2012中国教育机器人大赛“机器人游深圳”中学组比赛规则
- 格式:pdf
- 大小:198.19 KB
- 文档页数:4


2012年校内机器人大赛机器人大赛组委会2012-9-15大赛主题及规则一、比赛主题:追求卓越,再创辉煌二、比赛场地说明1)比赛场地区域为5000mm×5000m m的正方形区域。
2)比赛场地地面用2mm厚的密度板制成。
3)各区域中的杆是直径为90mm,高为600mm的圆柱体,公共栏杆高为1200mm。
4)比赛场地及每个区域具体示意如图所示。
(1)双方比赛区域A中各有一个面积为200mm×200mm的区域为小球仓库,仓库中放置的小球数量为9个。
(2)双方比赛区域B中各有一个面积为150mm×150mm的区域为小球仓库,仓库中允许1号机器人放置的小球数量最多为4个。
(3)机器人各启动区是450mm×450mm的方形区域。
二、比赛任务说明手动控制机器人:以下称1号机器人;自动控制机器人:以下称2号机器人;手动控制机器人运动区域:以下称区域A;自动控制机器人运动区域:以下称区域B;手动控制机器人运动区域的储球域:以下称仓库A;自动控制机器人运动区域的储球域:以下称仓库B;各参赛队具有两台机器人参加比赛,即具有1号机器人和2号机器人。
要求参赛队自行设计、制作机器人参加比赛,参赛的2号机器人必须是自主程序控制。
比赛分为两队进行,每队机器人总重量不得超过15Kg,数量不得超过2个。
双方机器人放在各自起始位置,比赛开始后,操作手可以操纵1号机器人,1号机器人(只能在区域A运行,机械手可以延伸到仓库B)将仓库A的小球抓取后,放置在仓库B。
仓库B的小球数量不能超过5个,即只有在5个以下(含5个)1号机器人才可以继续向仓库B放置小球。
当仓库B有小球,2号机器人(只能在区域B运行)可以开始抓取小球将其投入自己的篮筐中。
只有当2号机器人向自己的篮筐中投入的小球数量至少达到5个才可以向旗舰篮筐(公共篮筐,场地中最高的一个篮筐)中投入小球。
2号机器人抓取完小球后可沿杆爬行到一定高度后放置小球。
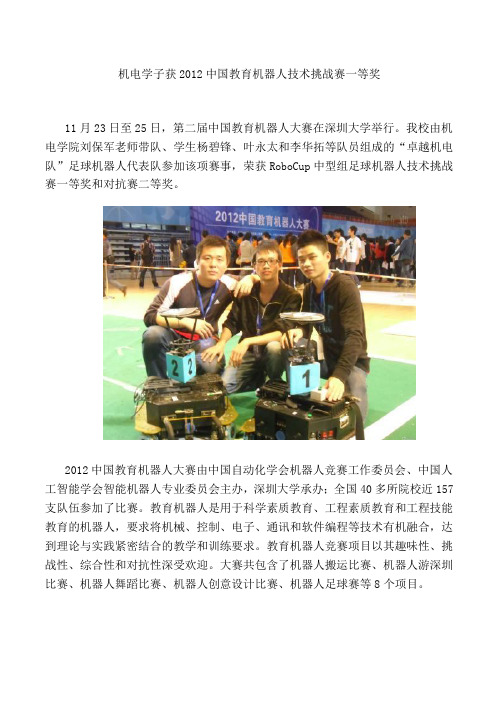
机电学子获2012中国教育机器人技术挑战赛一等奖
11月23日至25日,第二届中国教育机器人大赛在深圳大学举行。
我校由机电学院刘保军老师带队、学生杨碧锋、叶永太和李华拓等队员组成的“卓越机电队”足球机器人代表队参加该项赛事,荣获RoboCup中型组足球机器人技术挑战赛一等奖和对抗赛二等奖。
2012中国教育机器人大赛由中国自动化学会机器人竞赛工作委员会、中国人工智能学会智能机器人专业委员会主办,深圳大学承办;全国40多所院校近157支队伍参加了比赛。
教育机器人是用于科学素质教育、工程素质教育和工程技能教育的机器人,要求将机械、控制、电子、通讯和软件编程等技术有机融合,达到理论与实践紧密结合的教学和训练要求。
教育机器人竞赛项目以其趣味性、挑战性、综合性和对抗性深受欢迎。
大赛共包含了机器人搬运比赛、机器人游深圳比赛、机器人舞蹈比赛、机器人创意设计比赛、机器人足球赛等8个项目。

第十二届中国青少年机器人竞赛机器人综合技能高中组比赛须知⑴在准备区和比赛区不得用各种相机拍摄场地图或赛台。
⑵在2.5小时的准备时间内,可以在准备区和比赛区的赛台上进行调试,但每支参赛队不应长时间占用赛台。
在比赛区赛台上的调试必须在开始比赛前15分钟结束。
