常用复杂控制系统
- 格式:ppt
- 大小:948.50 KB
- 文档页数:46



21 复杂控制系统一、概述1、单回路控制系统——简单控制系统:在一般情况下能够满足生产控制要求。
特殊情况:系统干扰因素多、干扰变化剧烈,以及工艺特殊要求。
2、复杂控制系统——串级控制系统、比值控制系统、均匀控制系统、前馈控制系统、选择控制系统、分程控制系统等复杂系统--随着控制理论与工业应用的发展,包含的内容也不同,例如复杂大系统--人口系统,环境控制,能源控制,企业生产经营控制等。
3、多回路系统多回路系统特征:基于PID控制策略;由多个控制回路组成的系统。
4、多回路系统的发展80-90%控制系统是基于PID控制的系统,包括多回路系统。
多回路系统应用状况以乙烯生产厂为例,它共有421个控制回路其中:常规PID单回路347个,串级、比值等74个(串级24)多回路系统占17.5%。
二、串级控制系统的构成加热炉是工业生产中常用设备之一。
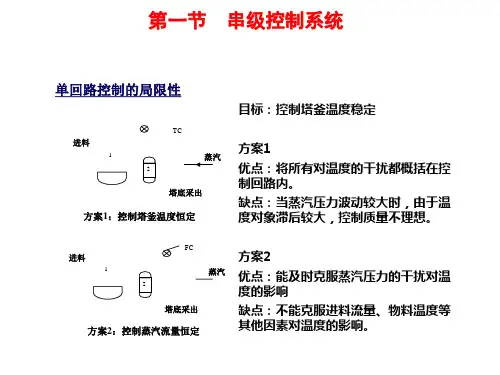
工艺要求被加热物料的温度为某一定值,因此选取加热炉的出口温度为被控变量,选取燃料量为操纵变量,构成图5-1(a)所示的单回路控制系统。
影响炉出口温度的因素很多,主要有:被加热物料的流量和炉前温度变化[f1(t)];燃料热值的变化、压力的波动[f2(t)];烟囱挡板位置的改变、抽力的变化[f3(t)]等。
图5-1(a)系统的特点是,所有对被控变量的扰动都包含在这个回路之中,并都由温度控制器来克服。
但是控制通道的时间常数和容量滞后较大,控制作用不用及时,系统克服扰动的能力较差,不能满足工艺的要求。
为此,另外选择,炉膛温度为被控变量,燃料量为操纵变量,设计图5-1(b)所示的单回路控制系统,以维持炉口温度为某一定值。
该系统的特点是对于扰动[f2(t)] 、[f3(t)]能及时有效地克服,但是扰动[f1(t)]未包括在系统内,系统不能克服扰动[f1(t)]对炉出口温度的影响,仍然不能达到生产工艺要求。
综上分析,为了充分应用上述两种方案的优点,选取炉出口温度为被控变量,选择炉膛温度为中间辅助参数,把炉出口温度控制器的输出作为炉膛温度控制器的设定值,构成了图5-2所示的炉出口温度与炉膛温度的串级控制系统,图5-3是它的方块图。
复杂控制系统。
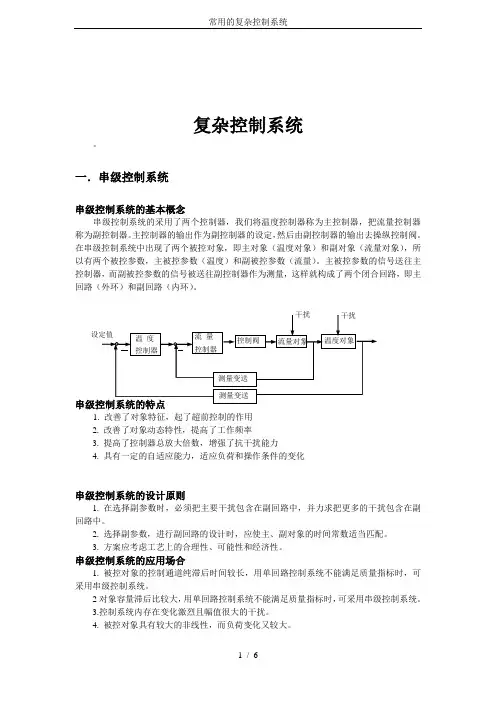
一.串级控制系统串级控制系统的基本概念串级控制系统的采用了两个控制器,我们将温度控制器称为主控制器,把流量控制器称为副控制器。
主控制器的输出作为副控制器的设定,然后由副控制器的输出去操纵控制阀。
在串级控制系统中出现了两个被控对象,即主对象(温度对象)和副对象(流量对象),所以有两个被控参数,主被控参数(温度)和副被控参数(流量)。
主被控参数的信号送往主控制器,而副被控参数的信号被送往副控制器作为测量,这样就构成了两个闭合回路,即主回路(外环)和副回路(内环)。
1. 改善了对象特征,起了超前控制的作用2. 改善了对象动态特性,提高了工作频率3. 提高了控制器总放大倍数,增强了抗干扰能力4. 具有一定的自适应能力,适应负荷和操作条件的变化串级控制系统的设计原则1. 在选择副参数时,必须把主要干扰包含在副回路中,并力求把更多的干扰包含在副回路中。
