机器人腕部结构
- 格式:doc
- 大小:3.44 MB
- 文档页数:6
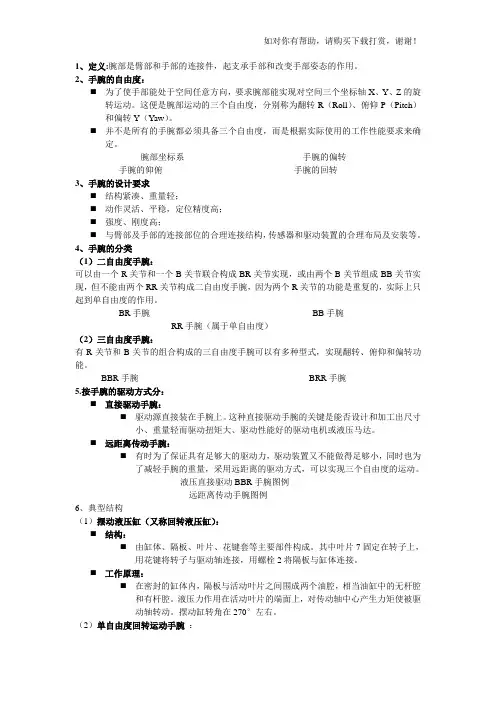
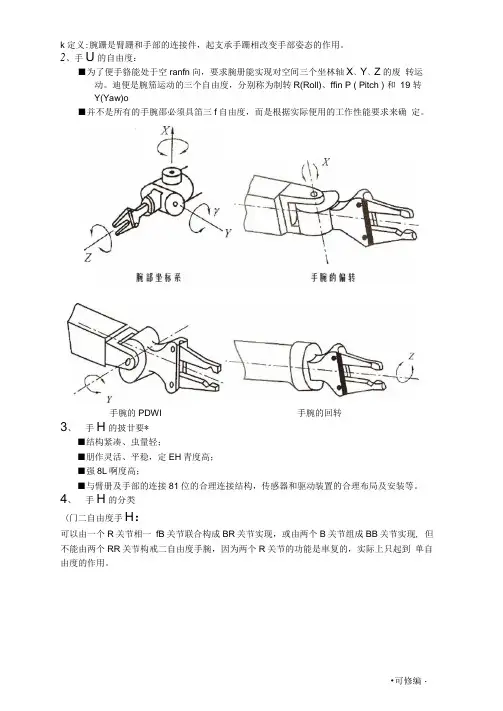
1、定义:腕部是臂部和手部的连接件,起支承手部和改变手部姿态的作用。
2、手腕的自由度:⏹为了使手部能处于空间任意方向,要求腕部能实现对空间三个坐标轴X、Y、Z的旋转运动。
这便是腕部运动的三个自由度,分别称为翻转R(Roll)、俯仰P(Pitch)和偏转Y(Yaw)。
⏹并不是所有的手腕都必须具备三个自由度,而是根据实际使用的工作性能要求来确定。
腕部坐标系手腕的偏转手腕的仰俯手腕的回转3、手腕的设计要求⏹结构紧凑、重量轻;⏹动作灵活、平稳,定位精度高;⏹强度、刚度高;⏹与臂部及手部的连接部位的合理连接结构,传感器和驱动装置的合理布局及安装等。
4、手腕的分类(1)二自由度手腕:可以由一个R关节和一个B关节联合构成BR关节实现,或由两个B关节组成BB关节实现,但不能由两个RR关节构成二自由度手腕,因为两个R关节的功能是重复的,实际上只起到单自由度的作用。
BR手腕BB手腕RR手腕(属于单自由度)(2)三自由度手腕:有R关节和B关节的组合构成的三自由度手腕可以有多种型式,实现翻转、俯仰和偏转功能。
BBR手腕BRR手腕5.按手腕的驱动方式分:⏹直接驱动手腕:⏹驱动源直接装在手腕上。
这种直接驱动手腕的关键是能否设计和加工出尺寸小、重量轻而驱动扭矩大、驱动性能好的驱动电机或液压马达。
⏹远距离传动手腕:⏹有时为了保证具有足够大的驱动力,驱动装置又不能做得足够小,同时也为了减轻手腕的重量,采用远距离的驱动方式,可以实现三个自由度的运动。
液压直接驱动BBR手腕图例远距离传动手腕图例6、典型结构(1)摆动液压缸(又称回转液压缸):⏹结构:⏹由缸体、隔板、叶片、花键套等主要部件构成。
其中叶片7固定在转子上,用花键将转子与驱动轴连接,用螺栓2将隔板与缸体连接。
⏹工作原理:⏹在密封的缸体内,隔板与活动叶片之间围成两个油腔,相当油缸中的无杆腔和有杆腔。
液压力作用在活动叶片的端面上,对传动轴中心产生力矩使被驱动轴转动。
摆动缸转角在270°左右。


关节型机器人腕部结构结构设计1绪论1.1 选题背景及其意义本题设计的是关节型机器人腕部结构,主要是整体方案设计和手腕的结构设计及控制系统设计,此课题来源于实际生产,对于目前手工电弧焊接效率低,操作环境差,而且对操作员技术熟练成都要求高,因此采用机器人技术,实现焊接生产操作的柔性自动化,提高产品质量与劳动生产力,实现生产过程自动化,改善劳动条件。
题目要求是:动作范围:手腕回转ο150,摆动ο90,旋转ο360。
各轴最大速度要求:s /30ο。
额定载荷kg 5,最大速度s m /3。
2、腕部最大负荷:5kg 。
机器人是近30年发展起来的一种典型的、机电一体化的、独立的自动化生产工具。
在制造工业中,应用工业机器人技术是提高生产过程自动化,改善劳动条件,提高产品质量和生产效率的有效手段之一,也是新技术革命的一个重要内容。
自古以来,人们所设想的机器人一般是一种在外形和功能上均能模拟人类智能的机器。
特别是在20世纪20年代前后,捷克和美国的一些科幻作家创作了一批关于未来机器人与人类共处中可能发生的故事之类的文学作品,更使机器人在人们的思想中成为一种无所不能的“超人”。
在现实生活中,一些民间工匠根据这些文学描绘,也制造出一些仿人或仿生的机器人。
然而在当时的科技条件下,要使机器人具有某种特殊的“智能”而成为“超人”,显然是不可能的。
美国的戴沃尔设想了一种可控制的机械手,他首先突破了对机器人的传统观点,提出机器人并不一定必须像人,但是必须能做一些人的工作。
1954年,他依据这一想法设计制作了世界上第一台机器人实验装置,发表了《适用于重复作业的通用性工业机器人》一文,并获得了美国专利。
戴沃尔将遥控操纵器的关节型连杆机构与数控机床的伺服轴联结在一起,预定的机械手动作一经编程输入后,机械等就可以离开人的辅助而独立运行。
