南航自动控制原理2007年研究生入学考试
- 格式:doc
- 大小:718.50 KB
- 文档页数:4

820自动控制原理考试大纲920自动控制原理(专业学位)考试大纲《自动控制原理》考试内容包括: 经典控制理论和现代控制理论。
第一章-自动控制的一般概念:控制系统的一般概念、名词术语、发展史;控制系统的分类;控制系统的组成;典型外作用;对控制系统的基本要求。
第二章-控制系统的数学模型:控制系统动态微分方程的列写;用拉普拉斯变换求解线性微分方程的零初态响应与零输入响应;运动模态的概念;传递函数的定义和性质;典型元部件传递函数的求法;控制系统结构图的绘制;梅逊公式在结构图和信号流图中的应用。
第三章-线性系统的时域分析法:系统稳定性的定义与判断法则;劳斯稳定判据;控制系统时域动态性能指标的定义与计算;一阶系统、二阶系统的阶跃响应,典型欠阻尼二阶系统动态性能指标的计算;输入引起的误差的定义,静态误差系数、系统型别、稳态误差的计算;计算典型输入作用下,不同类型系统的稳态误差;扰动引起的误差的定义与计算方法;减小稳态误差的措施。
第四章-线性系统的根轨法:根轨迹的基本概念;根轨迹的模值条件与相角条件;根轨迹绘制的基本法则;广义根轨迹;主导极点与偶极子的概念及其应用。
第五章-线性系统的频域分析法:频率特性的概念及其图示法;频率特性的计算;开环频率特性的绘制;开环系统幅相曲线绘制;开环对数曲线绘制;由最小相角系统的对数幅频渐近曲线求传递函数;奈奎斯特稳定判据;对数稳定判据;稳定裕度;串联超前校正网络的设计;串联迟后校正网络的设计。
第六章-线性离散系统的分析:离散系统的基本概念;信号的采样与保持;差分方程的概念;差分方程的求取与求解;香农采样定理;Z变换定理;离散系统的数学模型;脉冲传递函数的概念与求法;离散系统输出Z变换的求法;离散系统的稳定性与稳态误差;第七章-非线性控制系统分析知识点:非线性控制系统概述;常见非线性特性及其对系统运动的影响;负倒描述函数曲线的绘制;用描述函数法判断非线性系统稳定性;自激振荡的判断、自振参数的确定。
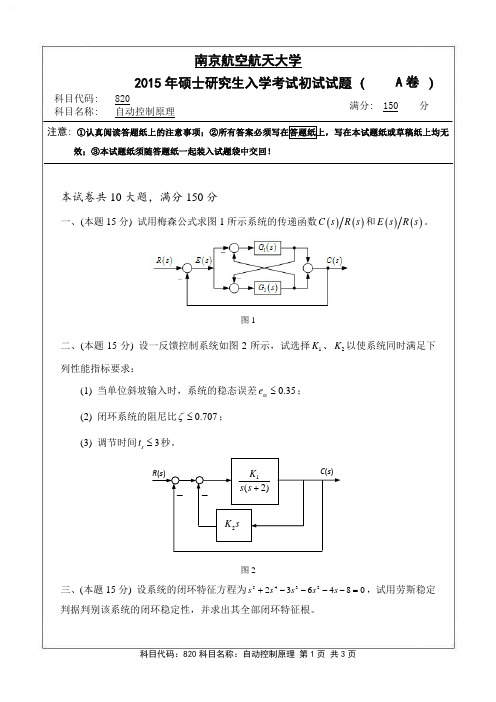
南京航空航天大学2015年硕士研究生入学考试初试试题(A 卷)科目代码: 820科目名称:自动控制原理满分: 150分注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无效;③本试题纸须随答题纸一起装入试题袋中交回!本试卷共10大题,满分150分一、(本题15分) 试用梅森公式求图1所示系统的传递函数()()C s R s 和()()E s R s 。
图1二、(本题15分) 设一反馈控制系统如图2所示,试选择1K 、2K 以使系统同时满足下列性能指标要求:(1) 当单位斜坡输入时,系统的稳态误差0.35ss e ≤; (2) 闭环系统的阻尼比0.707ζ≤;(3) 调节时间3s t ≤秒。
图2三、(本题15分) 设系统的闭环特征方程为0846322345=−−−−+s s s s s ,试用劳斯稳定判据判别该系统的闭环稳定性,并求出其全部闭环特征根。
