运动控制技术及解决方案Beckhoff
- 格式:pdf
- 大小:4.54 MB
- 文档页数:43

(1条消息)倍福beckhoff运动控制相关功能块,百晓生知识处理库发布由百晓生自创知识处理库整理清洗与发布,顶级知识整理加工生产python功能库。
转载请注明出处https:///gkbxs/article/details/116654106FB_MC_FeedTableMC_ GearInMultiMasterMC_Aborting 立即打断前动作,执行后动作MC_AxisParaMC_BlendingHigh 以较高的速度达到前动作的目标位置,然后执行后动作。
MC_BlendingLow 以较低的速度达到前动作的目标位置,然后执行后动作。
MC_BlendingNext 以后动作的速度达到前动作的目标位置,然后执行后动作。
MC_BlendingPrevious 以前动作的速度达到前动作的目标位置,然后执行后动作。
MC_BufferModeMC_Buffered 等前动作执行完成,停稳后再执行后动作。
MC_CAMACTIVATION_ASSOONASPOSSIBLE:考虑加速度和冲击在允许范围MC_CAMACTIVATION_ATMASTERAXISPOS:主轴绝对位置MC_CAMACTIVATION_ATMASTERCAMPOS:凸轮表的主轴位置,即主轴模态MC_CAMACTIVATION_INSTANTANEOUS :不考虑加速度是否在允许范围MC_CAMACTIVATION_NEXTCYCLE:下一凸轮表周期生效MC_CAM_RefMC_CamAddMC_CamExchange 添加、移除和更换凸轮表MC_CamExchange 添加、移除和更换凸轮表。
也可以使用MC_CamIn_VMC_CamIn 和 MC_CamIn_V 种电子凸轮耦合功能块:MC_CamIn 的接口和功能比较简单,就是固定个凸轮表MC_CamIn 耦合的,就不能切换凸轮表。
MC_CamInExtMC_CamIn_V 是MC_CamIn 的升级版,功能更强大,支持多个凸轮表的迭加和切换。

Beckhoff TwinCAT 3作为旋转分度系统的控制软件
德国倍福自动化有限公司
【期刊名称】《自动化博览》
【年(卷),期】2015(0)11
【摘要】IMA公司在Automatica 2014展会上展出的CGM旋转分度台采用基于PC的运动控制系统,结构特别紧凑和多样化总部位于德国安倍格的IMA Automation公司借助一个全新的紧凑型旋转分度系统(最多能够实行8个装配步骤)满足装配应用中不断变化的需求。
系统具有更高的生产灵活性,同时提高操作效率和能效。
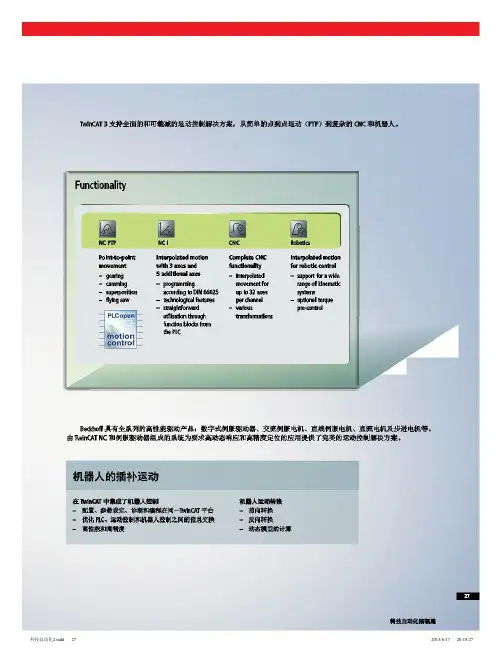
Beckhoff基于PC的控制技术和TwinCAT
【总页数】2页(P100-101)
【作者】德国倍福自动化有限公司
【作者单位】德国倍福自动化有限公司
【正文语种】中文
【相关文献】
1.Beckhoff TwinCAT 3作为旋转分度系统的控制软件 [J], ;
2.Beckhoff TwinCAT机器人运动学功能库和伺服技术提高了食品包装行业的效率[J], ;
3.倍福:TwinCAT 3楼宇楼宇控制软件 [J], ;
4.倍福推出新一代楼宇控制软件TwinCAT3 [J], 无;
5.倍福发布新一代楼宇控制软件:TwinCAT 3楼宇自动化 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
twincat2教程案例
Twincat 2是Beckhoff公司开发的一款用于工业自动化控制系统的软件平台。
它结合了PLC、运动控制、HMI、数据采集等功能,为工业自动化系统提供了全面的解决方案。
下面我将从不同的角度为你介绍一些Twincat 2的教程案例。
1. PLC编程,Twincat 2提供了丰富的PLC编程功能,可以实现逻辑控制、数据处理、通讯等功能。
在学习Twincat 2的PLC编程时,可以通过案例来深入理解其编程语言和逻辑结构,例如实现一个简单的流水线控制系统、温度控制系统等。
2. 运动控制,Twincat 2支持多轴运动控制,可以实现各种复杂的运动控制应用,如机械臂、输送带、注塑机等。
可以通过案例学习如何配置运动控制系统、编写运动控制程序、调试运动轴等。
3. HMI设计,Twincat 2提供了丰富的HMI设计功能,可以创建直观友好的人机界面。
通过案例学习如何设计HMI界面、实现数据显示、操作按钮、趋势图等功能。
4. 数据采集与分析,Twincat 2支持实时数据采集和分析,可
以帮助用户监控生产过程、分析生产数据。
可以通过案例学习如何配置数据采集设备、编写数据分析程序、实现报表生成等功能。
通过以上不同方面的案例学习,可以全面了解Twincat 2的功能和应用,提升工程师在工业自动化领域的技能和应用水平。
希望以上介绍对你有所帮助。