这种机器人也可以接受示教而完成各种简单任务。
示教过程中操作者用手带动机械手依次通过工作任务的各个位置,这些位置序列记录在数字存储器中,任务的执行过程中,机器人的各个关节在伺服驱动下再现出那些位置序列。
摘要介绍了焊接机器人技术发展的历程及我国焊接机器人技术研究的现状和发展前景。
针对焊接机器人产业化中涉及到的新型结构本体设计、高性能机器人控制器技术及免维护系统设计等关键技术进行了研究,结合Motomanup-6焊接机器人,介绍了采用谐波齿轮减速器及交流伺服电机等精密传动部件进行机器人小臂和腕部结构设计,使得机器人结构变得越来越简单,传动环节减少,提高了系统的精度,减少维护,同时也简化了生产工艺,降低了生产成本。
我国焊接机器人的应用主要集中在汽车、摩托车、工程机械、铁路机车等几个主要行业。
汽车是焊接机器人的最大用户,也是最早用户。
早在70年代末,上海电焊机厂与上海电动工具研究所,合作研制的直角坐标机械手,成功地应用于上海牌轿车底盘的焊接。
我国到1997年底仅有焊接机器人500台,多为弧焊和点焊机器人,而且集中于汽车、摩托车和工程机械三个制造行业,因此我国焊接机器人的发展应首先扩大应用数量和应用领域。
同时也要尽快建立有我国自主知识产权的机器人生产产业。
关键词:弧焊焊接机器人、小臂腕部结构、交流伺服系统AbstractIntroduced a welding robot technology development and the history of China's welding robot technology on the status and development prospects. For welding robot involved in the industrialization of the new body structure design, high-performance robot controller technology and maintenance-free system design and other key technologies have been studied, with Motomanup-6 welding robot, introduced the use of harmonic gear reducer AC servo motor and transmission components such as precision robot arm and wrist structural design, makes robots become more and more simple structure, reduce the transmission links, increase the accuracy of the system, reduce maintenance, but also simplified the production process, reducing The cost of production.China's welding robot application mainly concentrated in the automobile, motorcycle, engineering machinery, railway locomotive, and several other major industries. Motor vehicles are the largest users of robots welding, but also the first users. Back in the late 1970s, Shanghai electric welding machine tool factory and the Shanghai Institute of cooperation in the development of the Cartesian coordinate