阵列天线方向图的初步研究
- 格式:doc
- 大小:247.50 KB
- 文档页数:6
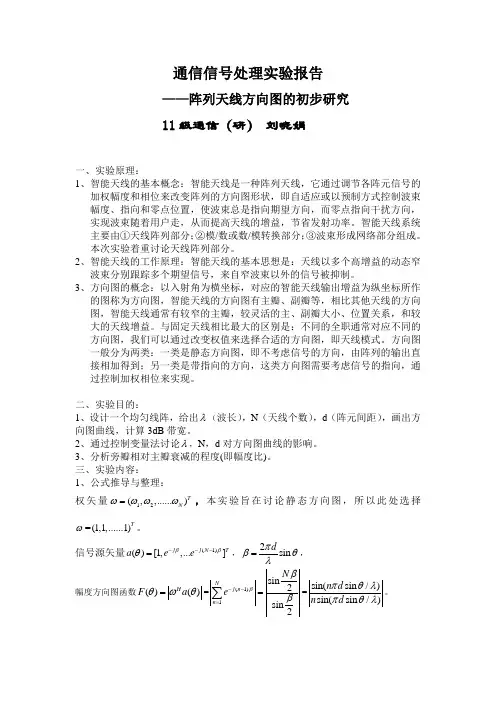
通信信号处理实验报告——阵列天线方向图的初步研究 11级通信(研) 刘晓娟一、实验原理:1、智能天线的基本概念:智能天线是一种阵列天线,它通过调节各阵元信号的加权幅度和相位来改变阵列的方向图形状,即自适应或以预制方式控制波束幅度、指向和零点位置,使波束总是指向期望方向,而零点指向干扰方向,实现波束随着用户走,从而提高天线的增益,节省发射功率。
智能天线系统主要由①天线阵列部分;②模/数或数/模转换部分;③波束形成网络部分组成。
本次实验着重讨论天线阵列部分。
2、智能天线的工作原理:智能天线的基本思想是:天线以多个高增益的动态窄波束分别跟踪多个期望信号,来自窄波束以外的信号被抑制。
3、方向图的概念:以入射角为横坐标,对应的智能天线输出增益为纵坐标所作的图称为方向图,智能天线的方向图有主瓣、副瓣等,相比其他天线的方向图,智能天线通常有较窄的主瓣,较灵活的主、副瓣大小、位置关系,和较大的天线增益。
与固定天线相比最大的区别是:不同的全职通常对应不同的方向图,我们可以通过改变权值来选择合适的方向图,即天线模式。
方向图一般分为两类:一类是静态方向图,即不考虑信号的方向,由阵列的输出直接相加得到;另一类是带指向的方向,这类方向图需要考虑信号的指向,通过控制加权相位来实现。
二、实验目的:1、设计一个均匀线阵,给出λ(波长),N (天线个数),d (阵元间距),画出方向图曲线,计算3dB 带宽。
2、通过控制变量法讨论λ,N ,d 对方向图曲线的影响。
3、分析旁瓣相对主瓣衰减的程度(即幅度比)。
三、实验内容:1、公式推导与整理:权矢量12(,,......)T N ωωωω=,本实验旨在讨论静态方向图,所以此处选择ω=(1,1,......1)T 。
信号源矢量(1)()[1,,...]j j N T a e e ββθ---=,2sin dπβθλ=,幅度方向图函数()()HF a θωθ==(1)1sin2sin 2Nj n n N eβββ--==∑=sin(sin /)sin(sin /)n d n d πθλπθλ。
阵列方向图综合方法研究的开题报告一、研究背景及意义现代通信技术迅速发展,对于射频信号的传输和接收需求逐渐增加。
阵列天线作为一种现代通信的重要技术之一,已经广泛应用于无线通信、雷达探测、航空航天等领域。
阵列天线的方向图是其在信号传输及接收过程中的关键性能指标之一,因此研究阵列方向图综合方法对于提高阵列天线的通信性能有着重要的意义。
二、研究内容及目标本文将研究阵列方向图综合方法,主要包括以下内容:1. 阵列天线的基本原理和方向图特性:研究阵列天线的工作原理和方向图特性,为后续阵列方向图综合方法的研究提供理论基础。
2. 阵列方向图综合方法的分类和研究现状:对阵列方向图综合方法进行分类和综述其研究现状,为本文研究提供基础。
3. 针对不同应用场景的阵列方向图综合方法研究:针对不同应用场景,如雷达探测、无线通信等,结合具体需求,研究不同的阵列方向图综合方法设计,并探究其性能优势和适用范围。
本文的目标是探究阵列方向图综合方法的设计和性能优化,为阵列天线的通信性能提升提供有效的理论和方法支持。
三、研究方法和技术路线本文主要研究方法包括理论推演和仿真模拟。
从阵列天线的工作原理和方向图特性入手,通过理论推导和仿真模拟,探索阵列方向图综合方法的设计和优化,为阵列天线的通信性能提升提供理论和技术支持。
技术路线如下:文献调研、阵列天线基本原理研究、阵列方向图综合方法分类和综述、针对不同应用场景的阵列方向图综合方法研究、仿真模拟实现等。
四、预期结果和意义本文旨在研究阵列方向图综合方法,预期结果和意义如下:1. 对阵列天线的工作原理和方向图特性进行深入研究和探索,为阵列方向图综合方法的研究提供理论基础。
2. 对阵列方向图综合方法进行分类和综述,为不同应用场景下的阵列方向图综合方法的研究提供概念和方法支持。
3. 针对不同应用场景,研究阵列方向图综合方法的设计和优化,并进行仿真模拟实现,探究其性能特点和适用范围。
4. 提高阵列天线的通信性能,促进现代通信技术的发展。
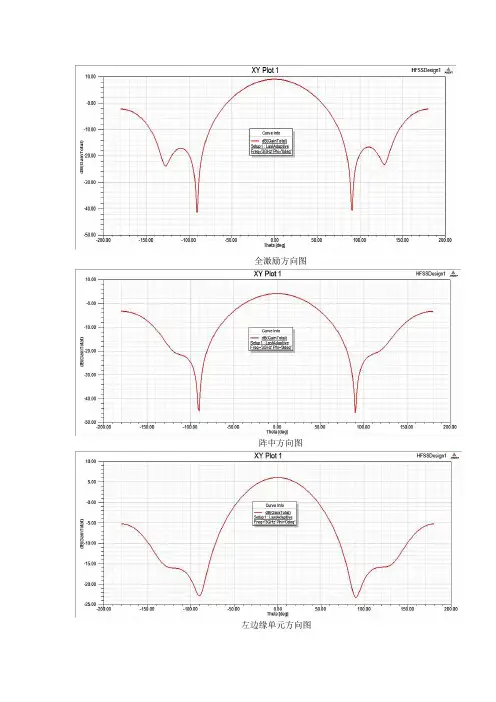
