主从式带电作业机器人控制系统
- 格式:pdf
- 大小:548.14 KB
- 文档页数:4
带电作业机器人控制系统摘要:带电作业机器人是针对配电线路带电作业而研制开发的一种安全、可靠的带电作业设备.为了提高带电作业的自动化水平和安全性,减轻操作人员的劳动强度和强电磁场对操作人员的人身危害,从上世纪80年代起许多国家都开展了带电作业机器人的研究,本文分析了带电作业机器人控制系统研究。
关键词:带电作业;机器人随着国民经济的发展和科学技术的不断进步,机器人已在许多领域得到了广泛应用.在电力系统带电作业工作中,作业对象复杂、多样,作业环境要求苛刻、危险系数高,为了减轻操作人员高空作业的劳动强度和强电磁场对操作人员的人身威胁,研制一种适用于带电作业的主从式带电作业机器人具有重要意义.一、系统介绍带电作业机器人系统主要是由主手、液压机械臂(从手)、曲臂式液压升降车(带有升降平台)、通讯系统等几部分组成,如图1所示。
作业时,操作人员将作业车开到作业地点,控制升降机构将液压机械臂升到输电线路附近,根据带电作业任务,操作人员在车内操控主手,液压机械臂跟随主手运动,夹取不同的带电作业工具完成作业。
主手与液压机械臂同构,有腰部回转、大臂俯仰、小臂俯仰、腕部俯仰、腕部摇摆、腕部回转和手爪开合七个自由度。
每个关节中安装力矩电机和电位计,用来控制主手各关节运动并检测运动信息。
液压机械臂主要依赖分布在七个关节中的驱动单元完成作业任务,其运动性能直接取决于液压系统性能。
液压机械臂的每个关节中安装电位计,用于检测液压缸驱动各关节运动后的关节旋转角度。
由于驱动单元为液压执行器件,只要能控制液压执行器件的运动,就可以决定带电作业机器人的整体运动。
曲臂式液压升降车由履带式车辆底盘、三自由度升降机构和移动作业平台构成。
履带式车辆底盘采用电机驱动,发动机的动力经传动系传给驱动轮,驱动轮得到驱动扭矩使车辆向前行驶。
升降机构采用新型优质型钢,强度高、重量轻,采用液压驱动,移动作业平台载重大,可搭载一定的设备;三自由度的设计可使工作台升高或延伸,还可360度旋转,易于跨越障碍物到达工作位置进行多点作业。
南京理工大学科技成果——全自主带电作业机器人系统
成果简介:
针对目前机器人无法在非结构化环境下完成自主带电作业任务的现状,将视觉图像处理技术、遥操作技术、虚拟现实技术、人机交互技术、多级绝缘防护技术等与机器人技术相融合,研发完成了更加自主的带电作业机器人系统,可实现在非结构化环境下完成高压线路的带电更换避雷器、拆接引线等作业任务,有效地代替人工作业,提高作业的安全性和效率,满足机器人配电网带电作业的要求,提高电网的运行质量的同时,还可减少供电系统中的人员投入,降低劳动人员成本,使经济效益和社会效益得到最大化。
技术指标:
可自主完成复杂的更换避雷器以及接搭引线等作业任务。
项目水平:国内领先
成熟程度:样机
合作方式:合作开发。
主从遥操作机器人系统在配网带电作业中的应用设计摘要:配网带电作业属于高危工作,随着科技的发展,使用机器人替代工人直接接触电网成为可能。
为制造出一款适用于配网带电作业的机器人,本文开发了一套拥有力觉临场感的主从遥操作系统与之匹配。
研发该系统分为两步:第一,依照ROS开发遥操作系统软件;第二,构成主从臂之间的位姿映射模型。
最后对样机进行模拟实验。
关键词:配网带电作业机器人;主从异构型遥操作;逆运动学1 引言因为配电网负载相对集中、接线复杂、占地面积小,所以配网工作人员必须克服绝缘负荷重、操作检修空间局限性大、高温等问题。
如果制造出配网带电作业机器人,就可以替代人工操作避免人员伤亡,未来配网运营维护也必然会有大量这种机器人投入使用。
在此基础上,本文提出一种异构型主从遥操作机器人的逆运动学求解方法,完成了实验室环境下的系统试验。
2 遥操作系统软件构架本文依照ROS点对点的传讯原理,开发了主从遥操作系统程序。
系统程序是由力觉传感、主臂、从臂3个子系统组成。
(1)主臂子系统主臂子系统有两个功能,第一个是收集主臂末端位置姿态信息,经滤波处理后传导至主控器,第二个是主控器接收从臂末端传来的受力信息并将受力情况映射到主臂末端。
(2)从臂子系统从臂子系统有两个功能,第一个是对应主臂末端位置姿态改变情况实现从臂同步动作,第二个是收集从臂关节角度信息,运算并且传导从臂末端位置姿态信息。
(3)力觉传感子系统力觉传感子系统能够实现收集从臂末端与物体触碰时产生的力以及力矩,并将其转化为信息同步传导给主臂的要求。