1(2)K s s +2K sR (s )C (s )四、(本题15分) 设系统的闭环特征方程为2()(1)0s s a K s +++=,)0(>a1.当10a =时,绘制K : 0~∞变化时的系统闭环根轨迹,并求出系统阶跃响应分别为无超调、阻尼振荡时K 的取值范围;2.若使根轨迹只具有一个非零分离点,求出此时a 的取值?并画出此a 值下K : 0~∞变化时的系统闭环根轨迹。
五、(本题15分) 设单位反馈控制系统的开环传递函数为21)(sas s G +=,试确定相角裕度为45°时的a 值。
六、(本题15分) 如图3所示,最小相位系统开环对数幅频渐近特性为)(ωL ′,串联校正装置对数幅频特性渐近特性为)(ωc L 。
1.求未校正系统开环传递函数)(0s G 及串联校正装置)(s G c ;2.在图中画出校正后系统的开环对数幅频渐近特性)(ωL ′′,并求出校正后系统的相位裕度γ′′;3.简要说明这种校正装置的特点。

§自动控制原理参考书目:《自动控制原理(第五版)》胡寿松著,科学出版社2007年§自动控制原理考试大纲:《自动控制原理》考试内容包括: 经典控制理论和现代控制理论两大部分。
第一章自动控制的一般概念知识点:控制系统的一般概念:名词术语、发展史、控制系统的分类、控制系统的组成、典型外作用、对控制系统的基本要求基本要求:掌握反馈控制的基本原理、根据系统工作原理图绘制原理方块图第二章控制的数学模型知识点:控制系统动态微分方程的列写用拉普拉斯变换求解线性微分方程的零初态响应与零输入响应运动模态的概念传递函数的定义和性质、典型元部件传递函数的求法控制系统结构图的绘制、等效变换、梅逊公式在结构图和信号流图中的应用基本要求:1.利用复阻抗建立电路结构图2.熟悉控制系统常用元部件的传递函数3.掌握控制系统结构图的绘制方法及基本等效变换4.用等效变换或梅逊公式求结构图或信号流图的各种传递函数第三章线性系统的时域分析法知识点:控制系统时域动态性能指标的定义与计算、误差的定义与稳态误差的计算系统稳定性的定义与判断法则、系统动态性能分析不作要求的内容: 过阻尼二阶系统性能指标的估算公式非零初始条件下二阶系统的响应过程高阶系统的动态性能估算、赫尔维茨稳定判据动态误差系数、采用串级控制抑制内回路扰动基本要求:1.学会求出一阶系统的阶跃响应、会推导一阶系统动态性能指标的计算公式2.典型欠阻尼二阶系统动态性能指标的计算、性能指标与特征根的关系3.改善二阶系统动态性能指标的方法4.主导极点与偶极子的概念及其应用5.劳斯判据的应用6.静态误差系数、系统型别、稳态误差的计算。
7.扰动引起的误差的定义与计算方法8.减小和消除稳态误差的方法第四章线性系统的根轨法知识点:根轨迹的基本概念、根轨迹的模值条件与相角条件、根轨迹绘制的基本法则广义根轨迹、系统性能的分析不作要求的内容: 根轨迹簇基本要求:1.学会由系统的特征方程求开环增益从零到无穷变化时的根轨迹方程(或开环零点、或开环极点从零到无穷变化)2.理解根轨迹的模值方程与相角方程的几何意义3.掌握零度根轨迹与1800度根轨迹的绘制法则4.学会由根轨迹分析系统稳定性、分析参数的选择对系统运动模态的影响第五章线性系统的频域分析法知识点:频率特性的概念及其图示法、开环频率特性的绘制奈奎斯特稳定判据、稳定裕度不作要求的内容: 对数幅相曲线随机信号的频谱、确定闭环频率特性的图解方法基本要求:1.切记稳定系统的正弦响应的稳态输出是与输入同频率的正弦信号,幅值相角均随频率改变;其稳态误差也是与输入同频率的正弦信号,且幅值相角均改变。