全激励方向图阵中方向图左边缘单元方向图左临边单元方向图右临边单元方向图右边缘单元方向图阵中(5号单元)方向图边缘单元(1号单元)方向图边缘单元(2号单元)方向图边缘单元(3号单元)方向图边缘单元(4号单元)方向图边缘单元(6号单元)方向图边缘单元(7号单元)方向图边缘单元(8号单元)方向图边缘单元(9号单元)方向图全激励方向图阵中方向图Unit 1(1) a flash in the pan昙花一现的人物,一时的成功★The low inflation rate will be no flash in the pan.(2) a matter of 关于...的问题;大约★To be promoted or to fall behind is not a matter of salary but even more a matter of self-respect. ★John cost a matter of 500 yuan for the coat.(3) a number of 一系列,一连串;大部分★When American’s National Research Council sent two engineers to supervise a series of industrial experiments at a large telephone-parts factory called the Hawthorne Plant near Chicago in 1924, it hoped they would learn how shop-floor lighting affected workers’ productivity.★A majority of immigrants spoke English well or very well after ten years of residence.(4)a majority of 种种,各种★A variety of small clubs can provide multiple opportunities for leadership, as well as for practice in successful group dynamics.(5) abide by 恪守,遵守,服从★Californians and New Englanders speak the same language and abide by the same federal laws.(6)above all 首要,尤其★Among the many shaping factors, I would single out the country’s excellent elementary schools; and above all the American genius。
阵列天线方向图的遗传算法综合及零陷研究的开题报告标题阵列天线方向图的遗传算法综合及零陷研究研究背景随着通信技术的发展,对天线方向图(Antenna Pattern)的要求越来越高。
阵列天线是一种常见的天线类型,它具有较窄的主瓣和较弱的旁瓣,方向图的合理设计对于信号的传输和接收至关重要。
而阵列天线的设计需要考虑到多个因素,包括天线的距离、放置方式和天线的特性等。
在阵列天线的设计中,方向图是一个重要的指标。
遗传算法在优化问题中表现出了较好的优越性,可以用于阵列天线方向图的综合设计。
此外,阵列天线方向图还存在零陷(Nulls)问题,在特定的方向上可能会出现方向图深度降低的现象,这也需要考虑到其设计中。
研究目的本研究旨在探究阵列天线方向图的遗传算法综合设计方法,并进一步研究零陷的问题。
具体研究目的如下:1. 探究阵列天线方向图的优化设计方法,基于遗传算法进行综合设计,以达到最佳的信号传输和接收效果;2. 分析阵列天线方向图中存在的零陷问题,提出有效的解决方法,并对其进行优化测试验证,以提高方向图的抗干扰能力和准确性;3. 开发基于遗传算法的阵列天线方向图优化设计软件,方便工程师在设计过程中快速地进行优化计算和分析。
研究内容本研究的主要内容包括以下方面:1. 阵列天线方向图和其优化设计方法的研究。
对天线的基本性质和方向图设计的要求进行分析研究,并探究遗传算法在阵列天线方向图综合设计中的应用;2. 阵列天线方向图中存在的零陷问题的研究。
对零陷产生的原因进行分析,并针对性地提出有效的解决方法,对其进行优化测试验证;3. 开发基于遗传算法的阵列天线方向图优化设计软件。
实现从基本参数设置、算法运行到结果分析等全面优化设计的功能。
研究方法1. 文献综述。
查阅大量文献,了解国内外研究现状和发展动态;2. 理论分析。
对阵列天线方向图的优化设计方法和零陷问题进行理论分析,提出相应的解决方法;3. 实验仿真。
利用仿真软件对提出的算法和方法进行验证和优化,并设计相应的实验方案;4. 软件开发。
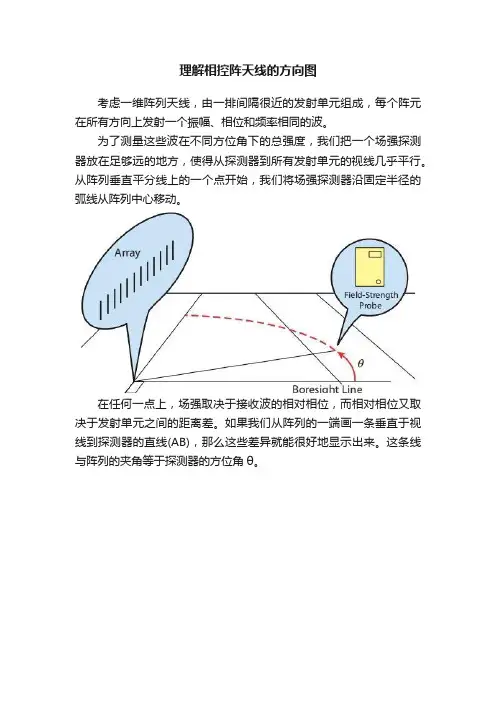
理解相控阵天线的方向图考虑一维阵列天线,由一排间隔很近的发射单元组成,每个阵元在所有方向上发射一个振幅、相位和频率相同的波。
为了测量这些波在不同方位角下的总强度,我们把一个场强探测器放在足够远的地方,使得从探测器到所有发射单元的视线几乎平行。
从阵列垂直平分线上的一个点开始,我们将场强探测器沿固定半径的弧线从阵列中心移动。
在任何一点上,场强取决于接收波的相对相位,而相对相位又取决于发射单元之间的距离差。
如果我们从阵列的一端画一条垂直于视线到探测器的直线(AB),那么这些差异就能很好地显示出来。