BECKHOFF CX运动控制系统在工业CT机TZ1001中的应用胡国清(武汉华中自控技术发展有限公司,湖北武汉430077)内容提要:应用BECKHOFF CX1020运动控制系统实现TZ1001工业CT专机的主要控制功能,如闭环控制、NC程序运行、HMI监控和双向位置精度补偿等。
关键词:CX运动控制系统;工业CT机;双向精度补偿中图分类号TP2 文献标识码 BTZ1001高能X射线工业DR/CT快速检测专机由两个同步运行的加速器X1和探测器X2运行轴、分度B轴、探测微动调整W轴和工件定位移动X3轴构成,其中X1、X2、B、W 均为伺服轴,X1、X2轴行程10500mm,X3轴行程7500mm,对同步定位、重复定位、分度等精度均有较高要求。
1.系统配置选用具有较高性能CPU的嵌入式PC模块CX1020,带TwinCAT PLC/NCI软件,通过EtherCAT总线与I/O模块、AX5000系列伺服驱动装置通讯,EK1110是EtherCAT总线的扩展端子模块,它与前一段EtherCA T的末端相连,可将EtherCAT电缆束的电气隔离长度增加到100米,并将E_bus信号转换为100BASE-TX以太网信号。
系统配置如图1所示。
图1 TZ1001控制系统配置图AX5206是双轴2×6A伺服驱动装置,驱动AM3000系列伺服电机,通过EtherCAT与CX1020直接通讯,所有的组态参数与动态数据均通过EtherCAT与PLC、NC实现数据交换。
AX5200系列双轴伺服驱动装置有一个特点,它的两个通道的驱动电流可以软分配,例如对AX5206来说,可以是A通道的负载电流为9A,B通道的负载电流为3A,只要总的工作电流不超过2×6A即可。
各轴的行程限位、参考点等直接接入AX5000,也可接入PLC的I/O 模块。
X1、X2轴位置测量选用Renishaw LM10磁栅尺,其中X1的LM10方波信号通过RS422接入ELCO EMA信号分配器分为两路隔离输出,一路接入EL5101增量编码器接口模块,实现闭环控制,另一路作为X光机扫描触发模块的触发信号。
倍福Beckhoff在步进电机控制中的应用研究倍福Beckhoff在步进电机控制中的应用研究类别:传感与控制该系统为某主机电控系统,完成对光束的准直过程中的参数诊断、数据采集、闭环控制等实时控制功能以及与主控系统的通信功能。
步进电机以性价比高,实时效果好,不需要昂贵的反馈系统著称,该系统中采用了一千多个步进电机来实现对光束的准直。
神光原型采用控制卡控制大量步进电机,控制卡控制步进电机没有负载位置的反馈信号,实时效果差,故障定位非常困难;试验中采用西门子PLC(Programmable Logic Controller,可编程逻辑控制器)控制这些电机可靠性好,但控制少量步进电机时比较简单,控制大量步进电机时时序复杂,接线复杂,成本高,调试困难。
最终方案采用德国Beckhoff公司的自动化产品,如嵌入式控制器,现场总线端子、步进电机总线端子等设备控制电机,该方案具有成本较低、操作简便、占用空间小等优点,也提高了系统的性能和可靠性,现已通过试验和审进入调试阶段。
1 步进电机运动控制系统总体设计思想电控系统的总体设计思想为:控制系统设计应分别满足现场独立控制与远程集中控制,各子系统具备对系统各类设备的状态进行实时监测的功能,包括故障定位检测和报警;具备对系统各设备进行参数设置、参数采集、存储、处理等功能。
主控计算机位于主控制室内,通过1 000 Mb/s光纤网络与分控计算机通信,分控计算机通过光纤交换机与控制设备采用工业以太网通信,其网络拓扑图如图1所示。
2 步进电机运动控制系统设计方案 2.1 倍福步进电机总体控制架构设计采用基于嵌入式PC的模块化运动控制器,型号为CX1020,运动控制器本身集成双Ethernet 接口,其中一个向上连接到现场工业以太网,接受运动控制的调用指令,另一个可以作为本地调试的网络接口。
运动控制器、运动控制网络接口部件、步进电机驱动器通过硬实时的超高速以太网EtherCAT(Ethernet for Controland Automation Technology)构成运动控制网络系统,采用EtherCAT取代以往的现场总线传输技术,可以显著减少控制系统CPU的负荷,而且无需任何智能主站卡,适合集中式与分布式控制体系。