复杂控制系统
- 格式:ppt
- 大小:549.50 KB
- 文档页数:59

复杂系统控制理论及方法研究一、引言复杂系统是由多个互相作用的组成部分所构成的系统,具有不确定性、非线性、耦合性和多样性等特点。
由于其内部结构繁复,和外界相互作用复杂,因此对复杂系统的控制和优化问题一直是科学家和工程师们研究的热点。
复杂系统控制理论及方法是为了解决这一问题而形成的一种交叉学科,涵盖了数学、自动控制、计算机科学和机械工程等多个学科领域。
本文将重点介绍复杂系统控制理论及方法的研究现状和发展趋势。
二、复杂系统控制理论研究1.控制理论的基础概念复杂系统的控制需要在系统的行为、性质和可控性等方面进行深入分析,确定合适的控制策略和算法。
控制理论中的基本概念包括系统模型、控制对象、控制器和监测器等。
2.控制策略与算法控制策略在设计上采用的是系统级控制策略,从系统整体的角度思考,对系统进行统一的控制。
控制算法采用非线性控制算法,通过建立系统的数学模型和控制策略,利用优化方法对系统进行全局优化调整。
三、复杂系统控制方法研究1. 自适应控制方法自适应控制方法是能够自动调整控制策略参数的方法,能够快速适应系统变化。
该方法采用自适应神经网络优化算法,通过在线学习和逐步调整控制策略,使控制器的参数不断逼近最佳值,从而达到控制系统的稳定性和优化性能。
自适应控制方法适用于受到干扰、具有非线性和不确定性的复杂系统控制。
2. 模糊控制方法模糊控制方法是一种基于权重关系的控制方法,能够对复杂系统的特性进行拟合,处理模糊信息,适用于输入输出变量复杂难以描述的系统。
利用模糊规则建立模糊模型,从而实现对系统的控制。
该方法应用广泛,可用于各种复杂工程领域的控制问题,如电力系统、航空飞行控制等。
四、复杂系统控制方法应用研究1. 无人机控制探索无人机技术正在飞速发展,但由于自身特殊的复杂性,在控制过程中遇到众多困难。
通过采用现代控制理论和方法,探索无人机控制问题,可以有效改善其控制性能、提高其安全性和可靠性,也有利于推动无人机技术的发展。

复杂系统控制理论及其应用研究随着信息技术和系统科学的迅速发展,在日常生活中,我们经常面对各种复杂的系统,如生态系统、交通系统、市场经济等。
如何对这些复杂系统进行合理的控制,一直是人们关注的焦点。
复杂系统控制理论和方法是处理这些问题的有效工具。
一、什么是复杂系统复杂系统是指由许多相互连接、相互作用,其中包含大量部分相互独立的大量元素组成的系统,往往具有非线性、高度不确定、动态演化等特点。
复杂系统的研究内容涉及多个学科,包括物理学、数学、计算机科学、生物学、社会科学等。
复杂系统的结构和特性复杂多样,但通常存在着一些普遍的规律。
例如,许多复杂系统都表现出分形结构,即在不同的尺度上都具有相似的结构和性质。
这些规律的发现,为理解和控制复杂系统提供了重要的线索。
二、复杂系统控制的挑战与传统的线性系统相比,控制复杂系统具有更大的困难。
一方面,复杂系统的非线性和不确定性导致其行为难以预测和掌握,需要更加精细的模型和算法来描述和处理。
另一方面,复杂系统往往具有多层次、多尺度、多目标等特点,系统本身也是动态演化的,因此需要对系统的动态结构和演化进行更加深入的研究。
目前,控制复杂系统的研究主要围绕以下几个方向展开:1、系统建模与分析针对不同类型的复杂系统,需要建立适合的数学模型和理论框架。
常用的模型包括基于微分方程的状态空间模型、基于网络结构的图模型、基于统计方法的随机过程模型等。