⑶根据本队使用的器材向裁判领取相应的编程软件光盘并自行安装到计算机上。
关于计算机使用方面的问题,可以要求裁判员或志愿者协助。
⑷ A、B、C三个赛台中央的8个拼装块的图形是完全一样的。
除“健身长跑”要在赛台中央的非十字线拼装块上完成外,其它要完成的任务分布在周围的16个十字线拼装块上,如下表所示:任务所在的拼装块编号多米诺点球大战摘果子巧避障碍保龄球健身长跑赛台A612421非十字线赛台B1241321非十字线赛台C612413非十字线超出规定完成的任务不加分。
⑸提示:①各参赛队应按照场地图右上角所标的第一、二、三轮比赛所用的赛台的顺序,在2.5小时的准备时间内首先完成第一轮比赛的程序,剩余的时间及各轮之间的等候时间内再完成第二、三轮的程序。
②所发的场地图上有全部任务,对某一赛台编程时,可自己用一小纸片将该赛台上没有的任务盖住,以免混淆。
③每棵“果树”上的“果子”数已用数字标在图上。
⑹完成“多米诺骨牌”或“点球大战”任务推倒骨牌或击球时,机器人的部分结构可以伸入有骨牌或“足球”的拼装块,但轮子不能进入该拼装块,否则,完成任务无效;完成“保龄球”或“巧避障碍”任务释放小球时,机器人的任何部分在地面的正投影不得进入有“球瓶”或障碍的拼装块,否则完成任务无效;完成“摘果子”任务时,机器人可以进入有“果树”的拼装块,可以脱离该拼装块中的黑色引导线;完成健身长跑任务时机器人必须不脱离黑线地跑完所有的非十字拼装块(不要求连续)。
⑺准备时间结束后,机器人应在准备区边上列队。
参赛队在第一次上场前领取自己的机器人,此后,在两场比赛间隙可对自己的机器人进行调试,但只能使用准备区的赛台。
中小学生智能机器人竞赛规则一、虚拟机器人(迷宫灭火、轨迹综合竞技)(中小学)(一)竞赛目标通过信息技术创新手段,以虚拟机器人为载体实现走轨迹、迷宫灭火的过程,使青少年对机器人的搭建和编程产生兴趣,增进了解,实现机器人的大众化。
旨在考核参赛选手对操控智能机器人相关知识的综合运用能力,有助于提高学生的动手与动脑能力。
(二)竞赛环境1.软件环境(1)操作系统:WINDOWS98/2000/XP(NetFramework1.1 DirectX9.0c)(2)比赛系统:纳英特3D机器人仿真系统软件2.硬件环境(1)电脑硬件配置:CPU600MHZ以上,内存128M以上,显卡8M支持3D(推荐配置CPU1G,内存256M,显卡32M支持3D)。
(2)电脑数量:组委会提供竞赛现场编程用电脑(每人一台),参赛选手不允许携带任何可以复制文件的工具进入竞赛现场(如U盘等)。
(三)竞赛过程在规定时间内,参赛选手利用计算机模拟完成机器人的搭建、编程及调试,然后在计算机上模拟实现仿真机器人自主走轨迹和走迷宫灭火的全部过程。
(四)比赛场地1.500像素×500像素的场地由一段轨迹和迷宫组成;轨迹由线宽2cm 的黑线和可换拼装块组成,迷宫由若干白色障碍块(长:20厘米、宽:20厘米、厚:2厘米)组成,四周边框、障碍块为白色,迷宫内房间门口有黑线标示。
2.迷宫入口宽20cm ,开始时迷宫活动门是被封闭的,机器人成功越过可换拼装块,迷宫活动门会自动打开。
3.程序不允许使用时间延时法或类似时间延时法,可使用红外传感器走迷宫,灰度传感器走轨迹和指南针传感器转弯。
4.可换拼装块说明:(五)竞赛任务小学组:比赛机器人从指定的起点出发,开始计时,顺利越过可换拼装块后迷宫活动门会打开,机器人继续沿轨迹走到迷宫活动门处进入迷宫,在迷宫四个房间中寻找一处蜡烛,完成灭火任务。
