直升机飞行动力学书籍下载
- 格式:doc
- 大小:39.50 KB
- 文档页数:6

现代直升机旋翼空气动力学•目录:•第1章绪论1.1空气动力学的内容1.1.1定义1.1.2研究问题的类型1.2空气动力学的研究工具1.2.1解析工具1.2.2计算工具1.2.3实验工具1.3直升机概况1.3.1发展简述1.3.2直升机分类1.4直升机空气动力学发展概况1.4.1经典空气动力学理论1.4.2基于CFD技术的旋翼流场模拟1.4.3旋翼计算声学简介1.4.4旋翼/机身等多部件的气动干扰简介1.5旋翼基本参数介绍参考文献第2章旋翼动量理论2.1引言2.2垂直飞行时的动量理论2.2.1垂直上升状态2.2.2悬停状态2.2.3垂直下降状态2.2.4诱导速度普遍规律2.3前飞时的动量理论2.3.1平飞状态2.3.2爬升和下滑状态2.3.3诱导速度普遍规律参考文献第3章旋翼叶素理论3.1引言3.2桨叶翼型3.2.1桨叶翼型几何参数3.2.2桨叶翼型空气动力学特性3.2.3桨叶翼型设计3.3垂直飞行时的叶素理论3.3.1旋翼拉力和功率的微分形式3.3.2旋翼拉力和功率的积分形式3.3.3旋翼拉力的近似解析式3.3.4旋翼功率的近似解析式3.3.5完善系数3.4基于叶素-环量理论的拉力系数3.5基于叶素-动量组合理论的拉力系数3.6前飞时的叶素理论3.6.1旋翼拉力和功率的积分形式3.6.2旋翼拉力和功率的近似解析式3.6.3旋翼功率的一般表达式参考文献第4章旋翼涡流理论4.1引言4.2基本概念4.2.1Kelvin定理4.2.2Helmholtz定律4.2.3Biot-Savart定律4.2.4涡与环量4.3垂直飞行时的涡流理论4.3.1儒氏旋翼涡系模型4.3.2儒氏旋翼诱导速度4.3.3非儒氏旋翼涡系模型4.3.4非儒氏旋翼诱导速度4.4前飞时的涡流理论4.4.1旋翼涡系模型4.4.2旋翼诱导速度4.4.3桨叶附着涡环量的求解参考文献第5章旋翼自由尾流分析技术5.1引言5.2涡动力学基础5.3自由涡系模型5.3.1旋翼桨叶涡系模型5.3.2旋翼尾迹模型5.3.3旋翼桨尖涡模型5.3.4涡核扩散模型5.4桨叶附着涡环量求解5.5远尾迹涡丝控制方程5.6远尾迹涡丝控制方程的求解5.6.1远尾迹周期边界条件5.6.2PIPC松弛迭代法求解过程5.7自由尾迹/面元法的耦合模型算例5.7.1求解方法5.7.2涡/面干扰5.7.3算例分析参考文献第6章旋翼CFD理论基础知识6.1引言6.2适合旋翼的流体力学控制方程组6.2.1连续性方程6.2.2动量方程6.2.3能量方程6.2.4控制方程的选择形式6.3控制方程的离散化6.3.1有限差分法(FDM)6.3.2有限体积法(FVM)6.4网格生成简介6.4.1椭圆网格生成实例6.4.2多区重叠网格(嵌套网格)简介6.5结论参考文献第7章旋翼N-S方程SIMPLE数值模拟方法7.1引言7.2SIMPLE算法7.2.1交错网格技术7.2.2SIMPLE算法基本假设7.2.3SIMPLE算法基本步骤7.2.4SIMPLE算法的简单算例7.3SIMPLER算法简介7.4代数方程组的求解7.5前飞旋翼湍流场的数值模拟算例7.5.1流场控制方程7.5.2动量源项7.5.3算例方案描述7.5.4前飞流场分析7.5.5前飞性能预测7.6垂直下降旋翼湍流场的数值模拟算例7.6.1桨盘压差源项计算7.6.2垂直下降算例方案描述7.6.3模型旋翼悬停算例验证7.6.4垂直下降算例流场分析7.6.5垂直下降性能预测7.7斜下降旋翼湍流场的数值模拟算例7.7.1计