manipulator, successfully applied to the Shanghai sedan chassis welding. China to the end of 1997 only 500 robot welding, spot welding and more robots for welding, and focus on vehicles, motorcycles and three construction machinery manufacturing industry, the development of China's welding robot should first expand the number of applications and application field. At the same time, as soon as possible the establishment of China's independent intellectual property rights of the robot manufacturing industry.Keywords:arc welding robot, small arm and wrist structural design, AC servo system目 录第一章 前言 (1)1.1 选题背景 (1)1.2焊接机器人毕业设计问题的提出 (4)1.2.1研究的基本内容,拟解决的主要问题 (4)1.2.2研究步骤、方法 (4)第二章 焊接机器人结构设计 (6)2.1小臂腕及结构设计 (6)2.1.1焊接机器人小臂及腕部结构设计方案 (6)2.1.2小臂及腕部整体机构的工作原理 (7)2.2电机的选择 (8)2.3直齿圆锥齿轮设计: (9)2.3.1传动比的选择 (9)2.3.2渐开线直齿圆锥齿轮几何计算 (9)2.4链的选择及链轮设计 (11)2.4.1链传动的特点 (11)2.4.2传动链的分类 (12)2.4.3链的选择 (13)2.5轴承的分类介绍 (14)2.6小臂腕部结构设计中必要的强度校核 (16)2.6.1圆锥齿轮强度校核 (16)2.6.2轴的强度校核 (17)第三章 谐波减速器 (28)3.1谐波减速器的发展 (28)3.2谐波减速器的应用 (28)3.3 谐波减速器的组成及工作原理 (29)3.3.1柔轮常见的结构形式 (29)3.3.2波发生器常见的结构型 (30)3.3.3谐波减速器的工作原理 (30)3.3.4双刚轮谐波减速器 (32)3.4谐波齿轮传动特点 (33)3.5谐波减速器产品系列及结构的特点 (34)3.6谐波减速器的选择 (35)3.7谐波减速器的安装使用与维护(本此设计所需系列) (37)第四章 经济性分析 (38)致谢 (39)参 考 文 献 (40)声明 (42)第一章 前 言机器人是一种在生产中能灵活完成特定操作,并有多种功能的机器。
喷涂机器人手腕分类
在机器人手臂和手爪之间用于支撑和调整手爪的部件就叫机器人手腕。
机器人手腕主要用来确定被抓物体的姿态,一般采用三自由度多关节机构由旋转关节和摆动关节组成,三个关节可形成27种配置。
按照机器人手腕(4、5、6轴)结构形式的不同,喷涂机器人可分为正交球型手腕喷涂机器人、直线形非球型中空手腕喷涂机器人、斜交非球型中空手腕喷涂机器人。
一、正交球型手腕喷涂机器人
正交球型手腕结构喷涂机器人除了具备防爆功能外,其手腕结构与通用六轴关节型工业机器人相同,4、5、6轴为正交球型结构,即一个摆动轴、2个旋转轴,三个轴线相交于一点且两相邻关节的轴线垂直的喷涂机器人。
二、直线形非球型中空手腕喷涂机器人
直线形非球型中空手腕结构喷涂机器人4、5、6轴为三个回转轴,且三个回转轴可重合为一条直线。
三、斜交非球型中空手腕喷涂机器人
斜交非球型中空手腕结构喷涂机器人4、5、6轴为三个回转轴,且三个回转轴相交于两点的形式。

1前言1.1机器人的概念机器人是一个在三维空间中具有较多自由度,并能实现较多拟人动作和功能的机器,而工业机器人则是在工业生产上应用的机器人。
