声纳模拟信号源
- 格式:pdf
- 大小:217.59 KB
- 文档页数:9
一种通用声呐信号源的设计江先军【期刊名称】《现代电子技术》【年(卷),期】2014(000)011【摘要】In the design of active sonar system,in order to make the sonar system working in different environment achieve the best effect, the appropriate sonar signal waveform needs to be designed. A programmable general multi-channel sonar sig-nal source was designed on the basis of DDS chip AD9959 made by ADI. It can generate arbitrary sonar sigal waveform,and has a bright application prospect.%在设计主动声呐系统时,为了使声呐系统能够在不同的工作环境中达到最佳效果,需要设计相应的声呐波形。
采用ADI公司DDS芯片AD9959设计了一种可编程的通用多通道声呐信号源,可生成任意的声呐信号波形,其具有十分重要的应用前景。
【总页数】5页(P68-71,75)【作者】江先军【作者单位】昆明船舶设备研究试验中心,云南昆明 650051【正文语种】中文【中图分类】TN911.7-34【相关文献】1.一种高精度声呐信号源的设计 [J], 杨日杰;杨晓东;赵俊渭2.一种半主动雷达导引头通用模拟信号源设计 [J], 方革非;蒋俊杰3.一种通用半主动雷达导引头信号源的设计 [J], 谢玉龙;周敏;吕雅柔;方革非4.一种校准航空通用仪器的信号源设计与实现 [J], 谢洪森;王玉荣5.一种声呐用多通道相控扫描信号源的设计 [J], 柳赫楠因版权原因,仅展示原文概要,查看原文内容请购买。
实验1 模拟信号源实验一、实验目的1.了解本模块中函数信号产生芯片的技术参数;2.了解本模块在后续实验系统中的作用;3.熟悉本模块产生的几种模拟信号的波形和参数调节方法。
二、实验仪器1.时钟与基带数据发生模块,位号:.时钟与基带数据发生模块,位号:G G2.频率计1 1 台台3.20M 20M 双踪示波器双踪示波器1 1 台台4.小电话单机1 1 部部三、实验原理本模块主要功能是产生频率、幅度连续可调的正弦波、三角波、方波等函数信号(非同步函数信号),另外还提供与系统主时钟同源的2KHZ 2KHZ 正弦波信号(同步正弦波信号)和模拟正弦波信号(同步正弦波信号)和模拟电话接口。
在实验系统中,可利用它定性地观察通信话路的频率特性,同时用做PAM PAM、、PCM PCM、、ADPCM ADPCM、、CVSD CVSD((Δ M M)等实验的音频信号源。
本模块位于底板的左边。
)等实验的音频信号源。
本模块位于底板的左边。
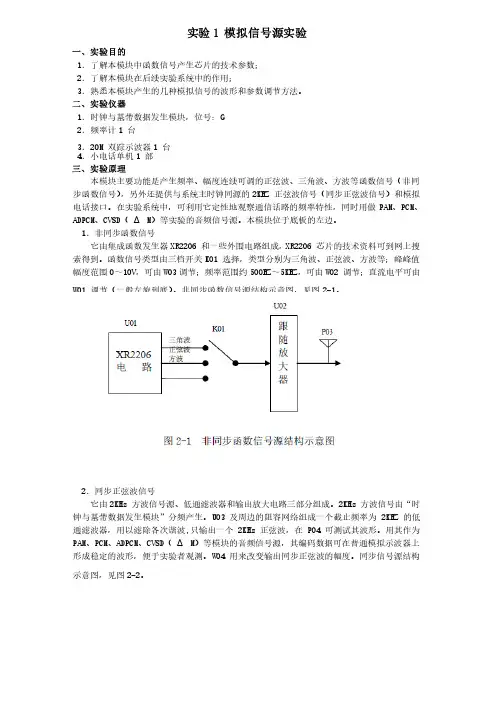
1.非同步函数信号它由集成函数发生器XR2206 XR2206 和一些外围电路组成,和一些外围电路组成,XR2206 XR2206 芯片的技术资料可到网上搜芯片的技术资料可到网上搜索得到。
函数信号类型由三档开关K01 K01 选择,类型分别为三角波、正弦波、方波等;峰峰值选择,类型分别为三角波、正弦波、方波等;峰峰值幅度范围0~10V 10V,可由,可由W03调节;频率范围约500HZ 500HZ~~5KHZ 5KHZ,可由,可由W02 W02 调节;直流电平可由调节;直流电平可由W01 W01 调节(一般左旋到底)调节(一般左旋到底)。
非同步函数信号源结构示意图,见图2-12-1。
2.同步正弦波信号它由2KHz 2KHz 方波信号源、低通滤波器和输出放大电路三部分组成。
方波信号源、低通滤波器和输出放大电路三部分组成。
方波信号源、低通滤波器和输出放大电路三部分组成。