这条线与阵列的夹角等于探测器的方位角θ。
现在,如果θ为零,并且探测器远离阵列,则探测器到所有发射器的距离基本上是相同的。
这些波是同相位的,它们的场强叠加成一个很大的值。
但是,如果θ大于零,那么探测器到发射单元的距离就会逐渐增大。
因此,接收波的相位都略有不同,场强之和没有θ为零时那么大。
随着方位角的增大,距离差增大。
最终达到了一个点,如探测器至第一发射器(第1号)的距离与至中心发射器(第7号)距离之差为半波长。
那么,1号接收波与7号接收波相互抵消。
从2号和8号收到的波也是如此。
以此类推,从所有发射器接收到的波强度之和为零。
探测器已经到达了天线辐射强度总和为零的方位角。
如果θ进一步增加,阵列末端发射器的波将不再完全抵消,并且之和会增加。
当探测器到阵列首末两端的距离之差为1.5个波长时,会达到另一个峰值。
3到10发射单元发出的波依然对消,但两头发射器发出的波,1和2以及11和12,相加能够产生一个可观的结果。
探测器的位置位于阵列第一旁瓣的中心。
如果θ进一步增加,发生对消的部分就会增加,并且重复上述过程。
场强与方位角的关系如图所示,可由下列方程表示。
其中E是场强,x与θ成正比。
这被称为sinx/x或sinc函数。
实际上,x=π(L/λ)sinθ。
其中是波长。
所以只有当θ值比较小时,x与θ成正比。
随着θ的增加,逐渐小于θ,导致高阶旁瓣的幅度逐渐减小。
目录一、基本概念 (1)1.1方向图基本概念 (1)1.2主瓣宽度 (2)1.2.1主瓣宽度基本概念及特性 (4)1.3旁瓣抑制 (4)一、基本概念1.1方向图基本概念天线的辐射电磁场在固定距离上随角坐标分布的图形,称为方向图。
用辐射场强表示的称为场强方向图,用功率密度表示的称之功率方向图,用相位表示的称为相位方向图。
天线方向图是空间立体图形,但是通常应用的是两个互相垂直的主平面內的方向图,称为平面方向图。
在线性天线中,由于地面影响较大,都采用垂直面和水平面作为主平面。
在面型天线中,则采用E平面和H平面作为两个主平面。
归一化方向图取最大值为一。
在方向图中,包含所需最大辐射方向的辐射波瓣叫天线主波瓣,也称天线波束。
主瓣之外的波瓣叫副瓣或旁瓣或边瓣,与主瓣相反方向上的旁瓣叫后瓣,见图1:全向天线水平波瓣和垂直波瓣图,其天线外形为圆柱型;图2:定向天线水平波瓣和垂直波瓣图,其天线外形为板状。
图1 全向天线波瓣示意图图2 定向天线波瓣示意图1.2主瓣宽度为了方便对各种天线的方向图特性进行比较,就需要规定一些特性参数。
主要包括:零功率波瓣宽度、半功率点波瓣宽度、旁瓣电平、前后比、方向系数等。
1.零功率波瓣宽度,指主瓣两侧场强值为0的两个方向之间的夹角,用2表示。
许多天线方向图的主瓣是关于最大辐射方向对称的,因此,只要确定零功率主瓣宽度的一半,再取其2倍即可求得零功率主瓣宽度,即2=2。
2. 半功率点波瓣宽度,指方向图主瓣两侧两个半功率点(即场强下降到最大值下降到0.707(或分贝值从最大值下降3dB处对应的两点)之间的夹角,又称为3dB波束宽度或主瓣宽度,记为。
对方向图对称天线,半功率主瓣宽度=2。
一般情况下,天线的E面和H面方向图主瓣宽度不同,分别记为、。
如不特殊说明,通常主瓣宽度是指半功率主瓣。
3. 副瓣电平,天线往往不止一个副瓣,而是有若干个。
仅靠主瓣的副瓣叫第一副瓣,依次为第二,第三、……副瓣,这些副瓣的峰值可能是不同的。
阵列天线方向图综合新技术研究阵列天线方向图综合新技术研究引言:天线技术作为通信领域的重要组成部分,对于增强通信系统的性能至关重要。
传统的单天线系统在满足日益增长的通信需求上已经无法满足现代社会对高速、高容量通信的要求。
而阵列天线技术作为一种重要的解决方案,通过利用多个小天线构成的阵列,能够实现灵活的信号处理和波束形成,从而提高通信系统的容量和可靠性。
本文将综合介绍阵列天线方向图的新技术研究,包括波束形成算法、阵列天线的布局和优化、阵列天线的信号处理以及在不同应用场景下的性能研究。
一、波束形成算法波束形成算法是实现阵列天线性能优化的核心技术之一。
目前常用的波束形成算法包括传统的线性加权算法和现代的非线性自适应波束形成算法。
传统的线性加权算法采用简单的均匀加权方式,对所有接收到的信号进行加权求和,其算法简单但效果有限。
而非线性自适应波束形成算法通过自适应地调整天线的相位和幅度权值,能够根据信号的到达角度和干扰环境动态调整,从而提高阵列天线的波束指向特性和抗干扰性能。
在波束形成算法中,最常用的是基于最小均方误差准则的自适应波束形成算法。
该算法通过不断调整天线的权值,使得波束方向上的信号功率最大化,抑制波束以外的干扰功率。
此外,还有一些改进的算法,如基于约束最优化的波束形成算法、基于子空间分离的波束形成算法等,这些算法在特殊场景下能够更好地适应和优化。
二、阵列天线的布局和优化阵列天线的布局和优化是提高阵列天线性能的重要手段。
在阵列天线的布局中,影响性能最大的是天线之间的距离和方向的选择。