算模型及方法7.7.2旋翼升阻气动特性7.7.3单片桨叶压力场随周期的变化7.7.4孤立旋翼流场分析7.7.5旋翼/机身组合流场分析参考文献第8章旋翼TVD数值模拟方法8.1引言8.2TVD格式的概念和性质8.2.1TVD的概念8.2.2TVD的性质8.3TVD格式的构造8.3.1一阶TVD格式8.3.2二阶TVD格式8.3.3高阶TVD格式简介8.4对一维和多维方程组的推广8.4.1一维方程组的推广8.4.2多维方程组的推广8.5算例:旋翼流场Euler方程Jameson/TVD数值模拟8.5.1主控方程8.5.2数值方法8.5.3结果分析参考文献第9章旋翼绕流N-S方程数值计算方法9.1引言9.2Jameson格式9.2.1标量人工粘性的中心差分方法9.2.2各向异性的人工粘性9.2.3矩阵人工粘性模型9.3TVD格式9.3.1TVD的概念9.3.2单调格式、保单调格式和TVD性质的充分条件9.3.3显式一阶TVD格式举例9.4一种Jameson/TVD混合格式9.4.1N-S方程和通量修正法9.4.2旋翼流场N-S方程Jameson/TVD数值模拟方法9.5Jameson格式与其他格式9.5.1积分形式下的旋翼流动控制方程9.5.2空间离散格式9.5.3悬停旋翼流动的数值模拟9.5.4前飞旋翼流动的数值模拟参考文献第10章旋翼洗流和旋翼/机身/发动机耦合流场分析10.1引言10.2旋翼洗流分析10.3旋翼/机身干扰流场10.3.1"作用盘"假设10.3.2N-S方程直接模拟10.4旋翼/机身/发动机耦合流场10.5旋翼/机身/柱体耦合流场10.5.1旋翼/机身耦合流场10.5.2机身/柱体耦合流场参考文献第11章旋翼计算声学基础11.1引言11.2Ffowcs Williams-Hawkings方程和Kirchhoff理论11.2.1Ffowcs Williams-Hawkings方程11.2.2Kirchhoff理论11.3两种方法的比较11.4桨涡干扰噪声的模拟11.5计算流体力学方法参考文献习题与思考题附录彩图页。
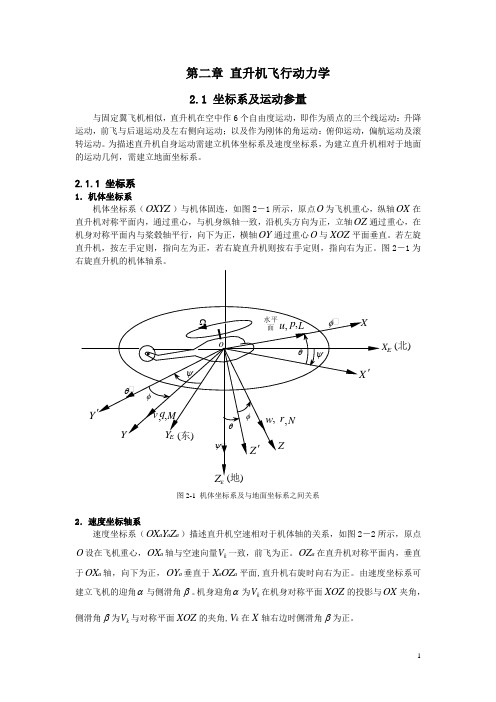
第二章 直升机飞行动力学2.1 坐标系及运动参量与固定翼飞机相似,直升机在空中作6个自由度运动,即作为质点的三个线运动:升降运动,前飞与后退运动及左右侧向运动;以及作为刚体的角运动:俯仰运动,偏航运动及滚转运动。
为描述直升机自身运动需建立机体坐标系及速度坐标系,为建立直升机相对于地面的运动几何,需建立地面坐标系。
2.1.1 坐标系1.机体坐标系机体坐标系(OXYZ )与机体固连,如图2-1所示,原点O 为飞机重心,纵轴OX 在直升机对称平面内,通过重心,与机身纵轴一致,沿机头方向为正,立轴OZ 通过重心,在机身对称平面内与桨毂轴平行,向下为正,横轴OY 通过重心O 与XOZ 平面垂直。
若左旋直升机,按左手定则,指向左为正,若右旋直升机则按右手定则,指向右为正。
图2-1为右旋直升机的机体轴系。
θφψE Z E X (北)(地图2-1 机体坐标系及与地面坐标系之间关系2.速度坐标轴系速度坐标系(a a a OX Y Z )描述直升机空速相对于机体轴的关系,如图2-2所示,原点O 设在飞机重心,a OX 轴与空速向量k V 一致,前飞为正。
a OZ 在直升机对称平面内,垂直于a OX 轴,向下为正,a OY 垂直于a a X OZ 平面,直升机右旋时向右为正。
由速度坐标系可建立飞机的迎角α与侧滑角β。
