电机双环控制实例
- 格式:doc
- 大小:1.36 MB
- 文档页数:4

电机电子系统计算机控制与仿真学院:信息工程学院专业班级:电机与电器学生姓名:仪轩杏学号: 406107016001指导老师:张景明异步电机的双闭环控制引言矢量控制是目前交流电机的先进控制方式, 一般将含有矢量变换的交流电机 控制都称之为矢量控制, 实际上只有建立在等效直流机模型上, 并按转子磁场准 确定向的控制,电机才能获得最优的动态性能。
2 基本原理矢量控制的基本思路是以产生相同的旋转磁动势为准则, 将异步电机在静止 三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电 流,分别加以控制,以达到直流电机的控制效果。
异步电机在两相同步旋转坐标系上的数学模型为:Te n p L m i st i sm i sm i rt当两相同步旋转坐标系按转子磁链定向时,应有 rm r , rt 0,即得其中, w e 为同步转速, w r 为转子角频率, w s 为转差角速度, T r 为转子时间 常数,n p 为极对数, R s 、R r 为定子、转子电阻, L s 、L r 、L m 为定子、转子电感及 定转子之间的互感, p 为微分算子, ψr 为转子磁链。
usmR s pL se L s pL m e Lmuste L s R s pL se L m pL m urmpL me LmR r pL rs L r urts1L mpL ms1L rR r pL rsm strmrtL m 0 TenpL mLri stLm1 pT r L mT r rismists0 Lm0 i smL m 0 L r i stirm i rt i smist irmi rt0 L s 0 L m3系统原理带转矩内环的转速、磁链闭环矢量控制系统的电气原理如图 1 所示。
在图 1 中,主电路采用了电流滞环控制型逆变器。
在控制电路中,在转速环后增加了转矩控制内环,转速调节器ASR的输出是转矩调节器ATR的给定Te*,而转矩的反馈信号Te,则通过矢量控制方程计算得到的。


电机的双闭环控制系统
什么是电机的双闭环控制系统?
为了分别控制生产线的速度和张力,一般电机均采用双闭环控制系统(如图)。
双闭环控制系统
实现了转速和电流两种负反馈控制,在系统中设置了转速PID
自动调节器和电流PID自动调节器,两者之间实现串联。
即把转速调节器的输出作为电流调节器的输入,再用电流调节器的输出去控制逆变桥晶闸管的触发装置。
从闭环结构上看,电流调节环在里面,叫内环;转速调节环在外面,叫外环。
转速调节和电流调节在生产线上就是速度控制模式和张力控制模式。
对于张力辊,采用张力控制模式,这时人为地将转速自动调节器处于开环状态,不起调节作用,而将所需要产生的张力折算成额定转矩的百分比,作为转矩限幅器的限幅给定,电流调节器处于饱和状态。
对于速度基准辊,采用速度控制模式,将所需要的钢带线速度折算成电机额定转速的百分比,作为转速调节器的速度给定,并同时将所需要产生的张力折算成电机额定转矩的百分比,作为转矩限幅器的限幅给定。
张力辊在未建张爬行时开卷机在未建张送板时,也是速度控制模式。
工作模式由程序控制系统自动进行切换。
【本文档内容可以自由复制内容或自由编辑修改内容期待你的好评和关注,我们将会做得更好】。

课程名称:电机控制指导老师:成绩:实验名称:双闭环晶闸管不可逆直流调速系统实验类型:同组学生姓名:一、实验目的和要求(必填)二、实验内容和原理(必填)三、主要仪器设备(必填)四、操作方法和实验步骤五、实验数据记录和处理六、实验结果与分析(必填)七、讨论、心得一、实验目的和要求(1)了解双闭环不可逆直流调速系统的原理、组成以及各主要单元部件的原理(2)掌握双闭环不可逆直流调速系统的调速步骤、方法以及参数的整定(3)研究调节器参数对系统动态特性的影响二、实验内容和原理1.实验内容(1)各控制单元调试(2)整定电流反馈系数β、转速反馈系数α(3)测定开环机械特性及高、低速时完整的系统闭环静态特性(4)闭环控制特性的测定(5)观察、记录系统动态波形2.实验原理实验电路图如下图所示:双闭环晶闸管不可逆直流调速系统欧电流和转速两个小姐诶器综合调节。