2KHz 2KHz 2KHz 方波信号由“时方波信号由“时钟与基带数据发生模块”分频产生。
基于DDS技术的声纳信号模拟器近年来随着海洋开发和海军技术的发燕尾服,声纳设备的研究越来越受重视。
但是由于水声设备试验通常需要适宜的水声环境,例如消声水池、湖泊或海洋等,因而试验的复杂性和本钱都较高。
为了能在普通实验室环境中模拟目标回波信号,需要针对各种声纳设备的要求设计专用的声纳信号模拟器。
1 声纳信号模拟器的根本原理1.1 波束形成原理简介si(t)=Acos{2πf[t (i-1)dsinθ/c]} (1)其中c为声速。
由于成像声纳是窄带主动声纳,所以I基元与1号基元接收信号间的相位差是φi=2π(i-1)d/λsinθ,其中λ为波长。
因此要想使线阵定向在θ0方向上,只需将第i个基元的信号延时τi(θ0)=2π(i-1)d/λsinθ0即可。
以上是线阵波束形成的根本原理,但这只是远场情况下的近似。
对于近场条件,这样的近似产生的误差会很大。
对于本文中的高频成像声纳,由于全部工作范围均属近场条件,所以波束形成时必须采用聚焦方法。
其根本原理同上,只是对每个基元信号进行的延迟(或移相)不成线性关系,本文对此不做详述。
1.2 声纳信号模拟器原理1.3 传统声纳信号模拟器的缺陷传统的声纳信号模拟器通常采用一个固定的振荡器产生与声纳系统工作频率相同的正弦信号。
将本振信号通过一组多抽头模拟延迟线,然后从延迟线的不同抽头中引出信号作为模拟器的输出。
这种信号模拟器结构存在假设干缺陷和缺乏。
首先,由于采用模拟器件构成抽头延迟线结构,最小可变延迟长度受限。
尤其是考虑到系统硬件规模和本钱,一般延迟线的抽头数目不多,这样就造成延迟时间和理论值之间存在较大误差,从而降低了模拟器的精度。
声纳信号处理及其在海洋监测中的应用一、声纳信号处理基础声纳技术是一种使用声波在水中传播和反射的特性,来获得海洋环境信息和物体探测信息的技术。
声纳信号处理是声纳技术中的核心部分,通过处理声纳采集到的信号,从而实现对其所在水域相应目标的探测、定位、识别与追踪等功能。
声纳信号处理的主要内容包括:接收滤波,信号采样和数字化,功率谱估计,目标探测和目标识别等。
1.接收滤波声纳信号在水中传播过程中会存在受到环境噪声及接收器自身电路噪声的影响,因此首先需要对接收到的信号进行滤波。
该过程可以通过滤波器进行实现,滤波器分为模拟滤波器和数字滤波器,而声纳处理中一般使用数字滤波器。
2.信号采样和数字化声纳信号传输到接收器后,需要先对其进行采样,然后进行数字化处理。
采样频率的选择对声纳信号处理的有效性至关重要,采样频率过低会导致部分信号频率被截断,从而降低声纳信号的质量,采样频率过高则会增加处理器的计算量。
因此,如何选择合适的采样频率是声纳信号处理中的关键因素。
3.功率谱估计声纳信号传递过程中,受到环境噪声及自身电路噪声的影响,将极大影响声纳信号的质量。
因此,需要对处理后的声纳信号能量进行估计,对估计出来的信噪比进行分析和调整,从而提高信号的抗噪声性能。
4.目标探测和目标识别声纳信号处理的最终目标是基于处理后的信号,实现对海洋中的目标进行探测和识别。
声纳目标探测是寻找声纳信号中反射目标的位置,而目标识别是通过分析目标反射信号的特征,对目标进行识别。
二、海洋监测中的声纳技术应用声纳技术应用极其广泛,其中海洋监测是其主要应用领域之一,声纳技术被广泛应用于海洋渔业资源监测,海洋资源勘探、海底构造探测等领域。
1.海洋渔业资源监测海洋中的生物由于体积较大,会在经过水体界面时发生反射,这种反射信号可以被声纳接收,从而实现海洋环境中的生物监测。
声纳技术可以实现对鱼群的位置、密度、数量等信息的监测,对于渔业资源的评估、探测以及预测具有极其重要的意义。
基于DDS技术的声纳信号模拟器
高鹏;桑恩方
【期刊名称】《电子技术应用》
【年(卷),期】2003(29)10
【摘要】提出一种基于DDS技术的数字化通用声纳信号模拟器的实现方案.通过控制DDS器件输出信号的幅度和相位来模拟成像声纳基阵的输出,可以对任意距离和方位上目标回波进行精确的模拟,并可以模拟运动目标的回波信号.讨论了多通道信号模拟器在设计和实现中的具体问题.