到达房间标准为整个机器人越过房间门口黑线。
(1)普通轨迹线组成,90度转角和T形轨迹组成。
2012 GAME RULEhttp://www.aburobocon2012.hk1、机器人设置1.1每个队伍需要准备:一个手动机器人,自动机器人和一个收集机器人1.2比赛开始前每个队伍有一分钟时间设置机器人。
1.3包括手动机器人操作手,每个小组只有三个人可以设置机器人。
一旦比赛开始,任何一支队伍在一分钟之内未能完成机器人的设置就可以重新设置。
2、游戏场和对象2.1比赛场地包括面积13,000毫米x 13,000毫米,并被一个高度为100mm,厚度为50mm 的木栅栏包围。
木栅栏是用螺丝固定到外地。
游戏领域划分为两个团队同样由一个高度为100mm,厚度为50mm的木栅栏。
参赛队伍是红队和蓝队。
(图1-4)2.2游戏场地包括手动机器人区,自动机器人区,出发点,重新启动点,装卸区,共同区和海岛区。
区域的符号,如A,C,M,L1,L2,L3,S1和S2是没有必要在真正的比赛场的地板上画。
2.3手动机器人区及自动机器人区2.3.1自动机器人区的地板上绘制宽度为30毫米的亚光贴纸白色线条。
白线内的每一边的白线为470毫米。
手动机器人区和自动机器人区之间有一个高度为100mm,厚度为50mm 的木栅栏将他们分开。
(图2,图3)2.4启动点2.4.1手动机器人必须在手动机器人的起点启动(M)。
2.4.2收集机器人是摆在收集机器人的起点(C),收集机器人将被手动机器人拾起。
2.4.3自动机器人必须在自动机器人的起点启动(一)。
(图1)2.5共同区2.5.1共同区有一个高度为100mm,宽度为500mm,长度为1985毫米的黄色的长方形。
深度为12mm,直径的452毫米的凹槽位于共同区的表面。
两个花篮分别放置在这两个凹槽,在比赛开始之前。
每队只能收集一个篮子。
(图2,图13)2.6 两筐篮2.6.1两个篮子分别放置在公共区的两个凹口处。
每个篮子由三部分组成;篮子直径为450mm和高度为400mm(475),由片材和塑料网或尼龙网(低碳钢外螺纹杆加入)制成,基底部直径为450mm由HIPS(475)表,气缸直径为80mm,高度为388毫米由PVC管制成。
深圳市机器人比赛规则(三)第一章基本规则1、各参赛队员应自备用于程序设计的电脑和参赛用的各种器材,各项竞赛使用的编程语言不限。
2、单项竞技比赛过程中,参赛队员一般不能增加、删除、变更机器人的软件和硬件,如需加固硬件,须经裁判员同意,3、中小学组青少年智能机器人单项竞技长期题比赛、FLL机器人竞赛、青少年机器人足球比赛,不要求现场搭建与编程,只给现场调试时间45分钟。
所有即兴题的比赛,必须现场搭建、编程与调试,时间为90分钟。
即兴题赛所用的器材必须拆散,不能携带成品机器人或模型。
参赛机器人必须由参赛队员在现场设计和搭建,领队、教练员不得在场外指导。
4、比赛方式:智能机器人单项竞技赛、FLL项目竞赛,赛前将进行电子抽签,将不再进行决赛。
竞赛采用大循环、三个回合的比赛方式,取其最好成绩作为最终成绩。
参赛队在每个回合比赛之前,有一分钟的准备时间;青少年机器人足球比赛采用预赛和决赛的方式进行。
5、比赛前,参赛队员应接受评委对参赛机器人的资格审查。
合格后,按评委要求,把参赛机器人摆放到指定停泊处。
