机械手腕部设计
- 格式:pdf
- 大小:760.47 KB
- 文档页数:29

机械手手腕部分的三维设计1腕部设计的基本要求(1)力求结构紧凑、重量轻腕部处于手臂的最前端,它连同手部的静、动载荷均由臂部承担。
显然,腕部的结构、重量和动力载荷,直接影响着臂部的结构、重量和运转性能。
因此,在腕部设计时,必须力求结构紧凑,重量轻。
(2)结构考虑,合理布局腕部作为机械手的执行机构,又承担连接和支撑作用,除保证力和运动的要求外,要有足够的强度、刚度外,还应综合考虑,合理布局,解决好腕部与臂部和手部的连接。
(3)必须考虑工作条件对于本设计,机械手的工作条件是在工作场合中搬运加工的棒料,因此不太受环境影响,没有处在高温和腐蚀性的工作介质中,所以对机械手的腕部没有太多不利因素。
2 腕部的结构以及选择2.1 典型的腕部结构(1) 具有一个自由度的回转驱动的腕部结构。
它具有结构紧凑、灵活等优点而被广腕部回转,总力矩M,需要克服以下几种阻力:克服启动惯性所用。
回转角由动片和静片之间允许回转的角度来决定(一般小于270°)。
(2) 齿条活塞驱动的腕部结构。
在要求回转角大于270°的情况下,可采用齿条活塞驱动的腕部结构。
这种结构外形尺寸较大,一般适用于悬挂式臂部。
(3) 具有两个自由度的回转驱动的腕部结构。
它使腕部具有水平和垂直转动的两个自由度。
(4) 机-液结合的腕部结构。
2.2 腕部结构和驱动机构的选择本设计要求手腕回转90°或180°,则腕部结构选择具有一个自由度的回转驱动腕部结构。
步进电机是一种步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
1绪论机器人是近代自动控制领域中出现的一项新技术,并已成为现代机械制造中的一个重要组成部分。
机器人显著地提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。
尤其在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用得更为广泛。
因而受到各先进工业国家的重视,投入大量人力物力加以研究和应用。
机器人一般分为三类。
第一类是不需要人工操作的通用机器人。
它是一种独立的不附属于某一主机的装置。
它可以根据任务的需要编制程序,以完成各项规定操作。
它的特点是除了具备普通机械的物理性能之外,还具备通用机械、记忆智能的三元机械。
它可以灵活运用在工业上的各个方面,如喷漆、焊接、搬运等。
第二类是需要人工操作的,称为机械机。
它起源于原子、军事工业,先是通过操作机来完成特定的作业,后来发展到用无线电讯号操作机器人来进行探测月球等。
工业中采用的锻造操作机也属于这一范畴。
第三类是专用机器人,主要附属于自动机床或自动线上,用以解决机床上下料和工件传送。
这种机器人在国外称为“Mechanical Hand ",它是为主机服务的,由主机驱动;除少数外,工作程序一般是固定的,采用机械编程。
因此是专用的。
本课题通过对通用机器人smart6.50R 的结构进行分析和研究,完成对其腕部的设计,并借助CAD/CAE软件完成从建模到运动学分析、应力分析的全过程。
最终期望腕部与小臂、手部、大臂能够协调工作,能够完成各种现代工业加工过程中所要求的动作。
本课题的设计思路是:借助已有的通用机器人的腕部设计思想和方法,综合考虑腕部机构在机器人运动中所起的作用和机器人的整体技术参数以及结构特点,然后选择合理的机构,确定传动线路,然后对机构进行分析,计算主要参数,并对部分零件进行设计、组装,综合评价腕部系统。
1.1机器人组成机器人主要由驱动装置、控制系统和执行机构三大部分组成。
1.1.1驱动装置工业机器人的驱动装置包括驱动器和传动机构两部分,它们通常与执行机构连成一体。
![工业机器人4[1].3_臂部手腕设计](https://uimg.taocdn.com/1040630169eae009581bec96.webp)