机身迎角α为k V 在机身对称平面XOZ 的投影与OX 夹角,侧滑角β为k V 与对称平面XOZ 的夹角,k V 在X 轴右边时侧滑角β为正。
图2-2 速度坐标系 3.地面坐标系地面坐标系(E E E OX Y Z )相对于地球表面不动,如图2-3所示,原点O 设在地面上某点(可设在起飞点),纵轴E OX 应指北,或指向应飞航向,立轴E OZ 垂直向下为正,E OY 轴与E E OX Y 平面垂直,指向由右手定则决定。
由图可知,地面坐标系可建立直升机相对于地面飞行的航迹倾斜角γ及航迹偏转角χ。
航迹角γ是指直升机的地速d V 与地平面夹角,向上为正。


直升机飞行动力学pdf直升机飞行动力学是研究直升机飞行姿态、操纵和性能的科学。
它涉及到了直升机的机械运动、气动特性和控制系统等方面。
直升机飞行动力学的研究对于提高直升机的飞行性能、安全性和稳定性具有重要意义。
首先,直升机的飞行姿态是直升机飞行动力学的基础。
直升机可以实现垂直起降和悬停飞行,这要求它具有良好的操纵和控制能力。
直升机在不同的飞行姿态下,受到的气动力和力矩的作用也是不同的,所以研究直升机飞行姿态对于提高直升机的飞行性能和操纵性非常重要。
其次,直升机的气动特性也是直升机飞行动力学的核心内容之一。
直升机的气动力学特性与机翼飞行器有很大的不同,主要表现在气动力的产生和控制上。
直升机的旋翼产生提供升力,同时也产生扭矩,这需要通过尾桨或者飞行员的操纵来平衡。
直升机的旋翼受到气动力的影响,包括升力、阻力、剖面损失和尖端损失等。
研究直升机的气动特性可以帮助我们深入理解直升机的飞行机理,并优化设计直升机的飞行性能。
此外,直升机控制系统的研究也是直升机飞行动力学的重要内容。
直升机的控制系统包括操纵系统和稳定系统。
操纵系统通过操纵杆和脚蹬等操纵装置来控制直升机的飞行姿态和运动。
稳定系统通过自动平衡装置和飞行仪表来维持直升机的稳定飞行。
直升机的操纵和控制系统对于提高直升机的飞行安全性和稳定性至关重要。
总之,直升机飞行动力学的研究是一门综合性的学科,涉及机械运动、气动特性和控制系统等方面。
研究直升机飞行动力学可以帮助我们深入了解直升机的飞行原理,优化设计直升机的性能和安全性,并指导直升机的飞行操作。
在未来的研究中,我们需要进一步探索直升机飞行动力学的理论和应用,为直升机的发展和应用做出更大的贡献。
第1篇第一章:直升机概述1.1 直升机的定义与分类直升机是一种垂直起降的航空器,它通过旋翼的旋转产生升力。
根据旋翼的数量,直升机可分为单旋翼直升机和多旋翼直升机。
单旋翼直升机通过尾桨来平衡旋翼的扭矩,而多旋翼直升机则通过多个旋翼来平衡扭矩。
1.2 直升机的发展历程直升机的发展可以追溯到20世纪初,当时的航空先驱们尝试通过旋转的叶片来产生升力。
经过多年的研究和实验,直升机逐渐从理论走向实践,并在第二次世界大战期间开始用于军事领域。
随着技术的进步,直升机在民用领域也得到了广泛的应用。
第二章:直升机气动原理2.1 旋翼的气动特性旋翼是直升机产生升力的主要部件,其气动特性如下:(1)旋翼叶片的形状和数量:旋翼叶片的形状和数量对直升机的气动性能有很大影响。
叶片形状决定了升力和推力的产生,叶片数量则影响了直升机的稳定性和机动性。
(2)旋翼叶片的转速:旋翼叶片的转速越高,产生的升力和推力越大。
但过高的转速会导致叶片振动和噪声增大。
(3)旋翼叶片的攻角:旋翼叶片的攻角是指叶片与气流方向的夹角。
攻角越大,产生的升力越大,但过大的攻角会导致叶片失速。
2.2 旋翼的空气动力学分析旋翼的空气动力学分析主要包括以下几个方面:(1)旋翼叶片的升力系数:升力系数是旋翼叶片产生升力的能力,它与叶片形状、攻角和转速等因素有关。