此后,除评委外,任何人都不能再触摸参赛机器人。
否则,将给予黄牌警告以至取消比赛资格。
6、比赛过程中只允许参赛选手、裁判员和有关工作人员进入比赛场地,其他人员不得进入。
凡擅自进入者,给予黄牌警告。
7、参赛队员可以控制机器人的启动。
机器人起动后,应让其自动运行完成规定任务,参赛队员不得再进行干预。
8、比赛中因特殊事故未完成规定任务的选手,可向项目裁判长提出申请,并经总裁判长批准后方可重新比赛,否则成绩无效。
9、本届比赛中,机器人单项竞技赛、机器人足球比赛、机器人工程设计比赛、FLL 比赛等赛事同时举行,参赛选手不得兼项。
10、参赛队员必须服从裁判,比赛进行中如发生异议,须由领队填写复议申请表(式样附后)申请复议,裁判委员会授权总裁判长全权处理,接受和对复议事项做出最终裁决,并请相关的项目裁判长向申请陈诉的单位或代表队做出说明。
2012年深圳市中小学电脑机器人活动获奖名单一、竞赛类项目获奖名单(一)机器人灭火比赛:1、小学组一等奖:南山区蛇口学校二队(参赛学生:柳道朋,指导老师:董健)二等奖:南山区蛇口学校一队(参赛学生:高俊伟,指导老师:董健)三等奖:⑴罗湖区靖轩小学(参赛学生:张楚凡,指导老师:陈漫)⑵光明新区实验学校一队(参赛学生:康圳,指导老师:胡畔)2、初中组一等奖:南山区蛇口学校二队(参赛学生:庄裕荃,指导老师:董健)二等奖:育新学校(参赛学生:马秋汉,指导老师:江贞红)三等奖:南山区蛇口学校一队(参赛学生:赖彦彬,指导老师:董健)(二)机器人足球比赛:1、小学组:一等奖:福田区园岭小学本部二队(参赛学生:蒋玥,指导老师:罗郎纳、胡泊)二等奖:南山区向南小学一队(参赛学生:刘逸飞,指导老师:高德辉)三等奖:⑴罗湖区靖轩小学(参赛学生:温广栋,指导老师:陈漫)⑵南山区向南小学二队(参赛学生:刘子昂,指导老师:高德辉)2、初中组:一等奖:宝安区福永中学一队(参赛学生:陈嘉森、彭鑫玮,指导老师:管瑞金)二等奖:育新学校(参赛学生:黄永胜、张桂钟,指导老师:汪涛、江贞红)三等奖:宝安区福永中学二队(参赛学生:张锐鹏、刘瀚宇,指导老师:陈少芸)3、高中组:一等奖:坪山高级中学一队(参赛学生:孙楚、黄永峰,指导老师:李政霖)二等奖:坪山高级中学二队(参赛学生:谢旭佳、吴建鹏,指导老师:李政霖)(三)机器人篮球比赛:一等奖:坪山高级中学一队(参赛学生:彭一飞、黄锦文,指导老师:李政霖)二等奖:坪山高级中学二队(参赛学生:彭倩、吴辉超,指导老师:李政霖)(四)FLL机器人工程挑战赛1、小学组:一等奖:⑴龙华新区上芬小学二队(参赛学生:刁幸荣、赵佳晟、钟捷喜,指导老师:杨军)⑵深圳实验学校一队(李天玥、谷知峰)二等奖:⑴龙华新区上芬小学一队(参赛学生:欧阳宇翔、阳林峰、林廷都,指导老师:刘传鲁)⑵龙岗区龙城小学(参赛学生:罗中祺、高泽森,指导老师:侯为科)三等奖:⑴南山实验学校一队(参赛学生:陈子兮、陈海川,指导老师:但非)⑵深圳实验学校二队(参赛学生:吴辰曦、廖曼庭,指导老师:杨浩丁)⑶宝安区流塘小学(参赛学生:叶建兴、陆施帆、杨盟,指导老师:叶滨洁)2、初中组:一等奖:⑴龙岗区龙城初级中学二队(参赛学生:丁浩文、罗家骥,指导老师:黄河)⑵深圳实验学校一队(参赛学生:陶炬豪、郭翼藤,指导老师:刘海峰)二等奖:⑴龙岗区龙城初级中学一队(参赛学生:张宇峰、方卓夫,指导老师:黄河)⑵南山实验学校荔林中学(参赛学生:花明、姜铭瑄