机器人手腕的设计与研究摘要:对于机器人腕部结构进行了设计和优化,取消了传统的带轮结构和单动力输入结构,采用了齿轮传动,回转和俯仰使用不同的电机驱动,从而提高了刚度、效率、灵活性和载重量,减小了空间。
关键词:齿轮,回转,俯仰,紧凑1. 机器人的定义从1920年《罗萨姆的万能机器人》的剧作中出现机器人这个词以后机器人随着时代的发展其定义也是越来越完善。
国际标准化组织(ISO)给出的机器人定义较为全面和准确,其定义如下:1.机器人的动作机构具有类似人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖人的的干预。
这些全面的定义也就决定了机器人领域必定是一个多学科、多领域交叉的领域。
其中主要的研究领域有:①机器手设计;②机器人运动学和动力学;③机器人轨迹规划;④机器人驱动技术;⑤机器人传感器;⑥机器人视觉;⑦机器人控制语言与离线编程;⑧机器人本体结构;⑨机器人控制系统;⑩智能机器人等。
涉及的学科范围主要有:①力学,主要包括工程力学、弹塑性力学、结构力学等;②机器人拓扑学,主要包括结构拓扑学即拓扑结构类型综合与优选;③机器人轨迹规划;④电子学与微电子学;⑤控制论;⑥机计算机;⑦生物学;⑧人工智能;⑨系统工程学。
2. 腕部的基本形式与特点人类的手是最灵活的肢体部分,能完成各种各样的动作和任务。
同样机器人的手部作为末端执行器是完成抓握工件或执行特定作业的重要部件,也需要有多种结构。
腕部是臂部与手部的连接部件,起支撑手部和改变手部姿势的作用。
从驱动方式上看手腕有两种形式,远程驱动和直接驱动。
直接驱动是指驱动器安装在手腕运动关节的附近直接驱动关节运动,因而传动路线短,传动刚度好,但腕部的尺寸和质量大,惯性大,由于现在技术的改进机电和传动原件都趋于小型化,这样的情况都有较大改观。
目录摘要 ..................................................................................................................... 1Abstract ........................................................................................... 错误!未定义书签。
1绪论 .. (2)1.1工业机器人简介 (2)1.2 工业机器手简介 (2)2工业机器人手腕的总体设计 (3)2.1机器人手腕总体设计概述 (3)2.2腕部的结构特点 (5)2.2.1 概述 (5)2.2.2单自由度手腕 (5)2.2.3二自由度手腕 (6)2.2.4三自由度手腕 (6)2.2.5柔顺手腕结构 (7)2.3 腕部的驱动机构 (8)2.4设计要求 (9)3 机器人手腕的机械系统设计 (10)3.1三个自由度的实现 (10)3.2传动机构的设计 (12)3.3手腕内部其他结构的设计 (13)4三维造型的绘制 (15)4.1 造型软件简介 (15)4.2典型零件的绘制 (18)结论 (44)摘要在工业上,机器人有着广泛的应用,尤其是在高温,高压,粉尘,噪音,以及带有放射性和污染的场合。
而工业机器人是相对较新的电子设备,它正开始改变现代化工业面貌。
手腕是连接末端执行器和手臂的关键,是联接手部与臂部的部件,它的作用是调整或改变工件的方位。
本设计为三自由度工业机器人手腕,可以在两个方向上旋转在一个方向上弯转。
三维造型采用的造型软件为Pro/ENGINEER, Pro/ENGINEER Wildfire野火版2.0以其易学易用、功能强大和互连互通的特点,推动了整个产品开发机构中个人效率和过程效率的提高。
它既能节省时间和成本,又能提高产品质量。

1前言1.1机器人的概念机器人是一个在三维空间中具有较多自由度,并能实现较多拟人动作和功能的机器,而工业机器人则是在工业生产上应用的机器人。
美国机器人工业协会提出的工业机器人定义为:“机器人是一种可重复编程和多功能的,用来搬运材料、零件、工具的操作机”。
英国和日本机器人协会也采用了类似的定义。