图1为机器人操作系统平台下力觉传感子系统结构与信号流。
图13 逆运动学求解方法开发异构型主从遥操作机器人的关键步骤是构建从臂末端与主臂末端之间的位姿映射模型,图2就是该思路下设计的主臂、从臂模型结构示意图。
本文将机械主臂、从臂的末端位置姿态分别建立对应关系,实现了对六自由度机器人的逆运动学问题的分解,将其成功转换成两个三自由度逆运动学问题。

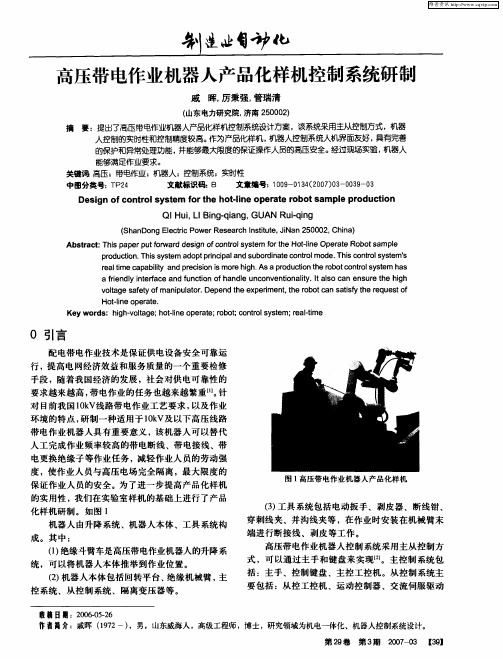
第29卷第3期2007-03【39】高压带电作业机器人产品化样机控制系统研制戚 晖, 厉秉强, 管瑞清(山东电力研究院, 济南 250002)摘要:提出了高压带电作业机器人产品化样机控制系统设计方案,该系统采用主从控制方式,机器人控制的实时性和控制精度较高。
作为产品化样机,机器人控制系统人机界面友好,具有完善的保护和异常处理功能,并能够最大限度的保证操作人员的高压安全。
经过现场实验,机器人能够满足作业要求。
关键词:高压; 带电作业; 机器人; 控制系统; 实时性中图分类号:TP24文献标识码:B 文章编号:1009-0134(2007)03-0039-03Design of control system for the hot-line operate robot sample production QI Hui, LI Bing-qiang, GUAN Rui-qing (ShanDong Electric Power Research Institute, JiNan 250002, China)Abstract: This paper put forward design of control system for the Hot-line Operate Robot sampleproduction. This system adopt principal and subordinate control mode. This control system'sreal time capability and precision is more high. As a production the robot control system hasa friendly interface and function of handle unconventionality. It also can ensure the highvoltage safety of manipulator. Depend the experiment, the robot can satisfy the request ofHot-line operate.Key words: high-voltage; hot-line operate; robot; control system; real-time收稿日期:2006-05-26作者简介:戚晖(1972-),男,山东威海人,高级工程师,博士,研究领域为机电一体化、机器人控制系统设计。
主从式机器人的系统控制策略摘要:本文主要针对主从式机器人的系统控制策略展开了探讨,对机器人的控制作了详细的阐述,并为主从式机器人的控制策略及解算作了系统的分析,以期能为有关方面的需要提供有益的参考和借鉴。
关键词:主从式机器人;系统;控制策略0 引言随着科学信息技术的不断应用发展,主从式机器人系统的应用也得到了相应的创新进步。
然而在真正的应用过程中,若要进一步掌握主从式机器人的系统,就必须要采取有效的策略做好系统的控制。
基于此,本文就主从式机器人的系统控制策略进行了探讨,相信对有关方面的需要能有一定的帮助。
1 机器人控制从工业机器人的系统构成来看,大致可以分为动作部分、检测部分和控制部分,如图1所示。
动作部分相当与机器人手臂、腕部、手指和行走机构足等具有动作功能的部分;检测部分是获得来自于操作对象物、机器人自身以及环境的种种信息,并对其作信息处理来认识对象物,感知自身状态和识别环境的部分;控制部分是基于来自检测等部分的信息,为了使动作部分完成目标操作所承担的控制功能的部分。
图1 机器人系统1.1 机器人控制方式机器人控制器是一个计算机控制系统,它包含高性能计算机,与机器人运动学和动力学建模有密切联系,并以机器人控制技术为理论。
