)导线点位置须能安置仪器,便于保存。
(6)导线点应尽量靠近路线位置。
导线点位置选好后要在地面上标定下来,一般方法是打一木桩并在桩顶中心钉一小铁钉。
对于需要长期保存的导线点,则应埋入石桩或混凝土桩,桩顶刻凿十字或浇入锯有十字的钢筋作标志。
为了便于日后寻找使用,最好将重要的导线点及其附近的地物绘成草图,注明尺寸,如图6-3所示。
图6-3 导线点之标记图二、测角导线的水平角即转折角,是用经纬仪按测回法进行观测的。
在导线点上可以测量导线前进方向的左角或右角。
一般在附合导线中,测量导线的左角,在闭合导线中均测内角。
当导线与高级点连接时,需测出各连接角,如图6-2b)中的ϕ1,ϕ2角。
如果是在没有高级点的独立地区布设导线时,测出起始边的方位角以确定导线的方向,或假定起始边方位角。
三、量距导线采用普通钢尺丈量导线边长或用全站仪进行导线边长测量。
请参阅第四章的有关内容。
导线测量的内业计算导线测量的最终目的是要获得各导线点的平面直角坐标,因此外业工作结束后就要进行内业计算,以求得导线点的坐标。
一、坐标计算的基本公式1.根据已知点的坐标及已知边长和坐标方位角计算未知点的坐标,即坐标的正算。
如图6-5所示,设A为已知点,B为未知点,当A点的坐标XA 、YA 和边长DAB 、坐标方位角αAB 均为已知时,则可求得B点的坐标XB 、YB 。
由图可知:⎭⎬⎫+=+=AB A B AB A B Y Y Y X X X ∆∆ (6-1)其中,坐标增量的计算公式为:⎭⎬⎫⋅=⋅=AB AB AB AB AB AB sin cos α∆α∆D Y D X (6-2)式中∆X AB , ∆Y AB 的正负号应根据cos AB α、sin AB α的正负号决定,所以式(6-1)又可写成:⎭⎬⎫⋅+=⋅+=AB AB A B AB AB A B sin cos ααD Y Y D X X (6-3)图6-5 导线坐标计算示意图2.由两个已知点的坐标反算其坐标方位角和边长,即坐标的反算如图6-5所示,若设A 、B 为两已知点,其坐标分别为X A 、Y A 和X B 、Y B 则可得:ABABAB tan X Y ∆∆α=(6-4) D AB =ABABAB AB cos sin α∆α∆X Y =(6-5) 或D AB =2AB 2AB )()(Y X ∆∆+(6-6)上式中∆X AB =X B =X A , ∆Y AB =Y B -Y A 。
由式(6-4)可求得AB α。
AB α求得后,又可由(6-5)式算出两个D AB ,并作相互校核。
如果仅尾数略有差异,就取中数作为最后的结果。
需要指出的是:按(6-4))式计算出来的坐标方位角是有正负号的,因此,还应按坐标增量∆X 和∆Y 的正负号最后确定AB 边的坐标方位角。
即:若按(6-4)式计算的坐标方位角为:XY∆∆α1tan -=' (6-7)则AB边的坐标方位角α参见图6-11应为:AB在第Ⅰ象限,即当∆X>0,∆Y>0时,αα'=AB在第Ⅱ象限,即当∆X<0,∆Y>0时,αα'︒=180-AB在第Ⅲ象限,即当∆X<0,∆Y<0时,αα'=180︒+AB(6-8)在第Ⅳ象限,即当∆X>0,∆Y<0时,αα'=360-︒AB也就是当∆X>0时,应给α'加360°;当∆X<0时,应给α'加180°才是所求AB边的坐标方位角。
二、坐标方位角的推算为了计算导线点的坐标,首先应推算出导线各边的坐标方位角(以下简称方位角)。
如果导线和国家控制点或测区的高级点进行了连接,则导线各边的方位角是由已知边的方位角来推算;如果测区附近没有高级控制点可以连接,称为独立测区,则须测量起始边的方位角,再以此观测方位角来推算导线各边的方位角。
如图6-6所示,设A 、B 、C 为导线点,AB 边的方位角AB α为已知,导线点B 的左角为β左现在来推算BC 边的方位角BC α。
由正反方位角的关系,可知:BC α=AB α-180°则从图中可以看出:BC α=AB α+β左=AB α-180°+β左6-9)根据方位角不大于360°的定义,当用上式算出的方位角大于360°,则减去360°即可。
当用右角推算方位角时,如图6-7所示:BA α=AB α+180°则从图中可以看出 BC α=αBA +180°-β右(6-10)用(6-10)式计算BC α时,如果AB α+180°后仍小于β右时,则应加360°后再减β右。
根据上述推导,得到导线边坐标方位角的一般推算公式为:+β左后前αα=±180° (6-11)-β右 式中:后前、αα——是导线点的前边方位角和后边方位角。
如图6-8所示,以导线的前进方向为参考,导线点B 的后边是AB 边,其方位角为前α;前边是BC 边,其方位角为后α。
图6-7 坐标方位角推算示意图图6-8 坐标方位角推算标准图180°前的正负号取用,是当α后<180°时,用“+”号;当α后>180°时,用“-”号。
导线的转折角是左角(β左)就加上;右角(β右)就减去。
三、闭合导线的坐标计算1.角度闭合差的计算与调整闭合导线从几何上看,是一多边形,见图6-9所示。
其内角和在理论上应满足下列关系:∑β理=180°²(n -2)但由于测角时不可避免地有误差存在,使实测得内角之和不等于理论值,这样就产生了角度闭合差,以f β来表示,则: f β=∑β测-∑β理或 f β=∑β测-(n -2)²180°(6-12)式中:n ——闭合导线的转折角数; ∑β测——观测角的总和。
算出角度闭合差之后,如果f β值不超过允许误差的限度,(一般为±40n ,n ——角度个数),说明角度观测符合要求,即可进行角度闭合差调整,使调整后的角值满足理论上的要求。
由于导线的各内角是采用相同的仪器和方法,在相同的条件下观测的,所以对于每—个角度来讲,可以认为它们产生的误差大致相同,因此在调整角度闭合差时,可将闭合差按相反的符号平均分配于每个观测内角中。