(2)旋翼叶片的阻力系数:阻力系数是旋翼叶片在飞行过程中受到的空气阻力与升力的比值。
阻力系数越小,直升机的燃油效率越高。
(3)旋翼叶片的扭矩:扭矩是旋翼叶片旋转时产生的力矩,它与升力和转速有关。
第三章:直升机气动设计3.1 旋翼设计旋翼设计是直升机气动设计的关键环节,主要包括以下几个方面:(1)叶片形状:叶片形状决定了旋翼的气动性能,如升力系数、阻力系数和扭矩等。
(2)叶片数量:叶片数量影响了直升机的稳定性和机动性。
(3)叶片材料:叶片材料对旋翼的强度、重量和耐久性有很大影响。
3.2 尾翼设计尾翼设计主要包括尾桨和尾梁,其作用是平衡旋翼的扭矩,提高直升机的稳定性和操纵性。
link appraisement航空工业直升机设计研究所顾新,男,汉族,江西景德镇,航空工业直升机设计研究所飞行控制及工程仿真研究室,研究方向:飞行仿真。
顾 新图1 飞行动力学仿真系统组成CHINA SCIENCE AND TECHNOLOGY INFORMATION Mar .2019·中国科技信息2019年第6期航空航天◎变距角和尾桨变距角;旋翼气动模块、尾桨气动模块、机身气动模块、起落架动力学模块接收飞控系统模块的变距角、姿态、角速度、空速、大气密度等数据后,解算全机所受到的外部力和力矩,最后通过六自由度运动模块,计算出当前帧的位置、速度、加速度、姿态、角速度、角加速度等数据。
大气环境模块大气环境模块根据外部设置的气压高度、温度和风速,以及直升机当前飞行状态,解算总温、总压、空气密度、空速等参量,作为其他模型的输入量。
旋翼气动模块旋翼气动模块由旋翼气动载荷模块、旋翼流场模块和旋翼操纵系统(桨毂)模块组成,从结构上看,旋翼系统模块又由桨叶模型、操纵模型、铰链模型、桨毂模型、旋翼轴模型和离合器等结构模型组成,旋翼尾迹模型、旋翼桨叶气动载荷模型是旋翼系统的气动模型组件,桨叶挥舞模型、桨叶摆振模型是旋翼系统的动力学模型组件。
根据直升机相对空气的运动状态,来计算所产生的气动力和力矩。
再通过一系列坐标变换,计算出对直升机重心的力和力矩。
尾桨气动模块尾桨作为直升机上特有的一个部件,主要用来平衡主旋翼的反扭矩,并且飞行员可以通过操纵脚蹬控制尾桨桨距,改变尾桨的气动力,从而使直升机产生偏航力矩,起到悬停转弯和消除前飞时的侧滑的作用。
尾桨气动模块的建模方法与主旋翼类似,根据直升机相对空气的运动状态,来计算所产生的气动力和力矩。
再通过一系列坐标变换,计算出对直升机重心的力和力矩。
机身气动模块直升机机身气动模块,在直升机飞行力学和飞行仿真软件中占有重要的地位。
直升机的机身气动模型和固定翼飞机的机身模型相比有较大的不同,相比之下计算量要大得多。
直升机飞行动力学书籍下载
动力学, 直升机, 书籍, 下载, 飞行
内容提要:
直升机的飞行力学问题是直升机设计过程中带有全局性的重要研究问题。
本教材主要介绍直升机飞行力学的基本理论和基本研究方法。
其主要内容包括旋翼空气动力学基础,直升机的平衡、性能、稳定性和操纵性分析,以及机动飞行运动学等方面的知识。
从数学角度介绍了参考系的转换和直升机非定常运动方程。
在侧重于物理概念的基础上较详尽地阐述了旋翼挥舞特性和直升机飞行力学问题的理论分析和数学模拟方法。
本教材适合于航空院校高年级大学生或研究生使用,也可供从事直升机设计与研究的
工程技术人员及其他相关专业人员学习参考。
《直升机飞行力学》教材旨在使航空院校飞行器设计专业的高年级大学生或研究生通过学习掌握直升机飞行力学的基本研究方法和工程应用的理论基础,也是一本供从事直升机飞行力学技术人员阅读的专业书。