我国的国家标准GB/T12643-90将工业机器人定义为:“机器人是一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机。
能搬运材料、零件或操持工具,用以完成各种作业”。
而将操作机定义为:“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。
机器人系统一般由操作机、驱动单元、控制装置和为使机器人进行作业而要求的外部设备组成。
1.1.1操作机操作机是机器人完成作业的实体,它具有和人手臂相似的动作功能。
通常由下列部分组成:a.末端执行器又称手部,是机器人直接执行工作的装置,并可设置夹持器、工具、传感器等,是工业机器人直接与工作对象接触以完成作业的机构。
b. 手腕是支承和调整末端执行器姿态的部件,主要用来确定和改变末端执行器的方位和扩大手臂的动作范围,一般有2~3个回转自由度以调整末端执行器的姿态。
有些专用机器人可以没有手腕而直接将末端执行器安装在手臂的端部。
c. 手臂它由机器人的动力关节和连接杆件等构成,是用于支承和调整手腕和末端执行器位置的部件。
手臂有时包括肘关节和肩关节,即手臂与手臂间。
手臂与机座间用关节连接,因而扩大了末端执行器姿态的变化范围和运动范围。
d. 机座有时称为立柱,是工业机器人机构中相对固定并承受相应的力的基础部件。
可分固定式和移动式两类。
1.1.2驱动单元它是由驱动器、检测单元等组成的部件,是用来为操作机各部件提供动力和运动的装置。
1.1.3控制装置它是由人对机器人的启动、停机及示教进行操作的一种装置,它指挥机器人按规定的要求动作。
1.1.4人工智能系统它由两部分组成,一部分是感觉系统,另一部分为决策-规划智能系统。
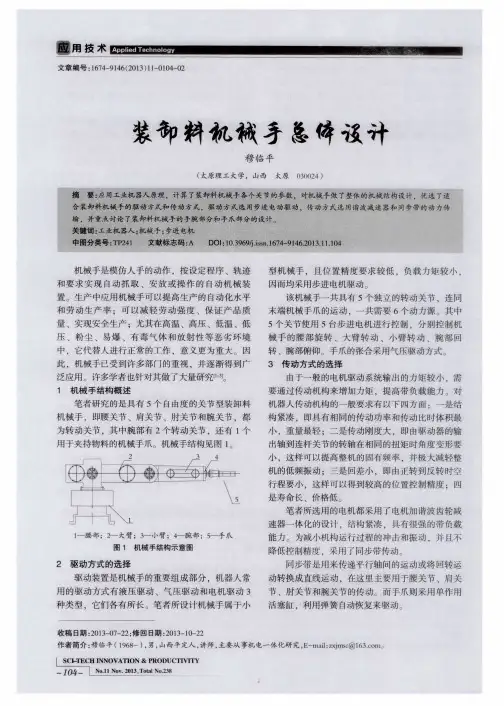
1 1前言1.1工业机器人简介工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
1.2世界机器人的发展国外机器人领域发展近几年有如下几个趋势:(1)工业机器人性能不断提高(高速度、高精度、高可靠性、便于操作和维修)(2)机械结构向模块化、可重构化发展。
例如关节模块中的伺服电机、减速机、检测系统三位一体化;由关节模块、连杆模块用重组方式构造机器人整机;国外已有模块化装配机器人产品问市。
(3)工业机器人控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构;大大提高了系统的可靠性、易操作性和可维修性。
(4)机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制;多传感器融合配置技术在产品化系统中已有成熟应用。
(5)虚拟现实技术在机器人中的作用已从仿真、预演发展到用于过程控制,如使遥控机器人操作者产生置身于远端作业环境中的感觉来操纵机器人。
(6)当代遥控机器人系统的发展特点不是追求全自治系统,而是致力于操作者与机器人的人机交互控制,即遥控加局部自主系统构成完整的监控遥控操作系统,使智能机器人走出实验室进入实用化阶段。
目录摘要 ..................................................................................................................... 1Abstract .. (2)1绪论 (3)1.1工业机器人简介 (3)1.2 工业机器手简介 (3)2工业机器人手腕的总体设计 (4)2.1机器人手腕总体设计概述 (4)2.2腕部的结构特点 (6)2.2.1 概述 (6)2.2.2单自由度手腕 (6)2.2.3二自由度手腕 (7)2.2.4三自由度手腕 (7)2.2.5柔顺手腕结构 (8)2.3 腕部的驱动机构 (9)2.4设计要求 (10)3 机器人手腕的机械系统设计 (11)3.1三个自由度的实现 (11)3.2传动机构的设计 (13)3.3手腕内部其他结构的设计 (14)4 机器人手腕的机械传动装置设计计算 (16)4.1锥齿轮12,13的设计计算 (16)4.1.1 选材料并确定初步参数 (16)4.1.2 齿面接触疲劳强度计算 (16)4.1.3 齿根抗弯疲劳强度验算 (17)4.1.4 主要几何尺寸计算 (18)4.2锥齿轮17,16的设计 (18)4.2.1选材料并确定初步参数 (18)4.2.2 齿面接触疲劳强度计算 (19)4.2.3 齿根抗弯疲劳强度验算 (20)4.2.4 主要几何尺寸计算 (21)4.3 同步带传动设计 (22)4.3.1 设计功率P (22)d4.3.2 带轮的基本尺寸 (23)5 三维造型的绘制 (24)5.1 造型软件简介 (24)5.2典型零件的绘制 (27)结论 (53)致谢 (54)参考文献 (55)摘要在工业上,机器人有着广泛的应用,尤其是在高温,高压,粉尘,噪音,以及带有放射性和污染的场合。
而工业机器人是相对较新的电子设备,它正开始改变现代化工业面貌。
摘要随着现代社会的发展,机械手和机器人是在如今社会扮演者越来越重要的角色。
自从二十世纪六十年代以后,半导体及电子技术的迅猛发展,使得人们的生活开始进入电器时代,并且也随着电子计算机的发展,使得机械设计迎来了巨大的革命,跟随电子发展热潮,机械手和机器人的发展也越发往自动化方向发展。
这次设计是对机械手腕部进行结构设计和分析等相关研究,完成对其整体装置以及相关部件的分析研究及设计,与此同时通过借助CAD软件对其进行二维设计及绘制装配图及相关零件图,以此来增加对图形的理解以及增强软件的应用能力。
通过此次设计,希望设计的机械手腕部能够与机械手、机械臂完成相应配合,从而能够在生产制造业得到应用。
关键词:机械手腕部;工作装置;电动机AbstractWith the development of modern society, robots and robots are playing an increasingly important role in today's society. Since the 1960 s, the rapid development of semiconductor and electronic technology, makes the life of people begin to enter electric era, and also with the development of the electronic computer, the mechanical design has resulted in a huge revolution, with electronic development boom, and the development of robot manipulator is also increasingly in the direction of automation development. Is the design of robot wrist structure design and analysis of related research, complete analysis of the whole device and related components research and design, at the same time by using CAD software for 2 d design and draw the assembly drawing and related parts graph, in order to increase the understanding of graphics and enhance software application ability. Through this design, the design of the manipulator wrist can be matched with the manipulator and manipulator, so that it can be applied