,指导老师:刘轩林)三等奖:⑴南山区育才二中(参赛学生:周嘉澎、王子初,指导老师:蔡京良)⑵深圳实验学校二队(参赛学生:贺一桓、梁珏桐,指导老师:曾繁均)(五)人形机器人全能挑战赛:一等奖:宝安区新湖中学三队(参赛学生:彭锦庚,指导老师:赖晓青)二等奖:⑴宝安区新湖中学二队(参赛学生:张成,指导老师:赖晓青)⑵深圳第二实验学校(参赛学生:陈佰灿,指导老师:刘树明)三等奖:育新学校(参赛学生:陈英杰,指导老师:江贞红)(六)机器人现场制作比赛:1、小学组:一等奖:⑴深圳实验学校二队(参赛学生:卓煜钊、王嘉浩,指导老师:杨浩丁)⑵深圳小学(参赛学生:阮富海,指导老师:萧霖)二等奖:⑴罗湖区北斗小学(参赛学生:邱思铭,指导老师:徐军)⑵南山区学府小学海文部(参赛学生:郭智帆,指导老师:汪奇龙)⑶福田区皇岗小学(参赛学生:陈瀚为,指导老师:张永才)优秀奖:⑴宝安区福永中心小学(参赛学生:谢一维、谭剑雄、胡昊天,指导老师:范海明)⑵深圳实验学校一队(参赛学生:牛星淇、邱星然,指导老师:杨浩丁)⑶龙华新区上芬小学一队(参赛学生:陈思航、颜森,指导老师:马艳)⑷龙华新区上芬小学二队(参赛学生:谢鹏程、陈思远,指导老师:马艳)⑸龙华新区上芬小学三队(参赛学生:涂维斯、刘志豪,指导老师:马艳)⑹宝安区兴围小学(参赛学生:张子衡阴飞虎林禧,指导老师:熊建成)⑺宝安区流塘小学一队(参赛学生:刘美珊、梁思琪、谢思鹏,指导老师:韩俊)⑻宝安区流塘小学二队(参赛学生:陈旖艺、张颖婷、赖莹,指导老师:韩俊)⑼宝安区宝城小学一队(参赛学生:曾尧杰徐洋,指导老师:张聪华、覃焕家)⑽宝安区宝城小学二队(参赛学生:黄达维万卓然,指导老师:张聪华、覃焕家)⑾龙岗区实验学校一队(参赛学生:林郭、钟皓宇,指导老师:钟慧峰)⑿龙岗区实验学校二队(参赛学生:刘润龙、李泽轩,指导老师:钟慧峰)⒀龙岗区实验学校三队(参赛学生:黄梓涛、蔡晨霖,指导老师:钟慧峰)⒁龙岗区龙城小学(参赛学生:楼泽鹏、巫文渊,指导老师:侯为科)⒂福田区园岭小学一分部(参赛学生:金庆春,指导老师:李铁华、魏晓丽)⒃南山区向南小学一队(参赛学生:吕思静,指导老师:高德辉)⒄南山区向南小学二队(参赛学生:刘嘉怡,指导老师:高德辉)⒅南山区南油小学(参赛学生:黄瑜、张浩,指导老师:肖英)⒆光明新区实验学校一队(参赛学生:黄德明,指导老师:胡畔)2、初中组:一等奖:⑴南山外国语学校高新部(参赛学生:唐萌泽,指导老师:曲雁鹏)⑵南山区蛇口学校一队(参赛学生:赖彦彬,指导老师:董健)二等奖:⑴育新学校二队(参赛学生:卢伟东,指导老师:汪涛)⑵龙岗区龙城初级中学(参赛学生:蔡基兴、叶发展,指导老师:黄河)⑶育新学校一队(参赛学生:洪家威,指导老师:江贞红)优秀奖:⑴龙华新区龙华中学(参赛学生:张润、廖家鹏,指导老师:陈峰)⑵南山区蛇口学校二队(参赛学生:庄裕荃,指导老师:董健)3、高中组:一等奖:深圳中学二队(参赛学生:王楷鑫、张东于,指导老师:麦志彪)二等奖:深圳中学一队(参赛学生:苏子聪、黄煜桐,指导老师:麦志彪)(七)机器人迷宫比赛:一等奖:北大附中深圳南山分校(参赛学生:胥淮,指导老师:彭勤)二等奖:南山区阳光小学(参赛学生:彭宇豪,指导老师:侯益华)二、评比类项目获奖名单(一)机器人相关教学课例一等奖:⑴给机器人装“眼睛”——看物体(作者:高德辉,单位:南山区向南小学)⑵有耳朵的机器人(作者:董健,单位:南山区蛇口学校