美国机器人工业协会提出的工业机器人定义为:“机器人是一种可重复编程和多功能的,用来搬运材料、零件、工具的操作机”。
英国和日本机器人协会也采用了类似的定义。
我国的国家标准GB/T12643-90将工业机器人定义为:“机器人是一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机。
能搬运材料、零件或操持工具,用以完成各种作业”。
而将操作机定义为:“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。
机器人系统一般由操作机、驱动单元、控制装置和为使机器人进行作业而要求的外部设备组成。
1.1.1操作机操作机是机器人完成作业的实体,它具有和人手臂相似的动作功能。
通常由下列部分组成:a.末端执行器又称手部,是机器人直接执行工作的装置,并可设置夹持器、工具、传感器等,是工业机器人直接与工作对象接触以完成作业的机构。
b. 手腕是支承和调整末端执行器姿态的部件,主要用来确定和改变末端执行器的方位和扩大手臂的动作范围,一般有2~3个回转自由度以调整末端执行器的姿态。
有些专用机器人可以没有手腕而直接将末端执行器安装在手臂的端部。
c. 手臂它由机器人的动力关节和连接杆件等构成,是用于支承和调整手腕和末端执行器位置的部件。
手臂有时包括肘关节和肩关节,即手臂与手臂间。
手臂与机座间用关节连接,因而扩大了末端执行器姿态的变化范围和运动范围。
d. 机座有时称为立柱,是工业机器人机构中相对固定并承受相应的力的基础部件。
可分固定式和移动式两类。
1.1.2驱动单元它是由驱动器、检测单元等组成的部件,是用来为操作机各部件提供动力和运动的装置。
1.1.3控制装置它是由人对机器人的启动、停机及示教进行操作的一种装置,它指挥机器人按规定的要求动作。
1.1.4人工智能系统它由两部分组成,一部分是感觉系统,另一部分为决策-规划智能系统。
k定义:腕跚是臂跚和手部的连接件,起支承手跚相改变手部姿态的作用。
2、手U的自由度:■为了便手貉能处于空ranfn向,要求腕册能实现对空间三个坐林轴X、Y、Z的废转运动。
迪便是腕笳运动的三个自由度,分别称为制转R(Roll)、ffin P ( Pitch ) 和19 转Y(Yaw)o■并不是所有的手腕邵必须具笛三f自由度,而是根据实际便用的工作性能要求来确定。
手腕的PDWI 手腕的回转3、手H的披廿要*■结构紧凑、虫量轻;■朋作灵活、平稳,定EH青度高;■强8L啊度高;■与臂册及手部的连接81位的合理连接结构,传感器和驱动装置的合理布局及安装等。
4、手H的分类(门二自由度手H:可以由一个R关节相一fB关节联合构成BR关节实现,或由两个B关节组成BB关节实现, 但不能由两个RR关节构戒二自由度手腕,因为两个R关节的功能是車复的,实际上只起到单自由度的作用。
翻转(c)RR手腕(属于单自由厦)(2 )三自由度手Rh有R £节和B关节的组合构成的三自由度手腕可以有多种型氏,实观甜转、備仰和備转血能。
BBR手腕BRR手腕5. 按手ji的烟动方式分:■直接駆动手Ji:■驰动澹宜接芸在手腕上。
逹种直接驱动手腕的关址是能否设岀尺寸小、車量轻而驱动扭拒夫、驰动性能好的驱动电机或液压马达。
■传动手阖:■有时为了保证貝有足昭大的驰朋力,驱动装置Q不能做得足够小,冋时也为了廠轻手腕的車量,采用远卽离的驱动方式,可以实现三个自由度的运动。
220-偏钱浪压肓接駆动BBR手腕图例远即离传动手腕图例6、典里结构(D g动浪压H 压缸):■结枳■由缸体、用板、叶片、花邃套等壬要跚件构戒。
貝中叶片7固定在转子上,用花键将转子与驱朋轴连接,用螺栓2將隔极与H体连接。
■工作原理:■在密封的iltt,用板与活动时片之同围应两个油腔,当油亂中的无杆腔和有杆腔。
液压力作用在Siinf片的端面上,对传动轴中心严生力矩使被驱动(2) 单自由SBftg 动手H :■ 结构箝点:■机器人手部的合是由汽紙驱动的,而手腕的回转运动则由回转液圧幻实现。