【总页数】3页(P64-66)
【作者】高鹏;桑恩方
【作者单位】哈尔滨工程大学水声工程学院,150001;哈尔滨工程大学水声工程学院,150001
【正文语种】中文
【中图分类】TN91
【相关文献】
1.基于DDS技术的雷达中频回波信号模拟器 [J], 石雄
2.一种基于DDS技术的雷达信号模拟器设计 [J], 王铁;张金华
3.基于DDS技术的多普勒信号模拟器设计 [J], 刘琪芳;姚金杰
4.基于DDS技术的雷达信号模拟器设计 [J], 熊娜;
5.基于DDS技术的雷达中频信号模拟器信号源 [J], 刘龙;张振中;戴哲
因版权原因,仅展示原文概要,查看原文内容请购买。
声纳是怎么传输信号的原理
声纳是利用声波进行传输信号的。
声波是一种机械波,是由物体振动产生的一种能量传播方式。
当声源振动时,会产生压力波,这些压力波会沿着介质(如水、空气等)传播,使分子间发生振动,形成机械波,最终到达接收器。
声纳信号是通过发射器将电信号转换成声信号发送到水下,声信号在水中传播到目标物体时,会被反射回来,被接收器接收。
接收器将声波信号转换成电信号,然后通过处理和分析,可以得出目标物体的位置、形状和大小等信息。
声纳信号传输的原理是利用声波在水中的传播特性,包括传播速度、传播方向、折射、反射、衍射等规律。
因此,声纳信号的传输距离和效果受到水体的温度、深度、盐度、流速等因素的影响。
基于数字信号处理技术的声纳信号模拟与处理方法研究声纳信号是一种用于探测、定位和识别水中物体的方法,广泛应用于军事、海洋勘探、水下通信等领域。
而基于数字信号处理技术的声纳信号模拟与处理方法的研究,则着眼于如何利用数字信号处理的理论和技术来模拟和处理声纳信号。
声纳信号模拟是指通过计算机仿真或实际信号发生装置产生声纳信号,并将其用于声纳系统的测试和验证。
声纳信号模拟的目的是在不同条件下模拟真实场景中的声纳信号,以便对声纳系统的性能进行评估。
在基于数字信号处理技术的声纳信号模拟中,我们可以利用数字滤波器、时域仿真和频域调制等方法来生成模拟信号。
数字信号处理技术在声纳信号处理中的应用十分广泛。
其中,最主要的应用包括滤波、谱估计、目标检测和定位等方面。
首先,滤波是声纳信号处理中的重要环节。
滤波可以去除信号中的噪声,增强目标信号的特征,提高信号的质量。
在基于数字信号处理技术的声纳信号滤波中,我们可以根据信号的特点选择适当的滤波器,如低通滤波器、带通滤波器等,以实现信号的滤波处理。
其次,谱估计是声纳信号处理中的另一个重要环节。
谱估计可以通过分析信号在不同频率上的能量分布来揭示信号的频谱特征。
在基于数字信号处理技术的声纳信号谱估计中,我们可以利用傅里叶变换、卡尔曼滤波和功率谱估计等方法来实现信号的谱估计。
目标检测和定位是声纳信号处理中的关键任务。
目标检测可以通过分析声纳信号中的目标回声来确定目标的存在与否,而定位则是通过分析目标回声的到达时延和幅度差异来确定目标的位置。
在基于数字信号处理技术的声纳信号目标检测和定位中,我们可以利用相关性分析、波束形成和空间谱估计等方法来实现目标的检测和定位。
除了滤波、谱估计和目标检测定位等常见的声纳信号处理方法之外,基于数字信号处理技术的声纳信号模拟与处理方法的研究还包括几种新的研究方向。
一方面,自适应滤波是一种针对复杂噪声环境下的声纳信号处理方法。
自适应滤波可以根据实时观测到的环境噪声和目标信号,自动调整滤波器参数以达到最佳的滤波效果。
潜艇声纳系统水声信号模拟
王木树
【期刊名称】《海洋科学进展》
【年(卷),期】1989(000)001
【摘要】声模仪供训练声纳员使用。
在声模仪里水声信号模拟的依据是水声信号检测理论,在对舰船辐射的噪声和背景干扰噪声及潜艇声纳系统检测信号方法分析的基础上,采用电子线路对水声信号进行模拟。
【总页数】8页(P51-58)
【作者】王木树
【作者单位】国家海洋局第一海洋研究所
【正文语种】中文
【中图分类】P76
【相关文献】
1.一种水声目标信号模拟器设计 [J], 吴月东;李雄飞
2.潜艇水声对抗及水声对抗器材的应用 [J], 汪伟;李本昌;罗笛
3.探测来袭的潜艇——2087型主/被动声纳系统 [J], 里查德·斯科特;吴懿鸣
4.一种水声信号模拟装置的设计 [J], 曹占启; 崔滋刚
5.一种基于水声应答器的声纳系统试验方案 [J], 史磊;商尚
因版权原因,仅展示原文概要,查看原文内容请购买。
主动声呐相控信号源的研究与实现作者:王鑫淦尹子源李安阳来源:《声学与电子工程》2021年第03期摘要针对主动声呐相控发射的应用需求,提出一种基于单片FPGA的相控信号源方案。
