小区域控制测量方法
- 格式:pptx
- 大小:1.17 MB
- 文档页数:41
小区域控制测量
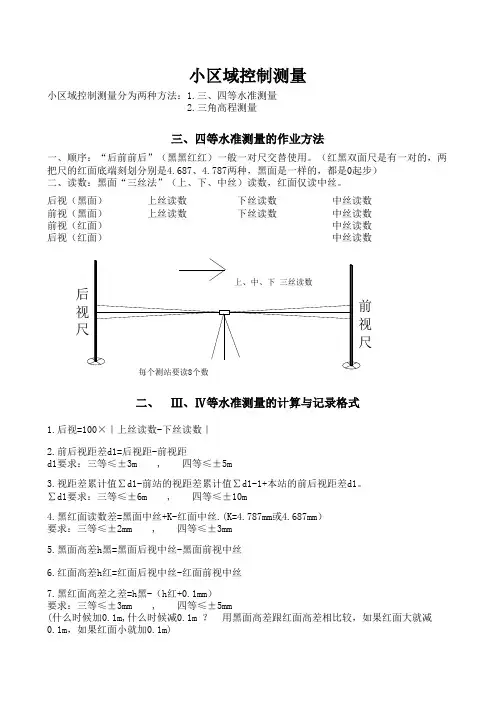
小区域控制测量分为两种方法:1.三、四等水准测量
2.三角高程测量
三、四等水准测量的作业方法
一、顺序:“后前前后”(黑黑红红)一般一对尺交替使用。
(红黑双面尺是有一对的,两把尺的红面底端刻划分别是4.687、4.787两种,黑面是一样的,都是0起步)
二、读数:黑面“三丝法”(上、下、中丝)读数,红面仅读中丝。
后视(黑面) 上丝读数 下丝读数 中丝读数
前视(黑面) 上丝读数 下丝读数 中丝读数
前视(红面) 中丝读数
后视(红面) 中丝读数
二、 Ⅲ、Ⅳ等水准测量的计算与记录格式
1.后视=100×|上丝读数-下丝读数|
2.前后视距差d1=后视距-前视距
d1要求:三等≤±3m , 四等≤±5m
3.视距差累计值∑d1-前站的视距差累计值∑d1-1+本站的前后视距差d1。
∑d1要求:三等≤±6m , 四等≤±10m
4.黑红面读数差=黑面中丝+K-红面中丝.(K=4.787mm或4.687mm)
要求:三等≤±2mm , 四等≤±3mm
5.黑面高差h黑=黑面后视中丝-黑面前视中丝
6.红面高差h红=红面后视中丝-红面前视中丝
7.黑红面高差之差=h黑-(h红+0.1mm)
要求:三等≤±3mm , 四等≤±5mm
(什么时候加0.1m,什么时候减0.1m ? 用黑面高差跟红面高差相比较,如果红面大就减0.1m,如果红面小就加0.1m)
8.高差中数=[h黑+(h红+0.1m)]/2
9.水准路线总长L=∑后视距+∑前视距。

环境与资源学院环境与资源学院第一节控制测量概述一、控制测量的意义作用:1 控制误差积累2 便于分块测量和事后的拼接目的:为地形图测绘和各种工程测量提供控制基础和起算基准实质:测定具有较高精度的平面坐标和高程的点位原则:从高级到低级,由整体到局部,逐级控制,逐级加密,满足国家和行业测量规范环境与资源学院地形测绘控制测量碎部测量平面控制测量高程控制测量测量工作步骤环境与资源学院相关名词小地区(小区域):不必考虑地球曲率对水平角和水平距离影响的范围。
控制点:具有精确可靠平面坐标或高程的测量基准点。
控制网:由控制点分布和测量方法所决定组成的图形(或由控制点组成的几何图形)控制测量:对控制网进行布设、观测、计算,确定控制点位置的工作碎部测量:测定地物、地貌特征点位置的测量工作。
环境与资源学院二、控制测量概述(一)控制测量分类按内容分:平面控制测量:测定各平面控制点的坐标X 、Y 。
高程控制测量:测定各高程控制点的高程H 。
按精度分:一等、二等、三等、四等;一级、二级、三级 按方法分:天文测量、常规测量(三角测量、导线测量、水准测量)、卫星定位测量按区域分:国家控制测量、城市控制测量、小区域工程控制测量环境与资源学院(二)国家控制网平面控制测量:其布设形式有三角测量、精密导线测量、GPS网高程控制测量:水准测量和三角高程测量国家控制网的特点:高级点逐级控制低级点。
国家控制网:在全国范围内建立的控制网。
它是全国各种比例尺测图的基本控制,也是研究地球的形状和大小,了解地壳水平形变和垂直形变的大小及趋势,为地震预测提供形变信息等服务。
利用精密测量仪器和方法按照相关测量规范测得。
环境与资源学院(1)三角测量各三角形向某一个方向延伸推进而连成锁状,称三角锁三角形向各方向扩展而连成网状,称为三角网按精度不同全国性平面控制网分为一、二、三、四等。
观测所有三角形的内角,并至少测量其中一条边长,作为起算边。
这种三角形的顶点称为三角点,并进行这种控制测量称为三角测量。
小区域空间定位系统测量放样工法小区域空间定位系统测量放样工法是一种高精度测量放样工法,适用于建筑施工等小区域空间需求精确定位的场景。
本文将介绍小区域空间定位系统的原理、使用方法以及优势。
一、小区域空间定位系统的原理小区域空间定位系统主要由定位仪、基站和电脑控制软件组成。
定位仪是用于获取实时测量数据的仪器,基站是作为信号发射器的中心控制设备,电脑控制软件则用于处理和分析测量数据。
定位仪通过接收基站发出的无线信号定位自身的位置,并将定位信息传输到电脑控制软件进行处理。
基站通过与定位仪之间的通讯实现与定位仪的实时数据交换,并根据接收到的定位数据计算出目标点的坐标。
二、小区域空间定位系统的使用方法1. 设定基站:在使用小区域空间定位系统之前,首先需要设定基站的位置。
基站应尽可能处于目标区域的中心位置,以确保测量范围的完整性和准确性。
2. 安装定位仪:将定位仪放置在需要进行测量放样的目标点上,并将其与基站进行无线连接。
定位仪可以通过受限区域的布放和墙面的粘贴等方式进行安装。
3. 启动系统:启动基站和定位仪,并确认二者之间的连接是否正常。
在启动过程中,系统将进行自动校准和对齐。
4. 数据采集和放样:通过定位仪获取目标点的实时位置数据,并将数据传输到电脑控制软件进行处理。
根据测量结果,进行相应的放样工作。
三、小区域空间定位系统的优势1. 高精度:小区域空间定位系统具有极高的测量精度,可以实现亚毫米级的定位精度,满足各种建筑施工的精确要求。
2. 实时性:定位仪可以实时获取目标点的位置数据,并将其传输到电脑控制软件进行处理,减少了数据传输和处理的时间,提高了工作效率。
3. 灵活性:小区域空间定位系统适用于各种小区域空间定位需求,具有广泛的应用范围,如建筑施工、室内设计等。
4. 可视化:小区域空间定位系统可以通过电脑控制软件进行数据处理和分析,将测量结果直观显示在电脑界面上,便于用户理解和操作。
综上所述,小区域空间定位系统是一种高精度的测量放样工法,通过定位仪、基站和电脑控制软件的组合使用,可以实现小区域空间的精确定位,并具有高精度、实时性、灵活性和可视化等优势。