详解机器人手腕结构图————————————————————————————————作者:————————————————————————————————日期:【详解】机器人手腕结构图机器人手腕是连接末端操作器和手臂的部件,它的作用是调节或改变工件的方位, 因而它具有独立的自由度,以使机器人末端操作器适应复杂的动作要求。
工业机器人一般需要6个自由度才能使手部达到目标位置并处于期望的姿态。
为了使手部能处于空间任意方向, 要求腕部能实现对空间三个坐标轴x、y、z的转动,即具有翻转、俯仰和偏转三个自由度,如图2.31所示。
通常也把手腕的翻转叫做Roll,用R表示;把手腕的俯仰叫做Pitch,用P表示; 把手腕的偏转叫Yaw,用Y表示。
图2.31 手腕的自由度(a)绕z轴转动; (b)绕y轴转动; (c) 绕x轴转动;(d) 绕x、y、z轴转动手腕的分类1.按自由度数目来分手腕按自由度数目来分, 可分为单自由度手腕、2自由度手腕和3自由度手腕。
(1)单自由度手腕,如图2.32所示。
图(a)是一种翻转(Roll)关节, 它把手臂纵轴线和手腕关节轴线构成共轴形式。
这种R关节旋转角度大, 可达到360°以上。
图(b)、(c)是一种折曲(Bend)关节(简称B关节), 关节轴线与前后两个连接件的轴线相垂直。
这种B关节因为受到结构上的干涉, 旋转角度小,大大限制了方向角。
图(d)所示为移动关节。
图2.32单自由度手腕(a) R手腕;(b) B手腕;(c)Y手腕;(d) T手腕(2) 2自由度手腕,如图2.33所示。
2自由度手腕可以由一个R关节和一个B关节组成BR手腕(见图2.33(a)),也可以由两个B关节组成BB手腕(见图2.33(b))。
但是,不能由两个R关节组成RR手腕,因为两个R共轴线,所以退化了一个自由度, 实际只构成了单自由度手腕,见图2.33(c)。
图2.33 二自由度手腕(a) BR手腕; (b) BB手腕; (c) RR手腕(3)3自由度手腕,如图2.34所示。
优秀设计学科门类:单位代码:毕业设计说明书(论文)关节型机器人腕部结构设计学生姓名所学专业班级学号指导教师XXXXXXXXX系二○**年X X月任务书一、设计内容题目来源于生产实际。
设计一个用于焊接的关节型机器人,进行机器人的总体方案设计、腕部及执行器结构设计及其零件设计。
二、设计依据焊接关节型机器人具有六个自由度,腰关节回转,臂关节俯仰,肘关节俯仰,腕关节仰腕、摆腕和旋腕,腕部最大负荷4kg,最大速度2m/s,最大工作空间半径1500mm。
三、技术要求1、机器人应能满足工作要求,保证焊接精度;2、工作可靠,结构简单;3、装卸方便,便于维修、调整;4、尽量使用通用件,以便降低制造成本。
四. 主要参考文献:1、殷际英.何广平.关节型机器人:北京:化学工业出版社,2003.2、马香峰.工业机器人的操作机设计.北京:冶金工业出版社,1996.3、费仁元.张慧慧.机器人机械设计和分析.北京:北京工业大学出版社,1998.4、周伯英.工业机器人设计.北京:机械工业出版社,1995.5、蔡自兴.机器人学.北京:清华大学出版社,2000.6、宗光华,刘海波译.机器人技术手册. 北京:科学出版社,1996.7、徐卫良,钱瑞明译.机器人操作的数学导论. 北京:机械工业出版社,1998.8、孙迪生,王炎.机器人控制技术.北京:机械工业出版社,1998.9、徐灏.机械设计手册.第二版.北京:机械工业出版社,2000.10、成大先.机械设计手册.第4版. 北京:化学工业出版社,2002.开题报告关节型机器人腕部结构设计摘要:为了提高生产效率和焊接质量,满足特定的工作要求,本题设计用于焊接的关节型机器人的手腕和末端执行器。
根据机器人的工作要求进行了机器人的总体设计。
确定机器人的外形时,拟定了手腕的传动路径,选用直流电动机,合理布置了电机、轴和齿轮,设计了齿轮和轴的结构,并进行了强度校核计算。
传动中采用了软轴、波纹管联轴器和行星齿轮机构,实现了摆腕、转腕和提腕的三个自由度的要求。