由于调速系统的主要参量为转速,故转速环作为主环放在外面,电流环作为副环放在里面,这样可以抑制电网电压扰动对转速的影响。
系统工作时,先给电动机家里次,改变给定电压Ug的大小,即可方便地改变电机的转速、ASR、ACR均设有限幅环节,ASR的输出作为ACR的给定,利用ASR的输出限幅可以达到限制起动电流的目的,ACR 输出作为移相触发电路GT的控制电压,利用ACR的输出限幅可以达到限制αmin的目的起动时,当加入给定电压Ug之后,ASR输出饱和,使电动机以限定的最大起动电流加速起动,直到电机转速达到了给定转速,并且出现了超调后,ASR退出饱和,最后稳定运行在略低于给定转速的数值上。
在转速、电流双闭环系统中,速度调节器的作用:用于对电机转速进行控制,以保障:①调速精度,做到静态无差;使机械特性硬,满足负载要求。
②实现转速快速调节。
电流调节器的作用:实现对电流的控制,以保障:①精确满足负载转矩大小要求(通过电流控制);②调速的快速动态特性(转矩的快速响应)。
三、主要仪器设备MCL现代运动控制技术实验台主控屏、直流电动机——测功机——测速发电机组、给定、零速封锁器、速度变换器、速度调节器、电流调节器组件挂箱、双踪记忆示波器、数字式万用表四、操作方法和实验步骤1.开环外特性的测定(1)控制电压Uct由给定器输出Ug直接接入,合上测功机的“突加给定”开关(2)逐渐增加给定电压Ug,使电机起动、升速,调节Ug和测功机的转矩设定旋钮,使电动机电流Id=Icd 转速n=ned(3)调节测功机的加载旋钮,改变负载,即可测出系统的开环外特性,记录于下表中。
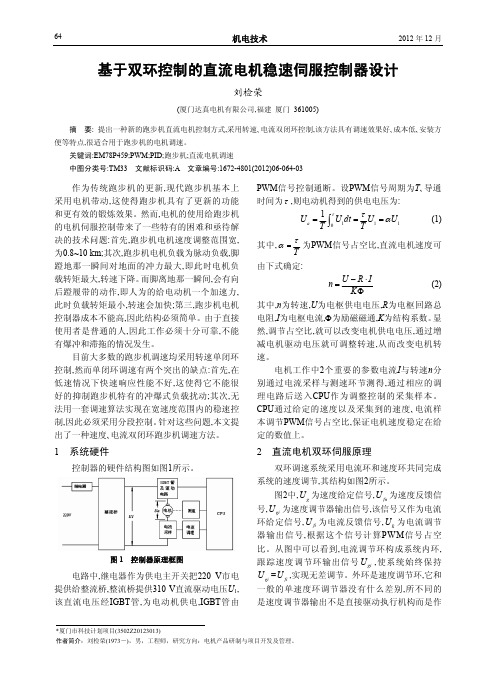
直流电机的转速电流双闭环控制摘要:本设计主要采用模拟电路实现直流电机控制的整流电源,转速调PI调节器,电流PI调节器的设计。
来实现对电机转速的控制,包括快速起动、恒速运行、堵转截止三大目标。
该设计的主要电路均采用模拟电路实现,电流环的PI调节器用于保证快速起动,即保证电机起动时以最大负载电流起动,也即实现以最大加速度实现。
而转速调节器则用于在运行时实现转速恒定,保证带负载的能力。
两个PI 调节器都采用集成运放实现。
其主要优点是克服传统意义上单环控制只能满足一方面的要求的缺陷。
关键词:电流环;转速环;PI调节器The Rotate Speed and Current Double Closed LoopFeedback Control for DC Motor Abstract: The major tasks of this design is utilizing simulating circuits to produce the rectifiering power source ,current PI regulator and rotate speed PI regulator for the DC motor.The major object of thisdesigen is making the DC motor started rapidly,rotating stably.yields making the DC motor started rapidly with the largest load current.It is the same to starting rapidly with the largest accerelation.Simultaneous,The rotate speed PI regulator make the DC mortor retated stably to any the change of the load .Both of the PI regulatorsuse the integrated amplifier operator to accomplish the task.The priority of this design are overcoming the defect of traditional single feedback loop.Key word:current feedback loop; rotate speed feedback loop;PI regulator目录摘要.............................................................................................1 1引言.............................................................................................错误!未定义书签。