建立适合的模型有助于深入理解复杂系统的本质机理和系统特性,并为控制系统提供基础。
2、复杂系统控制策略复杂系统的控制策略需要考虑多个方面的因素,如系统的输入输出关系、系统的状态反馈控制、控制目标是否可达、控制策略与系统性能的匹配等。
针对不同的复杂系统,需要设计出不同的控制方法和算法,如MPC(Model Predictive Control)、PID(Proportional Integral Derivative)算法等。
3、复杂系统的优化与协调控制在复杂系统中,单一的控制策略往往不能完全满足不同的优化目标。
21 复杂控制系统一、概述1、单回路控制系统——简单控制系统:在一般情况下能够满足生产控制要求。
特殊情况:系统干扰因素多、干扰变化剧烈,以及工艺特殊要求。
2、复杂控制系统——串级控制系统、比值控制系统、均匀控制系统、前馈控制系统、选择控制系统、分程控制系统等复杂系统--随着控制理论与工业应用的发展,包含的内容也不同,例如复杂大系统--人口系统,环境控制,能源控制,企业生产经营控制等。
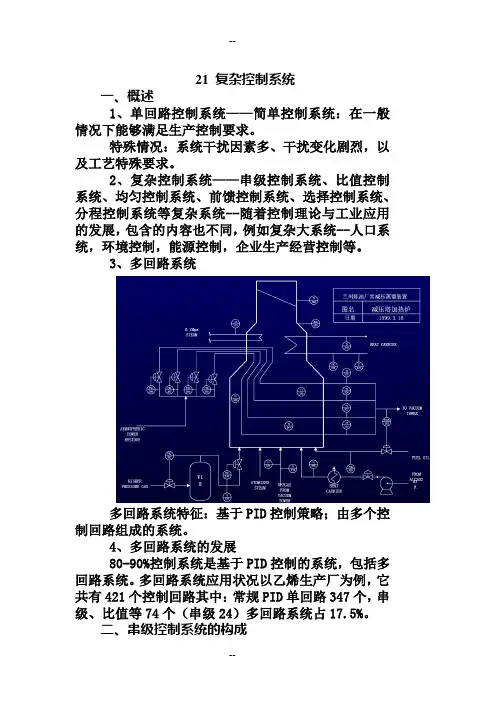
3、多回路系统多回路系统特征:基于PID控制策略;由多个控制回路组成的系统。
4、多回路系统的发展80-90%控制系统是基于PID控制的系统,包括多回路系统。
多回路系统应用状况以乙烯生产厂为例,它共有421个控制回路其中:常规PID单回路347个,串级、比值等74个(串级24)多回路系统占17.5%。
二、串级控制系统的构成加热炉是工业生产中常用设备之一。
工艺要求被加热物料的温度为某一定值,因此选取加热炉的出口温度为被控变量,选取燃料量为操纵变量,构成图5-1(a)所示的单回路控制系统。
影响炉出口温度的因素很多,主要有:被加热物料的流量和炉前温度变化[f1(t)];燃料热值的变化、压力的波动[f2(t)];烟囱挡板位置的改变、抽力的变化[f3(t)]等。
图5-1(a)系统的特点是,所有对被控变量的扰动都包含在这个回路之中,并都由温度控制器来克服。
但是控制通道的时间常数和容量滞后较大,控制作用不用及时,系统克服扰动的能力较差,不能满足工艺的要求。
为此,另外选择,炉膛温度为被控变量,燃料量为操纵变量,设计图5-1(b)所示的单回路控制系统,以维持炉口温度为某一定值。
该系统的特点是对于扰动[f2(t)] 、[f3(t)]能及时有效地克服,但是扰动[f1(t)]未包括在系统内,系统不能克服扰动[f1(t)]对炉出口温度的影响,仍然不能达到生产工艺要求。
综上分析,为了充分应用上述两种方案的优点,选取炉出口温度为被控变量,选择炉膛温度为中间辅助参数,把炉出口温度控制器的输出作为炉膛温度控制器的设定值,构成了图5-2所示的炉出口温度与炉膛温度的串级控制系统,图5-3是它的方块图。
复杂过程控制系统复杂过程控制系统是在工业生产中广泛应用的一种自动化控制系统。
它通常由多个子系统和分布式控制单元组成,用于监测和控制物理过程中的各种参数和变量。
这些系统通常用于化工、石油、电力、冶金和制药等行业,帮助提高生产效率、降低生产成本,并确保产品质量的稳定性。
1.传感器和执行器:传感器用于监测和测量物理过程中的各种参数,如温度、压力、流量和浓度等。
执行器用于控制各种执行设备,如阀门、开关和电机等。
2.控制器:控制器是系统的核心组件,负责处理传感器采集到的数据,并根据预定的控制算法进行计算和决策。