一般情况下,天线之间的距离越小,波束方向图的主瓣宽度越窄,抗干扰性能越好。
而天线之间的方向选择则决定了波束的指向性能。
在实际部署中,常见的布局方式有线性阵列、圆形阵列、矩形阵列等多种形式,不同的布局方式对应不同的应用需求,需根据具体情况综合考虑。
在阵列天线的优化中,常用的是基于遗传算法、粒子群算法等优化算法。
这些算法通过随机搜索和迭代优化的方式,对阵列天线的布局进行优化,进而提高天线的指向性和经济性。
实验四、电波天线特性测试一、实验原理天线的概念无线电发射机输出的射频信号功率,通过馈线输送到天线,由天线以电磁波形式辐射出去。
电磁波到达接收地点后,由天线接下来(仅仅接收很小很小一部分功率),并通过馈线送到无线电接收机。
可见,天线是发射和接收电磁波的一个重要的无线电设备,没有天线也就没有无线电通信。
天线品种繁多,以供不同频率、不同用途、不同场合、不同要求等不同情况下使用。
对于众多品种的天线,进行适当的分类是必要的:按用途分类,可分为通信天线、电视天线、雷达天线等;按工作频段分类,可分为短波天线、超短波天线、微波天线等;按方向性分类,可分为全向天线、定向天线等;按外形分类,可分为线状天线、面状天线等;等等分类。
选择合适的天线天线作为通信系统的重要组成部分,其性能的好坏直接影响通信系统的指标,用户在选择天线时必须首先注重其性能。
具体说有两个方面,第一选择天线类型;第二选择天线的电气性能。
选择天线类型的意义是:所选天线的方向图是否符合系统设计中电波覆盖的要求;选择天线电气性能的要求是:选择天线的频率带宽、增益、额定功率等电气指标是否符合系统设计要求。
天线的方向性发射天线的基本功能之一是把从馈线取得的能量向周围空间辐射出去,基本功能之二是把大部分能量朝所需的方向辐射。
天线对空间不同方向具有不同的辐射或接收能力,这就是天线的方向性。
衡量天线方向性通常使用方向图,在水平面上,辐射与接收无最大方向的天线称为全向天线,有一个或多个最大方向的天线称为定向天线。
全向天线由于其无方向性,所以多用在点对多点通信的中心台。
定向天线由于具有最大辐射或接收方向,因此能量集中,增益相对全向天线要高,适合于远距离点对点通信,同时由于具有方向性,抗干扰能力比较强。
垂直放置的半波对称振子具有平放的“面包圈”形的立体方向图。
立体方向图虽然立体感强,但绘制困难,平面方向图描述天线在某指定平面上的方向性。
天线的增益增益是天线的主要指标之一,它是方向系数与效率的乘积,是天线辐射或接收电波大小的表现。
阵列天线方向图函数实验一、 实验目的1. 设计一个均匀线阵,给定d N d ,,,λθ画出方向图)(θF 函数图;2. 改变参数后,画出方向图)(θF 函数图,观察方向图)(θF 的变化并加以分析;3. 分析方向图)(θF 主瓣的衰减情况以及主瓣对第一旁瓣的衰减情况,确定dB3衰减对应的θ;二、 实验原理阵列输出的绝对值与来波方向之间的关系称为天线的方向图。
方向图一般有两类:一类是阵列输出的直接相加(不考虑信号及其来向),即静态方向图;另一类是带指向的方向图(考虑信号指向),当然信号的指向是通过控制加权的相位来实现的。
对于某一确定的M 元空间阵列,在忽略噪声的条件下,第k 个阵元的复振幅为),2,1(0M k e g x k j k Λ==-ωτ (2.1)式中:0g 为来波的复振幅,k τ为第k 个阵元与参考点之间的延迟。
设第k 个阵元的权值为k w ,那么所有阵元加权的输出得到的阵列的输出为),2,1(010M k e g w Y k j Mk k Λ==-=∑ωτ (2.2)对上式取绝对值并归一化后可得到空间阵列的方向图{}00max )(Y Y F =θ (2.3)如果),2,1(1M k w k Λ==式(2.3)即为静态方向图)(θF 。
下面考虑均匀线阵方向图。
假设均匀线阵的间距为d ,且以最左边的阵元为参考点(最左边的阵元位于原点),另假设信号入射方位角为θ,其中方位角表示与线阵法线方向的夹角,与参考点的波程差为θθτsin )1(1)sin (11d k cx ck -== (2.4)则阵列的输出为βθλπωτ)1(10sin )1(210100--=--=-=∑∑∑===k j Mk k d k jMk k j Mk k e g w eg w eg w Y k(2.5)式中:λθπβ/sin 2d =,λ为入射信号的波长。