实验指导书“双闭环控制直流电动机调速系统”数字仿真实验一、实验目的1.熟悉Matlab/Simulink仿真环境;2.掌握Simulink图形化建模方法;3.验证“直流电动机转速/电流双闭环PID控制方案”的有效性。
二、实验内容1.“双闭环直流电动机调速系统”的建模2.电流环/调节器设计3.电流环动态跟随性能仿真实验4.转速环/调节器设计5.转速环动态抗扰性能仿真实验6.系统动态性能分析(给出仿真实验结果与理论分析结果的对比/分析/结论)三、实验步骤1、系统建模A.控制对象的建模建立线性系统动态数学模型的基本步骤如下:(1)根据系统中各环节的物理定律,列写描述据该环节动态过程的微分方程;(2)求出各环节的传递函数;(3)组成系统的动态结构图并求出系统的传递函数。
下面分别建立双闭环调速系统各环节的微分方程和传递函数。
B.额定励磁下的直流电动机的动态数学模型图1给出了额定励磁下他励直流电机的等效电路,其中电枢回路电阻R 和电感L 包含整流装置内阻和平波电抗器电阻与电感在内,规定的正方向如图所示。
图1 直流电动机等效电路由图1可列出微分方程如下:0dd d dI U RI LE dt=++ (主电路,假定电流连续) e E C n = (额定励磁下的感应电动势)2375e L GD dnT T dt-=⋅ (牛顿动力学定律,忽略粘性摩擦)e m d T C I = (额定励磁下的电磁转矩)定义下列时间常数:l LT R=——电枢回路电磁时间常数,单位为s ;2375m e mGD R T C C =——电力拖动系统机电时间常数,单位为s ; 代入微分方程,并整理后得:0()dd d ldI U E R I T dt -=+ m d d L T dE I I R dt-=⋅ 式中,/dL L m I T C =——负载电流。
在零初始条件下,取等式两侧得拉氏变换,得电压与电流间的传递函数0()1/()()1d d l I s R U s E s T s =-+(1)电流与电动势间的传递函数为()()()d dL m E s R I s I s T s=-(2)d Ua) b)Uc)图2 额定励磁下直流电动机的动态结构图 a) 式(1)的结构图 b)式(2)的结构图c)整个直流电动机的动态结构图C .晶闸管触发和整流装置的动态数学模型在分析系统时我们往往把它们当作一个环节来看待。
目录一、仿真实验目的和要求 (3)二、仿真实验内容 (3)三、仿真步骤与结果分析 (4)1. 各个模块功能介绍 (4)(1)速度给定模块 (4)(2)转矩给定模块 (5)(3)速度控制模块 (7)(4)电流控制模块 (8)(5)PWM波生成模块 (11)(6)滤波模块 (13)(7)测量模块 (15)(8)直流电机模块 (16)2. 仿真结果分析 (19)(1)恒转速、恒转矩输入 (19)(2)恒转速、阶跃转矩输入 (20)(3)阶跃转速、恒转矩输入 (21)(4)阶跃转速、阶跃转矩 (22)(5)增大给定转速 (22)(6)减小给定转速 (23)(7)增大给定转矩 (23)(8)减小给定转矩 (24)3. 转速PI调节器参数对电机运行性能的影响 (25)(1)增大比例系数Kp (25)(2)减小比例系数Kp (25)(3)增大积分系数Ki (26)(4)减小积分系数Ki (27)4. 电流调节器改用PI调节器仿真 (27)5. 加入位置闭环控制 (31)6. 速度无超调 (34)四、实验心得、体会 (35)电机控制大作业:直流电机双闭环控制调速系统一、仿真实验目的和要求1.加深对直流电机双闭环PWM调速模型的理解2.学会利用MATLAB中的SIMULINK工具进行建模仿真3.掌握PI调节器的使用,分析其参数对电机运行性能的影响。