机器人控制器有多种不同控制策略,有非伺服(开环)控制、伺服控制、基于传感信息的控制、最优PID控制、非线性反馈的动态补偿控制、自适应控制、变结构(滑模)控制、模糊控制、分级分散的多臂(或多机器人)协调控制等,但目前实用的多数还是PID伺服控制。
1.2 机器人控制的主要控制变量一台机器人的各关节控制变量。
X(t)表示末端执行装置在空间的实时位置。
只有当关节θ1~θ6移动时,X才变化。
用矢量θ(t)来表示关节变量θ1至θ6。
各关节在力矩C1~C6作用下而运动,这些力矩构成矢量C(t);矢量C (t)由各传动电动机的力矩矢量T(t)经过变速机送到各个关节。
这些电动机在电流或电压矢量V(t)所提供的动力作用下,在1台或多台微处理机的控制下,产生力矩T(t)。
带电作业机器人控制系统吕骁;鲁守银;曹端江【摘要】The Hot-line Work Robot is a safe,reliable,live working equipment developed for distribution live line work.System compositions of Robot and hardware and software implementation of the motion control system are introduced in detail.Finally,the paper introduces the system's position servo control and force position control in particular,and compares two control methods of position tracking through the MATLAB simulation.Simulation curve proves that hybrid control method of force and position is better than position control.%带电作业机器人是针对配电线路带电作业而研制开发的一种安全、可靠的带电作业设备.介绍了带电作业机器人系统组成,运动控制系统的软硬件实现,最后详细介绍了系统的位置伺服和力/位置混合控制,并且通过MATLAB仿真对两种控制方法进行了位置跟踪比较,仿真曲线证明带有力反馈的控制效果更佳.【期刊名称】《计算机系统应用》【年(卷),期】2013(022)004【总页数】4页(P23-26)【关键词】带电作业;机器人;位置跟踪;MATLAB仿真【作者】吕骁;鲁守银;曹端江【作者单位】山东建筑大学信息与电气工程学院,济南 250101;山东建筑大学信息与电气工程学院,济南 250101;山东建筑大学信息与电气工程学院,济南 250101【正文语种】中文配电带电作业技术是保证供电设备安全可靠运行、提高电网经济效益和服务质量的一个重要检修手段. 目前, 我国的带电作业方式仍是人工带电作业, 操作人员作业时处于高电压、高空环境中, 作业条件恶劣, 容易引发人身伤亡事故. 因此, 研制一种适用于10 kV 高压线路带电作业的机器人具有重要意义.带电作业机器人是集高压绝缘、机械、液压、控制与计算机技术等学科于一体的高技术产品. 国外在该领域的研究起步较早, 日本是研究成果和使用化程度都比较好的国家之一. 日本于 1984 年开始高压带电作业机器人的研究, 仅九州地区已有100 多台带电作业机器人在现场工作, 目前, 日本带电作业机器人研究已经进入第3代[1]. 西班牙、美国、加拿大也在20世纪80年代中期开展了这方面的研究.在我国, 由于对配电可靠性的要求越来越高, 对带电作业机器人的需求也越来越强烈. 山东电力科学研究院于2002年11月研发出第一台试验室样机, 2003年开始产品化样机的研究, 2005年完成产品化样机的研究. 2011年6月完成山西长治10KV带电作业机器人实用化研究[1,2].1 带电作业机器人系统组成高压带电作业机器人主要由力反馈主手、控制单元、液压和伺服驱动模块、从手(机械臂)等构成, 主从手采用完全相同的拓扑结构, 只是在几何尺寸上有差别. 这样设计使得主从手运动学模型一致, 主手的位姿即从手的位姿, 便于操作, 有利于控制和生产. 操作者操纵主手提供角位移信号, 控制单元以此控制从手移动相应的位移[3]. 