全书共分 9章,第 1章在给出严密的定义之后主要讨论飞行力学所研究问题的类型和研究工具。
第 2章给出参考系及其转换的关系,主要导出一般的飞行器动力学使用的参考系和直升机特有的参考系之间的转换式,并给出直升机运动参数的定义。
第 3章介绍非定常运动的一般方程,导出任意运动参考系中的速度和加速度的表达式,给出风轴系和体轴系中的力和力矩方程,就直升机的部件(旋翼、尾桨、水平尾面、机身)给出其作用和力的描述。
第 4章讨论稳定飞行状态下的性能计算。
在描述活塞式发动机和涡轮轴发动机的特性之后,提出直升机作为功率型飞行器的概念。
讨论需用功率曲线、功率平衡关系和剩余功率,最后给出垂直飞行性能、平飞性能、爬升性能的计算方法。
第 5章论述旋翼空气动力学的应用问题,介绍翼型的升力、阻力和俯仰力矩特性,旋翼非定常空气动力学,旋翼组合动量理论与叶素理论、涡流理论。
第 6章讨论旋翼的挥舞特性,阐明旋翼挥舞的控制方法,推导铰接式、无铰式旋翼挥舞方程。
在给出挥舞变距扭转耦合运动方程的基础上,讨论旋翼 /机体耦合作用,特别是由俯仰和滚转角速度产生的挥舞。
第 7章介绍直升机的平衡,内容包括平衡操纵方式、平衡方程的组成、直升机悬停和前飞时的平衡计算方法。
第 8章介绍直升机稳定性和操纵性的分析方法,推导直升机线化的受扰运动方程,给出直升机稳定性导数和操纵性导数的计算公式。
第 9章论述直升机机动飞行运动学,详细介绍了纵向、横向和三维机动飞行典型科目的定义与计算方法。
本书在编写过程中得到了北京航空航天大学校领导、教务处领导和北京航空航天大学出版社的大力支持;李椿萱院士审定了书稿,并提出了宝贵的修改意见。
此外,本书的完成还得益于作者所在课题组的集体智慧,特别是陈科博士、袁坤刚博士做了一些有益的工作,
在此一并表示感谢。
由于编者水平有限,书中不妥之处敬请读者批评指正。
第 1章绪论
1.1 飞行动力学的内容 1
1.1.1 定义 1
1.1.2 研究问题的类型 3
1.2 飞行动力学的研究工具 4
1.2.1 解析工具 4
1.2.2 计算工具 4
1.2.3 实验工具 4
1.3 直升机概况 5
1.3.1 发展简述 5
1.3.2 直升机分类 7
第 2章参考系及其转换
2.1 引言 9
2.2 在飞行器动力学中使用的参考系 9
2.2.1 惯性参考系 F
I
9
2.2.2 固定于地球的参考系 F
E
10
2.2.3 连带于飞行器的垂直参考系 F
V
10
2.2.4 固定于大气的参考系 F
A
10
2.2.5 风轴系 F
W
11
2.2.6 体轴系 F
B
11
2.2.7 稳定性轴系 F
S
12
2.3 直升机运动参数的定义 12
2.3.1 直升机角运动参数 12
2.3.2 直升机线运动参数 13
2.4 常用两种坐标系的比较 14
2.4.1 体轴系 15
2.4.2 体轴系与连带于飞行器的垂直参考系的关系 16
2.4.3 体轴系与风轴系的关系 16
2.4.4 体轴系与旋翼构造轴系的关系 17
2.4.5 翼型坐标轴系 18
第 3章非定常运动的一般方程
3.1 引言 19
3.2 在任意运动参考系中的速度和加速度 19
3.3 风轴系中的力方程 20
3.4 体轴系中的力和力矩方程 21
3.4.1 力方程 21
3.4.2 力矩方程 22
3.5 直升机各部件作用和力的描述 23
3.5.1 旋翼 23
3.5.2 尾桨 25
3.5.3 水平尾面 29
