基于路标的智能车辆定位_钱钧
- 格式:pdf
- 大小:480.54 KB
- 文档页数:5

探测车基于可视路标的全局定位
庄惠敏;曹其新
【期刊名称】《上海交通大学学报》
【年(卷),期】2009(0)6
【摘要】基于全景视觉的定位系统采用可视人工路标作为定位依据.为避免复杂的路标制作过程,提高导航的灵活性和方便性,采用简单的彩色立方体作为定位路标.同时,为避免路标的误识别导致误定位,提出了利用路标组特征匹配的方法,提取路标组中具有尺度不变性和旋转不变性的路标组特征进行路标识别,且利用路标组里的路标信息通过3点定位原理得到探测车当前的位置,结合人机交互的路径规划判断定位的可信度,提高定位的正确度,保证车子的安全性.通过软件仿真和现场实验,证明了该视觉定位系统可避免以往基于可视路标定位存在的不稳定性,大幅度减少了定位错误概率.
【总页数】4页(P871-874)
【关键词】全景视觉;定位系统;路标识别;定位算法
【作者】庄惠敏;曹其新
【作者单位】上海交通大学机器人研究所
【正文语种】中文
【中图分类】TP242.62
【相关文献】
1.我国首辆消防执勤战备保障车装备部队/可视生命探测仪装备成都消防/法国研制出一种新型的机场消防车 [J],
2.基于人工路标的易部署室内机器人全局定位系统 [J], 廖志涵;吴锋
3.基于全时空增强现实定位与可视化技术的排管埋深探测技术 [J], 龚波涛;肖斌;齐秉柱
4.基于地面快速鲁棒特征的智能车全局定位方法 [J], 胡兵;杨明;郭林栋;王春香;王冰
因版权原因,仅展示原文概要,查看原文内容请购买。

汽车标志定位技术研究
王华
【期刊名称】《电子元器件应用》
【年(卷),期】2009(11)1
【摘要】汽车标志定位技术是识别汽车标志的基础和前提,也是汽车识别系统的重点和难点.文章针对汽车标志的固有特点,分析了汽车排气扇及车标的投影像素分布特征,提出了一种有效的汽车标志定位方法.该方法具有较好的定位效果,尤其是对于背景与车标的差异较小,而且存在背景干扰的情形,其标识定位效果更为显著.
【总页数】4页(P67-69,72)
【作者】王华
【作者单位】重庆科创职业学院计算机学院,重庆,402160
【正文语种】中文
【中图分类】U4
【相关文献】
MOST并行可控式光纤定位系统定位单元及其控制技术研究 [J], 李为民;胡红专;俞巧云;陈鸿强;邓伟平;翟超;邢晓正
2.跨海大桥定位桩安装新工艺——GPS定位桩导向架技术研究介绍 [J], 殷婷婷;严辉煌
3.动力定位船铺缆定位关键技术研究 [J], 赵永春
4.定位科研导航人生——记武汉大学卫星导航定位技术研究中心牛小骥团队 [J], 刘昊林
5.华阳:双模精准定位深化导航服务——专访国家卫星定位系统工程技术研究中心宋伟伟博士 [J], 罗葵
因版权原因,仅展示原文概要,查看原文内容请购买。
研究城市中智能车辆根据混合地图定位的方法作者:刘咏晨金日鑫来源:《中国科技纵横》2016年第15期【摘要】本文根据混合地图的匹配技术,研究了城市中的智能车辆的定位方法。
从而降低了传统定位方法造成的定位方面的误差。
本位将研究的根据混合地图进行智能车辆的定位方法主要包括两方面的内容:如何创建混合地图、智能车辆根据混合地图定位的相关问题。
在研究创建混合地图的方法中,利用了一种刚提出的混合的有关地图方面的框架。
这种框架可以讲城市划分为两种相对的区域,即强约束区和弱约束区。
位于拓扑地的节点就是弱约束区,把强约束区做为与相应节点连接的边。
研究智能车辆如何根据混合地图定位的问题时,根据环境条件的不同,而确定车辆运动的方位。
当车辆处于强约束区时,车辆根究多种特征来确定其可通行的区域。
当车辆处于弱约束区时,则车辆必须遵守一种被成为马尔可夫的定位方法。
【关键词】智能车辆混合地图同步定位与地图创建1 概述汽车做为多种交通工具的一种,为人们的出行带来了巨大的方便。
但同是交通事故越来越频繁的出现在人们的日常生活中。
不仅给人们造成了财产方面的损失,更严重威胁着人们的生命安全。
因而,智能车辆是汽车发展的一种必然趋势。
智能车辆包含了计算机科学、传感技术、控制技术等多种技术。
它们可以较快的感应车辆外部的各种情况以及车辆自己的状态。
除此之外,它们还可以根据外界环境自动调节。
这些智能车辆有效的提高了汽车本身的安全系数。
智能车辆的定位系统包括利用传感器处理数据,规划路径、自身定位等多部分组成。
其中自身定位是指车辆通过其自身的组成来确定它所处的具体位置。
根据参考坐标系的不同。
智能车辆可以进行绝对定位和相对定位。
绝对定位与相对定位的参考坐标系不同。
绝对定位是以地心做为坐标系,而相对定位的坐标系则不同。
绝对定位确定车辆在地球表面的位置,而相对定位则确定车辆与目标之间的位置关系。
综上所述,智能车辆在行驶过程中可以确定自身的具体位置以及车辆自身与各目标之间的相对位置。