当式(2.5)中),2,1(1M k w k Λ==时,式(2.5)可以进一步简化为)2/sin()2/sin(2)(00βββM M e Mg Y k M j == (2.6)可得均匀线阵的静态方向图,即)2/sin()2/sin()(0ββθM M F =(2.7)当式(2.5)中),2,1(,/sin 2,)1(M k d e w d d k j k d Λ===-λθπββ时,式(2.6)可简化为]2/)sin[(]2/)(sin[2)()1(00d d M j M M e Mg Y d ββββββ--=-= (2.7)于是可得到指向为d θ的阵列方向图,即]2/)sin[(]2/)(sin[)(d d M M F ββββθ--=(2.8)三、 实验过程1. 指向0=d θ静态方向图函数的实验1.1均匀线阵阵元个数N 对方向图函数)(θF 的影响sita=-pi/2:0.01:pi/2; lamda=0.03; d=lamda/2; n1=10; sita_d=0beta=2*pi*d*sin(sita)/lamda; beta_d=2*pi*d*sin(sita_d)/lamda; z11=(n1/2)*(beta-beta_d); z21=(1/2)*(beta-beta_d); f1=sin(z11)./(n1*sin(z21)); F1=abs(f1); figure(1);plot(sita,F1,'b'); hold on ; n2=20;beta=2*pi*d*sin(sita)/lamda;z12=(n2/2)*beta;z22=(1/2)*beta;f2=sin(z12)./(n2*sin(z22));F2=abs(f2);plot(sita,F2,'r');hold on;n3=30;beta=2*pi*d*sin(sita)/lamda;z13=(n3/2)*beta;z23=(1/2)*beta;f3=sin(z13)./(n3*sin(z23));F3=abs(f3);plot(sita,F3,'k')hold off;grid on;xlabel('theta/radian');ylabel('amplitude');title('¾ùÔÈÏßÕóÕóÔª¸öÊý¶Ô·½Ïòͼº¯Êý µÄÓ°Ïì'); legend('n1=10','n2=20','n3=30');分析:随着阵元数的增加,波束宽度变窄,分辨力提高。
基于矩阵束算法的阵列方向图综合研究的开题报告一、研究背景阵列信号处理在现代通信、雷达、声音、成像等领域中具有广泛的应用。
为了更好地处理阵列信号,需要用阵列方向图进行信号分析和处理,以便了解信号源的方位和角度。
然而,在实际应用中,阵列的方向图受到阵列的结构、阵列中天线的位置、方向图的精度和运算效率等方面的限制。
因此,在工程应用中需要采用一种有效且高效的方法来综合阵列方向图。
矩阵束算法是现代阵列信号处理的重要方法之一,该方法可以结合阵列的结构、阵列中天线的位置、方向图的精度和运算效率等因素,进行高效的阵列方向图综合。
因此,本研究将基于矩阵束算法,研究阵列方向图的综合方法,以提升阵列信号处理的精度和效率。
二、研究目标本研究的主要目标是基于矩阵束算法,研究阵列方向图的综合方法,以提升阵列信号处理的精度和效率。
具体来说,研究将涉及以下目标:1.研究基于矩阵束算法的阵列方向图综合方法,以理解该方法的原理和优势。
2.分析预处理方法对矩阵束算法的影响,以提高阵列方向图综合的精度和效率。
3.研究在高斯噪声环境下基于矩阵束算法的阵列方向图综合方法,以提高阵列信号处理的鲁棒性。
4.设计并实现基于矩阵束算法的阵列方向图综合算法,并进行性能测试,以验证算法的效率和精度。
三、研究内容和方法本研究将围绕以下内容展开:1.研究阵列信号处理、阵列方向图和矩阵束算法的基本概念和理论。
2.分析预处理方法对矩阵束算法的影响,研究常用的预处理方法,并进行比较分析。
3.研究在高斯噪声环境下基于矩阵束算法的阵列方向图综合方法,以提高阵列信号处理的鲁棒性。
4.设计并实现基于矩阵束算法的阵列方向图综合算法,并进行性能测试,以验证算法的效率和精度。
研究过程中,将采用以下方法:1.文献综述法:归纳和总结相关领域的最新研究成果和现有方法,为研究提供理论支持。
2.仿真实验法:利用计算机仿真技术,对研究对象进行建模和仿真,验证算法的性能和效果。
3.数据分析法:对实验数据进行统计学分析,挖掘数据背后的规律和趋势,为研究成果的发现提供支持。
低副瓣模组化阵列天线的方向图综合研究开题报告一、研究背景及意义随着无线通信技术的不断发展和普及,无线通信系统对天线性能的要求越来越高。
在天线性能方面,方向图是评价天线性能的一个重要指标。
常规的天线设计都是基于单独某一频段或带宽。
但是实际应用中,通信需求却是多频段、宽带、复杂环境下的。
因此,设计一种能够在多频段内提高天线方向图性能的天线解决方案成为了一个重要的研究方向。
在众多天线中,阵列天线是应用最广泛的一种,其采用阵列阻抗调配、相控阵等技术实现指定方向增益最大化,成为工业界和学术界的研究热点之一。
近年来,随着对天线设计的需求不断提高,低副瓣模组化阵列天线设计也逐渐成为研究热点。
低副瓣模组化阵列天线可以有效降低天线副瓣水平,提高天线指向性,减少桥接等无线网络应用中的多路径干扰,提高通信质量。
因此,对低副瓣模组化阵列天线的方向图进行综合研究,对于指导未来天线设计和无线通信应用具有重要的意义。
二、研究目的及内容本文的研究目的是针对低副瓣模组化阵列天线,综合研究其方向图,旨在探究提高天线指向性和降低副瓣水平的关键技术,并评价其性能表现。