该相控信号源采用单片FPGA内部构建单个DDS和多个RAM来实现,DDS用来产生正弦信号,RAM用来实现延时输出,且RAM的存储深度只与通道间最大延时量有关。
经Modelsim 功能仿真和实际测试表明,所提相控信号源方案具有相控精度高、资源占用少、控制简单灵活等特点,适合于工程应用。
关键词主动声呐;相控信号源;发射波束形成对于主动声呐发射系统,相控发射能够使发射阵具有一定指向性,从而将能量集中在某一方向上,获得发射指向性增益,用较小的发射功率探测到更远距离的目标。
此外相控发射还能形成多个发射指向性波束,提高主动声呐的探测效率[1]。
相控发射的核心为相控信号源的设计,文献[2-3]采用了DSP和FPGA相结合的方案来实现相控信号源,该方案需要DSP计算波形数据,再传递给FPGA进行相控输出,软硬件较为复杂,并且遇到传输误码时,将导致波形输出异常,影响发射系统正常工作。
文献[4]中提出的相控信号源是对调制以后的SPWM信号进行延时输出控制,因为SPWM信号的采样率一般是基频信号的10倍以上,所以延时输出时所需的数据存储器空间大大增加,硬件配置要求较高。
文献[5]中采用多片DDS集成芯片AD9959来实现相控发射信号源,并通过FPGA对多片AD9959进行同步控制,该方案硬件成本高、控制复杂、并且不适合小型化设计。
本文针对相控信号源的应用需求,提出了一种新颖的基于单片FPGA的相控信号源实现方法。
该方案克服了以往相控信号源的一些弊端,硬件成本低、控制简单、可靠性高。
1相控发射原理主动声呐中,相控发射是基于发射波束形成原理,就是将产生的多路信号经过处理(如延时、相移)后作为一定几何排列的多元基阵的驱动信号,转换成声波后在水介质中自然传播,形成空间指向性的方法[6]。
声纳声场的模拟与测量技术声纳声场是指海洋、湖泊、河流等水体中的声音传播环境。
声纳技术在海洋勘探、水下通信、海洋生物学研究等领域有着广泛的应用。
为了更好地了解和模拟声纳声场,在声学研究中,模拟与测量技术被广泛应用。
声纳声场的模拟技术是指通过合理的模型和实验手段,对声纳系统中的声场进行模拟。
模拟技术可以通过数值模拟、物理模拟等方式进行。
其中,数值模拟主要使用计算机软件进行,通过声场计算算法模拟声纳信号在水中的传播及反射衰减过程。
物理模拟则是利用实验设备,如水池、水槽等,对声场进行真实的模拟。
通过物理模拟,可以观察到声场在水中传播过程中的实际情况,为声纳研究提供真实的实验数据。
测量技术是指通过观测和记录,对声纳声场进行实时监测和测量。
测量技术主要包括声纳测深、声速剖面测量、回声路径测量等。
声纳测深是通过声纳设备对水下地形的测量,可以获取到水深信息,从而为船只的安全导航提供支持。
声速剖面测量是通过声纳设备对声速随深度的变化进行测量。
声速剖面是声纳系统设计的重要参数之一,能够直接影响声纳信号的传播效果。
回声路径测量是指通过声纳设备对声音发射到接收过程中的路径进行测量。
通过测量路径,可以了解到声音在水中的反射、折射等现象,为声纳系统的设计和优化提供数据支持。
在声纳声场的模拟与测量技术中,物理模拟和测量技术被广泛应用于声纳系统的设计和优化。
通过物理模拟和测量技术,可以对声纳信号在水中的传播情况进行研究和分析,从而提高声纳系统的效果和性能。
然而,声纳声场的模拟与测量技术在实际应用中也存在一些问题和挑战。
首先,声纳声场的模拟需要考虑到水体的复杂性,例如水体的湍流、大气压力变化等因素,这对声纳系统的模拟和测量提出了高要求。
其次,声纳声场的实际测量常常受到水体环境的限制,例如水温、盐度、湍流等因素会对声纳信号的传播和接收造成干扰,影响测量结果的准确性。
为了克服这些问题,研究人员需要不断改进模型和测量方法,并结合现代科技手段,如机器学习、数据分析等,来提高声纳声场的模拟与测量效果。
声纳模拟信号源1概述声纳模拟信号源主要是根据目标和声纳接收机的水声信号特性、相对运动特性和水下工作环境噪声特点,实时动态地生成回波模拟信号。
声纳模拟信号源主要由实时操作系统、嵌入式计算机、多通道D/A输出模块、VPC海量连接接插件、ECS机箱以及声纳模拟信号源软件等组成。
声纳模拟信号源基于目前流行且稳定的总线和技术构件,软件采用成熟的虚拟仪器软件开发平台构建,保证系统具有的先进性、可靠性以及可扩充性。