2. 选择副参数,进行副回路的设计时,应使主、副对象的时间常数适当匹配。
3. 方案应考虑工艺上的合理性、可能性和经济性。
串级控制系统的应用场合1. 被控对象的控制通道纯滞后时间较长,用单回路控制系统不能满足质量指标时,可采用串级控制系统。
2对象容量滞后比较大,用单回路控制系统不能满足质量指标时,可采用串级控制系统。
3.控制系统内存在变化激烈且幅值很大的干扰。
4. 被控对象具有较大的非线性,而负荷变化又较大。
串级控制系统应用中的问题1. 主、副控制器控制规律的选择串级控制系统中主、副控制器的控制规律选择都应按照工艺要求来进行。
主控制器一般选用PID控制规律,副控制器一般可选P控制规律。
2. 主、副控制器正、反作用方式的确定。
副控制器作用方式的确定,与简单控制系统相同。
主控制器的作用方向只与工艺条件有关。
3. 串级控制系统控制器参数整定⑴在主回路闭合的情况下,主、副控制器都为纯比例作用,并将主控制器的比例度置于100%,用4:1衰减曲线法整定副控制器,求取副回路4:1衰减过程的副控制器比例度(δ2p)以及操作周期(T2P)。
常用的几种复杂控制在DCS系统中的应用摘要随着化工行业的发展,系统的控制发挥了重要的作用,并且在化工行业的发展中,为了满足工艺生产条件的控制,应用最多的是较为复杂的控制。
本文笔者就当前应用较为广泛的几种复杂控制进行了相应的阐述,介绍了各个方案的控制原理以及在系统中的应用情况,目的是为复杂控制在DCS系统中的应用提供指导和借鉴。
关键词复杂控制;DCS系统;比值控制;分程控制;串级控制DCS系统需要复杂控制来为系统的正常运行提供有力的条件和支持,以便促进系统的正常运行。
同时对于系统的复杂控制的方法较多,本文着重阐述集中常用的复杂控制,以便为对复杂控制在DCS系统中的应用进行总结和分析。
1常用复杂控制的原理1.1比值控制在化工生产的过程中,很多工作需要将材料同时投入到反应器中,这就需要借助于比值控制,进而确定各种材料的比例,实现化工生产的的顺利进行,因为化工生产是一个特殊的生产过程,对各个材料的比例有严格的要求,因此需要利用比值控制对原料等比例进行有效地控制,进而推进化工生产工作的开展。
以甲醛制备为例,为了实现生产的安全和高效率,需要对四种材料的比例进行分析和控制,这就需要借助于比值控制,利用比值控制的组态策略,计算出其他三种原料气体的体积量,最终实现甲醛制备的完成。
在实际的生产控制过程汇总,实际的工作环境是处于不断发展变化中,并且设备本身也存在一定的差异性,这就容易导致一种原料的进料量产生变化,为了满足生产的需要,另一种原料也要跟随第一种原料的变化而变化,确保两种原料的设定值是不变的,在比值控制的帮助下,计算出输出的设定值,即调节模块的设定值,在不断的比较运算中,通模块的输出来控制调节阀,决定调节阀的开度,又对原料进行调整,进而实现两种原料量的协调。
可见,比值控制对化工生产中原料用量的控制和协调起到了很好的控制作用。
1.2分程控制一般而言,通过对一只调节阀的操作便能够实现对一台调节器的输出工作,如果通过一只调节器对两个或者是两个以上的调节阀进行控制,并且是通过对信号的分析根据不同的需求去对不同的阀门进行操作,这种控制方式就是分程控制。