本文的具体研究内容包括以下几个方面:1. 低副瓣模组化阵列天线的基本原理及设计。
2. 低副瓣模组化阵列天线的方向图设计与优化方法。
3. 低副瓣模组化阵列天线在多频段下的方向图性能表现评价。
4. 低副瓣模组化阵列天线在多路径干扰条件下的性能分析。
三、研究方法本文将采用以下方法进行研究:1. 理论探究。
通过查阅文献和国内外相关资料,探讨低副瓣模组化阵列天线的基本原理、方向图和设计方法。
2. 数值仿真。
采用天线仿真软件对低副瓣模组化阵列天线进行建模、仿真和优化,得出其方向图性能曲线和优化结果。
3. 实验验证。
基于仿真结果,设计低副瓣模组化阵列天线的样品,进行实验并评估其性能表现。
四、论文结构安排本文拟按以下顺序进行分析和阐述:第一章绪论介绍研究背景、意义、目的、内容、方法以及论文的结构安排等。
通信信号处置实验报告——阵列天线方向图的初步研究 11级通信(研) 刘晓娟 1一、实验原理:1、 智能天线的大体概念:智能天线是一种阵列天线,它通过调剂各阵元信号的加权幅度和相位来改变阵列的方向图形状,即自适应或以预制方式操纵波束幅度、指向和零点位置,使波束老是指向期望方向,而零点指向干扰方向,实现波束随着用户走,从而提高天线的增益,节省发射功率。
智能天线系统要紧由①天线阵列部份;②模/数或数/模转换部份;③波束形成网络部份组成。
本次实验着重讨论天线阵列部份。
2、 智能天线的工作原理:智能天线的大体思想是:天线以多个高增益的动态窄波束别离跟踪多个期望信号,来自窄波束之外的信号被抑制。
3、 方向图的概念:以入射角为横坐标,对应的智能天线输出增益为纵坐标所作的图称为方向图,智能天线的方向图有主瓣、副瓣等,相较其他天线的方向图,智能天线通常有较窄的主瓣,较灵活的主、副瓣大小、位置关系,和较大的天线增益。
与固定天线相较最大的区别是:不同的全职通常对应不同的方向图,咱们能够通过改变权值来选择适合的方向图,即天线模式。
方向图一样分为两类:一类是静态方向图,即不考虑信号的方向,由阵列的输出直接相加取得;另一类是带指向的方向,这种方向图需要考虑信号的指向,通过操纵加权相位来实现。
二、实验目的:一、设计一个均匀线阵,给出λ(波长),N (天线个数),d (阵元间距),画出方向图曲线,计算3dB 带宽。
二、通过操纵变量法讨论λ,N ,d 对方向图曲线的阻碍。
3、分析旁瓣相对主瓣衰减的程度(即幅度比)。
三、实验内容:一、公式推导与整理:权矢量12(,,......)T N ωωωω=,本实验旨在讨论静态方向图,因此此处选择ω=(1,1,......1)T 。
信号源矢量(1)()[1,,...]j j N T a e e ββθ---=,2sin dπβθλ=,幅度方向图函数()()H F a θωθ==(1)1sin2sin 2Nj n n N e βββ--==∑=sin(sin /)sin(sin /)n d n d πθλπθλ。
阵列天线方向图及其MATLAB仿真一.实验目的1.了解阵列天线的波束形成原理写出方向图函数2.运用MATLAB仿真阵列天线的方向图曲线3.变换各参量观察曲线变化并分析参量间的关系二.实验原理1.阵列天线:阵列天线是一类由不少于两个天线单元规则或随机排列并通过适当激励获得预定辐射特性的特殊天线。
阵列天线的辐射电磁场是组成该天线阵各单元辐射场的总和—矢量和由于各单元的位置和馈电电流的振幅和相位均可以独立调整,这就使阵列天线具有各种不同的功能,这些功能是单个天线无法实现的。
^2.方向图原理:对于单元数很多的天线阵,用解析方法计算阵的总方向图相当繁杂。
假如一个多元天线阵能分解为几个相同的子阵,则可利用方向图相乘原理比较简单地求出天线阵的总方向图。
一个可分解的多元天线阵的方向图,等于子阵的方向图乘上以子阵为单元阵列天线天线阵的方向图。
这就是方向图相乘原理。
一个复杂的天线阵可考虑多次分解,即先分解成大的子阵,这些子阵再分解为较小的子阵,直至得到单元数很少的简单子阵为止,然后再利用方向图相乘原理求得阵的总方向图。
这种情况适应于单元是无方向性的条件,当单元以相同的取向排列并自身具有非均匀辐射的方向图时,则天线阵的总方向图应等于单元的方向图乘以阵的方向图。
三.源程序及相应的仿真图1.方向图随n变化的源程序clear;sita=-pi/2::pi/2;lamda=;]d=lamda/4;n1=20;beta=2*pi*d*sin(sita)/lamda;z11=(n1/2)*beta;z21=(1/2)*beta;f1=sin(z11)./(n1*sin(z21));F1=abs(f1);figure(1);plot(sita,F1,'b');hold on;n2=25;:beta=2*pi*d*sin(sita)/lamda;z12=(n2/2)*beta;z22=(1/2)*beta;f2=sin(z12)./(n2*sin(z22));F2=abs(f2);plot(sita,F2,'r');hold on;n3=30;beta=2*pi*d*sin(sita)/lamda;z13=(n3/2)*beta;z23=(1/2)*beta;>f3=sin(z13)./(n3*sin(z23));F3=abs(f3);plot(sita,F3,'k')hold off;grid on;xlabel('theta/radian');ylabel('amplitude');title('方向图与阵列个数的关系'); legend('n=20','n=25','n=30');·结果分析:随着阵列个数n的增加,方向图衰减越快,效果越好;2.