2技术指标2.1功能2.1.1目标机动仿真z目标运动方式:静止和运动目标;z运动速度:目标运动轨迹和速度可动态设置;2.1.2目标信号类型z被动方式目标船辐射平稳连续谱噪声信号;z主动方式目标船回波信号;z环境背景噪声;z在XX工作频段内频率连续可变的连续正弦波;z各路同相正弦波、噪声;2.1.3基阵信号模拟z目标回波与背景噪声模拟:舰船辐射噪声(宽带噪声、线谱、包迹谱等)、XX主动工作方式接收的回波信号;z阵元信号模拟:精确模拟给定基阵各独立阵元的多路时延;2.2性能指标z通道数:64-ch同步输出(可扩展);z多路输出时延精度:≤0.2μs(同步精度);z多路输出幅度不一致性:≤5%(RMS)z输出电压分辨率:≤0.1mV;z输出电压精度:≤1mV;z输出信号幅度(单峰值):1mV~5V;z输出信号频率:10Hz~80kHz;z信噪比动态范围:-35dB~20dB(连续可变);z通信接口:100M/1000M以太网接口;z输出信号形式:单频、调频和噪声信号,可根据XX主动发射的信号形式,模拟目标回波;2.3其它z声纳模拟信号输出接口:VPC海量连接接插件;z显示控制接口:预留RS-232、USB、键盘、鼠标、显示器接口;z存储机箱:ECS机箱;z重量:约20kg;z外形尺寸:约6U高,19”宽,500mm深。
3系统方案3.1系统原理声纳模拟信号源主要用于舰船声纳设备的测试信号产生任务,与被试船载声纳接口示意图如图 1所示。
成像声纳信号源与信号采集系统设计实现的开题报告一、选题背景成像声纳是指利用声波在水中的传播特性,通过声纳信号来探测水中的目标物体,并生成目标物体的声纳影像。
在海洋勘探、水下探测、水下机器人等领域有着广泛的应用。
而成像声纳信号源与信号采集系统则是成像声纳的核心部件之一,它的稳定性和精度直接影响到成像质量。
二、研究目的本文旨在研究成像声纳信号源与信号采集系统的设计与实现方法,通过对成像声纳信号源和信号采集系统的深入研究,探索其在成像声纳系统中的重要作用,以及如何有效地设计和实现高性能的成像声纳信号源和信号采集系统。
三、研究内容本文主要分为以下三个部分:1.成像声纳信号源设计:介绍了成像声纳信号源的构成和工作原理,详细分析了不同信号源的优缺点,并根据成像需求将成像声纳信号源进行优化和设计。
2.成像声纳信号采集系统设计:介绍了成像声纳信号采集系统的原理和设计方法,包括信号采集器的选择、采样率、采样精度等,以及如何提高成像信号的质量。
3.系统实现与测试:详细描述了成像声纳信号源和信号采集系统的硬件实现过程,并进行了系统测试和分析。
四、研究意义本文研究成像声纳信号源与信号采集系统的设计和实现方法,对于提高成像声纳系统在海洋勘探、水下探测、水下机器人等领域的应用效果具有极大的意义。
同时,本文的研究方法和技术手段也可以为其他相关领域的研究提供借鉴和参考。
五、研究方法本文采用理论研究和实验研究相结合的方式进行,其中理论分析主要通过文献资料的收集和整理,对成像声纳信号源和信号采集系统的理论进行分析和研究,以确定设计方案。
实验研究主要通过硬件实现和实验测试等方式进行,验证系统性能和实现效果。
六、预期结果通过对成像声纳信号源和信号采集系统的设计和实现,预期可以满足成像声纳系统在实际应用中的成像需求,实现高质量的成像信号,并具有稳定性和可靠性,同时对成像声纳系统的进一步研究和应用起到积极的推动作用。
干涉合成孔径声纳的信号源系统设计洪琳琅;刘海华;袁利;陈军波【摘要】In order to achieve Interference synthetic aperture sonar systemto the special requirements of the signal source, this paper presents a FPGA-based SOPC technology implementations, the signal provided to the transmitter analog signal on the one hand, returned to the echo signal acquisition system clock and sync signal in order to ensure consistency of the signal system time, as well as to the receiver signal to achieve time-varying gain compensation for attenuation of the echo signal; the other hand, also real-time collection and transmission system in the underwater sonar motion attitude, depth, pressure and other information; through lake test and sea trials, the signal source system to complete the analog signal and digital signal indicators test , satisfy the design requirements.