3.5.4 机身 29
第 4章性能分析
4.1 引言 31
4.2 发动机特性 31
4.2.1 活塞式发动机 31
4.2.2 涡轮轴发动机 32
4.3 需用功率曲线 35
4.3.1 直升机作为功率型飞行器概念的提出 35
4.3.2 需用功率与剩余功率 36
4.4 垂直飞行性能 37
4.4.1 功率平衡关系 37
4.4.2 性能计算 37
4.5 前飞性能 40
4.5.1 平飞极限速度 40
4.5.2 续航性能 41
4.5.3 爬升性能 44
4.6 自转性能 45
第 5章旋翼空气动力学的应用
5.1 引言 47
5.2 翼型升力阻力特性 47
5.2.1 升力特性 47
5.2.2 阻力特性 49
5.3 翼型俯仰力矩特性 50
2 直升机飞行力学
5.4 旋翼空气动力学基础 52
5.4.1 旋翼组合动量理论与叶素理论 52
5.4.2 旋翼涡流理论 53
5.5 旋翼空气动力学的其他问题 56
5.5.1 非定常气动力模型 56
5.5.2 旋翼动态失速 59
第 6章旋翼的挥舞特性
6.1 挥舞定性讨论及控制方法 61
6.1.1 旋翼挥舞特性 61
6.1.2 旋翼挥舞控制方法 64
6.2 计入铰外伸量影响的挥舞方程 66
6.3 无铰旋翼挥舞方程 68
6.4 挥舞变距扭转耦合运动方程 69
6.4.1 桨叶弹性挥舞偏微分方程 69
6.4.2 刚性变距和弹性扭转运动方程 69
6.5 由俯仰和滚转角速度产生的挥舞 70
第 7章直升机的平衡
7.1 引言 72
7.2 平衡操纵方式 72
7.3 平衡方程的组成 73
7.4 平衡计算原则 74
7.5 直升机悬停时的平衡 75
7.5.1 纵向平衡 75
7.5.2 横航向平衡 79
7.6 直升机平飞时的平衡 82
7.6.1 纵向平衡 82
7.6.2 横航向平衡 86
7.6.3 机体 /旋翼全耦合纵横向运动的平衡计算 89
第 8章稳定性和操纵性分析
8.1 引言 91
8.2 直升机线化受扰运动方程 92
8.2.1 小扰动与运动方程组的线性化概念 92
8.2.2 扰动运动参数 94
8.2.3 直升机小扰动线性化运动方程组 96
3目录
8.3 直升机的部件导数 97
8.3.1 旋翼的部件导数、过渡导数、孤立导数和简单导数 97
8.3.2 尾桨的部件导数和孤立导数 99
8.3.3 平尾的部件导数 100
8.3.4 机身的部件导数 100
8.4 稳定性导数和操纵性导数 100
8.4.1 直升机的稳定性导数 100
8.4.2 操纵性导数 104
8.5 直升机稳定性分析 105
8.5.1 静稳定性 105
8.5.2 直升机的阻尼 109
8.5.3 直升机的动稳定性 111
8.5.4 稳定性分析 113
8.6 直升机操纵性分析 116
8.6.1 基本概念 116
8.6.2 直升机操纵性分析 118
第 9章机动飞行运动学
9.1 引言 122
9.2 国外的飞行试验研究 122
9.3 机动飞行的运动学方程 125
9.3.1 机动飞行坐标系 125
9.3.2 机动动作的分类 125
9.3.3 运动学方程 126
9.4 机动飞行典型科目 127
9.4.1 纵向机动飞行 127
9.4.2 横向机动飞行 135
9.4.3 三维机动飞行 138
9.5 算例 141
9.5.1 平飞转弯 141
9.5.2 筋斗 143
9.5.3 横滚 147
9.6 结语 148
习题思考题 150
参考文献 154
点击下载:直升机飞行力学
图书打开。