in the manufacturing industry.Keywords : The wrist of the manipulator; Working device; motor;目录引言 (1)第一章绪论 (2)1.1机器人简介 (2)1.2 机械手简介 (2)1.3 国内机械手的发展动态和研究现状 (3)第二章总体设计 (4)2.1机械手腕的总体设计及其自由度 (4)2.2 总体设计的内容及设计原则 (5)2.3机械手腕的特点 (5)2.4机械手腕的系统设计 (5)2.4.1四个自由度的设计 (5)2.4.2机械手腕传动机构的设计 (6)2.5机械手腕部设计的机构设计特点 (6)第三章机械手腕部传动机构设计计算 (8)3.1 俯仰运动传动机构的设计 (8)3.1.1俯仰电动机类型与结构的选取 (8)3.1.2所选电机的有关参数的计算 (8)3.1.3步进电机型号的确定 (8)3.1.4俯仰运动传动装置的设计 (9)3.2 偏转运动传动机构的设计 (14)3.2.1偏转电动机类型与结构的选取 (14)3.2.2所选电机的有关参数的计算 (14)3.2.3步进电机型号的确定 (15)3.2.4偏转运动传动装置的设计 (15)3.2.5偏转运动中偏转齿轮的设计 (17)3.3 旋转运动传动机构的设计 (20)3.3.1旋转运动电动机的选择 (20)3.3.2选取电机的相关参数的计算 (20)3.3.3旋转运动传动装置的设计 (21)3.4 平移运动传动机构的设计 (24)3.4.1平移运动电动机的选择 (24)3.4.2所选电机的有关参数的计算 (24)3.4.3平移运动传动装置的设计 (25)第四章机械手腕部轴及轴承设计计算 (28)4.1俯仰运动中轴的设计 (28)4.2偏转运动中蜗杆轴的设计 (29)4.3偏转运动中蜗轮轴的设计 (32)第五章机械手腕部运动仿真 (36)总结 (40)参考文献 (41)致谢 (42)引言在现代社会中,机械已经完完全全融入到了我们的生活,其已经在物理、生物、化工、医学等方面起到了重要的作用,不仅如此,在生产制造业已经成为不可或缺的角色,因此我们的生活因为有了机械而变得越来越方便。
机械手腕部设计范文机械手是一种模仿人手的机械装置,广泛应用于工业生产线上的自动化操作。
机械手通常由机械臂和手腕部组成,其中手腕部起着连接机械臂与末端执行器的作用。
手腕部的设计对机械手的动作能力和精度有着重要影响。
机械手腕部主要由关节、传感器和执行器组成。
关节是连接机械臂和手腕的部分,通常由旋转关节和弯曲关节组成。
旋转关节使机械手能够在水平方向上旋转,而弯曲关节则使机械手能够在垂直方向上弯曲。
关节的设计需要考虑到承载能力、阻尼控制和位置精度等因素。
传感器在机械手腕部起到了非常重要的作用。
通过传感器可以实时获取机械手的位置、姿态和力量等信息,从而实现更加精确的控制。
常用的传感器有位置传感器、力矩传感器和视觉传感器。
位置传感器用于测量关节的位置,力矩传感器用于测量关节所施加的力矩,而视觉传感器可以通过图像识别实现对目标物体的抓取。
执行器是机械手腕部的输出部分,通过执行器可以实现对机械手的运动控制。
常见的执行器有电机和液压缸。
电机驱动机械手的旋转和弯曲动作,而液压缸则可以实现更大的力矩输出。
根据实际需要,执行器的选型需要考虑到输出力矩、响应速度和能耗等因素。
除了上述基本组成部分,机械手腕部还需要考虑到人机交互性和安全性等因素。
人机交互性指的是机械手腕部与操作人员之间的交互,包括界面设计和操作逻辑等方面。
安全性是指机械手腕部在工作过程中的安全保护措施,如急停装置和限位开关等。
在设计机械手腕部时,需要充分考虑到工作环境和任务需求。
工作环境包括空间限制、温度要求和清洁程度等方面,而任务需求则包括工作范围、负载能力和定位精度等方面。
根据这些要求,可以选择合适的关节结构、传感器和执行器等。
总结起来,机械手腕部设计需要考虑到关节、传感器和执行器等部分的协调配合,同时还需要兼顾人机交互性和安全性等因素。
通过合理的设计,可以实现机械手腕部对于工业生产的快速、准确和安全的操作。