%为达到干涉合成孔径声纳系统对信号源的特殊要求,提出了一种基于SOPC技术的FPGA实现方法,该信号源一方面提供给发射机模拟信号,还给回波信号采集系统提供时钟和同步信号以保证信号系统时间一致性,同时还给接收机的时变增益信号实现对回波信号衰减的补偿;另一方面还实时采集并传输声纳系统在水下的运动姿态、深度、压力等信息;经过湖试和海试,该信号源系统完成了模拟信号和数字信号各项指标的测试,满足设计要求.【期刊名称】《计算机测量与控制》【年(卷),期】2012(020)001【总页数】4页(P212-215)【关键词】干涉合成孔径声纳;SOPC;FPGA【作者】洪琳琅;刘海华;袁利;陈军波【作者单位】中南民族大学生物医学工程学院,湖北武汉430074;中南民族大学生物医学工程学院,湖北武汉430074;海军工程大学电子工程学院,湖北武汉430033;中南民族大学生物医学工程学院,湖北武汉430074;中南民族大学生物医学工程学院,湖北武汉430074【正文语种】中文【中图分类】TN790 引言干涉合成孔径声纳系统(InSAS)用于水下目标的探测和识别,由水上控制处理机部分和水下拖体两大部分组成,其中水下拖体包含:信号源、采集卡、接收机、发射机和传感器等。
专利名称:一种声纳信号模拟器延时控制的声纳信号模拟方法及装置
专利类型:发明专利
发明人:覃德卿,陶林伟,李亚宇
申请号:CN202011105339.X
申请日:20201015
公开号:CN112187278A
公开日:
20210105
专利内容由知识产权出版社提供
摘要:本发明涉及一种声纳信号模拟器延时控制的声纳信号模拟方法及装置,通过FPGA使用DDS 的方式生成信号,充分的利用了FPGA上的运算资源,ARM只需要根据声纳信号模型计算频率控制字和相位控制字交由FPGA完成DDS。
本发明将信号时延模块与串并转换模块结合,通过调整可变长度移位寄存器长度以调整时延大小,同时使用梯级组合型移位寄存器有效的降低了移位寄存器触发链组合逻辑所需要的资源。
本发明通过FPGA的并行处理能力同步的产生多路不同时延的并行信号,避免了采用循环读取地址的方式导致系统效率降低。
申请人:西北工业大学
地址:710072 陕西省西安市友谊西路127号
国籍:CN
代理机构:西北工业大学专利中心
代理人:王鲜凯
更多信息请下载全文后查看。
一种声纳测试信号源
王寿贤;彭建民
【期刊名称】《声学与电子工程》
【年(卷),期】1990(000)001
【摘要】本文给出一种声纳测试信号源.此信号源能产生多种频率的连续单频信号、调频脉冲、单频脉冲和单频-调频脉冲,信号的频率、幅度与信号形式均可数字控制.频率变化每步1.5Hz,幅度变化每步1dB,频率稳定度达到10-5/℃的量级.线路简单、稳定,经环境试验证明,满足使用要求.
【总页数】3页(P31-33)
【作者】王寿贤;彭建民
【作者单位】不详;不详
【正文语种】中文
【中图分类】U6
【相关文献】
1.一种基于33250A型信号源的数字超声探伤仪水平线性误差测试方法 [J], 陈沈理;何卓斌;杨德俊
2.一种干涉合成孔径声纳信号源系统的软件设计 [J], 冀志轩
3.一种声纳接收机测试用信号源的设计 [J], 朱善林;李芳
4.一种零值测试基带信号源设计 [J], 徐茜;宫海波
5.一种舰壳声纳通用系泊测试系统的设计 [J], 杨丽;蔡永招;孙权
因版权原因,仅展示原文概要,查看原文内容请购买。
声纳模拟信号源1概述声纳模拟信号源主要是根据目标和声纳接收机的水声信号特性、相对运动特性和水下工作环境噪声特点,实时动态地生成回波模拟信号。
声纳模拟信号源主要由实时操作系统、嵌入式计算机、多通道D/A输出模块、VPC海量连接接插件、ECS机箱以及声纳模拟信号源软件等组成。
声纳模拟信号源基于目前流行且稳定的总线和技术构件,软件采用成熟的虚拟仪器软件开发平台构建,保证系统具有的先进性、可靠性以及可扩充性。