1、定义:腕部就是臂部与手部的连接件,起支承手部与改变手部姿态的作用。
2、手腕的自由度:
⏹为了使手部能处于空间任意方向,要求腕部能实现对空间三个坐标轴X、Y、Z的旋
转运动。
这便就是腕部运动的三个自由度,分别称为翻转R(Roll)、俯仰P(Pitch)与偏转Y(Yaw)。
⏹并不就是所有的手腕都必须具备三个自由度,而就是根据实际使用的工作性能要求
来确定。
腕部坐标系手腕的偏转
手腕的仰俯手腕的回转
3、手腕的设计要求
⏹结构紧凑、重量轻;
⏹动作灵活、平稳,定位精度高;
⏹强度、刚度高;
⏹与臂部及手部的连接部位的合理连接结构,传感器与驱动装置的合理布局及安装等。
4、手腕的分类
(1)二自由度手腕:
可以由一个R关节与一个B关节联合构成BR关节实现,或由两个B关节组成BB关节实现,但不能由两个RR关节构成二自由度手腕,因为两个R关节的功能就是重复的,实际上只起到单自由度的作用。
BR手腕BB手腕
RR手腕(属于单自由度)
(2)三自由度手腕:
有R关节与B关节的组合构成的三自由度手腕可以有多种型式,实现翻转、俯仰与偏转功能。
BBR手腕BRR手腕
5、按手腕的驱动方式分:
⏹直接驱动手腕:
⏹驱动源直接装在手腕上。
这种直接驱动手腕的关键就是能否设计与加工出尺
寸小、重量轻而驱动扭矩大、驱动性能好的驱动电机或液压马达。
⏹远距离传动手腕:
⏹有时为了保证具有足够大的驱动力,驱动装置又不能做得足够小,同时也为了
减轻手腕的重量,采用远距离的驱动方式,可以实现三个自由度的运动。
液压直接驱动BBR手腕图例
远距离传动手腕图例
6、典型结构
(1)摆动液压缸(又称回转液压缸):
⏹结构:
⏹由缸体、隔板、叶片、花键套等主要部件构成。
其中叶片7固定在转子上,
用花键将转子与驱动轴连接,用螺栓2将隔板与缸体连接。
⏹工作原理:
⏹在密封的缸体内,隔板与活动叶片之间围成两个油腔,相当油缸中的无杆腔与
有杆腔。
液压力作用在活动叶片的端面上,对传动轴中心产生力矩使被驱动
轴转动。
摆动缸转角在270°左右。
(2)单自由度回转运动手腕:
⏹结构特点:
⏹机器人手部的张合就是由汽缸驱动的,而手腕的回转运动则由回转液压缸实
现。
⏹工作原理:
⏹将夹紧汽缸的外壳与摆动油缸的动片连接在一起,当摆动液压缸中不同的油
腔中进油时,即可实现手腕不同方向的摆动。
(3)双回转油缸驱动手腕:
⏹结构特点:
⏹采用双回转油缸驱动,一个带动手腕作俯仰运动,另一个油缸带动手腕作回转
运动。
⏹V-V视图表示的回转缸中动片带动回转油缸的刚体,定片与固定中心轴联结
实现俯仰运动;L-L视图表示回转缸中动片与回转中心轴联结,定片与油缸缸
体联结实现回转运动。
(4)轮系驱动的二自由度BR手腕:
⏹结构特点:
⏹由轮系驱动可实现手腕回转与俯仰运动,其中手腕的回转运动由传动轴S传
递,手腕的俯仰运动由传动轴B传递。
⏹回转运动:
轴S旋转→锥齿轮副Z1、Z2→锥齿轮副Z3、Z4→手腕与锥齿轮Z4为一体→手腕实现绕C轴的旋转运动
⏹俯仰运动:
轴B旋转→锥齿轮副Z5、Z6→轴A旋转→手腕壳体7与轴A固联→手腕实现绕A轴的俯仰运动
⏹附加回转运动:
轴S不转而B轴回转→锥齿轮Z3不转→锥齿轮Z3、Z4相啮合→迫使Z4绕C轴线有一个附加的自转,即为附加回转运动。
⏹附加回转运动在实际使用时应予以考虑。
必要时应加以利用或补偿。
(5)轮系驱动的三自由度手腕:
⏹结构特点:
⏹该机构为由齿轮、链轮传动实现的偏转、俯仰与回转三个自由度运动的手腕
结构。
⏹回转运动:
⏹轴S旋转→齿轮副Z10/Z23、Z23/Z11→锥齿轮副Z12、Z13→锥齿轮副Z14、
Z15→手腕与锥齿轮Z15为一体→手腕实现旋转运动
⏹俯仰运动:
⏹轴B旋转→齿轮副Z24/Z21,Z21/Z22→齿轮副Z20、Z16→齿轮副Z16、Z17
→齿轮副Z17、Z18→轴19旋转→手腕壳体与轴19固联→实现手腕的俯仰
运动
⏹偏转运动:
⏹油缸1中的活塞左右移动→带动链轮2旋转→锥齿轮副Z3/Z4→带动花键轴
5、6旋转→花键轴6与行星架9连在一起→带动行星架及手腕作偏转运动。