常见的控制算法包括PID控制、模糊逻辑控制和模型预测控制等。
3.通信网络:复杂过程控制系统通常是分布式的,需要通过通信网络将各个子系统和分布式控制单元连接起来,实现数据的传输和共享。
通信网络可以采用以太网、现场总线和无线通讯等多种技术。
4.数据存储和处理:复杂过程控制系统通常需要处理大量的实时数据,这些数据需要进行存储和处理,以便后续分析和优化。
常见的数据存储和处理技术包括数据库、数据仓库和大数据分析等。
5.人机界面:复杂过程控制系统通常需要人机界面来展示和操作控制系统的状态和参数。
人机界面可以采用计算机监视器、触摸屏和报警器等多种设备,以便操作员及时了解系统的运行状况并进行调整。
在复杂过程控制系统中,通常还需要考虑以下几个方面的问题:1.安全性:复杂过程控制系统通常处于高风险的工业环境中,因此安全性是一个重要考虑因素。
系统需要采取措施来防止任何非法、损坏或恶意的访问,并确保系统的稳定性和可靠性。
2.可靠性:复杂过程控制系统通常需要长时间的运行,因此可靠性是一个重要指标。
系统需要设计合理的备份机制和冗余系统,以防止单点故障导致系统的停机或数据丢失。
3.故障诊断和维护:系统需要具备故障诊断和维护功能,以便快速发现和解决系统中的故障。
这可以通过自动化的故障诊断系统和远程监控系统来实现。
4.系统集成:复杂过程控制系统通常由多个子系统和分布式控制单元组成,系统集成是一个重要的工作。
复杂控制系统一、一段炉水碳比1. 控制回路图2. 工艺控制描述工艺蒸汽在进入一段炉111-101B之前与脱硫后的天然气混合。
这个仪表复杂回路的目的是确定装置产量和期望的水碳比。
工艺蒸汽和原料天然气流量自动调节来保持产量和水碳比。
因为这个复杂控制系统的功能,FICA-A2502和FICA-A2503控制器都必须设定为远程(串级)给定模式。
3. 仪表描述在运算中蒸汽流量及天然流量均为摩尔流量。
原料天然气需要增加分子量自动校正功能,由中化分析天然气组分,工艺人员输入由DCS自动实现分子量计算。
实际的蒸汽原料气流量比(压力&温度补偿蒸汽流量FIA-A2503除以压力&温度补偿天然气流量流量FIA-A2502)由FFS-A2504显示。
一个内部联锁监测实际的蒸汽原料气流量比,如果这个比率低就报警并且在此比率低低报警钟时停车(I-101)。
操作人员也可以通过开关PB-101。
参见因果图63-D119停车动作。
操作人员用DCS手动点FFN-1001设定期望的水碳比。
操作人员用DCS手动点HIC-1001设定氨厂产量流率到期望的流率。
装置流率调整是“补偿器”由HN-1001斜率功能为最小过程干扰。
斜率功能限制流率改变,最大流率改变为5%的产量流率每小时。
由于在原料气中有高含量“惰气”(氮气和二氧化碳)的存在,于是采取了一些措施以便操作人员手动输入原料气组分数据校正原料气流量为碳流量。
工艺设计的基础水碳比为2.77。
工艺设计基础蒸汽原料气质量流量比为99729/76763或1.3。
碳仅占大约47%的原料气流量,所以除以质量流量由碳含量给出一个正确的水碳比2.77。
原料气组分数据可以从AI-1008A-F(62-D102)或人工取样分析获得。
斜率功能块(HN-1001)输出直接去原料气流量选择器(FFN-1001B)和蒸汽流量选择器(FFN-1001C)。
期望的水碳比(FFN-1001)输出直接去蒸汽流量除法器(FFN-1001A)和原料气流量乘法器(FFN-1001D)。