简单场景中基于计算机视觉的智能小车设计
张萍
【期刊名称】《物联网技术》
【年(卷),期】2024(14)1
【摘要】基于计算机视觉技术设计可在简单场景中自动行驶的智能小车,模拟真实场景,对保持行进路线、识别交通标志、控制小车运行状态等关键技术进行研究。
给出主要硬件选型参考,使用图像处理技术和OpenCV开发库实现行进路线保持,使用深度学习框架识别交通标志,对小车运动原理进行分析,使用PID算法控制小车状态,验证了关键技术的可行性。
【总页数】4页(P122-124)
【作者】张萍
【作者单位】广东工贸职业技术学院计算机与信息工程系物联网应用专业
【正文语种】中文
【中图分类】TP393.0
【相关文献】
1.基于计算机视觉的智能小车路径规划
2.基于计算机视觉的虚实场景合成方法研究与应用
3.基于51duino智能小车的三维场景重建
4.基于计算机视觉的复杂场景车牌识别算法
5.基于深度学习的计算机视觉技术在交通场景中的应用
因版权原因,仅展示原文概要,查看原文内容请购买。

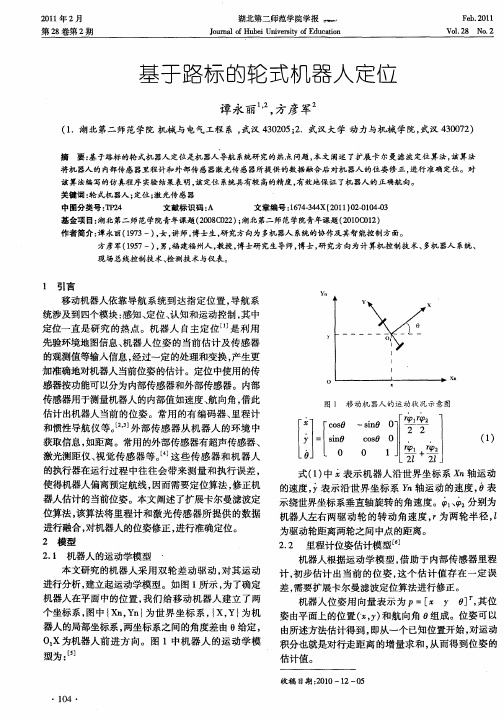
基于路标的智能车辆定位
钱钧;杨汝清;王晨;周启龙;杨明
【期刊名称】《上海交通大学学报》
【年(卷),期】2007(41)6
【摘要】为解决智能车辆在城市环境中的定位问题,使用激光雷达检测和提取圆柱形路标的中心位置,并与已知地图进行数据关联;以CyberC3智能车辆为移动平台,建立了车辆运动模型和传感器测量模型,使用扩展卡尔曼滤波算法对激光雷达和编码器数据进行融合,计算车辆的全局位姿.实验结果证明该方法可以获得较高的定位精度,解决了车辆自主导航的关键问题,并可推广应用到基于自然特征的全局定位.【总页数】5页(P894-898)
【关键词】智能车辆;定位;激光雷达;路标;扩展卡尔曼滤波器
【作者】钱钧;杨汝清;王晨;周启龙;杨明
【作者单位】上海交通大学机器人研究所;上海交通大学自动化系
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.基于插补-灰色理论的智能化农业车辆\r定位预测系统设计 [J], 魏建胜;田光兆;刘宇峰
2.基于智能定位技术的无人物流车辆智能监控系统设计 [J], 谭永丽
3.基于协同交互与激光测距的井下智能车辆定位系统 [J], 王蓝仪;刘欣雨;李爱
4.基于多传感信息融合的智能车辆定位方法 [J], 赵一兵;刘昌华;郑震;郭烈;马振强;韩治中
5.基于协同交互与激光测距的井下智能车辆定位系统 [J], 王蓝仪;刘欣雨;李爱因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于高精度地图的路径跟踪方法阳钧;鲍泓;梁军;马楠【摘要】斯坦利方法对扰动的鲁棒性较差,且易在路径跟踪时产生较大偏差.为此,提出一种改进的斯坦利路径跟踪方法.利用自动驾驶车的惯性导航系统收集路网数据,建立一张高精度的道路地图.使用A*算法进行路径规划,得到有效的路径信息.根据车速与注视点之间的对数关系,计算出前视点的位置,并将前视点作为斯坦利路径跟踪的目标点.实验结果表明,与斯坦利方法相比,该方法路径跟踪的横向偏差降低了20%.【期刊名称】《计算机工程》【年(卷),期】2018(044)007【总页数】6页(P8-13)【关键词】斯坦利方法;路径跟踪;高精度地图;自动驾驶;路径规划【作者】阳钧;鲍泓;梁军;马楠【作者单位】北京联合大学北京信息服务工程重点实验室,北京 100101;北京联合大学北京信息服务工程重点实验室,北京 100101;北京联合大学北京信息服务工程重点实验室,北京 100101;北京联合大学北京信息服务工程重点实验室,北京100101【正文语种】中文【中图分类】TP3910 概述自动驾驶车具有安全性高、可及性广、道路行驶效率高的特点[1],其对环境产生了积极的影响。
近年来,因为科技领域计算能力与传感技术水平的提高,使自动驾驶车的研究取得了较多成果。
最近的相关竞赛,如美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)举办的城市挑战赛[2],加速了自动驾驶车的独立设计并拓宽了其发展领域。
自动驾驶车主要提供地图、定位、感知、导航和控制功能。
地图场景表示的中心元素是车道的路线,地图场景建模的主要目标是在保持一定精度的情况下有效地表示道路几何形状,同时保持一定的精确度[3]。
目前,有多种方法可以获得准确的道路几何数据。
例如,在传统地理信息系统中,从飞机上获得高分辨率航空相机图像,通过图像处理装置[4]提取道路几何图形。