从手各关节都带有力传感器,执行控制命令时, 能实时地将从手与目标物体接触的力信号反馈给控制单元, 并控制主手产生相应的反馈力, 使操作者在操作主手的过程中具有力觉临场感.图1为高压带电作业机器人系统示意图.图1 高压带电作业机器人系统构成2 运动控制系统的实现运动控制系统结构图如图 2所示, 操作者操纵主手, 主手各关节上的电位计检测移动位移, 输出 8路模拟量信号, 经 A/D 转换后, 输出给主控制器, 主从控制器之间经过光纤进行通信. 将主控制器发出的控制信号进行 D/A转换, 驱动各关节伺服阀,控制油缸移动相应的位移. 同时, 从手各关节传感器也会将信息反馈给从控制器, 并上传至主控单元.图2 控制系统结构图2.1 硬件实现运动控制器通过光纤与主控单元连接, 接收并解析主控系统下发的运动指令序列, 控制伺服阀驱动油缸和马达运动, 同时, 通过角位移传感器、压力传感器等实时采集油缸和液压马达的相关运动参数, 并上传至主控系统[7], 系统结构图如图 3所示. 选用 TRIO Euro209控制器, 它是针对运动控制领域独立开发出来的基于微处理技术的高精密数字运动控制器; 液压马达输出旋转运动, 能够将液压泵提供的液压能转变为机械能[4], 应选择体积小、重量轻、结构简单、对油液的污染不敏感的马达; 电位计要求体积小、比例系数高、精度±0.25%以上; 伺服阀与比例阀相比, 控制精度高、响应速度快, 它能够将输入的微小电气信号转换为大功率的液压信号(流量与压力)输出.图3 系统结构图2.2 软件实现上电以后, 首先对系统初始化, 之后, 系统进入自检状态, 自检通过后, 询问是否进行示教, 若示教则运行示教子程序; 若不示教, 则判断主手是否移动,运行位置子程序. 主程序流程图如图4所示.位置伺服控制会实时检测主手各关节的运动状态,从而执行从手相应关节运动, 并将位移信号反馈回来,做差比较, 继而使从手跟踪主手位移[5,6]. 流程图如 5所示.图4 主程序流程图图5 关节移动程序流程图3 控制策略的研究位置伺服控制是以移动部件位移为控制量的自动控制系统, 如图6所示, 它由位置检测、位置控制、伺服驱动、执行器几部分组成, 其中位置控制是核心. 对电液伺服控制系统来说, 位置指令一般来自外部给定,即操作者移动的位移, 执行器为伺服阀、伺服油缸和伺服马达[7].图6 位置伺服控制框图操作者操纵主手产生关节位移, 作为控制指令输入给位置伺服控制器, 同时从手的关节位移通过角位移传感器反馈给位置伺服控制器, 两者比较作差产生位置偏差信号Pe, 将位置偏差信号与位置增益 Kv相乘产生位移指令 Vc, 然后通过控制算法(一般采用 PI运算)将位移指令转化为电压信号 Vn输出, 经过驱动电路驱动伺服阀, 通过流经阀的流量控制液压执行器(液压马达、液压油缸)的位移, 实现对机械臂从手的位置伺服控制[8].力反馈控制方法一直是国内外学者专家研究的热点, 控制方法的不同主要在于主从手两侧位置(或者速度)和力信息的不同组合, 构成不同的控制算法, 实现力觉反馈. 本文采用邓乐等专家提出的一种新型控制方法, 如图 7所示, 这种方法的特征是主手由主从手之间的力偏差和位置偏差混合控制, 从手由二者的位置偏差控制[10]. 图7 力/位置混合控制图中 OF ——操作者施加给主手的操纵力Fm ——驱动主手的反馈力Fs ——驱动从手的力Fe ——从手与环境之间的作用力X m ——主手操作位移X s ——从手动作位移设位移增益系数为βK、力反馈增益为αK、主手的阻尼系数为B、主手的转动惯量为 mJ, 由阻力=速度×阻尼系数; 力=加速度×转动惯量; 两个关系式以及图7可以写出力反馈主手和从手之间的位移方程和驱动力方程[9]:由式(1)可知控制量 sX 和 mF 是相互独立的. 这种控制方式既保证从手的控制精度, 又提高了操作系统的安全性. 可以有效地抑制系统内的动力学干扰,实现较为理想的力觉临场感.4 试验位置跟踪试验的目的是检验单纯的位置伺服控制和具有力反馈的力/位置混合控制两种方法对给定信号的跟踪情况, 进而选择较好的控制策略. 为方便起见, 选择正弦信号为给定信号[11], 如图8所示.图8 位置跟踪曲线图中, ①表示位置伺服控制下的跟踪曲线, ②为给定正弦信号, ③表示力位置混合控制跟踪曲线.由图可知, 在[0, π/2]内, 两条曲线的跟踪效果都非常好, 跟踪误差接近于零; 在[π/2, 3π/2]内, ①比②跟踪效果好; 在[3π/2, 2π], ②的跟踪效果比①好. 