2技术指标2.1功能2.1.1目标机动仿真z目标运动方式:静止和运动目标;z运动速度:目标运动轨迹和速度可动态设置;2.1.2目标信号类型z被动方式目标船辐射平稳连续谱噪声信号;z主动方式目标船回波信号;z环境背景噪声;z在XX工作频段内频率连续可变的连续正弦波;z各路同相正弦波、噪声;2.1.3基阵信号模拟z目标回波与背景噪声模拟:舰船辐射噪声(宽带噪声、线谱、包迹谱等)、XX主动工作方式接收的回波信号;z阵元信号模拟:精确模拟给定基阵各独立阵元的多路时延;2.2性能指标z通道数:64-ch同步输出(可扩展);z多路输出时延精度:≤0.2μs(同步精度);z多路输出幅度不一致性:≤5%(RMS)z输出电压分辨率:≤0.1mV;z输出电压精度:≤1mV;z输出信号幅度(单峰值):1mV~5V;z输出信号频率:10Hz~80kHz;z信噪比动态范围:-35dB~20dB(连续可变);z通信接口:100M/1000M以太网接口;z输出信号形式:单频、调频和噪声信号,可根据XX主动发射的信号形式,模拟目标回波;2.3其它z声纳模拟信号输出接口:VPC海量连接接插件;z显示控制接口:预留RS-232、USB、键盘、鼠标、显示器接口;z存储机箱:ECS机箱;z重量:约20kg;z外形尺寸:约6U高,19”宽,500mm深。
3系统方案3.1系统原理声纳模拟信号源主要用于舰船声纳设备的测试信号产生任务,与被试船载声纳接口示意图如图 1所示。
图 1 声纳模拟信号源外部接口关系图声纳模拟信号源主要完成目标和背景信号生成、阵元时延叠加以及信号同步产生的任务。
为了完成此任务,声纳模拟信号源一方面需要具有高速运算处理单元、高速通信接口以及多路目标模型数据生成功能;另一方面还需要配置多个高速D/A通道,进行数模转换;第三,系统还必须具有一定的实时数据处理的能力,满足系统实时处理需求。
根据声纳模拟信号源的功能和性能要求,系统组成原理如图2所示。
图 2 声纳模拟信号源组成原理由测试管理系统输出的工作模式、目标参数、背景参数由以太网络送到实时处理器中,经目标信号生成、背景噪声生成、阵元时延生成以及数据组织后进行输出。
D/A数据直接送到多通道DAC上产生模拟输出信号。
多通道DAC模块具有24-bit的精度,由于内部输出数据具有8倍内插,因此实际输入数据速率不需要大于f h/0.45,对于当前最高输出87kHz信号来说,输入数据率不需要大于192kHz。
由于D/A通道具有24-bit的精度,实际小信号情况下用11-bit产生信号也基本够用了,此时D/A的另外13-bit可以用于进行信号幅度的控制,即dB 78)2lg(2013≈满足了系统1mV~5V 信号范围(74dB )控制需要,达到了设计要求。
3.2 系统组成声纳模拟信号源主要硬件由嵌入式控制器、高速通信接口模块、多通道D/A 输出模块以及声纳模拟信号源软件等组成。
系统硬件组成框图如图 3所示。
64-ch 声纳模拟信号图 3 系统硬件组成框图如图所示,嵌入式控制器与测试管理计算机采用100M 或1000M 以太网络进行数据通信,嵌入式控制器与多通道DAC 采用高速通信接口进行通信,输出的声纳模拟信号通过VPC 海量连接器输出。
考虑到运输和使用方便性,系统配置方便搬运、存储的ECS 机箱,箱内可充入氮气,便于舰船、海边长期存储。
3.3 声纳信号数学模型3.3.1 声纳系统参数声纳系统模型建立主要依据以下两个基本声纳方程:SL-2TL+TS+GS+GT-NL=DT (主动声纳方程)SL-NL-TL+GS+GT=DT (被动声纳方程)式中出现的参数可分为由声纳系统决定的参数、由目标决定的参数和由环境决定的参数三类:a) 由声纳系统决定的参数SL :发射时的声压;GS:声纳系统的空间增益;GT:声纳系统的时间增益;DT:检测阈。
b) 由目标决定的参数SL:辐射噪声源的指标声压级(又称为声源强度);TS:目标强度,表示目标截获声能并将之重新辐射的能力。
c) 由环境决定的参数:NL:背景噪声;TL:传播损失,表示声能在水声信道中传播的能量损失。
声纳模拟系统的目的就是根据目标和声纳接收机的水声信号特性、相对运动特性和水下工作环境噪声特点,实时动态地生成回波模拟信号。
因此分析声纳方程的各项参数对于研究声纳的信号回波模拟信号处理方法非常重要。
3.3.2声纳模拟系统建模通过以上的分析,可以建立声纳模拟系统信号处理数学模型:z具有单频、线性调频信号的模拟功能;z信道是单途径、线性的信道;z目标为点目标,目标辐射噪声为平稳高斯噪声;z干扰背景场为均匀各向同性高斯噪声场;z回波模型能够满足舰船和接收机相对运动所需的多普勒频移外信息。
接收阵元信号模拟主要根据接收阵元的空间布放位置,在环境参数确定的情况下,由信号处理计算机系统实现目标模拟信号的生成、空间噪声的生成以及上述信号的合成。
声纳模拟系统建模主要应根据系统需求进行,特别应强调模拟对象和使用目的。
因此模型设计中应根据对信号特征的分析进行简化处理,否则很难满足系统地主要功能和性能指标要求,难以满足系统进行动态数据处理的实时性要求。
4软件方案4.1软件开发平台软件开发平台的选择需要考虑到以下几个方面:首先,与大系统软件的兼容性问题;其次,本系统在进行特定情况下的声信号模拟时,对系统软件的实时性有一定的要求。
第三,为了便于系统升级和扩充,软件设计和编程难度也应同时作出考虑。