方向图随lamda变化的源程序clear;sita=-pi/2::pi/2;n=20;d=;lamda1=;beta=2*pi*d*sin(sita)/lamda1;z11=(n/2)*beta;z21=(1/2)*beta;f1=sin(z11)./(n*sin(z21));~F1=abs(f1);%·½ÏòͼÇúÏßfigure(1);lamda2=;beta=2*pi*d*sin(sita)/lamda2;z12=(n/2)*beta;z22=(1/2)*beta;f2=sin(z12)./(n*sin(z22));F2=abs(f2);lamda3=;beta=2*pi*d*sin(sita)/lamda3;z13=(n/2)*beta;,z23=(1/2)*beta;f3=sin(z13)./(n*sin(z23));F3=abs(f3)plot(sita,F1,'b',sita,F2,'r',sita,F3,'k');grid on;xlabel('theta/radian');ylabel('amplitude');title('方向图与波长的关系');legend('lamda=','lamda=','lamda=');四.,随着波长lamda的增大,方向图衰减越慢,收敛性越五.结果分析:不是很好;3.方向图随d变化的源程序clear;sita=-pi/2::pi/2;n=20;lamda=;d1=;beta=2*pi*d1*sin(sita)/lamda;z11=(n/2)*beta;z21=(1/2)*beta;【f1=sin(z11)./(n*sin(z21));F1=abs(f1);%·½ÏòͼÇúÏßfigure(1);plot(sita,F1,'b');hold on;d2=;beta=2*pi*d2*sin(sita)/lamda;z12=(n/2)*beta;z22=(1/2)*beta;f2=sin(z12)./(n*sin(z22));F2=abs(f2);-plot(sita,F2,'r');hold on;d3=;beta=2*pi*d3*sin(sita)/lamda;z13=(n/2)*beta;z23=(1/2)*beta;f3=sin(z13)./(n*sin(z23));F3=abs(f3)plot(sita,F3,'k')hold off;grid on;xlabel('theta/radian');ylabel('amplitude');title('·½ÏòͼÓëÌìÏßÕóÁмä¸ôdµÄ¹Øϵ'); legend('d1=','d=','d=');结果分析;随着阵元之间间隔的增加,方向图衰减越快,主次瓣的差距越大,次瓣衰减越快,效果越好。
通信信号处理实验报告
——阵列天线方向图的初步研究 11级通信(研) 刘晓娟 113128301
一、实验原理:
1、智能天线的基本概念:智能天线是一种阵列天线,它通过调节各阵元信号的加权幅度和相位来改变阵列的方向图形状,即自适应或以预制方式控制波束幅度、指向和零点位置,使波束总是指向期望方向,而零点指向干扰方向,实现波束随着用户走,从而提高天线的增益,节省发射功率。
智能天线系统主要由①天线阵列部分;②模/数或数/模转换部分;③波束形成网络部分组成。
本次实验着重讨论天线阵列部分。
2、智能天线的工作原理:智能天线的基本思想是:天线以多个高增益的动态窄波束分别跟踪多个期望信号,来自窄波束以外的信号被抑制。
3、方向图的概念:以入射角为横坐标,对应的智能天线输出增益为纵坐标所作的图称为方向图,智能天线的方向图有主瓣、副瓣等,相比其他天线的方向图,智能天线通常有较窄的主瓣,较灵活的主、副瓣大小、位置关系,和较大的天线增益。
与固定天线相比最大的区别是:不同的全职通常对应不同的方向图,我们可以通过改变权值来选择合适的方向图,即天线模式。
方向图一般分为两类:一类是静态方向图,即不考虑信号的方向,由阵列的输出直接相加得到;另一类是带指向的方向,这类方向图需要考虑信号的指向,通过控制加权相位来实现。
二、实验目的:
1、设计一个均匀线阵,给出λ(波长),N (天线个数),d (阵元间距),画出方向图曲线,计算3dB 带宽。
2、通过控制变量法讨论λ,N ,d 对方向图曲线的影响。
3、分析旁瓣相对主瓣衰减的程度(即幅度比)。
三、实验内容:
1、公式推导与整理: 权矢量12(,,......)