)⑶大棚温度控制系统(作者:田辉,单位:福田区益田小学)⑷智能循迹机器人(作者:吴晓茜,单位:南山区育才二中)⑸机器人走轨迹(作者:李发成,单位:盐田区盐港中学)二等奖:⑴制作路灯管理员(作者:鲍华,单位:光明新区实验学校)⑵海面搜救——变量赋值与循环结构(作者:何微,单位:第三高级中学)⑶设计导盲机器人(作者:陈美婵,单位:宝安区新湖中学)⑷设计制作循迹机器人(一)(作者:黄河,单位:龙岗区龙城初中)⑸设计楼道自动感应灯(作者:刘春晖、何燕辉,单位:南山区同乐学校)⑹走迷宫机器人(作者:刘树明,单位:第二实验学校)⑺设计巡视四周的机器人警察(作者:邱海华,单位:光明新区实验学校)⑻设计能避障的机器人(作者:袁敏,单位:盐田区田东中学)三等奖:⑴设计能避障的机器人(作者:陈琼珊,单位:光明新区实验学校)⑵设计循迹机器人(作者:储媛媛,单位:盐田区田东中学)⑶设计楼道自动感应灯(作者:储晓刚,单位:第二实验学校)⑷楼道自动感应灯(作者:郭春梅,单位:光明新区实验学校)⑸避障机器人(作者:江思萍,单位:福田区荔园外国语小学)⑹机器人看物体(作者:陈淑慧,单位:盐田区外国语学校)⑺运动模块与循环(作者:胡震寰,单位:第二实验学校)⑻避障机器人(作者:郑玉清,单位:坪山新区坪山中学)(二)机器人相关教学课件一等奖:⑴机器人学习网站(作者:鲍华,单位:光明新区实验学校)⑵神奇的机器人(作者:黄河,单位:龙岗区龙城初中)二等奖:⑴丰富多彩的机器人世界(作者:田辉,单位:福田区益田小学)⑵设计循迹机器人(作者:储媛媛,单位:盐田区田东中学)⑶机器人看物体(作者:陈淑慧,单位:盐田区外国语学校)三等奖:⑴声控小车(作者:江贞红,单位:育新学校)⑵避障机器人-灭火任务(作者:陈漫,单位:罗湖区靖轩小学)(三)机器人相关教学论文一等奖:⑴基于RCX的比赛用搜救机器人的构建与实现(作者:李发成,单位:盐田区盐港中学)⑵灵活使用游戏,让机器人教学更精彩(作者:吴晓茜,单位:南山区育才二中)⑶电脑机器人科技活动的实践与探索(作者:高德辉,单位:南山区向南小学)二等奖:⑴基于机器人的程序设计教学初探(作者:郑伟颖,单位:盐田区沙头角中学)⑵浅谈机器人课堂中如何培养学生的创新能力(作者:吴媚,单位:宝安区观澜中学)⑶善用现代教育技术提高机器人课堂教学有效性(作者:董健,单位:南山区蛇口学校)⑷引入数字故事,创新机器人课堂(作者:张晓燕,单位:坪山新区光祖中学三等奖:⑴机器人教学中的任务驱“动”(作者:黄河,单位:龙岗区龙城初中)⑵初中机器人教育初步探索(作者:何微,单位:第三高级中学)⑶基于诺宝RC环境下的机器人走简单轨迹(作者:李发成,单位:盐田区盐港中学)⑷机器人课程对问题学生的影响(作者:江贞红,单位:育新学校)。
2012中国教育机器人大赛“机器人游深圳”
中学组比赛规则
(Ver:1.0)
中国教育机器人大赛技术委员会
2012-8
一、 比赛简介
比赛目的
设计一个基于单片机的小型轮式机器人从起始点出发到达目的地。
参赛机器人按比赛场地道路轨迹移动,在规定时间内,游历尽量多的景点,获得尽量多的分数。
在游历完所有景点后回到出发地。
比赛内容与任务
“机器人游深圳”竞赛项目要求参赛机器人在规定时间内,从出发点出发“OPEN 起始站”游历尽量多的景点,并最后返回起点。
机器人类型 时间
轮式机器人 180秒
二、 比赛规则
1.比赛场地