总之, ①线, 即力/位置混合控制方法能更好的完成跟踪试验.5 总结随着信息技术的发展和自动化水平的提高, 利用遥操作机器人代替人类完成危险场合的作业任务已经变得非常普遍, 技术也逐渐趋于成熟, 但是一些控制方式还处于摸索阶段. 本文采用力位置混合控制策略, 既保留了位置伺服控制的优点, 又使系统具有力觉临场感. 并由MATLAB仿真曲线证明了此控制方式跟踪效果较好.参考文献【相关文献】1 韩江义,游有鹏,王化明.夹钳式力反馈遥微操作系统的设计与试验.机器人,2010,32(2):184-188.2 鲁守银.高压带电作业机器人的研究.上海:上海交通大学,2003,11.3 鲁守银,马培荪.高压带电作业机器人的研制.电力系统自动化,2003,27(17):56-58.4 杨申申,汤国伟,王璇.深海液压主从式机械手控制器.海洋技术.2009,28(1):4-7.5 Wu GP, Xiao XH, Xiao H, Dai JC, Bao WJ, Hu J.Development of a mobile inspection robot for high voltage power transmission line. Automation of Electric Power Systems, 2006. 13.6 Imaida T, Yokokohji Y, Doi T, Oda M, Yoshikawa T. Groundspace bilateral teleoperation of ets-vii robot arm by direct bilateral coupling under 7-s time delay condition. IEEE Trans.Robotics Automat, 2010,20:499-511.7 Zhou FY, Wu AG, Li YB. An inspection robot running on 110kV power transmission line, Electric Power; 2008-03.8 邓乐,李新,赵丁选.新的遥操作工程机器人系统的双向控制策略研究.工程机械,2005,(7):47-49.9 邓乐.电液力反馈操纵杆及其双向伺服控制技术研究.长春:吉林大学,2007.10 Kudom iS, Yamada H, Muto T. Development of a hydraulic master slave system for tele-robotics haptic display device for usage of a hydraulic servo system. Proc. of 1st FPNI--PhD Symp, Hamburg, 2000: 467-474.11 Yang Y, Gao HL, Meng SM, Luo C, Ma XQ. Structural design of overhead line deicing robot. Electric Power Construction, 2009.。
基于主从控制技术的配网带电作业机器人研制
李长鹏;吴小钊;宋伟;崔宇
【期刊名称】《机械制造与自动化》
【年(卷),期】2024(53)1
【摘要】研制一种10 kV配网带电作业机器人以代替人工开展不停电作业。
根据D-H法对机械臂建模和运动学分析,通过Matlab验证模型的正确性。
采用关节空间控制方法,降低了控制系统复杂性,解决了主从控制的延时问题。
配网机器人主从控制系统通过电磁兼容检测,测试过程中未出现卡顿现象,符合国家检测标准。
经上杆断接引流线测试,验证了配网带电机器人关键技术的有效性和实用性。
【总页数】6页(P218-223)
【作者】李长鹏;吴小钊;宋伟;崔宇
【作者单位】许继集团有限公司;国网重庆电力公司电力科学研究院;许继电气股份有限公司
【正文语种】中文
【中图分类】TM241
【相关文献】
1.面向配网带电作业的主从遥操作机器人系统设计
2.主从式遥操作配网带电作业机器人研究
3.基于MATLAB的配网带电作业机器人运动学和作业路径仿真分析
4.基于双目视觉反馈遥操作的配网带电作业机器人设计与实验
5.基于激光雷达点云的配网带电作业机器人的目标识别
因版权原因,仅展示原文概要,查看原文内容请购买。