T
N ω
ωωω=,本实验旨在讨论静态方向图,所以此处选择
ω
=(1,1,......1)T 。
信号源矢量(1)()
[1,,...]j j N T
a e
e
β
β
θ---=,2s in d
πβθλ
=
, 幅度方向图函数()()H F a θωθ==
(1)1
s in
2
s in
2
N
j n n N e
β
ββ
--==
∑
=
sin (sin /)sin (sin /)
n d n d πθλπθλ。
主瓣宽度0
2a rc s in
B W N d
λ
=。
2、选择合适的参数,编写matlab 程序绘制方向图函数,见下图2-1
4、讨论λ,N ,d 对方向图曲线的影响。
图4-1波长对方向图的影响
虚线——波长=0.01;
间断线——波长=0.02;
实线——波长=0.03;
图4-2:天线间隔对方向图的影响
虚线——d1=lamda/2;
间断线——d2=lamda/3;
实线——d3=lamda/4
图4—3 阵元个数对方向图的影响
虚线——N1=10;
间断线——N2=15;
实线——N3=20;
四、实验结论:
1、通过对图4-1的观察,可以看出,在一定范围内,波长越长,旁瓣对主瓣的衰减越小,零分贝带宽和3分贝带宽都明显增大,此时天线的性能降低;
2、通过对图4-2的分析,可得,当天线间隔小于等于半波长时,间隔越大性能越好,间隔越小会出现多个主瓣,
3、分析图4-3可以看出,阵元个数越多,主瓣的幅度越大,旁瓣对主瓣的衰减也越大,同时零分贝带宽和3分贝带宽都越小,即天线性能越好。
五、实验心得:
经过本次实验,我对智能天线有了一个更深刻的了解,同时也增强了自己在matlab方面的编程能力,但是依然存在很多不足,在以后的学习中还要继续努力,增强理论和实践的结合。
六、附:程序代码
程序一:
lamda1=0.01;
lamda3=0.02;
lamda2=0.03;
d=lamda/2;
N=10;
sita=-pi/2:0.001:pi/2;
beta1=2*pi*d*sin(sita)/lamda1;
beta2=2*pi*d*sin(sita)/lamda2;
beta3=2*pi*d*sin(sita)/lamda3;
A1=sin(N*beta1/2);
A2=sin(N*beta2/2);
A3=sin(N*beta3/2);
B1=N*sin(beta1/2);
B2=N*sin(beta2/2);
B3=N*sin(beta3/2);
F1=abs(A1./B1);
F2=abs(A2./B2);
F3=abs(A3./B3);
plot(sita,F1,':',sita,F2,'-',sita,F3,'--'); grid on;
程序二:
lamda=0.01;
d1=lamda/2;
d2=lamda/3;
d3=lamda;
N=10;
sita=-pi/2:0.01:pi/2;
beta1=2*pi*d1*sin(sita)/lamda;
beta2=2*pi*d2*sin(sita)/lamda;
beta3=2*pi*d3*sin(sita)/lamda;
A1=sin(N*beta1/2);
A2=sin(N*beta2/2);
A3=sin(N*beta3/2);
B1=N*sin(beta1/2);
B2=N*sin(beta2/2);
B3=N*sin(beta3/2);
F1=abs(A1./B1);
F2=abs(A2./B2);
F3=abs(A3./B3);
plot(sita,F1,':',sita,F2,'-',sita,F3,'--'); grid on;
程序三:
lamda=0.01;
d=lamda/2;
N1=10;
N2=15;
N3=20;
sita=-pi/2:0.01:pi/2;
beta=2*pi*d*sin(sita)/lamda;
A1=sin(N1*beta/2);
A2=sin(N2*beta/2);
A3=sin(N3*beta/2);
B1=N1*sin(beta1/2);
B2=N2*sin(beta2/2);
B3=N3*sin(beta3/2);
F1=abs(A1./B1);
F2=abs(A2./B2);
F3=abs(A3./B3);
plot(sita,F1,':',sita,F2,'-',sita,F3,'--'); grid on;。