①比赛场地为长2000mm×1500mm的长方形区域,底部为绿色。
比赛地图材料:为广
告灯布,参赛队可以直接将场地地图拿到广告公司直接喷绘,也可以从技术委员会
指定的厂家购买。
②道路是由有宽度约2.2cm的黑色引导线用以引导机器人循迹的。
比赛机器人从“出
发区OPEN”区域出发,上面布有黑色导引线。
2.比赛区域标识:景点介绍牌
材料:有机玻璃板,尺寸:120mm
3.每支代表队参赛机器人数量
每支代表队参赛机器人数量为1~2台,比赛次数为2次,每次只允许1台机器人比赛,取成绩最好的一次计分。
4.比赛机器人要求:为了公平公正的比赛,本次比赛对参赛队
使用的机器人做了如下规定
①控制器要求:可以使用任何型号的控制器芯片进行比赛。
②参赛机器人只限定使用舵机轮式移动机器人。
③参赛机器人必须带有面包板,传感器电路要在面包板上体现并实现。
④机器人尺寸:机器人在地面投影不超出:长220mm×宽140mm。
⑤机器人重量:≤500g。
⑥在规则满足规则的前提下,可以对机器人的机械和传感器进行扩展。
5.景点得分要求
①共有15个固定景点,所有固定景点都在其所处道路的尽头,所有景点的分值相
同,为1分。
②到达固定景点的标志是,比赛机器人(包括所携带传感器或零件)有明显碰触
景点介绍牌的行为,就认为机器人已游览了此景点。
(比如使用触须传感器碰
撞,当碰撞到景点介绍牌时,有掉头或是转向行为)
三、规则与裁判
每场比赛将委派两名裁判执行裁判工作,一名技术裁判,一名计时裁判。
裁判员
在比赛过程中的判罚不容争议,若有异议,待比赛结束后,可拿出证据(如:视
频资料等)向技术委员会提起申诉。
裁判员职责:
①核对参赛队伍和参赛机器人资质。
②监督比赛所有犯规现象并记录。
③记录比赛成绩和时间。
四、比赛要求
①正式比赛前,参赛机器人将统一收回,并摆放在指定位置。
比赛时到指定区域取
自己的机器人比赛。
比赛完成后再次放回指定区域,待所有机器人比赛完后方可
拿走。
②各个参赛队通过现场抽签的方式决定比赛顺序。
③比赛5分钟前,各参赛队允许对机器人进行调试。
④每队机器人比赛总时间不超过6分钟。
⑤比赛开始前20分钟,所有参赛队必须到达比赛现场,否则视为放弃比赛。
⑥每支代表队参赛机器人数量为1~2台,比赛次数为2次,每次只允许1台机器人比
赛,取成绩最好的一次计分。
五、计分细则
①比赛总分为X分(所有景点分数)+1分(回到出发区)。
每个队机器人总得分为机器人到达景点的得分总和。
每个景点得分相同为1分,若机器人在规定时间内光顾了所有景点,并且最终到
达目的地,则再追加1分。
②在比赛过程中参赛机器人不能盲走,必须循迹行走。
如果脱离黑色轨迹行走超过
2秒钟视为本次比赛结束,得分按已经碰触过的景点得分相加。
③每个景点机器人只能触碰一次,若多次触碰同一景点,以只触碰该景点1次计分。
④回到出发区的标志是至少车体的一个轮子进入出发区且停留时间在5秒钟以上。
⑤在规定时间内,游历的景点越多得分越高,排名越靠前。
如果两队分数相同,以
时间短的参赛队排名靠前。
出现以下情况,不计算参赛队得分:
①参赛机器人在裁判命令开始比赛后10秒不能运动的,不计得分。
②比赛过程中不能人为干扰机器人完成比赛任务,一旦机器人启动则必须自主完成
比赛任务,否则不计得分。
③比赛队伍之间相互借用机器人,则不计算相关队伍得分。
④在比赛过程中,对裁判判罚有争议且找裁判理论的,裁判有权取消该队成绩。