二、仿真实验内容图1 直流电机双闭环控制调速系统原理图实验电路图如上图所示,实验要求(*为必做实验):1.描述每个模块的功能(*)2.仿真结果分析:包括速度改变、转矩改变下的电机运行性能,并解释响应现象(*)3.转速PI调节器参数对电机运行性能的影响(*)4.电流调节器改用PI调节器(*)5.加入位置闭环6.速度无超调三、仿真步骤与结果分析1.各个模块功能介绍(1)速度给定模块图2 速度给定模块原理图速度给定模块通过一个单刀双掷开关控制,分为两种方式:一种为恒速度给定,一种为阶跃速度给定。
《运动控制系统》课程设计指导书一、课程设计的主要任务(一)系统各环节选型1、主回路方案确定。
2、控制回路选择:给定器、调节放大器、触发器、稳压电源、电流截止环节,调节器锁零电路、电流、电压检测环节、同步变压器接线方式(须对以上环节画出线路图,说明其原理)。
(二)主要电气设备的计算和选择1、整流变压器计算:变压器原副方电压、电流、容量以及联接组别选择。
2、晶闸管整流元件:电压定额、电流定额计算及定额选择。
3、系统各主要保护环节的设计:快速熔断器计算选择、阻容保护计算选择计算。
4、平波电抗器选择计算。
(三)系统参数计算1、电流调节器ACR 中i i R C 、 计算。
2、转速调节器ASR 中n n R C 、计算。
3、动态性能指标计算。
(四)画出双闭环调速系统电气原理图。
使用A1或A2图纸,并画出动态框图和波德图(在设计说明书中)。
二、基本要求1、使学生进一步熟悉和掌握单、双闭环直流调速系统工作原理,了解工程设计的基本方法和步骤。
2、熟练掌握主电路结构选择方法,主电路元器件的选型计算方法。
3、熟练掌握过电压、过电流保护方式的配置及其整定计算。
4、掌握触发电路的选型、设计方法。
5、掌握同步电压相位的选择方法。
6、掌握速度调节器、电流调节器的典型设计方法。
7、掌握电气系统线路图绘制方法。
8、掌握撰写课程设计报告的方法。
三、 课程设计原始数据有以下四个设计课题可供选用:A 组:直流他励电动机:功率P e =1.1KW ,额定电流I e =6.7A ,磁极对数P=1,n e =1500r/min,励磁电压220V,电枢绕组电阻R a =2.34Ω,主电路总电阻R =7Ω,L ∑=246.25Mh(电枢电感、平波电感和变压器电感之和),K s =58.4,机电时间常数T m =116.2ms ,滤波时间常数T on =T oi =0.00235s ,过载倍数λ=1.5,电流给定最大值10V U im =*,速度给定最大值 10V U n=* B 组:直流他励电动机:功率P e =22KW ,额定电压U e =220V ,额定电流I e =116A,磁极对数P=2,n e =1500r/min,励磁电压220V,电枢绕组电阻R a =0.112Ω,主电路总电阻R=0.32Ω,L ∑=37.22mH(电枢电感、平波电感和变压器电感之和),电磁系数C e =0.138 Vmin /r ,K s =22,电磁时间常数T L =0.116ms ,机电时间常数T m =0.157ms ,滤波时间常数T on =T oi =0.00235s ,过载倍数λ=1.5,电流给定最大值 10V U im=*,速度给定最大值 10V U n=* C 组:直流他励电动机:功率Pe =145KW ,额定电压Ue=220V ,额定电流Ie=733A,磁极对数P=2,ne=430r/min,励磁电压220V,电枢绕组电阻Ra=0.0015Ω,主电路总电阻R =0.036Ω,Ks=41.5,电磁时间常数TL=0.0734ms ,机电时间常数Tm=0.0926ms ,滤波时间常数Ton=Toi=0.01s ,过载倍数λ=1.2,电流给定最大值 8V U im =*,速度给定最大值 10V U n =*D 组:直流他励电动机:功率Pe =145KW ,额定电压Ue=220V ,额定电流Ie=6.5A,磁极对数P=1,ne=1500r/min,励磁电压220V,电枢绕组电阻Ra=3.7Ω,主电路总电阻R =7.4Ω,Ks=27,电磁时间常数TL=0.033ms ,机电时间常数Tm=0.26ms ,滤波时间常数Toi=0.0031s ,Ton=0.01s ,过载倍数λ=1.5,电流给定最大值8V U im =*,速度给定最大值 10V U n =*,β=0.77V/A ,α=0.007 Vmin /r双闭环直流电机调速系统设计参考案例第一章 绪 论1.1 直流调速系统的概述三十多年来,直流电机调速控制经历了重大的变革。