随着计算机技术、仿真技术的发展,各种新兴仿真技术也不断涌现,其中最受瞩目的就是基于图形化编程的LabVIEW Real Time开发平台。
LabVIEW Real Time图形编程工具由两部分构成,亦即开发系统和Real Time引擎。
Real Time开发系统的功能是编制和调试LabVIEW RealTime代码,然后将程序下载到RealTime系列硬件上的Real Time CPU,以及提供用户界面。
可见Real Time实时系统是在主机PC下运行的应用软件,Real Time引擎是在Real Time CPU内运行和执行嵌入的LabVIEW Real Time程序。
实时引擎实际上是一个32位内核的实时操作系统,具有与开发系统通信服务等功能。
Real Time引擎运行LabVIEW Real Time的代码,提供确定性的实时特性。
由于Real Time引擎不在主机PC运行,而在Real Time系列硬件上运行,对实时特性调谐,减少瓶颈。
Real Time引擎是在实时操作系统下运行,保证调度程序和其它操作系统服务粘附到实时操作上。
Real Time引擎是多线程的,较高优先级的线程一定比低优先级的线程先执行。
使用者无需了解内核的详细运行,实时操作系统管理全部实时细节。
这种屏蔽作用保证在实时操作系统更新时,用户不必更改代码。
有了LabVIEW Real Time之后,构建实时测控应用变得很容易和方便。
对熟悉LabVIEW的使用者来说,先在LabVIEW Real Time软件开发环境下编写应用程序,然后将代码下载到Real Time系列硬件上的Real Time处理器内。
这样,使用者就备有可靠的独立运行的处理器全力以赴地执行硬实时控制的要求,而其它对时间没有严格要求的用户界面临视,数据收集和有其它功能留给主机PC去处理。
因为LabVIEW Real Time代码在智能的Real Time系列数据采集卡运行,即使主机PC崩溃,控制回路应用程序仍然工作。
对于熟悉LabVIEW编程和传统数据采集插卡的使用者,由于LabVIEW Real Time和Real Time系列硬件采用同样的应用程序接口,使用者可利用从前的编程经验而不必深入了解实时技术来构建硬实时应用。
由LabVIEW Real Time开发实时应用程序可用于大型测控系统的分布式结构,在分布式结构中主机PC运用标准的LabVIEW主程序为用户提供界面,对时间要求不严格的控制硬件可接入分布网络中,对时间要求严格的Real Time系列硬件执行LabVIEW Real Time程序。
标准的LabVIEW主程序软件与嵌入的LabVIEW Real Time程序相互通信和分享Real Time硬件的板上存储器,在网络上运行TCP/IP协调或调用虚拟仪器(VI)服务器,执行分布式硬实时测控作业。
LabVIEW Real Time的主要特性包括:z快速开发LabVIEW Real Time模块扩展了LabVIEW图形化开发环境的应用范围,用户可以使用500多种分析和控制例程来创建高级的确定性应用程序。
z分布式部署可以部署实时应用程序到联网目标硬件上,并通过上千个通道以及鲁棒性通信接口在各个目标对象和大型监控系统之间进行数据共享。
z I/O集成使用现成可用、功能齐全的硬件驱动程序将各种I/O,如模拟I/O、数字I/O、运动控制I/O、视觉I/O与高精度仪器一起集成到实时应用程序中。
z其它特性LabVIEW Real Time的其它特性包括:嵌入式和实时控制的的图形化开发环境,用于PID和模糊逻辑控制的内置式功能库,与RT系列硬件无缝集成,提供真正的实时性能,生成独立应用程序,并将程序应用在RT系列硬件上。
4.2应用软件4.2.1系统主控软件模块系统主控程序主要完成系统任务调度管理、时间分配、命令参数配置、初始化等功能。
该部分程序要求具有较高的效率,可以将多个任务进行时间分配、并行化任务(多核CPU分配),同时进行优先级设定。
4.2.2实时网通信管理软件模块实时网通信管理软件模块主要完成实时网卡配置(中断、DMA设置)、数据接收和发送、接收数据组织、发送数据组织、网络命令参数的解析等功能。
4.2.3信号生成软件模块信号生成软件模块主要完成接收的声纳目标信号、背景信号的生成,信号的叠加、输出通道修正、数据组织和分配等功能。
由于接收数据量较大,因此数据处理软件的效率要求较高。
信号生成软件主要需要考虑以下一些功能和算法:z海洋传播信道仿真功能:由于海水介质的不均匀性,导致了声在海水中的传播一般不会按照直线进行传播,而会发生弯曲现象。
根据介质影响、传播条件和边界影响等因素,仿真海洋传播信道,生成基阵输出信号。