“双闭环控制直流电动机调速系统”数字仿真实验24、SIMULINK建模我们借助SIMULINK,根据上节理论计算得到的参数,可得双闭环调速系统的动态结构图如下所示:图7 双闭环调速系统的动态结构图(1)系统动态结构的simulink建模①启动计算机,进入MATLAB系统检查计算机电源是否已经连接,插座开关是否打开,确定计算机已接通,按下计算机电压按钮,打开显示器开关,启动计算机。
打开Windows开始菜单,选择程序,选择MATAB6.5.1,选择并点击MATAB6.5.1,启动MATAB程序,如图8,点击后得到下图9:图8选择MATAB程序图9 MATAB6.5.1界面点击smulink 中的continuous,选择transfor Fc n(传递函数)就可以编辑系统的传递函数模型了,如图10。
图10 smulink界面②系统设置选择smulink界面左上角的白色图标既建立了一个新的simulink模型,系统地仿真与验证将在这个新模型中完成,可以看到在simulink目录下还有很多的子目录,里面有许多我们这个仿真实验中要用的模块,这里不再一一介绍,自介绍最重要的传递函数模块的设置,其他所需模块参数的摄制过程与之类似。
将transfor Fc n(传递函数)模块用鼠标左键拖入新模型后双击transfor Fc n(传递函数)模块得到图11,开始编辑此模块的属性。
图11参数表与模型建立参数对话栏第一和第二项就是我们需要设置的传递函数的分子与分母,如我们需要设置电流环的控制器的传递函数:0.01810.0181()0.2920.0180.062ACR s s W s s s++=⋅=,这在对话栏的第一栏写如:[0.018 1],第二栏为:[0.062 0]。
点击OK ,参数设置完成。
如图12。
图12传递函数参数设置设置完所有模块的参数后将模块连接起来既得到图7所示的系统仿真模型。
在这里需要注意的是,当我们按照理论设计的仿真模型得到的实验波形与理想的波形有很大的出入。
直流电机转速电流双闭环调速系统实验
一、 实验目的
通过实验了解直流调速系统的原理及一般组成结构,会设计并调节速度电流双闭环PID 参数。
二、 实验系统结构
本系统由以下模块构成:
DSP2407以及相应的接口电路构成的控制板卡一块
电机驱动板卡一块
直流电机一个
负载轮一个
计算机一台
DSP 仿真器一个
图1 系统结构框图
图2 根据图1设计的DSP 控制板(带驱动板,可直接控制直流电机)
图3 系统组成
速度电流双闭环PID控制的程序结构如图:
提供DSP编程的编译环境,寄存器等相应设置配置完成,只需要学员自己
写PID控制程序。
图5 程序编程环境
三、实验要求
掌握直流电机的基本构成机原理、掌握利用PWM调速的原理、掌握数字PID的原理及应用、掌握双闭环调速的原理、掌握直流调速系统的构成、掌握DSP控制系统的原理及构成。
四、实验步骤
1、调节PWM占空比,观测电机电流值的变化情况。
调节DSP2407程序中的PWM占空比参数值,通过电流传感器采集电机的电流,经过A/D以后进行观察。
目的:了解对电机调速,实际就是改变PWM控制的占空比,改变直流电机的电流,从而改变直流电机的速度。
2、取消电流反馈,以单闭环PID控制电机速度。
以光电码盘数据计算的速度为反馈,设计一个数字PID控制器,控制电机以一定的速度转动。
3、速度电流双闭环控制。
加入电流反馈,设计双闭环的PID速度电流控制器。
4、位置、速度、电流三环PID控制。
加入位置控制环,设计上升下降曲线,使电机准确可靠运行。
五、实验评分
利用DSP编译器对变量的记录,可以方便显示PID算法的响应结果图,
根据响应曲线的特性,对PID算法的好坏进行评价。
六、 其他功能
a 、 还具备与计算机通过RS232的通讯功能,可考学员DSP 与计算机的
通讯设计及编程设计。
b 、具有A/D 功能,可考察DSP 的AD 转换原理与配置使用。
c 、 DSP 控制板还可以接不进电机驱动器,控制步进电机。
考察步进电
机的原理,使用及控制。
图6电流响应曲线
图7速度响应曲线。